Изобретение относится к области радиолокации и может быть использовано для всеракурсного распознавания в импульсно-доплеровской радиолокационной станции (РЛС) типового состава групповой воздушной цели (ГВЦ) при различных условиях полета и воздействии уводящих по скорости (доплеровской частоте) помех на основе калмановской фильтрации и нейронной сети.
Известен способ распознавания типа самолета из класса «самолет с турбореактивным двигателем (ТРД)» в импульсно-доплеровской РЛС, заключающийся в том, что радиолокационный (РЛ) сигнал, отраженный от самолета с ТРД, с выхода приемника РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье (БПФ) и преобразуется в амплитудно-частотный спектр (АЧС), спектральные составляющие которого обусловлены отражениями сигнала от планера самолета с ТРД и вращающихся лопаток рабочего колеса первой ступени компрессора низкого давления (КНД) его двигателя, определяется отсчет доплеровской частоты в АЧС с максимальной амплитудой спектральной составляющей спектра сигнала, соответствующего его отражениям от планера самолета с ТРД, который поступает на вход первого фильтра сопровождения, определяется отсчет доплеровской частоты в АЧС, соответствующий максимальной амплитуде спектральной составляющей спектра сигнала, находящийся справа по доплеровской частоте относительно спектральной составляющей сигнала, отраженного от планера самолета, который поступает на вход второго фильтра сопровождения первой компрессорной составляющей спектра сигнала, обусловленной его отражениями от вращающихся лопаток первой ступени рабочего колеса КНД, на каждом k-ом такте работы обоих оптимальных фильтров сопровождения определяется оценка разности между оцененными значениями доплеровских частот, обусловленных отражениями РЛ сигнала от планера и вращающихся лопаток рабочего колеса первой ступени КНД двигателя самолета, которая соответствует только одному типу самолета с ТРД, при этом весь диапазон возможных значений разностей оценок доплеровских часто априорно разбивается на несколько неперекрывающихся друг с другом поддиапазонов, каждый из которых соответствует определенному типу самолета с ТРД, за конечное количество тактов работы обоих фильтров сопровождения вычисляется вероятность попадания величины разности оценок доплеровских частот в каждый из априорно сформированный поддиапазон, определяется номер поддиапазона, для которого величина вероятности максимальна, ее значение сравнивается с пороговым значением вероятности распознавания типа самолета с ТРД, при превышении порога принимается решение о распознавании типа самолета с ТРД с вероятностью, не ниже заданной, в противном случае принимается решение о невозможности распознавания типа самолета с заданной вероятностью [1].
Недостатком данного способа является невозможность с помощью его распознать типовой состав ГВЦ при различных ракурсах ее РЛ наблюдения (поскольку РЛ сигналы, отраженные от вращающихся лопаток первой ступени КНД, имеют существенную ракурсную зависимость), условиях полета и воздействии уводящих по скорости помех.
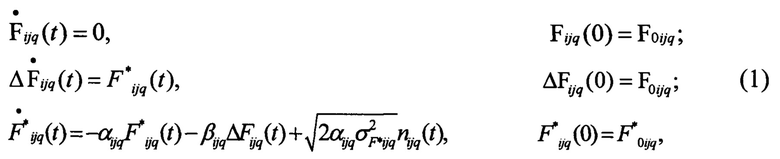
Известен способ распознавания типового состава ГВЦ различных классов при различных условиях полета на основе калмановской фильтрации и нейронной сети, заключающийся в том, что РЛ сигнал, отраженный от группы летательных аппаратов (ЛА), с выхода приемника импульсно- доплеровской РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в АЧС, спектральные составляющие которого обусловлены отражениями сигнала от планеров ЛА, путем пороговой обработки АЧС сигнала формируют только те отсчеты Fijq (где i=1,…, I; I - количество ЛА в группе; j=1,…, J; J - количество типов ЛА различного класса; q=1,…Q; Q - количество условий полета ЛА), доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, в соответствии с i j q-ми динамическими моделями доплеровских частот

где Fijq и ΔFkijq - соответственно детерминированная и флюктуационная составляющая доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
F*ijq(t) - производная доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
αijq - величина, обратно пропорциональная времени корреляции доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
βijq - квадрат собственной частоты автокорреляционной функции доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
 - дисперсия производной доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
- дисперсия производной доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
nijq - взаимонезависимые формирующие «белые» гауссовские шумы с нулевыми математическими ожиданиями и единичными интенсивностями для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета; формируются последовательно в дискретном времени доплеровские частоты в виде

где k=1,…, К - текущий такт формирования доплеровских частот;
К - общее количество тактов формирования доплеровских частот;
Т - значение временного дискрета, по которым за К тактов осуществляется вычисление значений соответствующей ijq-ой автокорреляционной функции (АКФ) и по ней - соответствующее значение  дисперсии производной доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета в соответствии с выражением
дисперсии производной доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета в соответствии с выражением

