Область техники
Настоящее изобретение относится к интеграции боевой нагрузки с летательным аппаратом, а конкретнее к оценке времени полета и зоне попадания на поверхности земли интеллектуальной (автоуправляемой) нагрузки, запущенной с летательного аппарата.
Предшествующий уровень техники
Зона попадания баллистической или интеллектуальной нагрузки на земле - это зона, в которой должна располагаться цель, чтобы быть успешно пораженной нагрузкой. Размер и форма зоны зависит от полетных условий летательного аппарата при сбрасывании нагрузки, от атмосферных условий (например, температуры, влажности и ветра) и от заданных условий попадания по цели (например, направления прилета и угла атаки нагрузки относительно цели, желательной скорости нагрузки).
На фиг.1 показаны некоторые примеры форм возможных зон попадания согласно разным условиям сбрасывания и условиям попадания нагрузки.
Когда баллистическая нагрузка должна быть сброшена на цель, существует единственная точка сбрасывания, в которой, теоретически, она может поразить цель. На практике точка падения нагрузки на земле будет иметь распределение Гаусса около средней точки падения, которая исключительно редко совпадает с целью. Погрешность может быть обусловлена изменением в характеристиках нагрузки (вес, центр масс, моменты инерции) или ограничениями алгоритма сбрасывания (несмоделированными параметрами) или даже неточностями в оценке факторов окружающей среды (ветер, плотность воздуха и т.д.). В настоящее время существует несколько известных алгоритмов для вычисления или оценки зоны падения, которые используются авиационными компаниями для интеграции нагрузки с летательным аппаратом.
Для «интеллектуальной» нагрузки ситуация более сложна, поскольку эта нагрузка имеет способность перемещаться в необходимом направлении для достижения заданной цели с определенной степенью точности. Если известны положение сбрасывания, параметры полета летательного аппарата (например, скорость, ускорения, пространственное положение), условия попадания по цели и атмосферные условия, тогда необходимо определить, есть ли у нагрузки способность «направлять саму себя» на заданную цель.
Зона попадания на земле, в которой должна находиться заданная цель для ее успешного достижения нагрузкой, является по этой причине динамической зоной, которая изменяется, когда меняются известные условия.
Во время планирования на земле миссии, которая требует сбрасывания нагрузки, зона попадания может быть высчитана с использованием системы для имитации действия нагрузки, но для успеха миссии необходимо также иметь систему для оценки зоны попадания в полете, в которой учитывается то, что зона попадания может изменяться в ходе миссии.
Проблема оценки зоны попадания интеллектуальной нагрузки в реальном времени является сложной и весьма нелинейной, в зависимости от условий сбрасывания с летательного аппарата и условий попадания нагрузки по цели.
В наиболее высокоразвитых инструментах планирования на земле используются сложные модели, например, модели числовых вычислений с шестью степенями свободы для предсказания траектории нагрузки от точки сбрасывания до цели.
Модель с шестью степенями свободы выполнена с возможностью вычисления траектории нагрузки на основе параметров вращательного и поступательного движения нагрузки, параметров окружающей среды и модели управления полетом нагрузки. Сверх этого, модель усовершенствована с использованием данных, полученных испытаниями по сбросу нагрузки, чтобы сокращать погрешность прогнозирования относительно фактического события. Точность модели очень хороша, и возможная погрешность ограничена несколькими метрами.
Однако, так как эта модель интенсивно использует ресурсы системы обработки, которая управляет ее исполнением, она не может быть использована для приложений реального времени на борту летательного аппарата, например, во время миссии.
Для приложений, используемых в реальном времени, необходимо использовать параметрические модели, которые сопоставляют результаты модели с шестью степенями свободы с наименьшим возможным допустимым отклонением.
Другой недостаток известного уровня техники заключается в том, что модели с шестью степенями свободы вычисляют многоугольные зоны попадания, которые заданы существенно изменчивым количеством вершин.
Чтобы упростить инструмент имитации, с тем чтобы сделать его пригодным также для приложений реального времени, желательно привести возможные формы зон попадания к полигональным формам с неизменным и ограниченным количеством вершин.
Краткое изложение существа изобретения
Задача изобретения состоит в том, чтобы обеспечить способ и систему для оценки зоны попадания интеллектуальной (автоуправляемой) нагрузки, которые выполнены с возможностью выполнения и установки, соответственно, на борту летательного аппарата и для выполнения оценочных вычислений в реальном времени.
Объектами изобретения являются: система, имеющая признаки, определяемые в п.1, и способ, имеющий признаки, определяемые в п.8.
