Изобретение относится к области оценки прочности и вопросам технической эксплуатации авиационной техники, а именно к информационным системам, предназначенным для определения, вычисления и индивидуального учета расходования ресурса, а также спектра нагрузок основных элементов планера маневренных самолетов: левая и правая консоли крыла, левая и правая консоли стабилизатора, киль (для двухкилевой схемы - левый и правый киль), фюзеляж. Изобретение позволяет определить нагруженность, накопленную повреждаемость и расход эквивалентного ресурса, а также нагружения (силы и моменты сил), действовавшие в каждый момент времени полета на основные элементы планера самолета.
Известны технические решения систем сбора, регистрации и обработки полетных данных систем и агрегатов планера самолета: патент RU 2125239, G01D 9/00, 1999 г.; патент RU 2173835, G01D 9/00, 2001 г.
Известные технические решения представляют собой различные виды бортовых счетчиков ресурса и устройств для вычисления расхода ресурса планера самолета. Счетчики ресурса предполагают установку на борту в критических зонах конструкции планера специальных датчиков деформации, информация от которых поступает в вычислительную аппаратуру, устанавливаемую на самолет. Одним из основных недостатков таких счетчиков является необходимость проведения специальных мероприятий по обслуживанию датчиков и связанной с ним аппаратуры, требующих обучения технического персонала эксплуатирующих организаций и усложняющих эксплуатацию самолетов. Анализ результатов, выдаваемых счетчиком, в случае сомнения в их достоверности, отказов и сбоев датчиков, преобразователей и других элементов, вмешательства экипажа в работу системы, превышения эксплуатационных ограничений и т.п. путем тестирования счетчика достаточно трудоемок. Кроме того, такой анализ требует дополнительной информации о параметрах полета и действиях экипажа от штатных бортовых устройств регистрации (БУР). Недостатком способов, которые реализованы в этих устройствах, является также то, что такое устройство решает только узкую задачу и, по сути, будучи установленным на одном конкретном самолете, является тем же счетчиком ресурса планера этого самолета, используя для вычислений информацию не от специальных датчиков, а от штатного БУР.
Наиболее близким аналогом является изобретение «Устройство для вычисления расхода ресурса планера самолета» - патент RU 2068198, кл. G07F 17/00, 1996 г. Способ, описанный в патенте, включает: сбор данных; фильтрацию входных данных с целью защиты от сбоев и искажений полетной информации в процессе преобразований и передачи; вычисление полетной массы, состоящей из массы пустого самолета, массы запаса топлива и массы груза; определение этапа полета (руление, взлет, набор высоты полет по маршруту, снижение, приземление) для принятия решения о начале (конце) процесса вычисления эквивалентной наработки элементов планера; анализ результатов расчета и программной поддержки процесса вывода результатов расчетов эквивалентной наработки; принятие решения о начале вычислений эквивалентной наработки; определение экстремумов параметра нормальной перегрузки в центре тяжести; пересчет величины экстремумов в значения изгибающих моментов; обработку по модифицированному алгоритму метода "дождя" в реальном масштабе времени последовательно выделяемых экстремумов; сравнение полученного значения повреждаемости с известной повреждаемостью "типового ресурсного полета", регистрацию полученной информации.
Известное техническое решение включает наземную аппаратуру, основанную на обработке информации от штатных БУР, которая решает ту же узкую задачу расчета нагруженности и расхода ресурса планера самолета, что упомянутые выше бортовые счетчики ресурса и бортовые устройства для вычисления ресурса планера самолета. При этом основным параметром, на основании которого выполняются вычисления, является вертикальная перегрузка в центре масс самолета. Для тяжелых неманевренных самолетов вполне приемлемо предположение о пропорциональном распределении вертикальной составляющей силы, действующей в центре масс, и, следовательно, нагруженности на другие элементы планера. Поэтому принцип работы указанных выше бортовых и наземных устройств вычисления расхода ресурса применим именно для неманевренных самолетов дальней и транспортной авиации. Нагрузки, действующие в полете на конструкцию легких маневренных самолетов, являются не только следствием действия вертикальной силы в центре масс, но и боковой и продольной составляющей силы. Более того, на маневренных участках полета на основные элементы планера действуют соизмеримые по величине аэродинамические силы и моменты сил, зависящие от параметров углового и пространственного движения самолета. Поэтому отдельные элементы планера, например крыло, стабилизатор, кили, нагружаются по-разному и не в пропорции от вертикальной перегрузки. Следовательно, для маневренных самолетов требуется не только индивидуальный, но и поэлементный учет нагруженности конструкции планера. Поэтому выполнение вычислений, согласно известному способу, осуществляемых только на основании измерений вертикальной перегрузки, ведет к существенным ошибкам в определении показателей нагруженности и расходования ресурса элементов планера маневренных самолетов.