где  - дисперсия флюктуаций доплеровской частоты для каждого i-го ЛА, имеющего j-й тип с q-ми условиями полета,
- дисперсия флюктуаций доплеровской частоты для каждого i-го ЛА, имеющего j-й тип с q-ми условиями полета,
вычисленные значения дисперсий  через первый коммутатор по команде «Обучение» поступают на соответствующие ijq-е входы нейронной сети для ее предварительного обучения для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, от которых заранее были получены и обработаны реальные РЛ сигналы, при этом архитектура нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из трех слоев: первого входного слоя нейронной сети, на ijq-е входы которой последовательно подают оценки
через первый коммутатор по команде «Обучение» поступают на соответствующие ijq-е входы нейронной сети для ее предварительного обучения для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, от которых заранее были получены и обработаны реальные РЛ сигналы, при этом архитектура нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из трех слоев: первого входного слоя нейронной сети, на ijq-е входы которой последовательно подают оценки  дисперсии производной доплеровской частоты с выхода соответствующего ijq-го калмановского фильтра; второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации; третьего выходного слоя сети, на ijq-х выходах которого формируются оценки Pijq вероятностей предварительного распознавания i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, в процессе распознавания типового состава ГВЦ по РЛ, отраженному от ее элементов, с помощью каждого ijq-го калмановского фильтра, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями
дисперсии производной доплеровской частоты с выхода соответствующего ijq-го калмановского фильтра; второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации; третьего выходного слоя сети, на ijq-х выходах которого формируются оценки Pijq вероятностей предварительного распознавания i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, в процессе распознавания типового состава ГВЦ по РЛ, отраженному от ее элементов, с помощью каждого ijq-го калмановского фильтра, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями
где  и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно, размерности nxn, n - размерность вектора Х(k+1) состояния;
и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно, размерности nxn, n - размерность вектора Х(k+1) состояния;
Ф(k) - переходная матрица состояния размерности nxn;
G(k) и R(k) - ковариационные матрицы шумов возбуждения и наблюдения размерности nxn и mxm соответственно, m - размерность вектора Y(k+1) наблюдения;
ϒ(k) - вектор-столбец шумов наблюдения, представляющие собой гауссовские «белые» последовательности с нулевыми математическими ожиданиями и матрицами спектральных плотностей Nϒ(k) размерности m;
Н(k) - матрица наблюдения размерности mxn;
Z(k+1) - матрица невязок измерения размерности m;
S(k+1) - матрица весовых коэффициентов размерности nxm;
I - единичная матрица размерности nxn;
«т» - символ транспонирования;
«-1» - символ нахождения обратной матрицы;
 - символ нахождения оценки,
- символ нахождения оценки,
с соответствующей динамической моделью (1), осуществляется фильтрация отсчетов доплеровских частот, в результате чего на выходе каждого ijq-го калмановского фильтра формируется соответствующая оценка  доплеровской частоты, по которой вычисляется соответствующая оценка АКФ и по ней в соответствии с выражением
доплеровской частоты, по которой вычисляется соответствующая оценка АКФ и по ней в соответствии с выражением

где  - оценка дисперсии оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
- оценка дисперсии оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
 - оценка величины, обратно пропорциональной времени корреляции оценки доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
- оценка величины, обратно пропорциональной времени корреляции оценки доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
 - оценка квадрата собственной частоты АКФ оценки доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета
- оценка квадрата собственной частоты АКФ оценки доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета
вычисляется оценка  дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, которая поступает на соответствующий вход нейронной сети для принятия за К тактов работы всех калмановских фильтров предварительного решения о наличии в группе i-го ЛА группы, имеющего j-й тип с q-ми условиями полета с соответствующей вероятностью Pijq, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pijq≥Рпор принимается окончательное решение о том, что i-й ЛА в группе имеет j-й тип с q-ми условиями полета, в противном случае принимается решение об отсутствии данного типа Л А в группе.
дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, которая поступает на соответствующий вход нейронной сети для принятия за К тактов работы всех калмановских фильтров предварительного решения о наличии в группе i-го ЛА группы, имеющего j-й тип с q-ми условиями полета с соответствующей вероятностью Pijq, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pijq≥Рпор принимается окончательное решение о том, что i-й ЛА в группе имеет j-й тип с q-ми условиями полета, в противном случае принимается решение об отсутствии данного типа Л А в группе.
Недостатком данного способа является невозможность с помощью его распознать типовой состав ГВЦ при различных ракурсах ее РЛ наблюдения, условиях полета и воздействии уводящих по скорости помех.
Это обусловлено тем, что воздействие уводящих по скорости помех приводит к неверной вычисленной в соответствии с (11) оценки  дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, вследствие чего, тип ЛА из состава их группы будет распознан ошибочно.
дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, вследствие чего, тип ЛА из состава их группы будет распознан ошибочно.
Цель изобретения - распознать в импульсно-доплеровской радиолокационной станции с вероятностью, не ниже заданной, типовой состав групповой воздушной цели при различных ракурсах ее радиолокационного наблюдения, условиях полета и воздействии уводящих по скорости помех.
С этой целью в способе всеракурсного распознавания в РЛС типового состава ГВЦ при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети, РЛ сигнал, отраженный от группы ЛА, с выхода приемника импульсно-доплеровской РЛС на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в АЧС, спектральные составляющие которого обусловлены отражениями сигнала от планеров ЛА, путем пороговой обработки АЧС сигнала формируют только те отсчеты Fijq (где i=1,…, I; I - количество ЛА в группе; j=1,…, J; J - количество типов ЛА; q=1,…Q; Q - количество условий полета ЛА) доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, в соответствии с ijq-ми динамическими моделями доплеровских частот (1) формируются последовательно в дискретном времени доплеровские частоты в виде (2), по которым за К тактов осуществляется вычисление значений соответствующей ijq-ой АКФ и по ней в соответствии с выражением (3) - соответствующее значение  дисперсии производной доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, вычисленные значения дисперсий
дисперсии производной доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, вычисленные значения дисперсий  поступают на соответствующие ijq- входы нейронной сети для предварительного ее обучения для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, от которых заранее были получены и обработаны реальные РЛ сигналы, при этом архитектура нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из трех слоев: первого входного слоя нейронной сети, на ijq-е входы которой последовательно подают оценки
поступают на соответствующие ijq- входы нейронной сети для предварительного ее обучения для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, от которых заранее были получены и обработаны реальные РЛ сигналы, при этом архитектура нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из трех слоев: первого входного слоя нейронной сети, на ijq-е входы которой последовательно подают оценки  , дисперсии производной доплеровской частоты с выхода соответствующего ijq-го калмановского фильтра из состава их первой группы, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями (4)-(10), и с соответствующей динамической моделью (1); второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации; третьего выходного слоя сети, на ijq-х выходах которого формируются оценки Pijq вероятностей предварительного распознавания i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pijq≥Рпор принимается окончательное решение о том, что i-й ЛА в группе имеет j-й тип с q-ми условиями полета, в противном случае принимается решение об отсутствии данного типа летательного аппарата в группе, осуществляется фильтрация ijq- отсчетов доплеровских частот соответственно в ijq-х калмановских фильтрах из состава их первой группы с соответствующей ijq-й динамической моделью (1), в результате чего на выходе каждого ijq-го калмановского фильтра из состава их первой группы формируется соответствующая оценка
, дисперсии производной доплеровской частоты с выхода соответствующего ijq-го калмановского фильтра из состава их первой группы, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями (4)-(10), и с соответствующей динамической моделью (1); второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации; третьего выходного слоя сети, на ijq-х выходах которого формируются оценки Pijq вероятностей предварительного распознавания i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pijq≥Рпор принимается окончательное решение о том, что i-й ЛА в группе имеет j-й тип с q-ми условиями полета, в противном случае принимается решение об отсутствии данного типа летательного аппарата в группе, осуществляется фильтрация ijq- отсчетов доплеровских частот соответственно в ijq-х калмановских фильтрах из состава их первой группы с соответствующей ijq-й динамической моделью (1), в результате чего на выходе каждого ijq-го калмановского фильтра из состава их первой группы формируется соответствующая оценка  доплеровской частоты, по которой вычисляется соответствующая оценка АКФ и по ней, в соответствии с выражением (11), вычисляется оценка
доплеровской частоты, по которой вычисляется соответствующая оценка АКФ и по ней, в соответствии с выражением (11), вычисляется оценка  дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, дополнительно одновременно осуществляется фильтрация ijq-х отсчетов доплеровских частот в iwr-х калмановских фильтрах из состава их второй группы с соответствующей iwr-й динамической моделью (где w=1,…, W - количество законов изменения уводящих по скорости помех, r=1,…, R, R - количество вариантов параметров закона изменения уводящих по скорости помех), на выходе каждого ijq-го калмановского фильтра из состава их первой группы наряду с оценкой
дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, дополнительно одновременно осуществляется фильтрация ijq-х отсчетов доплеровских частот в iwr-х калмановских фильтрах из состава их второй группы с соответствующей iwr-й динамической моделью (где w=1,…, W - количество законов изменения уводящих по скорости помех, r=1,…, R, R - количество вариантов параметров закона изменения уводящих по скорости помех), на выходе каждого ijq-го калмановского фильтра из состава их первой группы наряду с оценкой  доплеровской частоты вычисляется соответствующая дисперсия Dijq(k+1) ошибки фильтрации, в соответствии с выражением
доплеровской частоты вычисляется соответствующая дисперсия Dijq(k+1) ошибки фильтрации, в соответствии с выражением