Конкретные варианты осуществления образуют объекты зависимых пунктов.
Дополнительным объектом изобретения является программа обработки или набор программ, как заявлено.
Подводя итог вышесказанному, объектами изобретения являются способ обработки и система для оценки на борту летательного аппарата в реальном времени зоны попадания интеллектуальной нагрузки и соответственного времени полета.
Способ осуществлен посредством машинной программы или набора программ или вычислительных процедур, составляющих программное приложение, которое может быть выполнено множеством обрабатывающих модулей сложной системы обработки, выполненной с возможностью обеспечения пилота и/или штурмана летательного аппарата, занятого в миссии, графическим представлением расчетной зоны попадания нагрузки на земле в реальном времени.
Среди возможных методик, которые могут быть использованы для разработки методологии для оценки в реальном времени зон попадания, которые включают в себя математические подходы, основывающиеся на линейных регрессиях, нелинейных регрессиях и нейронных сетях, настоящее изобретение интенсивно использует технику нейронных сетей, так что она может быть преимущественно осуществлена на неэкспериментальной летающей платформе. Из известных архитектур нейронных сетей, включающих: (GRNN) (нейронная сеть с ядерной регрессией Надарайя-Уотсона), рекуррентные и BPN (сеть с обратным распространением) архитектуры), архитектура нейронной сети, которая, считается, наилучшим образом аппроксимирует действие модели с шестью степенями свободы для оценки времени полета и зон попадания нагрузки, является архитектура сети с обратным распространением (BPN).
Задача вычисления времени полета и зон попадания преимущественно разделена на группу задач для вычисления времени полета и координат, относящихся к заданному количеству граничных точек (вершин) зоны попадания соответственно.
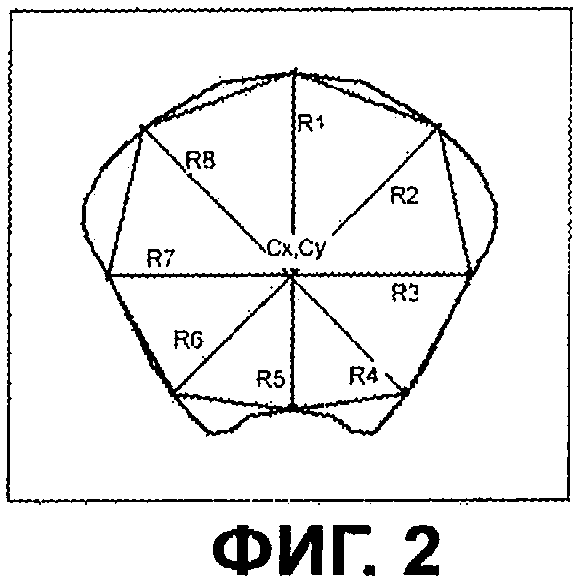
Были проведены испытания с различными типами моделирования зон попадания, которые могут сводить количество вершин зоны к 8, 10 или 12 вершинам, которые могут быть получены из точек пересечения соответствующего количества прямых линий, проходящих через точку центра масс зоны попадания, с границей зоны.
Было обнаружено, что моделирование с 8 точками при постоянных углах является наилучшим компромиссом между точностью модели и вычислительными требованиями.
На фиг.2 дан пример того, как зона попадания с 8 точками может быть представлена согласно координатам (Cx, Cy) точки центра масс и модулям радиусов R1-R8, а на фиг.3 показаны типичные формы зон попадания по фиг.1, смоделированные с восемью радиусами под постоянными углами.
Подобно известным моделям с шестью степенями свободы, система обработки согласно изобретению преимущественно выполнена с возможностью нахождения отличий между условиями, в которых разрешена зона попадания, и теми, в которых не разрешена зона попадания. Распознавание условий, в которых разрешена зона попадания, значительно улучшает работу системы, помогая добиваться заметного сокращения времени вычисления и использования вычислительных ресурсов, а также риска оценивания ложных зон попадания, и, следовательно, способствует увеличению условий использования нагрузки.
Функцией распознавания ограничивающих зон сброса нагрузки и попадания, которые допускают зону попадания, преимущественно управляют иным образом, чем в известных методиках оценки, в которых, поскольку они не могут выполнять такого распознавания, необходимо сокращать диапазоны параметров, вводимых в устройство оценки, на стадии проектирования, и в результате сокращать условия возможного сброса нагрузки и попадания.
