Изобретение относится к области садоводства, а именно к средствам контроля физико-механических свойств ягод.
Усилие отрыва ягод от плодоножки или ветви растения - один из важных показателей качества, на получение заданного значения которого ведется селекционная работа. Этот показатель в существенной степени определяет производительность труда при ручном сборе урожая, пригодность сорта к механизированному сбору, потери при уборке, а также используется при разработке ягодоуборочных машин и механизмов [Пантелеева Е.И. Облепиха крушиновая (Hippophae rhamnoides L.): монография / Рос. акад. с.-х. наук. Сиб. отд-ние. Науч. исслед. ин-т садоводства Сибири. - Барнаул, 2006. - С.63-69, 119-121]. Так, например, для облепихи селекция ведется на снижение усилия отрыва, а для жимолости, наоборот - на повышение. Для определения усилия отрыва в полевых условиях специалистами используются пружинные динамометры, которые имеют следующие недостатки: низкую точность; не имеют захватных устройств, специально приспособленных для ягод; определение значения усилия в момент отрыва осуществляется оператором визуально и субъективно. Наиболее совершенными являются портативные электронные динамометры, среди которых наиболее близким аналогом изобретению является индикатор усилия отрыва ягод [Измерение усилия отрыва ягод облепихи / А.Ф.Алейников, В.В.Минеев, В.А.Золотарев, С.Н.Хабаров // Достижения науки и техники в АПК. - 2010. - № 10. - С.78-80]. Прибор состоит из портативного корпуса, с расположенными в нем силоизмерительным датчиком, электроизмерительной схемой и цифровым индикатором, а также вилкообразного захвата ягод, механически соединенного с силоизмерительным датчиком через стержневой распределитель силы. Электроизмерительная схема прибора снабжена пиковым детектором, что позволяет фиксировать максимальные (пиковые) значения силы в момент отрыва ягоды. Недостатком данного технического решения является конструкция захвата ягод, не приспособленная для отрыва ягод с плотным расположением в кисти и короткой плодоножкой (облепиха, виноград и т.п.). Кроме того, после отрыва ягода падает на землю, потому что прибор не содержит улавливающего устройства, что создает дополнительные неудобства, так как после отрыва ягоды обычно проводят измерения прочности ее кожицы на раздавливание.
Техническим результатом предлагаемого изобретения является повышение производительности контрольных операций за счет обеспечения удобного захвата ягод с плотным расположением в кисти и затрудненным доступом к плодоножке и их улавливания после отрыва.
Технический результат в изобретении достигается тем, что в прибор для измерения усилия отрыва ягод, состоящий из портативного корпуса с расположенными в нем силоизмерительным датчиком, цифровым индикатором и электроизмерительной схемой, снабженной пиковым детектором, а также захвата ягод, механически соединенного с силоизмерительным датчиком через стержневой распределитель силы, введено устройство управления захватом, а захват выполнен в виде шарнирно соединенных неподвижной и подпружиненной подвижной захватных чашеобразных губок, охватывающих ягоду со стороны, противоположной ее креплению с плодоножкой, при этом хвостовик неподвижной губки закреплен на стержневом распределителе силы, а хвостовик подвижной губки для обеспечения открывания и закрывания губок кинематически связан с устройством управления захватом. Устройство управления захватом состоит из гибкого троса, выполненного, например, из прочной нерастягивающейся нити, направляющего ролика, закрепленного на стержневом распределителе силы, а также из закрепленного на внешней стороне корпуса прибора механического привода, снабженного подвижным штоком с ручкой для перемещения этого штока пальцем оператора и возвратной пружиной для приведения штока в исходное состояние, при этом кинематическая связь хвостовика подвижной губки с устройством управления захватом осуществлена огибающим направляющий ролик гибким тросом, один конец которого закреплен на хвостовике подвижной губки, а второй - на наружном конце штока так, что в исходном состоянии подвижного штока нет механического воздействия устройства управления на захват. Верхние кромки захватных чашеобразных губок, сходящиеся к плодоножке, выполнены с вырезами в центральной части, исключающими перерезание плодоножки при закрывании губок. Таким образом, данное техническое решение обеспечивает подачу захватных элементов не сбоку, а спереди ягоды, так что соседние ягоды не мешают продвижению верхних кромок захватных губок вглубь кисти, а чашеобразная форма губок и их открывание и закрывание с помощью устройства управления захватом обеспечивают нетравматичный отрыв и улавливание ягод.