Целью настоящего изобретения является создание способа, обеспечивающего решение двух важных эксплуатационных задач: индивидуальный учет нагруженности и расходования ресурса основных элементов планера маневренного самолета с определением спектра нагрузок по каждому элементу планера каждого самолета, а также контроль нагружений на планер и отдельные его элементы после выполнения каждого полета в эксплуатирующей организации с целью информационного обеспечения эксплуатации самолетов по техническому состоянию.
Указанный результат достигается тем, что способ определения расходования ресурса и спектра нагрузок основных элементов планера маневренных самолетов включает регистрацию полетной информации согласно установленному для конкретной модификации самолета перечню аналоговых параметров и разовых команд; считывание зарегистрированной полетной информации с БУР самолета; идентификацию считанной полетной информации с помощью введения паспортных и служебных данных; контроль достоверности считанной полетной информации вместе с дополнительно введенными паспортными и служебными данными, оценивание и, при необходимости, восстановление параметров реального углового положения самолета в связи с регистрацией БУР углов крена, курса и тангажа, допускающими неоднозначность их определения; выделение из считанной полетной информации группы параметров, характеризующих массу остатка топлива в топливных баках самолета, массу грузов на каждой из точек подвески самолета, массу дополнительного снаряжения; группы параметров углового положения самолета: угол тангажа, угол крена, угол курса, а также группы параметров траекторного движения самолета: барометрическая высота, истинная скорость, угол атаки; вычисление с использованием выделенных групп параметров текущей, в каждый момент времени полета, массы самолета, текущего положения центра масс самолета относительно средней аэродинамической хорды крыла, текущих значений осевых и плоскостного моментов инерции; вычисление оптимальных оценок текущих значений угловых скоростей и ускорений вокруг собственных осей самолета, а также угла скольжения; вычисление поправок к измерениям датчиков перегрузок, учитывающих воздействие центробежных сил и касательных ускорений, возникающих в месте установки датчиков при вращательном движении самолета вокруг его осей; вычисление с учетом поправок значений перегрузок в центре масс самолета; определение аэродинамических характеристик самолета с учетом поправок к коэффициентам аэродинамических сил и моментов для каждого конкретного самолета с учетом данных, описывающих пространственное и угловое движение самолета; вычисление текущих значений сил и моментов сил, действующих на основные элементы планера в полете; определение циклической нагруженности элементов планера, а также их эквивалентных показателей расхода ресурса; запоминание результатов циклической нагруженности и эквивалентных показателей расхода ресурса с организацией таблиц дифференциальной повторяемости, строки которых соответствуют сравнительно узким интервалам нагружений по всему возможному диапазону, в которые заносятся значения счетчиков количества эквивалентных циклов нагружений, с возможностью обмена и отображения информации.
При этом зарегистрированная БУР информация с борта самолета подвергается обработке наземным устройством вычисления показателей нагруженности селективно, с выбором по дате и номеру полета.
Для идентификации считанной полетной информации вводят, в том числе, наименование полетного задания, фамилию летчика, параметры, описывающие полетное задание, наличие подвесных дополнительных грузов с указанием точки подвески и типа груза на ней.
Вычисление текущих значений сил и моментов сил, действующих на основные элементы планера в полете, производится для их критических сечений, которыми, как правило, являются: для консоли крыла - бортовое сечение и сечения в узлах аэроупругости крыла, для стабилизатора - в узлах его крепления к фюзеляжу, для киля - сечение подкилевой надстройки и в узлах крепления руля направления.
Порядок вычисления циклической нагруженности элементов планера и их эквивалентных показателей расхода ресурса включает выделение из текущих значений сил и моментов сил экстремумов нагружений на соответствующие элементы планера, причем каждый следующий экстремум выделяют в специальную выборку, только когда разность с предыдущим превышает определенную для элемента планера величину; вычисление с помощью метода потоков «дождя» эквивалентной повреждаемости для положительных и отрицательных нагружений контролируемого элемента планера; вычисление показателей эквивалентного по повторяемости нагружений расходования ресурса каждого из элементов планера.
На чертеже приведена блок-схема реализации способа определения расходования ресурса и спектра нагрузок основных элементов планера маневренных самолетов, где 1 - УСПИ - устройство считывания полетной информации с борта самолета и ее селекции; 2 - УВПСД - устройство ввода паспортных и служебных данных, идентифицирующих выполненный полет; 3 - вычислитель, выполняющий все операции расчета расходования ресурса и спектра нагрузок основных элементов планера; 4 - блок энергонезависимой памяти для хранения результатов вычислений циклической нагруженности и эквивалентных показателей ресурса и ведения индивидуальных, посамолетных и поэлементных баз данных состояния основных элементов планера контролируемых самолетов; 5 - УОРОПИ - устройство отображения результатов обработки полетной информации; 6 - УД - устройство документирования показателей нагруженности, расхода ресурса и спектра нагрузок на отдельный самолет и по парку самолетов, находящихся в эксплуатирующей организации; 7 - БКРКИ - блок контроля работоспособности каналов измерения штатных БУР и оценивания достоверности зарегистрированной информации; 8 - БФВС - блок фильтрации и восстановления сбойных измерений зарегистрированной БУР полетной информации; 9 - БОУП - блок оценивания углового положения самолета в течение всего полета; 10 - БВМЦМИ - блок вычисления текущей массы, центровки и моментов инерции самолета с оценкой остатка топлива и учетом наличия подвесных грузов и снаряжения дополнительного оборудования; 11 - БОУСС - блок оценивания угловых скоростей и ускорений самолета и, при необходимости, значений угла скольжения; 12 - БВПДП - блок вычисления поправок к измерениям датчиков перегрузок; 13 - БВАХ - блок вычисления аэродинамических характеристик самолета; 14 - БВСМ - блок вычисления сил и моментов сил, действующих на основные элементы планера в полете; 15 - БВЦНРР - блок выделения значащих экстремумов нагружений и вычисления циклической нагруженности, а также эквивалентных показателей расхода ресурса каждого из основных элементов планера; 16 - БОСН - блок определения спектра нагружений на основные элементы планера.