Краткое описание чертежей
Дополнительные характеристики и преимущества изобретения будут описаны более подробно в нижеследующем подробном описании вариантов осуществления, которые даны в качестве неограничивающих примеров, со ссылками на прилагаемые чертежи, на которых:
на фиг.1 показан ряд разных возможных форм зон попадания;
фиг.2 - пример моделирования зоны попадания, имеющей восемь радиусов с постоянными углами;
фиг.3 - совокупность возможных форм зон попадания, смоделированных с восемью радиусами под постоянными углами, согласно изобретению;
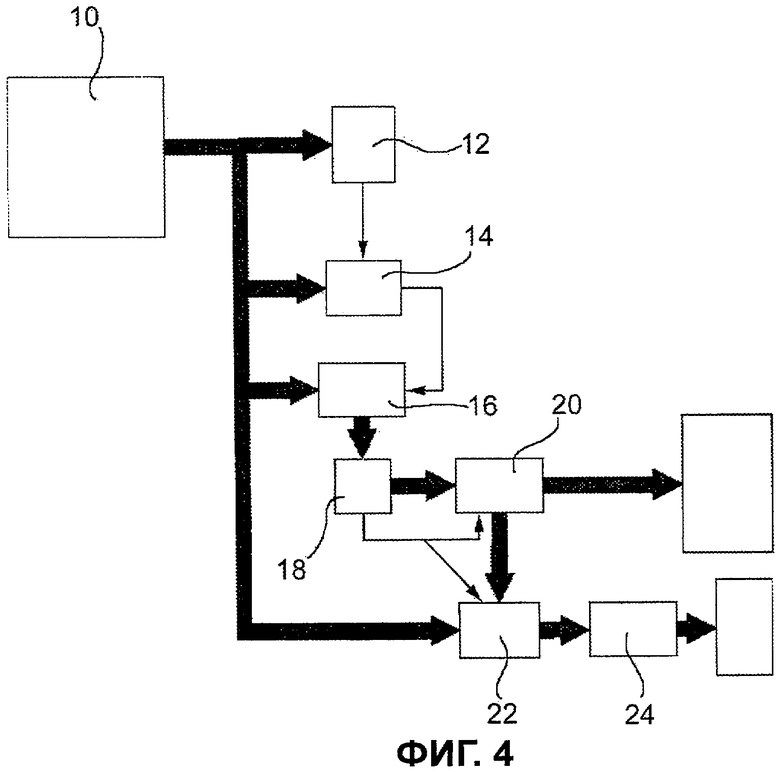
фиг.4 - блок-схема, представляющая систему обработки, согласно изобретению;
фиг.5 - изображение нейронной сети с обратным распространением с пятью слоями, на которой основаны модули обработки системы, согласно изобретению;
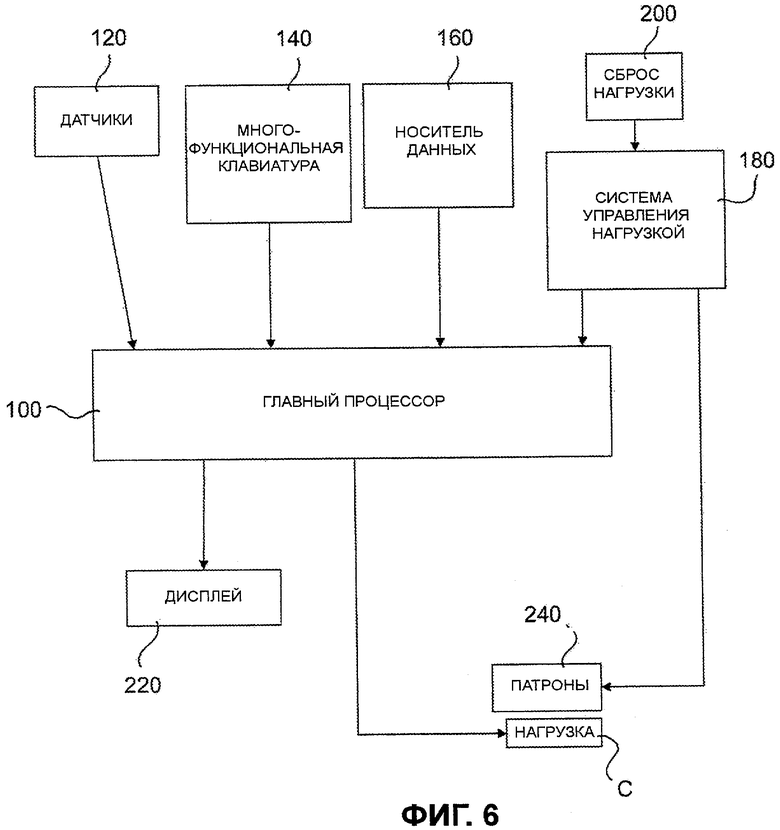
фиг.6 - блок-схема архитектуры системы обработки системы, согласно изобретению;
фиг.7 - ряд форм зон попадания, оцененных согласно известной модели с шестью степенями свободы, известной модели с восемью точками и модели, основанной на нейронных сетях, согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
Блок-схема системы обработки согласно изобретению показана на фиг.4.