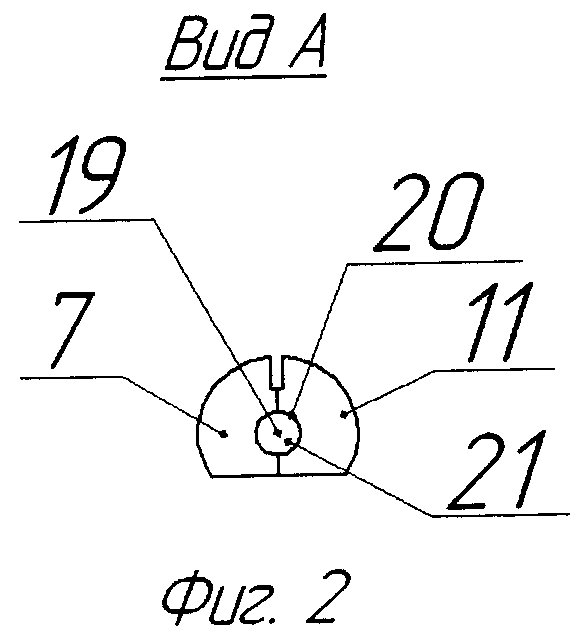
На фиг.1 изображен чертеж внешнего вида прибора для измерения усилия отрыва ягод (вид сбоку), а на фиг.2 - чертеж внешнего вида захватных губок (вид сверху).
Прибор состоит из портативного корпуса 1, на передней стенке которого находятся кнопки управления 2, цифровой индикатор 3, а на задней - механический привод 4 устройства управления захватом. Внутри корпуса 1 размещена электроизмерительная схема, снабженная пиковым детектором, и силоизмерительный датчик (не показаны), механически соединенный со стержневым распределителем силы 5, выходящим наружу через отверстие в корпусе 1. На другом конце распределителя силы 5 закреплен хвостовик 6 неподвижной захватной чашеобразной губки 7 и ось 8, с установленным на ней направляющим роликом 9. Неподвижная захватная чашеобразная губка 7 посредством оси 10 шарнирно соединена с подвижной захватной чашеобразной губкой 11, имеющей хвостовик 12, таким образом, что при сближении хвостовиков 6 и 12 верхние кромки захватных чашеобразных губок 7 и 11 расходятся. К хвостовику 12 прикреплена прочная гибкая нерастягивающаяся нить 13. Второй конец нити 13 пропущен через отверстие в хвостовике 6 и прикреплен с помощью регулировочной гайки к наружному концу подвижного штока 14 механического привода 4 так, что нить 13 огибает направляющий ролик 9 и в исходном состоянии, показанном на фиг.1, ненатянута. Подвижный шток 14 снабжен ручкой 15 для перемещения его пальцем оператора. В механическом приводе 4 установлена пружина 16, фиксируемая гайкой 17, а между захватными чашеобразными губками 7 и 11 - пружина 18 для возврата соответственно подвижного штока 14 и захватной чашеобразной губки 11 в исходное состояние, как показано на фиг.1. Верхние кромки захватных чашеобразных губок 7 и 11, сходящиеся к плодоножке 19, выполнены с вырезами 20 (см. фиг.2), исключающими перерезание плодоножки 19 при закрывании губок 7 и 11. Ягода 21 свободно заключена в пространстве между губками 7 и 11 и благодаря чашеобразной форме губок 7 и 11 после отрыва остается в этом же пространстве.
Прибор для измерения усилия отрыва ягод работает следующим образом. Корпус прибора 1 необходимо взять в ладонь правой или левой руки, при этом большой палец должен находиться вблизи кнопок управления 2, а сам прибор - в положении совпадения оси симметрии стержневого распределителя силы 5 с предполагаемым направлением вектора силы растяжения, прилагаемой к плодоножке 19. Большим пальцем с помощью кнопок управления 2 производится сброс прибора в исходное нулевое состояние и запуск режима измерений. Затем производится захват исследуемой ягоды 21. Для этого указательным пальцем руки оператор ручкой 15 перемещает подвижный шток 14 в направлении нижней части корпуса 1, в результате чего нить 13 тянет хвостовик 12 подвижной захватной чашеобразной губки 11, и верхние кромки захватных чашеобразных губок 7 и 11 расходятся. Не опуская ручки 15, оператор вводит губки 7 и 11 захвата внутрь кисти так, чтобы исследуемая ягода 21 оказалась между губками 7 и 11. Затем оператор опускает ручку 15, нить 13 ослабевает, захватные чашеобразные губки 7 и 11 под действием возвратной пружины 18 смыкаются, плодоножка 19 оказывается внутри вырезов 20 (см. фиг.2), а подвижный шток 14 механического привода 4 под действием пружины 16 возвращается в исходное состояние. Отрыв ягоды 21 осуществляется оператором путем перемещения корпуса 1 на себя. При этом плодоножка 19 натягивается, а возникающая сила растяжения через стержневой распределитель силы 5 передается на силоизмерительный датчик. Сигнал датчика преобразуется электроизмерительной схемой в цифровой код, числовое значение которого отображается на цифровом индикаторе 3 в единицах силы. В момент отрыва ягоды показания цифрового индикатора 3 являются максимальными и благодаря наличию пикового детектора в электроизмерительной схеме фиксируются на цифровом индикаторе 3 и считываются оператором. Ягода 21 извлекается из захвата путем раскрытия захватных чашеобразных губок 7 и 11 нажатием на ручку 15 подвижного штока 14 механического привода 4.
