Изобретение касается структуры материальной части системы высокоточного кибернетического оружия, использующего в качестве платформы базирования самолет или крылатую ракету.
Современный уровень развития техники позволяет существенно минимизировать силовой фактор поражающего действия оружия за счет повышения точности. Для этого требуется комплексная системная оптимизация технических средств разведки, ударной силы и управления, позволяющая сосредоточить поражающее воздействие в наиболее критической точке при минимальных экономических затратах и с минимальным риском для людей и природы с обоих сторон противостояния.
Наиболее близкой к предлагаемой по существенным признакам является система вооружения, содержащая планирующие управляемые бомбы, использующие в качестве платформы базирования самолет (см. например: Википедия «GBU-39»).
Крыло и самолетная система управления полетом такой авиабомбы дает возможность точно наводить ее на цель с большого расстояния, достигающего 100 и более километров. При этом, несмотря на отсутствие двигателя, бомба может маневрировать, уменьшая т.о. вероятность ее перехвата. При этом, отсутствие двигателя увеличивает коэффициент полезной нагрузки (боезаряда, системы наведения и др.), а также снижает порог размерности, позволяя, при необходимости, раздробить боезаряд на множество более мелких. Это становится возможным благодаря открывшейся возможности существенной микроминиатюризации приборной части. При этом бомба наводится на цель по одному из классических способов, в частности, с применением лазерной подсветки цели. Недостатками вышеуказанной системы являются:
а) возможность перехвата, т.к. маневрирование недостаточно эффективное средство, чтобы избежать этого, а размеры бомбы и радиозаметность ее, определяемые потребной массой боезаряда, велики.
б) недостаточная надежность и дальность действия системы целеуказания, т.к. она действует лишь в пределах прямой радио или оптической видимости.
в) большой, по необходимости, боезаряд, требующийся для преодоления укрепления объекта и, как следствие, большая опасность поражения расположенных рядом невоенных объектов в случае промаха.
г) ограниченность применения фактора массированности атаки.
д) высокая экономическая затратность данной системы вооружения, обусловленная большой массой и высокой стоимостью планирующих авиабомб.
Целью изобретения является устранение вышеуказанных недостатков.
Предлагается разведывательно-ударный комплекс воздушного базирования, содержащий расположенные на базовом летательном аппарате безмоторные летательные аппараты планерной схемы (далее - планеры), оборудованные системами автоматического пилотирования. Цель изобретения достигается тем, что каждый планер оборудован системой оптической связи с другими планерами данного комплекса, чем обуславливается возможность кооперативных действий планеров. Это дает преимущества в решении задач сбора и передачи информации, а также в решении навигационных проблем. Кроме того, полетная масса планера может быть при этом уменьшена до величин, соизмеримых с массой микроэлектронных элементов указанной системы оптической связи и системы автоматического пилотирования, что обеспечивается открывающейся возможностью эффективного использования суммарного боезаряда, распределенного по многим планерам. В частности, появляется возможность увеличить число планеров в системе с образованием роя или «облака» из планеров, обеспечивающего надежную передачу сигналов разведки, целеуказания, позиционирования и управления, сделав ее устойчивой к повреждающим воздействиям при преодолении системы ПВО, к метеорологическим факторам и всевозможным помехам, в том числе преднамеренным. Таким образом, одиночная, хотя и «умная», бомба заменяется сложной распределенной в пространстве гибкой системой, имеющей много степеней свободы и получающей такие же преимущества в обороне и нападении, какие имеет многоклеточный организм перед одноклеточным. Только в данном случае этот организм имеет размеры в сотни километров и значительно большее количество управляемых степеней свободы. Единственным ее недостатком перед другими большими системами является кратковременность жизни, ограничиваемой временем планирующего спуска с исходной высоты. Это обусловлено отсутствием на планерах двигателей. Но это же является и преимуществом, т.к. отсутствие двигателя снимает ограничения предела миниатюризации, упрощает и удешевляет конструкцию планеров и всей системы.
