/ П 16 9
li 2 3
/г 13 $
6 7
4;:
сд
;0 ел
А-
Фие.1
Изобретение относится к машиностроению, а именно к схватам манипуляторов, предназначенных для механизации и автоматизации монтажно-сборочных, подъемно- транспортных и других технологических операций.
Целью изобретения является повышение надежности зажатия.
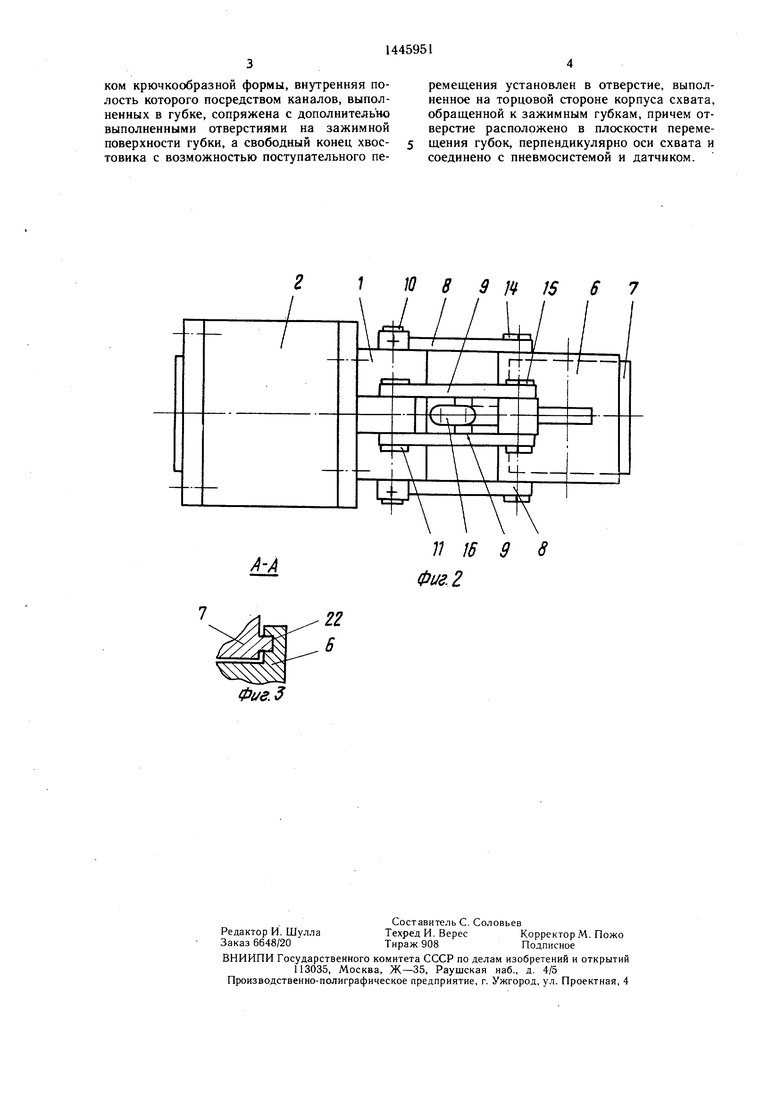
На фиг. 1 изображен схват манипулятора разрез; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг. 1.
Схват манипулятора содержит корпус 1, на котором установлен привод, выполненный в виде силового цилиндра 2 со штоком- поршнем 3, возвратной пружиной 4 и вилкой 5, захватные рычаги 6 с зажи.мными губками 7 и параллелограммные подвески, ве- душие 8 и ведомые 9 звенья которых связаны с одной стороны через оси 10 и 11, рычаги 12 и штифты 13 с вилкой 5 и корпусом 1, а с другой - с рычагами 6 посредством осей 14 и 15. Каждая зажимная губка 7 выполнена в виде призмы, подвижна в осевом направлении и снабжена хвостовиком 16 крючкообразной формы, свободный конец которого с возможностью поступательного перемещения установлен в отверстие 17, выполненное на торцовой стороне корпуса 1, обращенной к зажимным губкам. Хвостовик 16 выполнен полым и посредством каналов 18 сообщается с отверстиями 19, выполненными на зажимных плоскостях губок, а полость отверстия 17 расположена в плоскости перемещения губок, перпендикулярно оси схвата, и соединена посредством трубопровода 20 через регулирующее устройство (не показано) с пневмосистемой и датчиком 21, например пневмоэлектропреобразователем. Зажимная губка 7 перемещается в корпусе рычага 6 по прямолинейным пазам 22. В захватной части губок зажата деталь 23.