а на выходе каждого iwr-го калмановского фильтра из состава их второй группы формируется соответствующая оценка  доплеровской частоты с соответствующей дисперсией Djwr(k+l) ошибки фильтрации, определяемой выражением
доплеровской частоты с соответствующей дисперсией Djwr(k+l) ошибки фильтрации, определяемой выражением 
осуществляется сравнение величин вычисленных дисперсий ошибок фильтрации, при выполнении условия

принимается решение о том, что оценка  на выходе ijq-го калмановского фильтра из состава их первой группы обусловлена отражениями РЛ от i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, при выполнении условия
на выходе ijq-го калмановского фильтра из состава их первой группы обусловлена отражениями РЛ от i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, при выполнении условия
 )
)
принимается решение о том, что оценка  на выходе iwr-го калмановского фильтра из состава их второй группы обусловлена воздействием уводящей по w-му закону с r-ым вариантом параметров уводящей по скорости помехи и вычисление АКФ по данной оценке с последующим вычислением оценки
на выходе iwr-го калмановского фильтра из состава их второй группы обусловлена воздействием уводящей по w-му закону с r-ым вариантом параметров уводящей по скорости помехи и вычисление АКФ по данной оценке с последующим вычислением оценки  дисперсии производной оценки флюктуаций доплеровской частоты не производится.
дисперсии производной оценки флюктуаций доплеровской частоты не производится.
Использование оценки  дисперсии оценки производной флюктуаций оценки доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, вычисляемой (выражение (11)) по параметрам соответствующей АКФ, в качестве признака всеракурсного распознавания типа ЛА различного класса с соответствующими условиями его полета и находящегося в составе их группы, обусловлена следующими факторами.
дисперсии оценки производной флюктуаций оценки доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, вычисляемой (выражение (11)) по параметрам соответствующей АКФ, в качестве признака всеракурсного распознавания типа ЛА различного класса с соответствующими условиями его полета и находящегося в составе их группы, обусловлена следующими факторами.
В соответствии с [3], справедливы несколько иные формульные зависимости коэффициентов, входящих в динамическую модель (1). Так, согласно [3]:



где, в данном случае, bijq=Vijq / L;
Vijq - воздушная скорость i-го ЛА группы, имеющего j-й тип с q-ми условиями полета;
L - масштаб турбулентности атмосферы, одинаковый для всех ЛА группы;
γijq - параметр, зависящий от j-го типа ЛА с q-ми условиями полета;
 - дисперсия флюктуации доплеровской частоты, обусловленная флюктуациями скорости ветра для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета.
- дисперсия флюктуации доплеровской частоты, обусловленная флюктуациями скорости ветра для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета.
Из выражений (15) и (18) можно заключить, что в таком параметре, как  , который, в первом случае, связывает траекторные статистические характеристики планерной составляющей спектра РЛ сигнала, отраженного каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета
, который, в первом случае, связывает траекторные статистические характеристики планерной составляющей спектра РЛ сигнала, отраженного каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета  , полученные на основе оценок соответствующих АКФ, а во втором случае - параметры, зависящие от типа ЛА и условий его полета (γijq), масштаба турбулентности атмосферы (L), дисперсии флюктуаций доплеровской частоты, обусловленной флюктуациями скорости ветра
, полученные на основе оценок соответствующих АКФ, а во втором случае - параметры, зависящие от типа ЛА и условий его полета (γijq), масштаба турбулентности атмосферы (L), дисперсии флюктуаций доплеровской частоты, обусловленной флюктуациями скорости ветра  , содержится информация о типе ЛА. Следовательно, по оценкам статистических характеристик
, содержится информация о типе ЛА. Следовательно, по оценкам статистических характеристик  вычисленных на основе соответствующих оценок АКФ оценок доплеровских частот, формируемых на выходах всех ijq-ых калмановских фильтров из состава их первой группы, появляется возможность только по оценке доплеровской частоты планерной составляющей спектра сигнала распознать j-й тип с q-ми условиями полета каждого i-го ЛА группы.
вычисленных на основе соответствующих оценок АКФ оценок доплеровских частот, формируемых на выходах всех ijq-ых калмановских фильтров из состава их первой группы, появляется возможность только по оценке доплеровской частоты планерной составляющей спектра сигнала распознать j-й тип с q-ми условиями полета каждого i-го ЛА группы.
Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Одновременная фильтрация ijq-х отсчетов доплеровских частот соответственно в ijq-х калмановских фильтрах из состава их первой группы с соответствующей ijq-й динамической моделью (1) и iwr-х калмановских фильтрах из состава их второй группы с соответствующей iwr-й динамической моделью, в результате чего на выходе каждого ijq-го калмановского фильтра из состава их первой группы формируется соответствующая оценка  доплеровской частоты с соответствующей дисперсией Dijq(k+1) ошибки фильтрации, определяемой выражением (12), а на выходе каждого iwr-го калмановского фильтра из состава их второй группы формируется соответствующая оценка
доплеровской частоты с соответствующей дисперсией Dijq(k+1) ошибки фильтрации, определяемой выражением (12), а на выходе каждого iwr-го калмановского фильтра из состава их второй группы формируется соответствующая оценка  доплеровской частоты с соответствующей дисперсией Djwr(k+1) ошибки фильтрации, определяемой выражением (13).
доплеровской частоты с соответствующей дисперсией Djwr(k+1) ошибки фильтрации, определяемой выражением (13).
2. Принятие решения при выполнении условия (14) о том, что оценка  на выходе ijq - го калмановского фильтра из состава их первой группы обусловлена отражениями РЛ сигнала от i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, и по данной оценке вычисляется соответствующая оценка АКФ и по ней, в соответствии с выражением (11), вычисляется оценка
на выходе ijq - го калмановского фильтра из состава их первой группы обусловлена отражениями РЛ сигнала от i-го ЛА группы, имеющего j-й тип с q-ми условиями полета, и по данной оценке вычисляется соответствующая оценка АКФ и по ней, в соответствии с выражением (11), вычисляется оценка  дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета.
дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета.
3. Принятие решения при выполнении условия (15) о том, что оценка  на выходе iwr-го калмановского фильтра из состава их второй группы обусловлена воздействием уводящей по w-му закону с r-ым вариантом параметров уводящей по скорости помехи и вычисление АКФ по данной оценке с последующим вычислением оценки
на выходе iwr-го калмановского фильтра из состава их второй группы обусловлена воздействием уводящей по w-му закону с r-ым вариантом параметров уводящей по скорости помехи и вычисление АКФ по данной оценке с последующим вычислением оценки  дисперсии производной оценки флюктуаций доплеровской частоты не производится.