В частном варианте выполнения система оптической связи содержит на борту каждого планера импульсный источник оптического излучения и фотоприемник, имеющие широкий угол направленности, например полупроводниковый лазер и фотодиод. Фотоприемник соединен с дешифратором кодов посредством блока предварительной параметрической селекции импульсов. При этом, если в угол приема фотоприемника попадает излучение хотя бы одного из других планеров, то образуется временная (виртуальная) линия связи. Множество таких виртуальных связей между отдельными планерами «облака» обеспечивает возможность непрерывной передачи потоков информации из одной точки облака планеров в другую.
Чтобы повысить надежность функционирования такой системы связи при всевозможных повреждениях и помехах, можно установить несколько вышеуказанных оптических блоков, ориентированных по разным направлениям. При этом образуется так называемая фасеточная структура зрения, подобная имеющейся у насекомых. Она отличается от обычного глаза своей широкоугольностью при отсутствии высокой четкости деления изображения на пиксели. Такое устройство, кроме расширения поля зрения по углу, позволяет повысить скорость обработки оптических сигналов при ограниченных возможностях мозга (процессора). При этом сохраняется некоторая угловая избирательность, позволяющая защититься от всевозможных помех, например от света солнца и др.
Причем, в поле зрения отдельной фасетки могут оказаться и лазерные системы ПВО. При этом лазерный импульс может выжечь фотоприемник. Чтобы защититься от этого, предлагается разделить фотоприемник каждой фасетки на несколько элементов, т.е. выполнить его матричным. Это не будут пиксели в обычном понимании, т.к. каждый элемент, по прежнему, будет охватывать несколько точек изображения. Однако, это позволит сохранить работоспособность фасетки при выжигании отдельных ее элементов. Учитывая одноразовость и кратковременность применения планера, являющегося расходным материалом, вероятность накопления критического для работоспособности системы числа поврежденных оптических элементов при любой интенсивности лазерной атаки очень мала.
В частном варианте конструкции планер может выполнять только функцию ретранслятора в системе связи. В других вариантах он может быть оснащен каким-либо исполнительным устройством. Это может быть телевизионная камера оптического или инфракрасного диапазона, которая может использоваться в целях разведки и целеуказания. Это может быть также небольшой боезаряд фугасного или химического действия. При этом не следует безоговорочно преувеличивать опасность химического заряда, когда речь не идет об оружии массового поражения, т.к. здесь обычно имеются в виду заряды останавливающего - не летального действия без необратимых последствий. Причем поражающее действие может быть сосредоточено практически на одном человеке. Подобные системы применяются в ветеринарии в виде обездвиживающих дистанционных инъекций. Может быть также применен датчик состава атмосферы, акустический датчик, электромагнитный датчик или просто радиоприемник, и др., что может быть полезно для получения разведданных.
Предлагается также несколько возможных вариантов способа функционирования предлагаемого Комплекса, которые могут использоваться в различных сочетаниях или независимо.
В частности, предлагается способ функционирования предлагаемого Комплекса, состоящий в автоматическом наведении планера на цель по сигналам системы целеуказания. При этом, согласно изобретению, к одной цели одновременно направляют большое количество планеров, проводя их по разным траекториям таким образом, чтобы они пришли к цели с разных направлений и в одно и то же время. Таким образом, к цели подходит не сосредоточенный снаряд, а распределенный в пространстве рой летательных аппаратов, соизмеримых с размером птиц или даже крупных насекомых, которых невозможно перехватить. Плотность их взаимного расположения достаточно велика только в непосредственной близости от цели, где уже нельзя применять систему перехвата. Их можно смести только сильным потоком ветра. Но в таком случае объектом поражения должна стать ветроустановка. Т.о., действуя кооперативно, часть планеров роя может заняться устранением препятствий на пути к подлету, а другая - будет пробивать следующий эшелон и, наконец, саму цель. При этом, в каждом случае, в поражении может участвовать необходимое число планеров, образующих при одновременном срабатывании кумулятивный эффект.(при этом под кумулятивным эффектом здесь понимается просто повышение эффективности действия одновременного подрыва нескольких близко расположенных зарядов по сравнению с последовательным во времени их подрывом). При этом сила суммарного заряда может варьироваться в зависимости от текущей обстановки в десятки раз. В частности, в случае промаха, регистрируемого телекамерами или системой позиционирования, подрыв боезарядов может быть автоматически отменен.