Способ осуществляется следующим образом. В течение полета БУР, установленное на самолет, регистрирует параметры полета и бинарные сигналы согласно установленному для данной модификации самолета перечню. После посадки самолета, заруливания и выключения двигателей с помощью УСПИ выполняется считывание зарегистрированной информации с борта самолета. При этом процесс считывания происходит селективно с выбором необходимого для дальнейшей обработки полета.
Считанная полетная информация с использованием УВПСД дополняется необходимыми паспортными и служебными данными, позволяющими однозначно идентифицировать переписанную с БУР информацию. Считанная полетная информация вместе с паспортными и служебными данными поступает в вычислитель и последовательно проходит контроль достоверности через блоки БКРКИ и БФВС. Затем в блоке БОУП выполняется оценивание и, при необходимости, восстановление параметров реального углового положения самолета в связи с особенностями регистрации в БУР углов крена, курса и тангажа, допускающими неоднозначность их определения. Далее информация распределяется на два потока. В один поток входят параметры mт - масса остатка топлива в топливных баках самолета, mГ1…mГn - масса грузов на каждой из n точек подвески, mд - масса дополнительного снаряжения самолета, а также параметры углового положения: ϑ - угол тангажа, γ - угол крена, ψ - угол курса, и траекторного движения самолета: НБ - барометрическая высота, Vист - истинная скорость, α - угол атаки. Этот поток информации попадает в блок БВМЦМИ, в котором вычисляются следующие параметры: mсам - текущая масса самолета, Хт - текущее положение центра масс самолета (центровка) относительно средней аэродинамической хорды (САХ) крыла, текущие значения осевых JX, JY, JZ и плоскостного JXY моментов инерции. Описанные вычисленные значения параметров поступают на вход блока БОУСС. Второй поток составляют те же параметры ϑ, γ, ψ углового положения и НБ, Vист, M (число Маха) и α траекторного движения самолета, а также nX, nY, nZ - перегрузки по каждой из собственных осей самолета и положения δСТл, δСТл - левой и правой консолей стабилизатора, δЭЛ - элеронов и δРН - руля направления.
Этот поток поступает также на вход блока БОУСС. В БОУСС реализована процедура оценивания текущих значений угловых скоростей ωX, ωY, ωZ и ускорений dωX/dt, dωY/dt, dωX/dt вокруг собственных осей самолета, а также, в случае нерегистрации в БУР, угла скольжения β. Из БОУСС объединенный поток информации, в который добавились значения угловых скоростей и ускорений, поступает в блок БВПДП для вычисления поправок к измерениям датчиков перегрузок. Дело в том, что датчики продольной, вертикальной и боковой перегрузок на маневренных самолетах, как правило, установлены с боковым смещением относительно продольной оси самолета, а также относительно центра масс, положение которого изменяется в течение полета вследствие выработки топлива и возможного сброса грузов. Поэтому на чувствительные элементы датчиков перегрузок кроме аэродинамических сил и силы тяги оказывают воздействие также центробежные силы и касательные ускорения, возникающие в месте установки датчиков при вращательном движении самолета вокруг его осей. Для устранения методической ошибки, вызванной влиянием указанных сил и ускорений, вычисляются значения поправок в следующем виде:



где ΔnX(ti), ΔnY(ti), ΔnZ(ti) - текущие значения поправок к измерениям датчиков соответственно продольной, вертикальной и боковой перегрузки; g - гравитационное ускорение; IПх - расстояние (в проекции на продольную ось OX) между точкой установки датчиков и поперечной осью OZ самолета; IПz - расстояние (в проекции на поперечную ось OZ) между точкой установки датчиков и продольной осью ОХ самолета.