дисперсии производной оценки флюктуаций доплеровской частоты не производится.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков в совокупности с известными позволит распознать в импульсно-доплеровской РЛС с вероятностью, не ниже заданной, типовой состав ГВЦ при различном ракурсе ее РЛ наблюдения, различных условиях полета и воздействии уводящих по скорости помех.
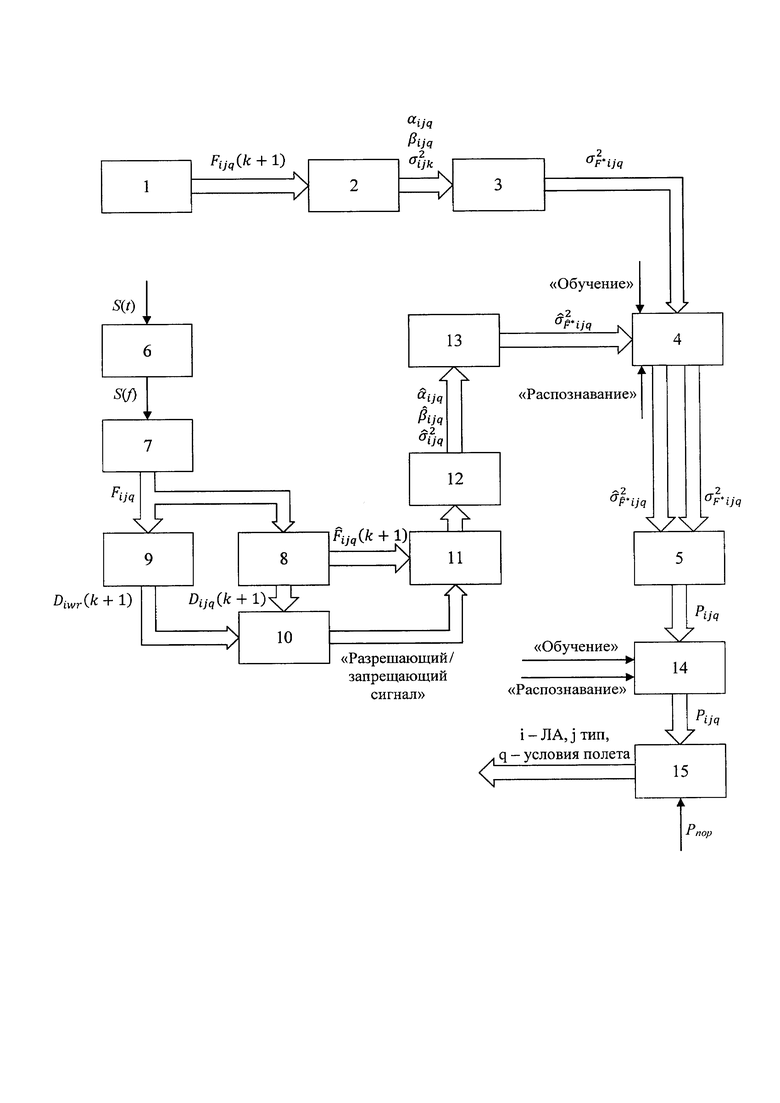
На фигуре приведена блок-схема, поясняющая предлагаемый способ всеракурсного распознавания в РЛС типового состава ГВЦ при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети.
Предлагаемый способ осуществляется следующим образом (фигура).
В первом блоке 1 формирования отсчетов доплеровских частот в соответствии с ijq-ми динамическими моделями вида (1) формируются последовательно в дискретном времени доплеровские частоты вида (2), по которым за К тактов в первом вычислителе 2 осуществляется вычисление значений соответствующей ijq-ой АКФ и ее параметров  , по которым во втором вычислителе 3 осуществляется вычисление соответствующего значения
, по которым во втором вычислителе 3 осуществляется вычисление соответствующего значения  дисперсии производной флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета в соответствии с выражением (3).
дисперсии производной флюктуаций доплеровской частоты для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета в соответствии с выражением (3).
Вычисленное значение дисперсии  через первый коммутатор 4 по команде «Обучение» поступает на соответствующий ijq-ый вход нейронной сети 5 для ее предварительного обучения для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета.
через первый коммутатор 4 по команде «Обучение» поступает на соответствующий ijq-ый вход нейронной сети 5 для ее предварительного обучения для каждого i-го ЛА группы, имеющего j-й тип с q-ми условиями полета.
При всеракурсном распознавании типового состава ГВЦ при различных условиях полета и воздействии уводящих по скорости помех, РЛ сигнал, отраженный от группы ЛА, с выхода приемника импульсно-доплеровской РЛС на промежуточной частоте в блоке 6 БПФ подвергается узкополосной доплеровской фильтрации на основе процедуры БПФ и преобразуется в АЧС, спектральные составляющие которого обусловлены отражениями сигнала от планеров ЛА.
Во втором блоке 7 формирования отсчетов доплеровских частот путем пороговой обработки АЧС сигнала формируются только те отсчеты Fijq доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог. Сформированные отсчеты Fijq доплеровских частот поступают одновременно на входы соответствующих ijq-ых калмановских фильтров из состава их первого блока 8 с соответствующей ijq-й динамической моделью (1) и iwr-x калмановских фильтров из состава их второго блока 9 с соответствующей iwr-й динамической моделью, функционирующих в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями (4)-(10).
На выходе каждого ijq-го калмановского фильтра из состава их первого блока 8 формируется соответствующая оценка  доплеровской частоты с соответствующей дисперсией Dijq(k+1) ошибки фильтрации, определяемой выражением (12), а на выходе каждого iwr-го калмановского фильтра из состава их второго блока 9 формируется соответствующая оценка
доплеровской частоты с соответствующей дисперсией Dijq(k+1) ошибки фильтрации, определяемой выражением (12), а на выходе каждого iwr-го калмановского фильтра из состава их второго блока 9 формируется соответствующая оценка  доплеровской частоты с соответствующей дисперсией Djwr(k+1) ошибки фильтрации, определяемой выражением (13).
доплеровской частоты с соответствующей дисперсией Djwr(k+1) ошибки фильтрации, определяемой выражением (13).
В анализаторе 10 осуществляется сравнение вычисленных дисперсий ошибок фильтрации.
Если ijq - й отсчет доплеровской частоты будет обусловлен отражением РЛ сигнала от i-го ЛА аппарата группы, имеющего j-й тип с q-ми условиями полета, то ijq-я динамическая модель (1), являющаяся априорными сведениями в ijq-м калмановском фильтре из состава их первого блока 8, будет наиболее близка к реально наблюдаемому процессу на его входе, то есть будет выполняться условие (14). В этом случае принимается решение об отсутствии воздействия уводящей по скорости помехи и на выходе анализатора 10 формируется разрешающий сигнал для прохождения через второй коммутатор 11 оценки  доплеровской частоты, по которой в третьем вычислителе 12 за К тактов работы оптимальных фильтров вычисляется соответствующая оценка АКФ с ее параметрами
доплеровской частоты, по которой в третьем вычислителе 12 за К тактов работы оптимальных фильтров вычисляется соответствующая оценка АКФ с ее параметрами  и по ним, в соответствии с выражением (11), в четвертом вычислителе 13 - оценка