В другом варианте функционирования предлагаемого Комплекса множество планеров базируют на крылатой ракете, что делается возможным только за счет радикальной компактизации планеров. Это возможно осуществить в пределах существующей микроэлектронной технологии приборостроения. Уже сейчас размеры одного планера могут быть уменьшены до нескольких сантиметров. Базирование таких микропланеров на крылатой ракете позволит увеличить начальную высоту планирования до нескольких десятков километров с соответствующим увеличением дальности планирования. При этом, перед тем, как сбросить планеры, ракету переводят кабрированием в вертикальный полет, чтобы сбросить скорость и использовать всю кинетическую энергию ракеты для увеличения высоты, которая в данном случае ограничивается аэродинамическим нагревом планеров. Если уменьшить удельную нагрузку на крыло до 10 Паскалей, то высоту заброса планеров можно увеличить до 80 км. Однако на такой высоте длина свободного пробега молекул воздуха составляет более сантиметра и поэтому в аэродинамике преобладают вязкостные - диссипативные процессы, резко снижающие аэродинамическое качество крыла. Так что оптимальной является начальная высота планирования 30-40 км, что без проблем обеспечивается крылатой ракетой, которая, к тому же, увеличит общую дальность дистанционного автоматического действия системы до нескольких тыс. км.
Возможен также вариант функционирования Комплекса, в котором часть планеров приземляют на пути к цели с образованием неподвижных опорных точек, используемых в качестве оптических маяков для нужд позиционирования и навигации. При этом часть планеров переводят в режим барожирующего спуска в промежуточных между приземлившимися планерами точках полета. Это необходимо для создания непрерывной ретрансляционной цепи, которую можно протянуть на несколько сотен километров.
Навигационное позиционирование всех планеров в Комплексе может производится с помощью своего рода триангуляции по опорным точкам, например по указанным маякам или по данным, получаемым с базового летательного аппарата. При этом в качестве исходных данных используются текущие расстояния между планерами. Измерение текущих расстояний между планерами производится по времени запаздывания сигналов в системе оптической связи. Т.о. отпадает необходимость использования спутниковой системы позиционирования, которая неустойчива к средствам противодействия.
Изобретение поясняется нижеследующим описанием примеров выполнения и восемью фигурами.