Система содержит первый модуль 10 управления входящими параметрами, выполненный с возможностью приема данных или сигналов, указывающих на условия полета летательного аппарата, несущего нагрузку (например, информацию о высоте, скорости, угле подъема и направлении движения летательного аппарата), и условия попадания по цели (например, высота цели, угол атаки, азимут атаки).
С ним связано множество модулей 12, 14, 16, 18, 20, 22, 24 обработки.
Для проверки диапазонов входящих параметров и вычисления значений, которые должны быть поданы в качестве входящих данных к последующим оценочным модулям, предусмотрен вычислительный модуль 12 проверки входящего диапазона.
Модуль 12 соединен непосредственно с модулем 14 фильтрации, который также соединен с модулем 10 для приема входящих параметров и выполнен с возможностью оценки, существует ли зона попадания или нет.
Выход модуля 14 подается на активационный вход модуля 16 оценки зоны попадания, выполненного с возможностью приема на входе данных или сигналов, указывающих на условия полета летательного аппарата при сбросе нагрузки и условия попадания по цели, и выполнен с возможностью оценки координат центра масс зоны попадания и заданного количества (например, восьми в предпочтительном настоящем варианте осуществления) радиусов протяженности зоны попадания, простирающихся от центра масс.
Модуль 18 фильтрации зоны принимает на входе выходные данные модуля 16 и выполнен с возможностью вычисления площади поверхности оцененной зоны попадания, считая ее несуществующей, если она ниже заданного порога (например, одного квадратного километра). Если присутствует действительная зона попадания, модуль выполнен с возможностью вычисления расстояний между вершинами зоны и точкой сброса, которая будет использована в качестве исходной точки для последующих вычислений сокращения времени полета.
Модуль 20 уменьшения зоны попадания, приведение в действие которого управляется модулем 18 фильтрации, выполнен с возможностью приема на его входе результатов, полученных модулем 18, и уменьшения оценочной зоны попадания. Этот модуль преимущественно выполнен с возможностью уменьшения передних радиусов (по отношению к направлению движения летательного аппарата) зоны на первый коэффициент и задних радиусов зоны на второй коэффициент (например, 20% и 10% соответственно), чтобы быть более заниженными и принимать во внимание воздействие ветра и любых других условий полета и сброса, которые отличаются от номинальных условий. Модуль выполнен с возможностью вычисления координат вершин уменьшенной зоны попадания, которые образуют выходные данные системы оценки по изобретению. Модуль 20 также выполнен с возможностью вычисления новых расстояний между вершинами уменьшенной зоны попадания и точкой сброса нагрузки и выполнен с возможностью вывода этого результата для вычисления сокращения времени полета.
Модуль 22 вычисления времени полета, приведение в действие которого управляется модулем 18 фильтрации, выполнен с возможностью приема на его входе данных или сигналов, указывающих на условия полета летательного аппарата и условия попадания по цели, и выполнен с возможностью оценки времени полета нагрузки до вершин вычисленной зоны попадания.
Модуль 24 уменьшения времени полета выполнен с возможностью вычисления времени полета до вершин уменьшенной зоны попадания.
Из модуля 24 выводятся оценочное и сокращенное время полета для каждой вершины уменьшенной зоны попадания.
Набор данных координат центра масс и вершин уменьшенной зоны попадания и времени полета для каждой вершины зоны образует выходные данные системы оценки по изобретению и управляется модулем для представления информации пользователю, например, для дисплея, на бортовой экран, геометрического изображения зоны попадания, которое может преимущественно быть наложено на географическую карту пролетаемого района.
Устройством оценки зоны попадания и времени полета, описанным в настоящем изобретении, является система обработки на основе нейронных сетей, в которой информация, необходимая, чтобы определять зону попадания и соответственное время полета нагрузки, вычисляется нейронными сетями с обратным распространением, каждая из которых выполнена с возможностью вычисления конкретного элемента данных.