Изобретение может быть осуществлено на базе портативных силоизмерительных индикаторов, цифровых динамометров, состоящих из разборного корпуса с силоизмерительным датчиком, электроизмерительной схемой, цифровым индикатором, кнопками управления и набором сменных крюков, захватов, которые широко представлены на рынке приборов. Например, силоизмерительные индикаторы DN-FGA фирмы DACELL (Ю. Корея) [www.dacell.ru], цифровые динамометры растяжения DPS фирмы IMADA [www.tes-s.ru], силоизмерительные устройства BFG, CFG фирмы MECMESIN (Англия) [www.mecmesin.ru]. Предлагаемая конструкция захвата прибора для измерения усилия отрыва ягод легко сопрягается с датчиком силы этих устройств путем замены штатных сменных крюков и захватов, а механический привод 4 устанавливается на препарированную заднюю стенку корпуса.
Испытания экспериментального образца прибора для измерения усилия отрыва ягод, изготовленного на базе электронного динамометра LYMAN (США) [www.wht.ru], выявили следующие характеристики:
диаметр исследуемых ягод от 5 до 16 мм;
диапазон определяемых сил от 0,098 (10) Н (гс) до 19,60 (2000) Н (гс);
цена единицы наименьшего разряда 0,0196 (2,0) Н (гс);
пределы допускаемой систематической составляющей основной абсолютной погрешности силы в диапазоне от 0,098 (10) до 1,96 (200) Н (гс) ± 0,039 (4,0) Н (гс); в диапазоне от 1,96 (200) до 14,7 (1500) Н (гс) ± 0,098 (10) Н (гс); в диапазоне от 14,7 (1500) до 19,6 (2000) Н (гс) ± 0,196 (20) Н (гс).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ПРОЧНОСТНЫХ ХАРАКТЕРИСТИК ЯГОД | 2013 |
|
RU2538401C2 |
| Комбинированный прибор для определения прочностных характеристик ягод | 2016 |
|
RU2630199C2 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ РАЗДАВЛИВАНИЯ ЯГОД | 2011 |
|
RU2472123C1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ РАСТЕНИЙ | 2013 |
|
RU2547439C2 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |
| Устройство для прокатки колец шарикоподшипников | 1988 |
|
SU1803240A1 |
| Устройство для измерения силы нажатия щетки на коллектор электрической машины | 1989 |
|
SU1741214A1 |
Изобретение относится к области садоводства, а именно к средствам контроля физико-механических свойств ягод. Прибор состоит из портативного корпуса с расположенными в нем силоизмерительным датчиком, цифровым индикатором и электроизмерительной схемой, снабженной пиковым детектором, а также захвата ягод, механически соединенного с силоизмерительным датчиком через стержневой распределитель силы, и устройства управления захватом. Захват выполнен в виде шарнирно соединенных неподвижной и подпружиненной подвижной захватных чашеобразных губок, охватывающих ягоду со стороны, противоположной ее креплению с плодоножкой. Хвостовик неподвижной губки закреплен на стержневом распределителе силы, а хвостовик подвижной губки для обеспечения открывания и закрывания губок кинематически связан с устройством управления захватом. Технический результат заключается в повышении производительности контрольных операций. 2 з.п. ф-лы, 2 ил.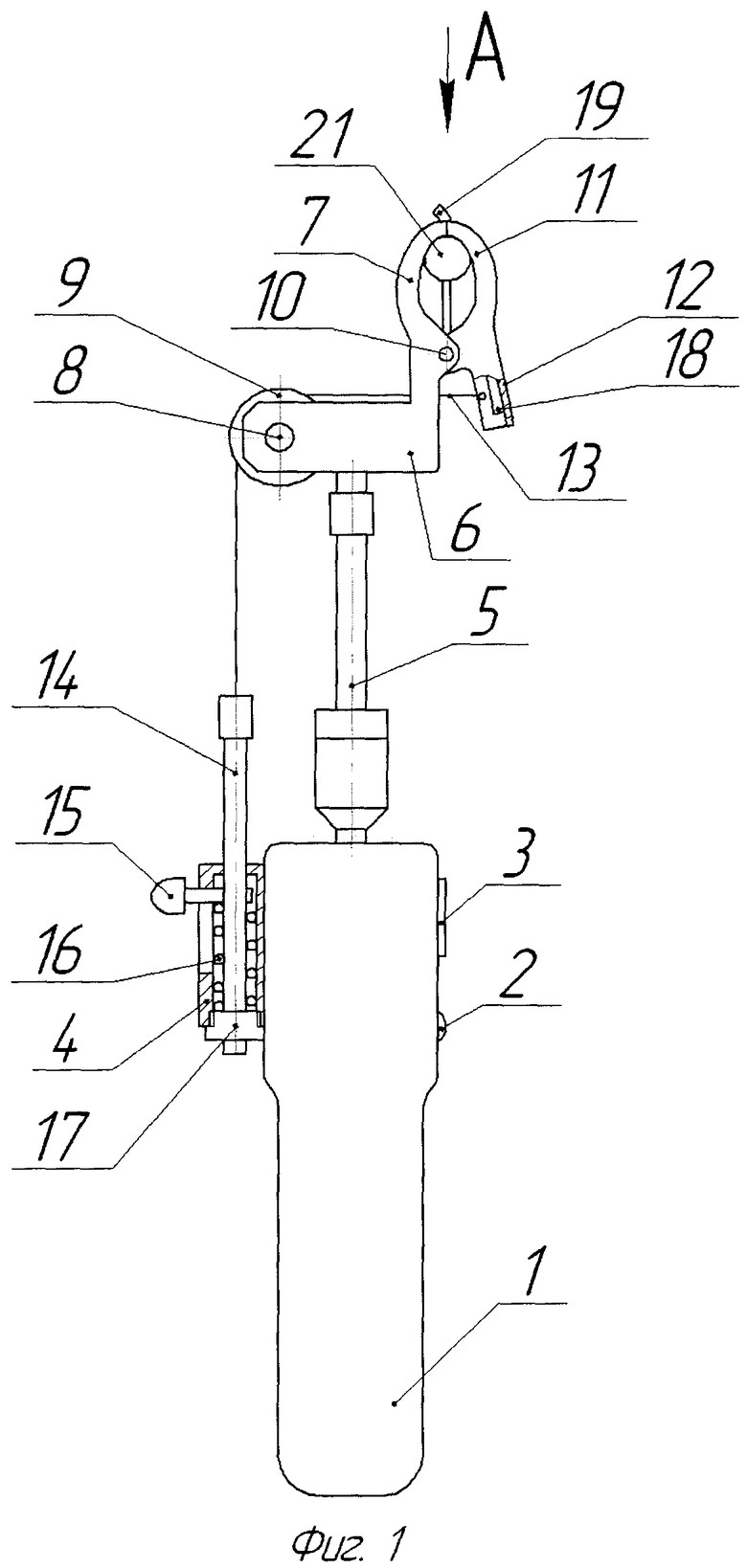