и по ним, в соответствии с выражением (11), в четвертом вычислителе 13 - оценка  дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА аппарата группы, имеющего j-й тип с q-ми условиями полета, которая по команде «Распознавание» через первый коммутатор 4 поступает на соответствующий ijq-ый вход нейронной сети 5.
дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го ЛА аппарата группы, имеющего j-й тип с q-ми условиями полета, которая по команде «Распознавание» через первый коммутатор 4 поступает на соответствующий ijq-ый вход нейронной сети 5.
За К тактов работы всех калмановских фильтров соответствующая вероятность Pijq предварительного распознавания типа каждого ЛА группы с соответствующими условиями его полета с ijq-го выхода нейронной сети 5 через третий коммутатор 14 по команде «Распознавание» поступает на соответствующий ijq-й вход блока 15 пороговых устройств (по команде «Обучение», подаваемой на вход коммутатора 14, с выхода нейронной сети 5 значения вероятностей предварительного распознавания типа i-го ЛА на входы блока 15 пороговых устройств не поступают), а на их вторые входы поступает единое для всех пороговых устройств значение пороговой вероятности распознавания Рпор типа каждого ЛА группы с соответствующими условиями его полета.
В каждом ijq-м пороговом устройстве блока 15 соответствующее значение вероятности Pijq сравнивается с пороговым значением Рпор. При выполнении условия для каждого значения Pijq≥Рпор принимается окончательное решение о том, что i-й ЛА в группе имеет j-ый тип с q-ми условиями полета, в противном случае принимается решение об отсутствии данного типа ЛА в группе.
Если ijq-й отсчет доплеровской частоты будет обусловлен воздействием уводящей по скорости помехи по w-му закону с r-ым вариантом параметров, то iwr-я динамическая модель, являющаяся априорными сведениями в iwr-м калмановском фильтре из состава их второго блока 9, будет наиболее близка к реально наблюдаемому процессу на его входе, то есть будет выполняться условие (15). В этом случае принимается решение о воздействии уводящей по скорости помехи и на выходе анализатора 10 формируется запрещающий сигнал для прохождения через второй коммутатор 11 оценки  доплеровской частоты и в третьем вычислителе 12 не осуществляется вычисление соответствующей оценки АКФ с ее параметрами
доплеровской частоты и в третьем вычислителе 12 не осуществляется вычисление соответствующей оценки АКФ с ее параметрами  , а также оценки
, а также оценки  дисперсии производной флюктуаций доплеровской частоты (в четвертом вычислителе 13) не производится.
дисперсии производной флюктуаций доплеровской частоты (в четвертом вычислителе 13) не производится.
Для оценки работоспособности предлагаемого способа было проведено его имитационное моделирование по РЛ, отраженным от реальных ЛА, которые (сигналы) были зарегистрированы (с помощью специального бортового регистратора, установленного в приемник импульсно-доплеровской бортовой РЛС современного самолета) на промежуточной частоте с выхода линейной части приемника бортовой РЛС с фазированной антенной решеткой, работающей в сантиметровом диапазоне волн.
Также были зарегистрированы реальные РЛ сигналы уводящей по линейному закону скорости (доплеровской частоте) помехи.
В качестве реальных ЛА, от которых отраженные РЛ были зарегистрированы, использовались 9 типов самолетов при и РЛ наблюдении под различными ракурсами.
Условиями полета ЛА в турбулентной атмосфере являлись:
стационарный полет группы ЛА с выдерживанием заданных дистанций между ЛА в группе (группы из однотипных и разнотипных самолетов);
маневр в группе типа «догон», «торможение»;
маневры составом группы типа «разворот», «змейка».
При моделировании варьировался численный состав группы ЛА, типовой состав группы, условия полета и параметры изменяющейся по линейному закону уводящей по скорости (доплеровской частоте) помехи.
При узкополосном спектральном анализе зарегистрированных реальных РЛ сигналов применялся алгоритм БПФ с эквивалентной полосой пропускания одного бина, равной 10 Гц.
В калмановской процедуре фильтрации (4)-(10) для каждого ijq-го калмановского фильтра из состава их первой группы элементы матриц имели следующие значения.
В матрице Ф(k), размерности 3×3 (в соответствии с динамической моделью (1)), отличные от нуля элементы имели следующие значения
ϕ11=ϕ22=1; ϕ23=Т; ϕ31=-βijqT; ϕ33=1-αijqT.
Ненулевым элементом ковариационной матрицы G(k) шумов возбуждения, размерности 3×3, являлся  .
.
Ненулевыми элементами матрицы наблюдения Н(k), имеющей размерность 1×3, являлись h11=h12=1.
Вектор состояния X(t) имел следующий вид (согласно динамической модели (1))
X(t)=|Fijq(t), ΔFijq(t), F*ijq(t)|т
Отсчеты доплеровских частот в блоке 1 (формула (2)) (для обучения нейронной сети 5), определялись из выражения
 .
.
Вектор наблюдения имел вид
Y11(k+1)=Fijq(k+1)+ΔFijq(k+1)+ζ(k+1).
Элемент вектора невязок измерения имел вид