Нейронные сети - это нелинейные системы, которые могут изменять свое поведение в соответствии с входными данными, которые они принимают. Нейронная сеть - это набор параллельных процессоров, соединенных друг с другом в форме направленного графа, у которого есть возможность обучаться посредством подходящей тренировки.
В частности, в предпочтительном варианте осуществления система основана на контролируемых нейронных сетях, то есть, сетях, которые тренируют посредством примеров, каждый из которых описывает зону попадания (выходные данные) для заданного условия сброса и условия попадания нагрузки на земле (входные данные).
Преимущество техники нейронной сети заключается, вкратце, в способности сокращать время обработки и затраты, привносить передовые функциональные возможности, уменьшать расходы системы и увеличивать ее оперативную эффективность.
Для достижения хорошей производительности от нейронной сети необходимо определить архитектуру сети, которая наиболее подходит для представления проблемы. Это заключается в определении количества слоев сети, количества нейронов на скрытый слой, передаточных функций слоев и типа тренировки сети.
Основополагающим является создание файла тренировки, который достаточен для представления изучаемого явления. В действительности, набор данных тренировки должен быть полным, особенно, когда он крайне не линеен. Более того, набор тестовых данных для проверки производительности сети должен содержать в себе входные данные, отличные от тех, на которых была проведена тренировка сети.
При выборе архитектуры сети и набора данных тренировки необходимо помнить, что, хотя производительность нейронной сети может улучшаться, если вышеописанные факторы изменяются, необходимо избегать чрезмерного увеличения времени тренировки и времени отклика сети, которая создается. Окончательный выбор, поэтому, должен быть результатом компромисса этих двух аспектов в зависимости от применения доступных ресурсов аппаратного обеспечения и программного обеспечения.
Согласно изобретению предпочтительно использовать нейронные сети с обратным распространением с 3-5 слоями и с единственным выходом.
На фиг.5 показана в сжатой форме модель многослойной сети с обратным распространением с пятью слоями, такая, как используемая в модулях обработки системы согласно изобретению.
Подробно, система обработки для оценки зон попадания и времени полета нагрузки содержит три набора нейронных сетей типа BPN:
- первую группу нейронных сетей, выполненных с возможностью оценки, существует ли или нет зона попадания в соответствии с условиями полета летательного аппарата при сбросе нагрузки и условиями попадания нагрузки по цели; отсутствие существования зоны попадания показывает, что при конкретном условии полета при сбросе нагрузки не возможно удовлетворить требуемые условия попадания;
- вторую группу нейронных сетей для вычисления зоны попадания, содержащую множество сетей, выполненных с возможностью оценки координат центра масс зоны попадания и радиусов зоны соответственно;
- третью группу нейронных сетей для вычисления времени полета, содержащую множество сетей, выполненных с возможностью оценки времени полета до соответственной одной из вершин зоны попадания.
В частности, каждая из этих сетей содержит передаточные функции, обозначенные f1, f2, f3, f4, внутренних слоев, которые выбраны из группы, содержащей линейные, синусоидальные, гиперболического тангенса, гауссовы или комплементарные гауссовы передаточные функции.
Линейные передаточные функции используются для нормализации входных данных и денормализации выходных данных. Когда переменные загружены в нейронную сеть, они должны быть масштабированы к диапазону числовых значений, который нейронная сеть может эффективно обрабатывать. Есть два диапазона, с которыми сети обычно оперируют, то есть диапазон между 0 и 1 или диапазон между -1 и 1. Диапазоны могут быть двух типов, то есть «закрытым» диапазоном ([0, 1] или [-1, 1]), для которого значения строго включены в диапазон, или «открытым» диапазоном, для которого его значения могут быть больше чем или меньше, чем границы диапазона.
В конструкции нейронных сетей устройства оценки согласно изобретению преимущественно используется «открытый» диапазон.
Передаточная функция гиперболического тангенса - 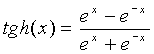 .
.
Гауссова передаточная функция -  , а комплементарная гауссова передаточная функция -
, а комплементарная гауссова передаточная функция -  .
.
В одном варианте осуществления нейронной сети передаточные функции, обозначенные f1, f2, f3, f4, - подряд, передаточная функция в виде гиперболического тангенса, гауссова передаточная функция, комплементарная гауссова передаточная функция и линейная передаточная функция, соответственно.
Система оценки зоны попадания и времени полета преимущественно сконструирована и встроена в главной системе обработки летательного аппарата, несущего нагрузку.
На фиг.6 показана архитектура системы, главным блоком которой является центральный процессор летательного аппарата.