Схват манипулятора работает следующим образом.
В процессе работы манипулятора, например при зажиме детали 23, устройство управления манипулятором выдает сигнал на регулирующее устройство (не показаны), которое соединяет пневмосистему с отверс- тием 17 в корпусе схвата через трубопровод. Сжатий воздух через отверстие 17 корпуса, полые хвостовики 16 поступает во внутреннюю полость зажимных губок 7 и выходит через отверстия 19, выполненные на зажимных поверхностях губок. С некоторой задержкой регулирующее устройство соединяет пневмосистему с силовым цилиндром 2 схвата. Шток-поршень 3 стягивается в силовой цилиндр 2 и сжимает возвратную пружину 4. Вместе со штоком-поршнем 3 перемещается и вилка 5, которая через оси 10 и 11, рычаги 12 и штифты 13 поворачивает ведущее 8 и ведомое 9 звенья параллелограм- мной подвески. Подвеска через оси 14 и
0
5
0
5
0
5
0
5
0
5
15 передает движение на рычаги 6 с губками 7 и губки сближаются. При этом сжатый воздух, вытекающий из отверстий 19, выполненных на зажимных плоскостях губок, обеспечивает сдув стружки с обработанной на станке детали 23 при ее захвате, а также контроль ее наличия в губках схвата, так как после сжатия детали губками значительная часть отверстий 19 перекрывается деталью 23, а при повышении давления в полости отверстия 17 срабатывает датчик, например пневмоэлектропреобразователь 21. Поступающий от него в устройство управ ления сигнал свидетельствует о надежном зажиме детали 23. При изменении диаметра захватываемой детали 23 рычаги 6 с зажимными губками 7 расходятся (сходятся), однако хвостовик 16, перемещаясь при этих смещениях в отверстии 17, обеспечивает постоянное центрирование оси детали 23. Крючкообразная форма хвостовика 16 обладает незначительной податливостью и предотвращает его заклинивание в прямолинейном отверстии 17 корпуса схвата при зажиме (разжиме) губок. Сжатый воздух, поступающий в отверстие 17 и попадающий в зазор между хвостовиком 16 и стенками отверстия, также способствует уменьшению сопротивления трущихся поверхностей. Смена зажимных губок 7, конфигурация и размеры которых могут изменяться в зависимости от выполняемых манипулятором работ и номенклатуры деталей, осуществляется следующим образом. По сигналу оператора регулирующее устройство соединяет рабочую полость силового цилиндра 2 с атмосферой. Под действием возвратной пружины 4 шток-поршень 3 перемещает вилку 5 в правое крайнее положение, которая через рычаги 12, ведущие 8 и ведомые 9 звенья раскрывает губки 7. Величина раскрытия губок 7 определяется съемными упорами (не показаны), в которые могут упираться, например, ведущие 8 или ведомые 9 звенья параллелограммной подвески и которые не позволяют хвостовикам 16 выйти из отверстия 17. После снятия упоров возвратная пружина 4 перемещает Шток-поршень 3 до упора в стенку корпуса 1 и хвостовики 16 выходят из отверстий 17. Зажимная губка 7 с хвостовиком 16 при перемещении от корпуса схвата выходит из прямолинейных пазов 22 рычага 6 и может быть заменена на другую.