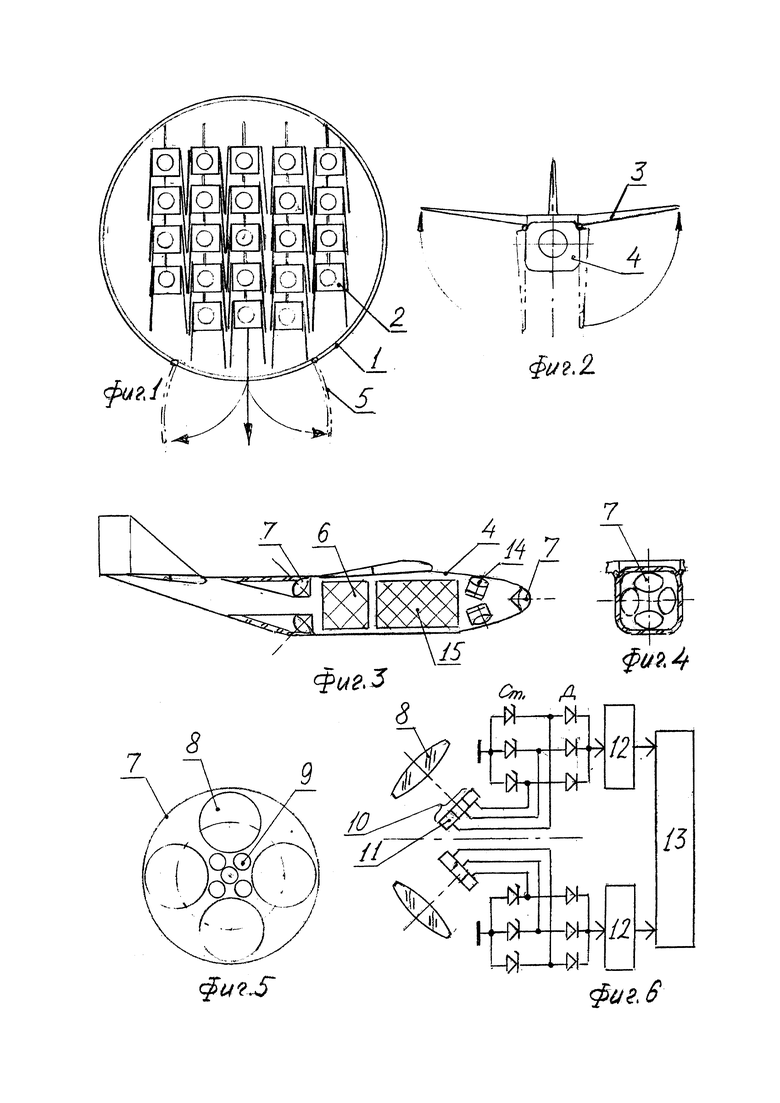
На фиг. 1 изображено поперечное сечение одного из отсеков фюзеляжа базового самолета с расположенными в нем планерами.
На фиг. 2 изображен один из планеров в рабочей конфигурации (вид спереди).
На фиг. 3 дано примерное схематичное изображение внутренней структуры планера.
На фиг. 4 дано поперечное сечение фюзеляжа планера, проходящее через фасеточный пояс бокового обзора системы оптической связи.
На фиг. 5 изображен один из фасеточных блоков системы оптической связи планера.
На фиг. 6 показана схема соединения фотоэлементов фасеточного блока с блоком дешифрации кодов, обеспечивающая защиту от перегрузки и повреждения лазерными системами ПВО.
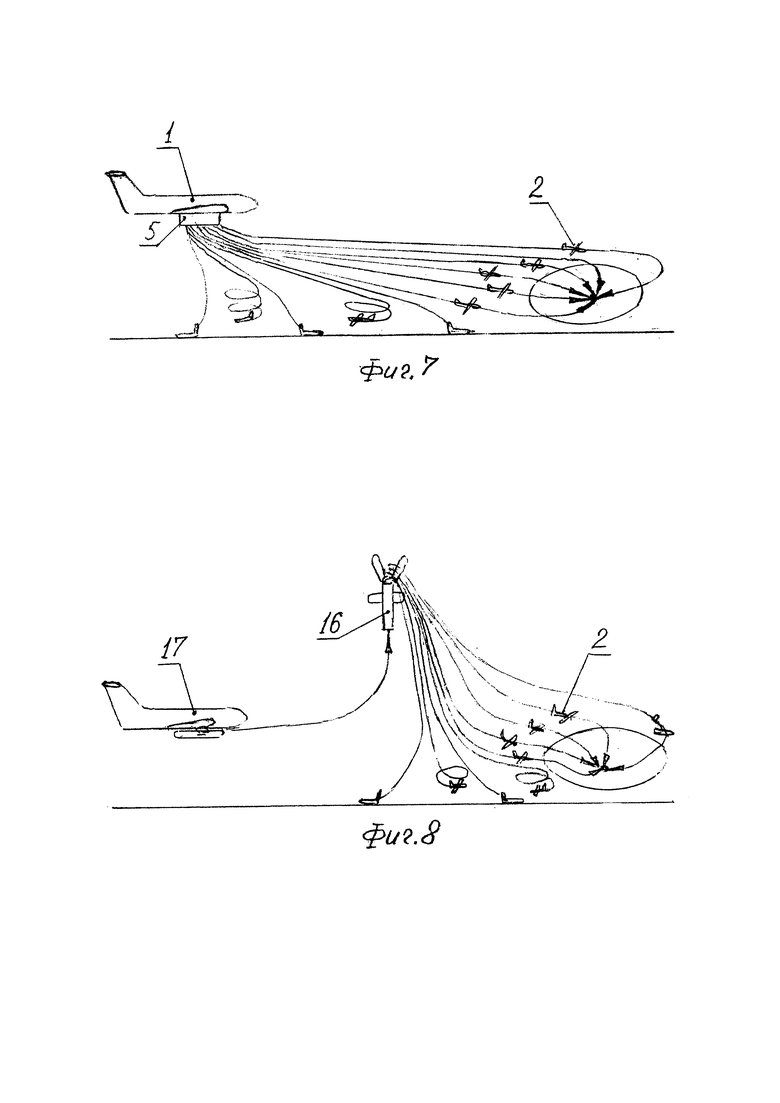
На фиг. 7 проиллюстрирован один из вариантов функционирования предлагаемого Комплекса с базированием его на самолете.
На фиг. 8 проиллюстрирован другой вариант функционирования с использованием в качестве базового летательного аппарата крылатой ракеты.
Предлагаемый разведывательно-ударный комплекс содержит базовый летательный аппарат, в частности самолет 1, в фюзеляже которого плотно размещены планеры 2 (см. фиг. 1). Для увеличения числа помещающихся в самолете 1 планеров крыло 3 планера складывается за счет шарнирного соединения консолей крыла с фюзеляжем 4 планера, как показано на фиг. 2. Когда створки 5 фюзеляжа раскрываются, все находящиеся в данном отсеке фюзеляжа планеры 2 выпадают вниз. При этом консоли крыла 3 раскрываются за счет своих пружин до упора, становясь т.о. в рабочее положение (фиг. 2). При этом в шарнире крыла установлен выключатель, который включает химический источник питания 6, от которого работают все приборы планера, включая рулевые машинки (за исключением бортовых таймеров планеров, которые никогда не отключаются от питания).
К летным качествам планера предъявляется требование высокого аэродинамического качества (15-20 единиц), а также способность самопроизвольно, без помощи управления, входить в режим планирования из любого положения, не входя в штопор. Однако не исключается небольшой процент потерь планеров при их сбрасывании с самолета. Требуется также обеспечить возможность устойчивого прямолинейного полета планера без автопилота. В частности устойчивость по крену может быть достигнута за счет верхнего расположения крыла и применения т.н.з. "поперечного V" крыла (см. фиг. 2). Кроме того, планер должен быть достаточно прочным, чтобы сбрасывание его можно было производить на минимальной скорости полета базового самолета, возможной на высоте не менее 10 км.
Источник питания 6 должен обеспечить работу в течение времени планирующего спуска (1-2 часа). При мощности бортовых нужд 10 вт соответствующая масса литиевой батареи составит около 70 г. Микросхемы и другие элементы электроники системы управления целесообразно разместить в крыле, что позволит использовать поверхность крыла в качестве радиатора.