Главный процессор, обозначенный 100, выполнен с возможностью выполнения функций навигации, управления процедурами атаки, инициализации нагрузки и вычисления внешних границ запуска (то есть оценки зон попадания), а также функций управления представлением информации пилоту и управления исполнением команд пилота.
С входом процессора 100 соединены множество датчиков 120 для сбора данных, указывающих на условия полета летательного аппарата и условия сброса нагрузки, интерфейс 140 многофункциональной клавиатуры, твердотельный носитель данных, или память 160, и система 180 управления нагрузкой.
Интерфейс 140 выполнен с возможностью, например, ввода и/или модификации координат цели, условий попадания по цели и курса летательного аппарата и данных выбора атаки.
Носитель 160 данных хранит координаты цели, условия попадания по цели и курс летательного аппарата, которые устанавливаются заранее во время подготовки миссии на земле и модифицируются во время работы для случайных целей.
Система 180 управления нагрузкой выполнена с возможностью идентификации и выбора нагрузки, разрешения сброса и управления очередностью и распределением по времени сбросов. С ней традиционно связана пусковая кнопка 200 сброса нагрузки.
Главный процессор 100 также соединен с экраном 220 для представления пилоту или штурману летательного аппарата данных по миссии и атаке.
Система 180 управления нагрузкой выполнена с возможностью приведения в действие картриджей 240 с нагрузкой посредством соответственного командного сигнала на сброс, а главный процессор выполнен с возможностью управления нагрузкой С путем передачи ей данных с координатами цели, данных по ориентации и сигналов приведения в действие.
В описании узел обработки, на котором основана система, был указан как микропроцессорный электронный блок обработки, снабженный, по меньшей мере, одним модулем хранения для хранения соответственных параметров обработки, но в этой связи обращается внимание на то, что для целей изобретения множество блоков обработки, соединенных параллельно, и модули хранения следует считать полностью эквивалентными.
Со ссылкой на фиг.7, показаны некоторые примеры сравнения зоны попадания, вычисленной традиционной моделью имитации с шестью степенями свободы (также показана с моделью с восемью точками) и моделью по изобретению.
Преимущественно система оценки в реальном времени, осуществленная на борту летательного аппарата, может вычислять зону попадания за время, на два порядка меньшее, чем требуется для автономного устройства имитации согласно известному уровню техники.
Результаты, полученные в отношении скорости вычисления и производительности системы и способа по изобретению, преимущественно подтверждают обоснованность предпринятого подхода и действенность техники нейронных сетей, а также архитектуры системы, сконструированной и описанной выше.
Естественно, принцип изобретения не изменяется, формы варианта осуществления и детали конструкции могут быть в значительной степени изменены касательно описанных и проиллюстрированных исключительно с целью неограничивающего примера, не выходя за пределы объема защиты настоящего изобретения, заданного прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ всеракурсного распознавания в радиолокационной станции типового состава групповой воздушной цели при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети | 2023 |
|
RU2816189C1 |
| АВИАЦИОННАЯ СИСТЕМА ОБРАБОТКИ ДАННЫХ АЭРОСЪЕМКИ ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ЗОН И УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ЦЕЛЕВЫХ НАГРУЗОК БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2840814C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ОШИБОЧНЫХ ИЗМЕРЕНИЙ ДАВЛЕНИЯ В СИСТЕМЕ ВОЗДУШНЫХ СИГНАЛОВ С НЕВЫСТУПАЮЩИМИ ПРИЕМНИКАМИ ДАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ЭПЮР ДАВЛЕНИЙ МЕЖДУ СОСЕДНИМИ ОТВЕРСТИЯМИ ДЛЯ ОТБОРА ДАВЛЕНИЯ | 2019 |
|
RU2771090C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| Способ определения параметров лесного массива | 2024 |
|
RU2828596C1 |
| СИСТЕМА И СПОСОБ ПОЗИЦИОНИРОВАНИЯ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЕГО ДВИЖЕНИИ ПО РУЛЕЖНОЙ ДОРОЖКЕ | 2019 |
|
RU2753004C2 |