Элементы вектора оценок имели вид
 5
5


В калмановской процедуре фильтрации (4)-(10) для каждого iwr-го калмановского фильтра из состава их второй группы элементы матриц имели следующие значения.
В матрице Ф(k), размерности 3×3 в соответствии с динамической моделью линейного закона изменения уводящей по доплеровской частоте помехи вида

отличные от нуля элементы имели следующие значения
ϕ11=ϕ22=ϕ33=1; ϕ23=Т.
Матрица наблюдения Н(k), вектор состояния X(t), вектор наблюдения Y(t) имели вид, аналогичный, что и в первой группе калмановских фильтров (блок 8).
Элемент вектора невязок измерения имел вид
 .
.
Элементы вектора оценок имели вид
Архитектура нейронной сети 5 представляла из себя многослойную нейронную сеть прямого распространения, состоящей из трех слоев.
Первый слой нейронов - входной слой сети, на ijq-е входы которой последовательно подавались соответствующие оценки  дисперсии производной флюктуаций доплеровской частоты.
дисперсии производной флюктуаций доплеровской частоты.
Второй, (скрытый) слой нейронной сети - это слой с нелинейной функцией активации.
Третий слой - это выходной слой сети, на ijq-х выходах которой формируются оценки Pijq вероятностей предварительного распознавания i-го самолета в группе, имеющего j-й тип с q-ми условиями полета.
Пороговое значение вероятности принималось равным Рпор=0,9.
Величина дискрета - Т=0,1 с.
В таблице приведены результаты моделирования - вероятности правильного распознавания с доверительной вероятностью 0,95 при отношении сигнал/шум 20 дБ за 14-15 тактов работы калмановских фильтров.
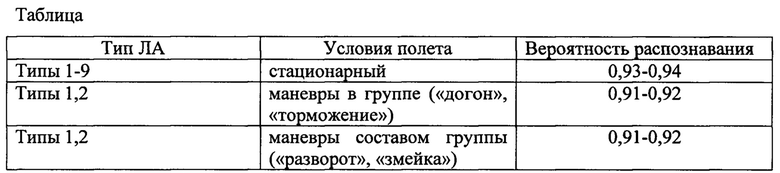
При этом, вероятность правильной идентификации воздействия уводящей по скорости помехи составила 0,89-0,92.
Во всех случаях вероятности ложного распознавания типа ЛА составили порядка 0,015-0,021.
Таким образом, применение предлагаемого изобретения позволит распознать в импульсно-доплеровской РЛС с вероятностью, не ниже заданной, типовой состав ГВЦ при различном ракурсе ее РЛ наблюдения, различных условиях полета и воздействии уводящих по скорости помех.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Пат. 2419815 Российская Федерация, МПК G01S 13/52 (2006.01). Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» [Текст] / Богданов А.В., Васильев О.В., Исаков И.Н., Ситников А.Г., Филонов А.А.; заявитель и патентообладатель ОАО ГСКБ "АЛМА3-АНТЕЙ" им. АКАДЕМИКА А.А. РАСПЛЕТИНА (RU). - №2009140853/09; заявл. 03.11.2009; опубл. 27.05.2011, Бюл. №15 (аналог).
2. Пат. 2802653 Российская Федерация, МПК G01S 13/52 (2006.01). Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети [Текст] / Богданов А.В., Голубенко В.А., Коротков С.С., Максимович С.В., Петров С.Г., Пшеницын А.А., Шепранов В.В., Якунина Г.Р.; заявитель и патентообладатель Военная академия воздушно-космической обороны имени Маршала Советского Союза Г.К. Жукова (RU). - №2022125955; заявл. 04.10.2022; опубл. 30.08.2023, Бюл. №25 (прототип).
3. Ярлыков, М.С.Статистическая теория радионавигации [Текст] / М.С. Ярлыков. - М.: Радио и связь, 1985, с. 189, выражение (6.19).
Изобретение относится к области радиолокации и может быть использовано для всеракурсного распознавания в импульсно-доплеровской радиолокационной станции (РЛС) типового состава групповой воздушной цели (ГВЦ) при различных условиях полета и воздействии уводящих по скорости помех. Технический результат заключается в обеспечении в импульсно-доплеровской РЛС распознавания с заданной вероятностью типового состава ГВЦ при различных ракурсах ее радиолокационного (РЛ) наблюдения, условиях полета и воздействии уводящих по скорости помех. В заявленном способе осуществляют одновременную фильтрацию отсчетов доплеровских частот в калмановских фильтрах из состава их первой группы с первой динамической моделью и из состава их второй группы со второй динамической моделью соответственно, в результате чего на выходе каждого калмановского фильтра из состава первой и второй групп формируется соответствующая оценка доплеровской частоты с различными дисперсиями ошибки фильтрации. По соответствующей оценке на выходе калмановского фильтра из состава первой группы принимают решение о том, что сигнал обусловлен отражениями РЛ сигнала от i-го ЛА группы, имеющего j-й тип с q-ми условиями полета. По соответствующей оценке на выходе калмановского фильтра из состава второй группы принимают решение о том, что присутствует воздействие уводящей по w-му закону с r-ым вариантом параметров уводящей по скорости помехи. 1 ил., 1 табл.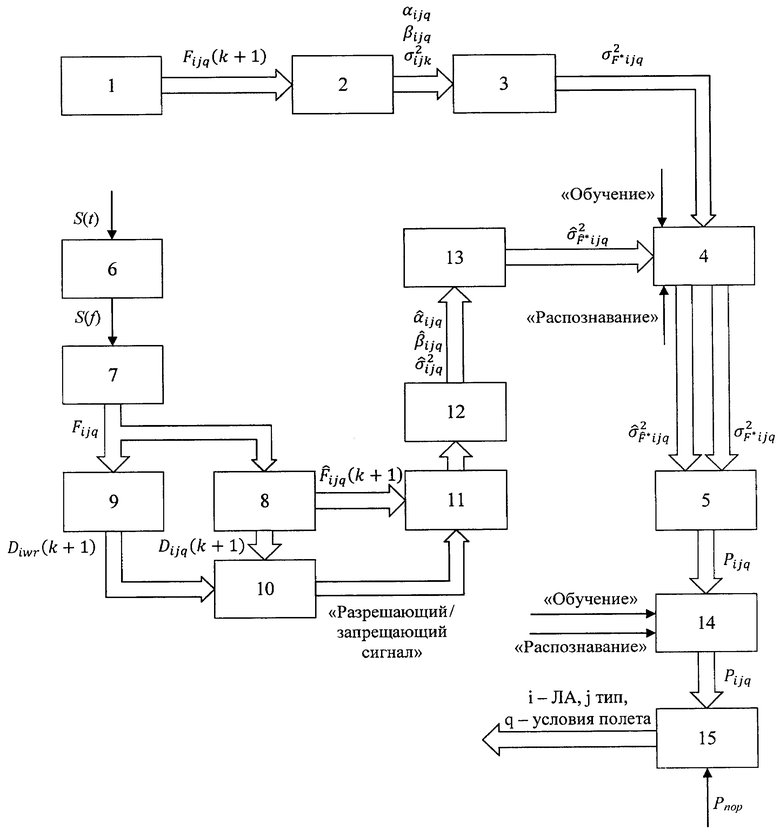
Способ всеракурсного распознавания в радиолокационной станции типового состава групповой воздушной цели при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети, заключающийся в том, что радиолокационный сигнал, отраженный от группы летательных аппаратов, с выхода приемника импульсно-доплеровской радиолокационной станции на промежуточной частоте подвергается узкополосной доплеровской фильтрации на основе процедуры быстрого преобразования Фурье и преобразуется в амплитудно-частотный спектр, спектральные составляющие которого обусловлены отражениями сигнала от планеров летательных аппаратов, путем пороговой обработки амплитудно-частотного спектра сигнала формируют только те отсчеты Fjjq, где i=1,…, I, I - количество летательных аппаратов в группе, j=1,…, J, J - количество типов летальных аппаратов; q=1,…Q, Q - количество условий полета летательного аппарата, доплеровских частот, на частотных позициях которых амплитуды спектральных составляющих превысили установленный порог, в соответствии с i j q - ми динамическими моделями доплеровских частот
где Fijq и ΔFijq - соответственно детерминированная и флюктуационная составляющая доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
F*ijq(t) - производная доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
αijq - величина, обратно пропорциональная времени корреляции доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
βijq - квадрат собственной частоты автокорреляционной функции доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
 - дисперсия производной доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
- дисперсия производной доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
nijq - взаимонезависимые формирующие «белые» гауссовские шумы с нулевыми математическими ожиданиями и единичными интенсивностями для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета,
формируются последовательно в дискретном времени доплеровские частоты в виде

где k=1,…, К - текущий такт формирования доплеровских частот;
К - общее количество тактов формирования доплеровских частот;
Т - значение временного дискрета,
по которым за К тактов осуществляется вычисление значений соответствующей ijq-ой автокорреляционной функции и по ней - соответствующее значение  дисперсии производной доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета в соответствии с выражением
дисперсии производной доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета в соответствии с выражением