С учетом этих поправок вычисляются значения nХцм(ti), nYцм(ti), nZцм(ti) перегрузок в центре масс самолета:
nХцм(ti)=nX(ti)-ΔnX(ti)
nYцм(ti)=nY(ti)-ΔnY(ti)
nZцм(ti)=nZ(ti)+ΔnZ(ti)
С выхода блока БВПДП состав информации подготовлен для вычисления аэродинамических характеристик самолета и поступает в блок БВАХ. Значения коэффициентов аэродинамических сил и моментов известны по результатам модельных и полунатурных исследований самолета в аэродинамических трубах. Определенная корректировка этих коэффициентов выполняется на основании летных испытаний конкретного типа маневренного самолета. Однако каждый отдельный самолет имеет свои собственные аэродинамические характеристики, отличающиеся от исследовательских. Поэтому с целью учета этих отличий каждый из определяющих коэффициентов имеет свою соответствующую поправку. Определение этих поправок, а также возможных ошибок в зарегистрированных БУР измерениях датчиков выполняется в БВАХ с использованием системы дифференциальных уравнений, описывающих пространственное и угловое движение самолета:
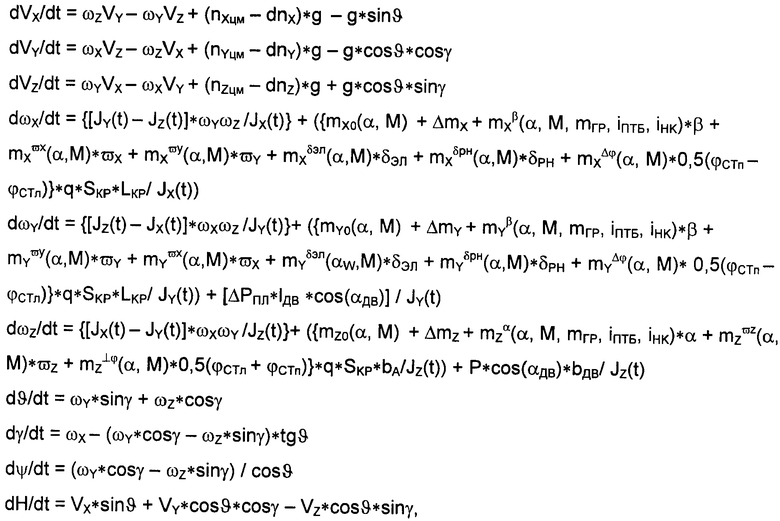
где VX, VY, VZ - соответственно продольная, вертикальная и боковая скорости движения самолета, mX0 - свободная составляющая коэффициента момента силы вокруг продольной оси самолета,  - производная по углу скольжения коэффициента момента силы вокруг продольной оси самолета,
- производная по углу скольжения коэффициента момента силы вокруг продольной оси самолета,  - производная по угловой скорости ωх коэффициента момента силы вокруг продольной оси самолета,
- производная по угловой скорости ωх коэффициента момента силы вокруг продольной оси самолета,  - производная по угловой скорости ωY коэффициента момента силы вокруг продольной оси самолета,
- производная по угловой скорости ωY коэффициента момента силы вокруг продольной оси самолета,  - производная по углу отклонения элерона δэл коэффициента момента силы вокруг продольной оси самолета,
- производная по углу отклонения элерона δэл коэффициента момента силы вокруг продольной оси самолета,  - производная по углу отклонения руля направления δРН коэффициента момента силы вокруг продольной оси самолета,
- производная по углу отклонения руля направления δРН коэффициента момента силы вокруг продольной оси самолета,  - производная по углу Δφ дифференциального отклонения стабилизатора коэффициента момента силы вокруг продольной оси самолета, mY0 - свободная составляющая коэффициента момента силы вокруг вертикальной оси самолета,
- производная по углу Δφ дифференциального отклонения стабилизатора коэффициента момента силы вокруг продольной оси самолета, mY0 - свободная составляющая коэффициента момента силы вокруг вертикальной оси самолета,  - производная по углу скольжения коэффициента момента силы вокруг вертикальной оси самолета,
- производная по углу скольжения коэффициента момента силы вокруг вертикальной оси самолета,  - производная по угловой скорости ωY коэффициента момента силы вокруг вертикальной оси самолета,
- производная по угловой скорости ωY коэффициента момента силы вокруг вертикальной оси самолета,  - производная по угловой скорости ωX коэффициента момента силы вокруг вертикальной оси самолета,
- производная по угловой скорости ωX коэффициента момента силы вокруг вертикальной оси самолета,  - производная по углу отклонения элерона δЭЛ коэффициента момента силы вокруг вертикальной оси самолета,
- производная по углу отклонения элерона δЭЛ коэффициента момента силы вокруг вертикальной оси самолета,  - производная по углу отклонения руля направления δРН коэффициента момента силы вокруг вертикальной оси самолета,
- производная по углу отклонения руля направления δРН коэффициента момента силы вокруг вертикальной оси самолета,  - производная по углу Δφ дифференциального отклонения стабилизатора коэффициента момента силы вокруг вертикальной оси самолета, mZ0 - свободная составляющая коэффициента момента силы вокруг поперечной оси самолета,
- производная по углу Δφ дифференциального отклонения стабилизатора коэффициента момента силы вокруг вертикальной оси самолета, mZ0 - свободная составляющая коэффициента момента силы вокруг поперечной оси самолета,  - производная по углу атаки коэффициента момента силы вокруг вертикальной оси самолета,
- производная по углу атаки коэффициента момента силы вокруг вертикальной оси самолета,  - производная по угловой скорости ωZ коэффициента момента силы вокруг поперечной оси самолета,
- производная по угловой скорости ωZ коэффициента момента силы вокруг поперечной оси самолета,  - производная по углу ⊥φ среднего отклонения стабилизатора коэффициента момента силы вокруг поперечной оси самолета, ϖX=0,5ωXLKP/V - приведенная угловая скорость вокруг продольной оси OX самолета, ϖY=0,5ωYLKP/V - приведенная угловая скорость вокруг вертикальной оси OY самолета, ϖZ=ωZbA/V - приведенная угловая скорость вокруг поперечной оси OZ самолета, mГР - масса грузов на подкрыльевых точках подвески, iПТБ - признак наличия подфюзеляжного бака, iНК - признак выпущенного положения носков крыла, q - скоростной напор, SKP - площадь крыла, LКР - размах крыла, ΔРПЛ - разность тяги правого и левого двигателей, ΔРПЛ=РП-РЛ, IДВ - расстояние между осью двигателя и плоскостью симметрии самолета, αДВ - угол установки двигателя относительно продольной оси самолета, bA - длина САХ крыла, Р - суммарная тяга обоих двигателей самолета, bДВ - расстояние между проекцией горизонтальной проекции оси двигателя на плоскость симметрии самолета и его продольной осью.