Изобретение относится к области авиационного приборостроения и может найти применение в бортовых системах контроля и управления боевой нагрузки летательных аппаратов (ЛА). Технический результат - расширение функциональных возможностей управления интеллектуальной нагрузкой. Для этого для оценки зоны поражения баллистической или интеллектуальной (автоуправляемой) нагрузки ЛА система содержит узел обработки, средство сбора первых данных или сигналов, указывающих на условия полета летательного аппарата при сбросе нагрузки; и средство обработки, включающее в себя множество нейронных сетей, для оценки целевой точки попадания нагрузки. При этом узел обработки дополнительно содержит средство сбора вторых данных или сигналов, указывающих на заданные условия попадания по цели, средство обработки выполнено с возможностью определения полигональной зоны попадания как функции от первых и вторых данных или сигналов, а средство обработки включает в себя множество первых нейронных сетей, выполненных с возможностью вычисления координат центральной точки зоны попадания и заданного количества вершин зоны попадания. 3 н. и 12 з.п. ф-лы, 7 ил.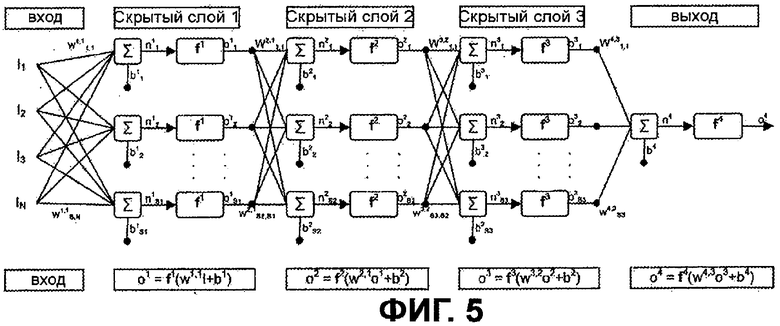
1. Система для оценки зоны попадания интеллектуальной (автоуправляемой) нагрузки, которая может быть запущена с летательного аппарата, содержащая узел обработки, включающий в себя:
средство сбора первых данных или сигналов, указывающих на условия полета летательного аппарата при сбросе нагрузки; и
средство обработки, включающее в себя множество нейронных сетей, для оценки целевой точки попадания нагрузки, отличающееся тем, что упомянутый узел обработки дополнительно содержит средство сбора вторых данных или сигналов, указывающих на заданные условия попадания по цели,
при этом средство обработки выполнено с возможностью определения полигональной зоны попадания как функции от первых и вторых данных или сигналов, при этом упомянутое средство обработки включает в себя множество первых нейронных сетей, выполненных с возможностью вычисления координат центральной точки зоны попадания и заданного количества вершин зоны соответственно.
2. Система по п.1, в которой первые нейронные сети выполнены с возможностью вычисления радиусов, которые проходят от центральной точки зоны попадания, и которые выполнены с возможностью задания определенного количества вершин.
3. Система по п.1, в которой средство обработки включает в себя множество вторых нейронных сетей, которые выполнены с возможностью вычисления времени полета до вершин зоны попадания.
4. Система по п.1, в которой средство обработки для определения зоны попадания включает в себя множество третьих нейронных сетей, которые выполнены с возможностью оценки существования зоны как функции от первых и вторых данных или сигналов, указывающих на полетные условия летательного аппарата при сбросе нагрузки и заданные условия попадания по цели.
5. Система по п.4, в которой первые, вторые и третьи нейронные сети являются нейронными сетями с обратным распространением с 3-5 слоями и содержат передаточные функции между слоями, которые выбраны из группы, содержащей линейные, синусоидальные, гиперболического тангенса, гауссовы и комплементарные гауссовы передаточные функции.
6. Система по п.5, в которой первые, вторые и третьи нейронные сети содержат 5-слойные нейронные сети с обратным распространением с 3-мя скрытыми слоями, имеющими передаточную функцию в виде гиперболического тангенса первого скрытого слоя, гауссову передаточную функцию второго скрытого слоя, комплементарную гауссову передаточную функцию третьего скрытого слоя и линейную выходную передаточную функцию соответственно.
7. Система по п.2, в которой средство обработки выполнено с возможностью уменьшения величины радиусов зоны попадания, в частности, вследствие применения первого коэффициента для уменьшения передних радиусов зоны попадания относительно направления движения летательного аппарата, и вследствие применения второго коэффициента для уменьшения задних радиусов зоны попадания, вычисления координат заданного количества вершин уменьшенной зоны попадания и вычисления времени полетов нагрузки до вершин уменьшенной зоны попадания.