где  - дисперсия флюктуаций доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, вычисленные значения дисперсий
- дисперсия флюктуаций доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, вычисленные значения дисперсий  поступают на соответствующие ijq-е входы нейронной сети для предварительного ее обучения для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, от которых заранее были получены и обработаны реальные радиолокационные сигналы, при этом архитектура нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из трех слоев: первого входного слоя нейронной сети, на ijq-е входы которой последовательно подают оценки
поступают на соответствующие ijq-е входы нейронной сети для предварительного ее обучения для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, от которых заранее были получены и обработаны реальные радиолокационные сигналы, при этом архитектура нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из трех слоев: первого входного слоя нейронной сети, на ijq-е входы которой последовательно подают оценки  дисперсии производной доплеровской частоты с выхода соответствующего ijq-го калмановского фильтра из состава их первой группы, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями
дисперсии производной доплеровской частоты с выхода соответствующего ijq-го калмановского фильтра из состава их первой группы, функционирующего в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями 






где  и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно, размерности nxn, n - размерность вектора Х(k+1) состояния;
и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно, размерности nxn, n - размерность вектора Х(k+1) состояния;
Ф(k) - переходная матрица состояния размерности nxn;
G(k) и R(k) - ковариационные матрицы шумов возбуждения и наблюдения размерности nxn и mxm соответственно, m - размерность вектора Y(k+1) наблюдения;
ϒ(k) - вектор-столбец шумов наблюдения, представляющие собой гауссовские «белые» последовательности с нулевыми математическими ожиданиями и матрицами спектральных плотностей Nϒ(k) размерности m;
Н(k) - матрица наблюдения размерности mxn;
Z(k+1) - матрица невязок измерения размерности m;
S(k+1) - матрица весовых коэффициентов размерности nxm;
I - единичная матрица размерности nxn;
«т» - символ транспонирования;
«-1» - символ нахождения обратной матрицы;
 - символ нахождения оценки,
- символ нахождения оценки,
и с соответствующей динамической моделью (1); второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации; третьего выходного слоя сети, на ijq-х выходах которого формируются оценки Pijq вероятностей предварительного распознавания i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, которая сравнивается с пороговым значением Рпор, при выполнении условия для каждого значения вероятности Pijq≥Рпор принимается окончательное решение о том, что i-й летательный аппарат в группе имеет j-й тип с q-ми условиями полета, в противном случае принимается решение об отсутствии данного типа летательного аппарата в группе, осуществляется фильтрация ijq-х отсчетов доплеровских частот соответственно в ijq-х калмановских фильтрах из состава их первой группы с соответствующей ijq-й динамической моделью (1), в результате чего на выходе каждого ijq-го калмановского фильтра из состава их первой группы формируется соответствующая оценка  доплеровской частоты, по которой вычисляется соответствующая оценка автокорреляционной функции и по ней, в соответствии с выражением
доплеровской частоты, по которой вычисляется соответствующая оценка автокорреляционной функции и по ней, в соответствии с выражением

где  - оценка дисперсии оценки флюктуаций доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
- оценка дисперсии оценки флюктуаций доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
 - оценка величины, обратно пропорциональной времени корреляции оценки доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
- оценка величины, обратно пропорциональной времени корреляции оценки доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета;
 - оценка квадрата собственной частоты автокорреляционной функции оценки доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета,
- оценка квадрата собственной частоты автокорреляционной функции оценки доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета,
вычисляется оценка  дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, отличающийся тем, что одновременно осуществляется фильтрация ijq-х отсчетов доплеровских частот в iwr-х калмановских фильтрах из состава их второй с соответствующей iwr-й динамической моделью, где w=1,…, W- количество законов изменения уводящих по скорости помех, r=1,…, R, R - количество вариантов параметров закона изменения уводящих по скорости помех,
дисперсии производной оценки флюктуаций доплеровской частоты для каждого i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, отличающийся тем, что одновременно осуществляется фильтрация ijq-х отсчетов доплеровских частот в iwr-х калмановских фильтрах из состава их второй с соответствующей iwr-й динамической моделью, где w=1,…, W- количество законов изменения уводящих по скорости помех, r=1,…, R, R - количество вариантов параметров закона изменения уводящих по скорости помех,
на выходе каждого ijq-го калмановского фильтра из состава их первой группы наряду с оценкой  доплеровской частоты вычисляется соответствующая дисперсия Dijq(k+1) ошибки фильтрации, определяемая в соответствии с выражением
доплеровской частоты вычисляется соответствующая дисперсия Dijq(k+1) ошибки фильтрации, определяемая в соответствии с выражением

а на выходе каждого iwr-го калмановского фильтра из состава их второй группы формируется соответствующая оценка  доплеровской частоты с соответствующей дисперсией Djwr(k+1) ошибки фильтрации, определяемой выражением
доплеровской частоты с соответствующей дисперсией Djwr(k+1) ошибки фильтрации, определяемой выражением

осуществляется сравнение величин вычисленных дисперсий ошибок фильтрации, при выполнении условия

принимается решение о том, что оценка на выходе ijq-го калмановского фильтра из состава их первой группы обусловлена отражениями радиолокационного сигнала от i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, при выполнении условия
на выходе ijq-го калмановского фильтра из состава их первой группы обусловлена отражениями радиолокационного сигнала от i-го летательного аппарата группы, имеющего j-й тип с q-ми условиями полета, при выполнении условия

принимается решение о том, что оценка  на выходе iwr-го калмановского фильтра из состава их второй группы обусловлена воздействием уводящей по w-му закону с r-ым вариантом параметров уводящей по скорости помехи и вычисление автокорреляционной функции по данной оценке с последующим вычислением оценки
на выходе iwr-го калмановского фильтра из состава их второй группы обусловлена воздействием уводящей по w-му закону с r-ым вариантом параметров уводящей по скорости помехи и вычисление автокорреляционной функции по данной оценке с последующим вычислением оценки  дисперсии производной оценки флюктуаций доплеровской частоты не производится.
дисперсии производной оценки флюктуаций доплеровской частоты не производится.
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции | 2019 |
|
RU2705070C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" | 2009 |
|
RU2419815C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2006 |
|
RU2324952C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЕТЫ С ТУРБОРЕАКТИВНЫМИ ДВИГАТЕЛЯМИ" | 2011 |
|
RU2456633C1 |
| Способ факельно-слоевого сжигания кускового топлива в топках паровых котлов | 1949 |
|
SU91185A1 |
| АМОСОВ О.С | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| CN | |||