- производная по углу ⊥φ среднего отклонения стабилизатора коэффициента момента силы вокруг поперечной оси самолета, ϖX=0,5ωXLKP/V - приведенная угловая скорость вокруг продольной оси OX самолета, ϖY=0,5ωYLKP/V - приведенная угловая скорость вокруг вертикальной оси OY самолета, ϖZ=ωZbA/V - приведенная угловая скорость вокруг поперечной оси OZ самолета, mГР - масса грузов на подкрыльевых точках подвески, iПТБ - признак наличия подфюзеляжного бака, iНК - признак выпущенного положения носков крыла, q - скоростной напор, SKP - площадь крыла, LКР - размах крыла, ΔРПЛ - разность тяги правого и левого двигателей, ΔРПЛ=РП-РЛ, IДВ - расстояние между осью двигателя и плоскостью симметрии самолета, αДВ - угол установки двигателя относительно продольной оси самолета, bA - длина САХ крыла, Р - суммарная тяга обоих двигателей самолета, bДВ - расстояние между проекцией горизонтальной проекции оси двигателя на плоскость симметрии самолета и его продольной осью.
Обозначения ΔmX, ΔmY, ΔmZ представляют собой искомые отклонения аэродинамических коэффициентов соответственно вокруг продольной, вертикальной и поперечной осей реального самолета от полученных на моделях в аэродинамических трубах и скорректированных по летным экспериментам. Аналогично величины dnX, dnY и dnZ представляют собой пересчитанные через перегрузки отклонения аэродинамических коэффициентов сил соответственно лобового сопротивления, подъемной и боковой силы реального самолета от модельных значений. Кроме того, эти величины включают также ошибки определения тяги двигателей и массы самолета.
Кроме того, следует учитывать и наличие возможных ошибок измерения датчиков БУР, величины которых оцениваются также в процессе решения представленной выше системы дифференциальных уравнений. Уравнения измерений используемых параметров БУР записываются в следующем виде:
 - уравнение измерения истинной скорости,
- уравнение измерения истинной скорости,
α=arctg(VY/VX)+Δα - уравнение измерения угла атаки,
НБ=Н+ΔH - уравнение измерения барометрической высоты,
ϑP=ϑ+Δϑ - уравнение измерения угла тангажа,
γP=γ+Δγ - уравнение измерения угла крена,
ΨP=Ψ0-ψ+Δψ - уравнение измерения угла курса,
где Ψ0 - начальное значение регистрируемого угла географического курса.
Задача решения представленной выше системы дифференциальных уравнений с одновременным оцениванием их параметров относится к классу некорректно поставленных обратных задач (задач параметрической идентификации). Она решается путем минимизации регуляризирующего (сглаживающего) функционала вида
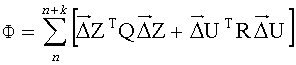 ,
,
где  - представляет собой вектор невязок измеряемых параметров. В свою очередь вектор
- представляет собой вектор невязок измеряемых параметров. В свою очередь вектор
 представляет собой вектор неопределенности исходных данных.
представляет собой вектор неопределенности исходных данных.