8. Способ оценки зоны попадания интеллектуальной (автоуправляемой) нагрузки, которая может быть запущена с летательного аппарата, причем способ выполнен с возможностью осуществления посредством электронного узла обработки, содержащего средство для определения полигональной зоны попадания, задаваемой координатами центральной точки и заданным количеством вершин, как функции от первых и вторых данных или сигналов, указывающих на условия полета летательного аппарата при сбросе нагрузки и заданные условия попадания по цели соответственно,
при этом средство включает в себя множество первых нейронных сетей, выполненных с возможностью вычисления координат центральной точки зоны попадания и заданного количества вершин зоны соответственно, при этом способ содержит:
этап обучения, на котором узел обработки принимает первые и вторые данные или сигналы тренировки, указывающие на условия полета летательного аппарата при сбросе нагрузки и заданные условия попадания по цели соответственно, а также связанные выходные данные тренировки, указывающие на координаты зоны попадания, и определяет передаточные функции между слоями первых нейронных сетей как функцию от входных и выходных данных тренировки; и
этап выполнения, на котором узел обработки принимает в качестве входных данных первые и вторые данные или сигналы измерений и вычисляет оценку зоны попадания в результате применения передаточных функций.
9. Способ по п.8, в котором первые нейронные сети выполнены с возможностью вычисления радиусов, которые проходят от центральной точки зоны попадания, и которые выполнены с возможностью задания определенного количества вершин.
10. Способ по п.8, в котором средство включает в себя множество вторых нейронных сетей, выполненных с возможностью вычисления времени полета до вершин зоны попадания соответственно, при этом способ содержит:
этап обучения, на котором узел обработки принимает первые входные данные или сигналы тренировки, указывающие на условия полета летательного аппарата при сбросе нагрузки, и вторые входные данные или сигналы тренировки, указывающие на заданные условия попадания по цели, а также связанные выходные данные тренировки, указывающие на время полета до вершин зоны попадания, и определяет передаточные функции между слоями вторых нейронных сетей как функцию от входных и выходных данных тренировки; и
этап выполнения, на котором узел обработки принимает в качестве входных данных первые и вторые данные или сигналы измерений и вычисляет оценку времени полета до вершин зоны попадания в результате применения передаточных функций.
11. Способ по п.8, в котором средство включает в себя множество третьих нейронных сетей, выполненных с возможностью оценки наличия зоны попадания соответственно, при этом способ содержит:
этап обучения, на котором узел обработки принимает первые входные данные или сигналы тренировки, указывающие на условия полета летательного аппарата при сбросе нагрузки, и вторые входные данные или сигналы тренировки, указывающие на заданные условия попадания по цели, а также связанные выходные данные тренировки, указывающие на существование зоны попадания, и определяет передаточные функции между слоями третьих нейронных сетей как функцию от входных и выходных данных тренировки; и
этап выполнения, на котором узел обработки принимает в качестве входных данных первые и вторые данные или сигналы измерений и вычисляет наличие или отсутствие зоны попадания в результате применения передаточных функций.
12. Способ по п.8, в котором первые, вторые и третьи нейронные сети являются нейронными сетями с обратным распространением с 3-5 слоями и содержат передаточные функции между слоями, которые выбирают из группы, содержащей линейные, синусоидальные, гиперболического тангенса, гауссовы и комплементарные гауссовы передаточные функции.
13. Способ по п.12, в котором первые, вторые и третьи нейронные сети содержат 5-слойные нейронные сети с обратным распространением с 3-мя скрытыми слоями, имеющими передаточную функцию в виде гиперболического тангенса первого скрытого слоя, гауссову передаточную функцию второго скрытого слоя, комплементарную гауссову передаточную функцию третьего скрытого слоя и линейную выходную передаточную функцию соответственно.
14. Способ по п.9, содержащий уменьшение величины радиусов зоны попадания, вычисление координат заданного количества вершин уменьшенной зоны попадания и вычисление времени полетов нагрузки до вершин уменьшенной зоны попадания, где уменьшение величины радиусов зоны попадания включает в себя применение первого коэффициента уменьшения к передним радиусам зоны попадания относительно направления движения летательного аппарата и применение второго коэффициента уменьшения к задним радиусам зоны попадания.
15. Машиночитаемый носитель, содержащий один или более модулей с кодом для осуществления нейронных сетей системы для оценки зоны попадания интеллектуальной нагрузки, по пп.1-7.
| US 6254031 B1, 03.07.2001 | |||
| Вибрационный сепаратор для очистки от пустой породы антрацита и других сортов каменного угля | 1930 |
|
SU36362A1 |
| Щит термоактивной опалубки | 1974 |
|
SU482427A1 |
| US 6629085 B1, 30.09.2003 | |||
| Печь кипящего слоя | 1987 |
|
SU1455199A1 |
| US 6882992 B1, 19.04.2005. | |||