1. Прибор для измерения усилия отрыва ягод, состоящий из портативного корпуса с расположенными в нем силоизмерительным датчиком, цифровым индикатором и электроизмерительной схемой, снабженной пиковым детектором, а также захвата ягод, механически соединенного с силоизмерительным датчиком через стержневой распределитель силы, отличающийся тем, что в него введено устройство управления захватом, а захват выполнен в виде шарнирно соединенных неподвижной и подпружиненной подвижной захватных чашеобразных губок, охватывающих ягоду со стороны, противоположной ее креплению с плодоножкой, при этом хвостовик неподвижной губки закреплен на стержневом распределителе силы, а хвостовик подвижной губки для обеспечения открывания и закрывания губок кинематически связан с устройством управления захватом.
2. Прибор для измерения усилия отрыва ягод по п.1, отличающийся тем, что устройство управления захватом состоит из гибкого троса, выполненного, например, из прочной нерастягивающейся нити, направляющего ролика, закрепленного на стержневом распределителе силы, а также из закрепленного на внешней стороне корпуса прибора механического привода, снабженного подвижным штоком, ручкой для перемещения этого штока вдоль его оси пальцем оператора и возвратной пружиной для приведения штока в исходное состояние, при этом кинематическая связь хвостовика подвижной губки с устройством управления захватом осуществлена огибающим направляющий ролик гибким тросом, один конец которого закреплен на хвостовике подвижной губки, а второй - на наружном конце штока так, что в исходном состоянии подвижного штока нет механического воздействия устройства управления на захват.
3. Прибор для измерения усилия отрыва ягод по п.1 или 2, отличающийся тем, что верхние кромки захватных чашеобразных губок, сходящиеся к плодоножке, выполнены с вырезами в центральной части, исключающими перерезание плодоножки при закрывании губок.
| Совершенствование инструментального контроля технологии производства пищевого ягодного сырья / А.Ф.Алейников, В.А.Золотарев, В.В.Минеев, В.М.Фурзиков // Найвовите постижения на европейската наука - 2011: материали за 7-й международна научна практична конференция (София, 17-25-ти юни, 2011 на сельско стопанство) | |||
| - София: «БялГРАД БГ» ООД, |