Значения аэродинамических коэффициентов самолета вычисляются в процессе решения системы дифференциальных уравнений с использованием следующих соотношений:
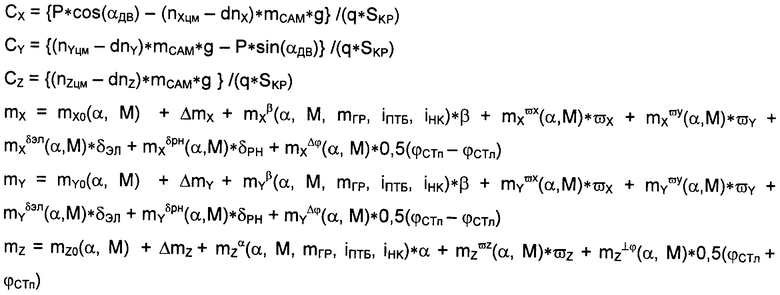
Вычисленные в блоке БВАХ текущие значения аэродинамических коэффициентов сил и моментов сил поступают в блок БВСМ. В этом блоке происходит расчет текущих значений сил и моментов сил, действующих на основные элементы планера в полете и тем самым нагрузки на них. В результате вычислений определяются:
МИЗГ1_КР_Л - изгибающий момент силы, действующий в бортовом (в месте креплении консоли крыла к фюзеляжу) сечении левой консоли крыла;
МИЗГ2_КР_Л - изгибающий момент силы, действующий во втором критическом (в районе одного из узлов аэроупругости) сечении левой консоли крыла;
МКРУТ2_КР_Л - крутящий момент силы, действующий во втором критическом сечении левой консоли крыла;
МИЗГ1_КР_П - изгибающий момент силы, действующий в бортовом сечении правой консоли крыла;
МИЗГ2_КР_П - изгибающий момент силы, действующий во втором критическом сечении правой консоли крыла;
МКРУТ2_КР_П - крутящий момент силы, действующий во втором критическом сечении правой консоли крыла;
РСТ_Л - сила, действующая на левую консоль стабилизатора;
РСТ_П - сила, действующая на правую консоль стабилизатора;
МИЗГ_К_Л - изгибающий момент силы, действующий в контрольном сечении левого киля;
МИЗГ_К_П изгибающий момент силы, действующий в контрольном сечении правого киля.
Поток текущих значений сил и моментов сил, действующих на основные элементы планера, поступает на вход блока БВЦНРР. Этот блок выполняет все необходимые процедуры для расчета циклической нагруженности основных элементов планера, а также их эквивалентных показателей расхода ресурса.
На первом этапе в процессе анализа текущих значений сил и моментов сил выделяются экстремумы нагружений на соответствующие элементы планера. При этом каждый следующий экстремум считается значимым и выделяется в специальную выборку только в том случае, если разность с предыдущим (размах) превышает определенную для элемента планера величину, ΔFЭi, для сил или ΔМЭi для моментов сил.
На втором этапе с использованием алгоритма выделения полных («промежуточных» и полуциклов) циклов, являющегося разновидностью метода потоков «дождя», производится вычисление эквивалентных повреждаемостей для положительных и отрицательных нагружений контролируемого элемента планера. Вычисление выполняется согласно следующим формулам:
 - для положительных эквивалентных циклов нагружения силами;
- для положительных эквивалентных циклов нагружения силами;
 - для отрицательных эквивалентных циклов нагружения силами;
- для отрицательных эквивалентных циклов нагружения силами;
 - для положительных эквивалентных циклов нагружения моментами сил;
- для положительных эквивалентных циклов нагружения моментами сил;
 - для отрицательных эквивалентных циклов нагружения моментами сил. При этом коэффициент Р повреждаемости принимает значение, равное 1, для «промежуточных» циклов и значение, равное ½, для полуциклов.
- для отрицательных эквивалентных циклов нагружения моментами сил. При этом коэффициент Р повреждаемости принимает значение, равное 1, для «промежуточных» циклов и значение, равное ½, для полуциклов.
На третьем этапе в блоке БВЦНРР выполняется расчет показателей эквивалентного (по повторяемости нагружений) расходования ресурса каждого из основных элементов планера. При этом для расчета используются следующие формулы:
 - для нагружения i-го элемента планера силами;
- для нагружения i-го элемента планера силами;
 - для нагружения i-го элемента планера моментами сил. Здесь
- для нагружения i-го элемента планера моментами сил. Здесь  представляет собой расчетную (по назначенному ресурсу) повреждаемость i-го элемента планера за единицу времени, как правило час налета.
представляет собой расчетную (по назначенному ресурсу) повреждаемость i-го элемента планера за единицу времени, как правило час налета.
Полученные в БВЦНРР результаты вычислений циклической нагруженности и эквивалентных показателей расхода ресурса поступают в энергонезависимое ЗУ для хранения в специализированных (посамолетных и поэлементных) базах данных. При этом организуются также таблицы дифференциальной повторяемости, строки которых соответствуют сравнительно узким интервалам нагружений по всему возможному диапазону. В эти строки заносятся значения счетчиков количества эквивалентных циклов нагружений, величина которых соответствует номеру строки.
ЗУ имеет возможность обмена данными с блоком БОСН, который выполняет построение диаграмм со спектром нагружений на каждый основной элемент планера каждого эксплуатируемого самолета. Кроме того, в этом же блоке имеется возможность построения графиков и таблиц интегральной повторяемости нагружений по всему их диапазону.