Формула изобретения
Схват манипулятора, содержащий корпус, зажимные губки, кинематически связанные с корпусом и приводом и установленные с возможностью поступательного перемещения, отличающийся тем, что, с целью повышения надежности зажатия, каждая зажимная губка снабжена полым хвостовиком крючкообразной формы, внутренняя полость которого посредством каналов, выполненных в губке, сопряжена с дополнительно выполненными отверстиями на зажимной поверхности губкн, а свободный конец хвостовика с возможностью поступательного перемещения установлен в отверстие, выполненное на торцовой стороне корпуса схвата, обращенной к зажимным губкам, причем отверстие расположено в плоскости перемещения губок, перпендикулярно оси схвата и соединено с пневмосистемой и датчиком.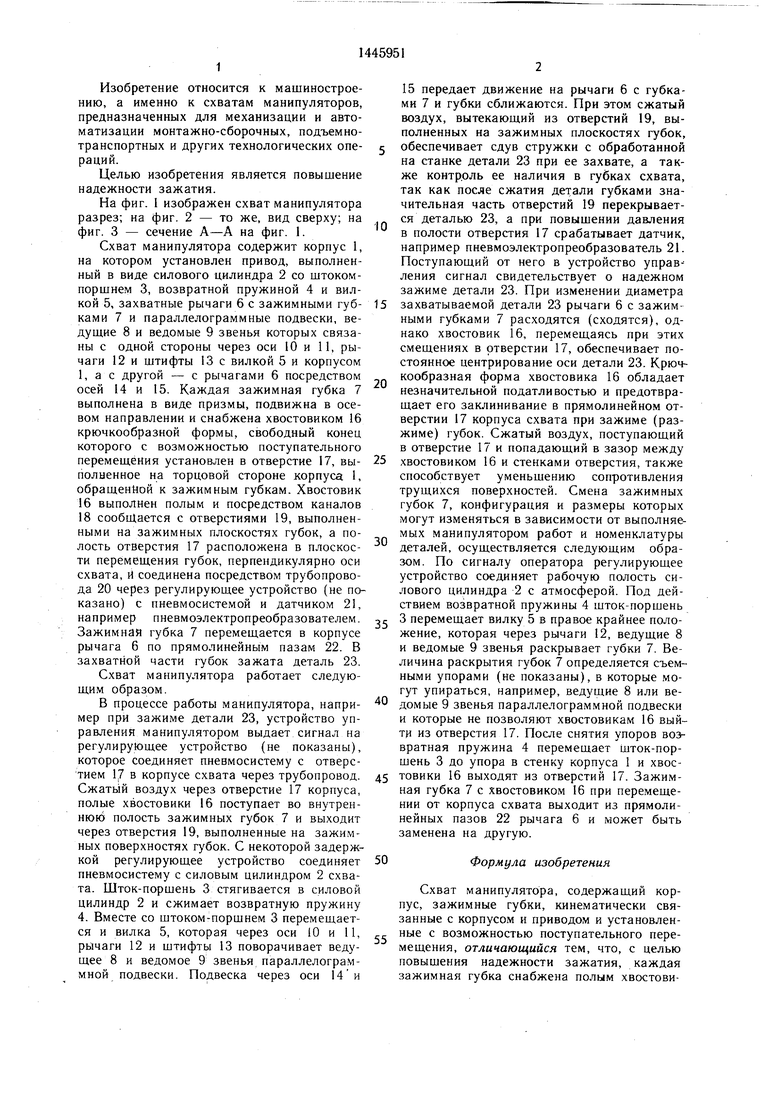
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Схват | 1986 |
|
SU1390021A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Схват манипулятора | 1979 |
|
SU804426A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
Изобретение относится к машиностроению, а именно к схватам манипуляторов, предназначенных для механизации и автоматизации технологических операций. Цель изобретения - повышение надежности работы схвата. Каждая из зажимных губок 7 схвата, установленных с возможностью поступательного перемешения, снабжена полым хвостовиком 16 крючкообразной формы. Внутренняя полость хвостовика сопряжена с отверстиями 19 на зажимной поверхности губки 7, а его свободный конец установлен в отверстие 17 на торцовой стороне схвата, расположенное в плоскости перемещения губок и соединенное с пнеимосистемой. При захвате детали 23 пневмосистема соединяется с отверстием 17, воздух через полые хвостовики 16 поступает во внутренние полости губок 7 и выходит через отверстия 19 на зажимных плоскостях губок. При сведении губок 7 и захвате детали 23 часть отверстий 19 перекрывается деталью, давление в полости отверстия 17 повышается, и датчик 21 выдает сигнал о надежном захвате детали. При изменении диаметра захватываемой детали за счет возможности хвостовика 16 перемещаться поступательно относительно отверстия 17 обеспечивается постоянное центрирование оси захватываемой детали. 3 ил. ( (Л
)
Фие.З
11 W 9 8 Фиг. 2
| "Способ непрерывного формования | 1976 |
|
SU751629A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