Накоппенные в ЗУ индивидуальные показатели нагруженности и расхода ресурса основных элементов планера, а также графики, таблицы и диаграммы, отражающие спектр нагружений, могут выводиться на УОРОПИ (дисплей) и для документирования на УД.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ мониторинга в условиях вибрационных испытаний переменной нагруженности и усталостной повреждаемости конструкции беспилотных воздушных судов вертолетного типа | 2022 |
|
RU2772086C1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ РАСХОДА РЕСУРСА ПЛАНЕРА САМОЛЕТА | 1992 |
|
RU2068198C1 |
| СПОСОБ МОНИТОРИНГА НАГРУЗОК И НАКОПЛЕННОЙ УСТАЛОСТНОЙ ПОВРЕЖДАЕМОСТИ В УСЛОВИЯХ ЭКСПЛУАТАЦИИ САМОЛЕТА | 2015 |
|
RU2599108C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2632550C1 |
| РАЗВЕДЫВАТЕЛЬНО-УДАРНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ И СПОСОБ ЕГО ФУНКЦИОНИРОВАНИЯ (ВАРИАНТЫ) | 2019 |
|
RU2749249C2 |
| СПОСОБ ВИБРОДИАГНОСТИРОВАНИЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ В ЭКСПЛУАТАЦИИ ПО ИНФОРМАЦИИ БОРТОВЫХ УСТРОЙСТВ РЕГИСТРАЦИИ | 2014 |
|
RU2556477C1 |
| СПОСОБ ОЦЕНКИ НАГРУЖЕНИЯ КОНСТРУКЦИИ САМОЛЁТА ПРИ ЛЁТНЫХ ПРОЧНОСТНЫХ ИССЛЕДОВАНИЯХ С ИСПОЛЬЗОВАНИЕМ ИСКУССТВЕННЫХ НЕЙРОННЫХ СЕТЕЙ | 2015 |
|
RU2595066C1 |
| БЕСПИЛОТНЫЙ ПАЛУБНЫЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2661277C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
Изобретение относится к области оценки прочности и вопросам технической эксплуатации авиационной техники, а именно к информационным системам, предназначенным для определения, вычисления и индивидуального учета расходования ресурса, а также спектра нагрузок основных элементов планера маневренных самолетов. Технический результат данного изобретения заключается в расширении функциональных возможностей информационных систем планера маневренных самолетов за счет возможности учета и контроля нагруженности и расходования ресурса основных элементов планера маневренных самолетов. Для этого предложен способ определения расходования ресурса и спектра нагрузок основных элементов планера, в котором регистрируют, идентифицируют, проверяют на достоверность и обрабатывают полетную информацию и осуществляют вычисления, в результате которых данные о расходовании ресурса и спектра нагрузок основных элементов планера запоминают и отображают. 4 з.п. ф-лы, 1 ил.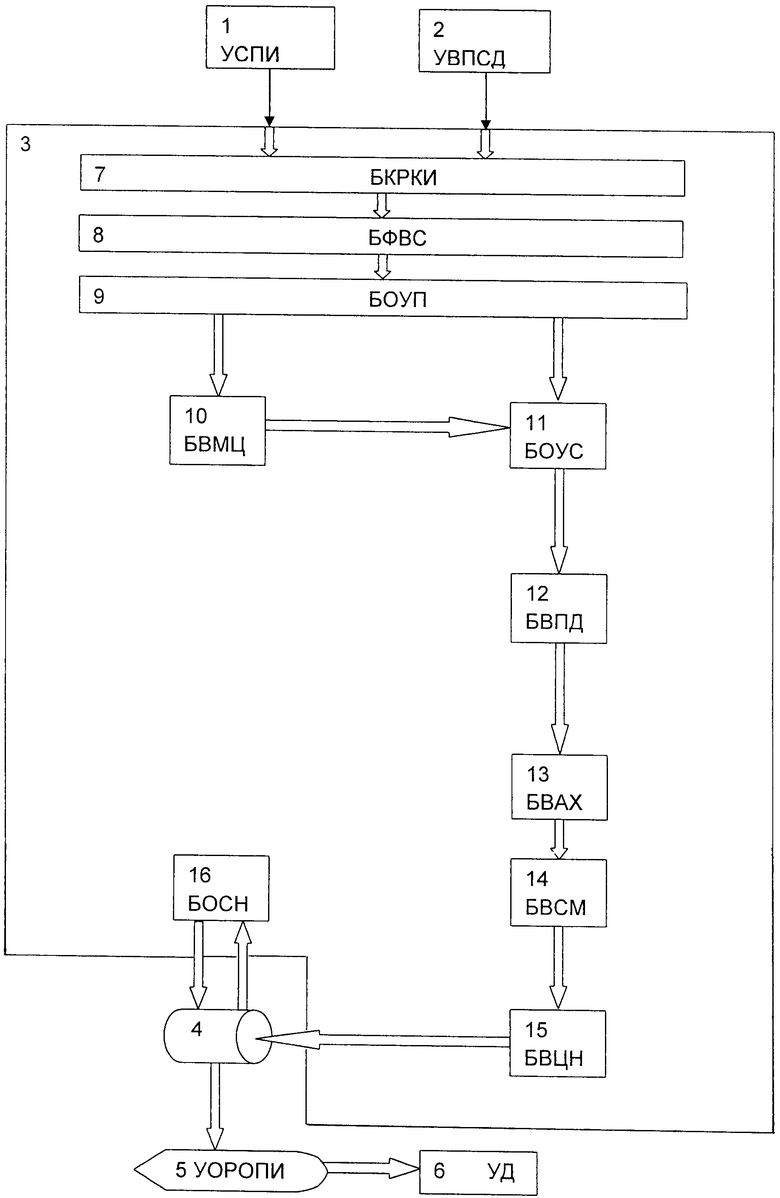
1. Способ определения расходования ресурса и спектра нагрузок основных элементов планера маневренных самолетов включает:
- регистрацию полетной информации согласно установленному для конкретной модификации самолета перечню аналоговых параметров и разовых команд бортовым устройством регистрации;
- считывание зарегистрированной полетной информации с бортовых устройств регистрации самолета;
- идентификацию считанной полетной информации с помощью введения паспортных и служебных данных;
- контроль достоверности считанной полетной информации вместе с дополнительно введенными паспортными и служебными данными, оценивание и, при необходимости, восстановление параметров реального углового положения самолета в связи с регистрацией бортовыми устройствами регистрации углов крена, курса и тангажа, допускающими неоднозначность их определения;
- выделение из считанной полетной информации группы параметров, характеризующих массу остатка топлива в топливных баках самолета, массу грузов на каждой из точек подвески самолета, массу дополнительного снаряжения; группы параметров углового положения самолета: угол тангажа, угол крена, угол курса, а также группы параметров траекторного движения самолета: барометрическая высота, истинная скорость, угол атаки;
- вычисление с использованием выделенной группы параметров текущей в каждый момент времени полета массы самолета, текущего положения центра масс самолета относительно средней аэродинамической хорды крыла, текущих значений осевых и плоскостного моментов инерции;
- вычисление оптимальных оценок текущих значений угловых скоростей и ускорений вокруг собственных осей самолета, а также угла скольжения;
- вычисление поправок к измерениям датчиков перегрузок, учитывающих воздействие центробежных сил и касательных ускорений, возникающих в месте установки датчиков при вращательном движении самолета вокруг его осей;
- вычисление с учетом поправок значений перегрузок в центре масс самолета;
- определение аэродинамических характеристик самолета с учетом поправок к коэффициентам аэродинамических сил и моментов для каждого конкретного самолета с учетом данных, описывающих пространственное и угловое движение самолета;
- вычисление текущих значений сил и моментов сил, действующих на основные элементы планера в полете;
- определение циклической нагруженности элементов планера, а также их эквивалентных показателей расхода ресурса;
- запоминание результатов циклической нагруженности и эквивалентных показателей расхода ресурса с организацией таблиц дифференциальной повторяемости, строки которых соответствуют сравнительно узким интервалам нагружений по всему возможному диапазону, в которые заносятся значения счетчиков количества эквивалентных циклов нагружений, с возможностью обмена и отображения информации.
2. Способ по п.1, отличающийся тем, что зарегистрированная бортовым устройством регистрации информация с борта самолета подвергается обработке наземным устройством вычисления показателей нагруженности селективно с выбором по дате и номеру полета.
3. Способ по п.1, отличающийся тем, что для идентификации считанной полетной информации вводят, в том числе, наименование полетного задания, фамилию летчика, параметры, описывающие полетное задание, наличие подвесных дополнительных грузов с указанием точки подвески и типа груза на ней.
4. Способ по п.1, отличающийся тем, что вычисление текущих значений сил и моментов сил, действующих на основные элементы планера в полете, производится для их критических сечений, которыми, как правило, являются: для консоли крыла - бортовое сечение и сечения в узлах аэроупругости крыла, для стабилизатора - в узлах его крепления к фюзеляжу, для киля - сечение подкилевой надстройки и в узлах крепления руля направления.
5. Способ по п.1, отличающийся тем, что порядок вычисления циклической нагруженности элементов планера и их эквивалентных показателей расхода ресурса включает:
- выделение из текущих значений сил и моментов сил экстремумов нагружений на соответствующие элементы планера, причем каждый следующий экстремум выделяют в специальную выборку только когда разность с предыдущим превышает определенную для элемента планера величину;
- вычисление с помощью метода потоков «дождя» эквивалентной повреждаемости для положительных и отрицательных нагружений контролируемого элемента планера;
- вычисление показателей эквивалентного по повторяемости нагружений расходования ресурса каждого из элементов планера.
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ РАСХОДА РЕСУРСА ПЛАНЕРА САМОЛЕТА | 1992 |
|
RU2068198C1 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2005 |
|
RU2287132C1 |
| СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2262803C2 |
| US 20080249678 A1, 09.10.2008. | |||