Каждый из планеров оборудован системой оптической связи, состоящей из множества фасеточных блоков 7, охватывающих в совокупности большую часть сферы. В изображенном на фиг. 3 и 4 вариантах конструкции имеется один носовой фасеточный блок, охватывающий переднюю полусферу, и четыре боковых блока. Все они прикрыты обтекателями с окном прозрачности, соответствующим используемому диапазону оптического излучения (например инфракрасного). Каждый фасеточный блок 7 (фиг. 5) в данном конструктивном варианте состоит из нескольких линз 8, охватывающих в совокупности угол около 120 градусов. Между линзами, в центре блока, расположен один или несколько импульсных полупроводниковых лазеров 9, которые в совокупности также имеют угол рассеивания пучка около 120 градусов. Лазеры имеют отельные объективы малого диаметра. Размеры приемных объективов увеличены для увеличения чувствительности. Однако они все равно могут быть не более нескольких миллиметров, как у глаз животных и человека, где обеспечиваются такие же требования к чувствительности. Впрочем, данная система имеет большие резервы по яркости передающей части, т.к. энергия импульсного лазера может быть сконцентрирована в очень малой длительности по времени. Это делает лазерный источник света (даже не остро направленный) заметным на расстоянии в десятки километров, что ограничивается, однако, метеоусловиями. В данной системе эта проблема решается за счет большой избыточности альтернативных каналов, образуемых множеством планеров. Если какой то планер окажется в полной изоляции (задымление, облачность, рельеф и т.п.) то он какое то время может продолжать планирование вслепую. Планеру не нужна автономная навигационная система, т.к. вполне допустима его потеря, в частности (в боевых условиях) допустимы столкновения. Конечно, при полном отсутствии контроля трудно избежать быстрого накопления дрейфа по курсу. Избежать этого(в случае слепого полета) можно применив автоматическую стабилизацию курса по магнитному компасу (Кстати, есть предположения, что птицы, при полете через океан, этим тоже пользуются).
В фокальной плоскости каждой из линз 8 находится матричный фотоприемник 10. Он состоит из отдельных полупроводниковых фотоэлементов 11 (фиг. 6), например фотодиодов. Число фотоэлементов может быть гораздо меньше числа элементов проектируемого на них изображения. Достаточно нескольких фотоэлементов 11, т.к. в данном устройстве не преследуется задача съемки изображения.
Деление фотоприемника на отдельные фотоэлементы нужно здесь только для защиты системы от перегрузки или поражения лазером. Для этого фототоки множества фотоэлементов 11 присоединены к схеме суммирования токов состоящей из диодов «Д», изображенной на фиг. 6. Кроме этого в схеме имеются диодные ограничители напряжения «Ст». При этом напряжение ограничивается величиной, исключающей возможность повреждения элементов схемы. В случае же необратимого повреждения отдельных фотоэлементов 11 лазерным лучом (выжигания), система продолжает работать от оставшейся части фотоэлементов. Т.о. обрывы или короткие замыкания отдельных из фотоэлементов 11 не влияют на работу остальных.
Выход диодной схемы суммирования токов каждой из линз 8 соединен с отдельным блоком 12 предварительной селекции сигналов, который обрабатывает все поступающие сигналы, выделяя из них импульсы определенных параметров длительности и крутизны фронтов. Импульсы, соответствующие по указанным параметрам принадлежности к данной системе, пропускаются в блок дешифрации 13, в котором записывается временная картина их поступления. Дешифрация заключается в выявлении временной корреляции с набором индивидуальных кодов, присвоенных всем планерам. В случае опознания кода идентификации планера производится расшифровка следующего за ним пакета информации. Для защиты от раскрытия, коды идентификации можно периодически изменять по заранее условленной программе.
Обработка информации состоит, в частности, в вычислении текущих координат каждого планера в некоторой общей системе координат. Для этого сначала вычисляются расстояния до всех планеров, от которых получены сигналы. Это делается по времени запаздывания сигналов. При этом используется бортовой таймер точного времени, а принимаемые сигналы должны содержать время их отправки. Получив таким образом расстояния до планеров, являющихся непосредственными источниками сигналов, можно построить множество лучей. А воспользовавшись аналогичной информацией, полученной другими планерами и переданной по оптической системе связи, можно замкнуть лучи в цепочку треугольников и протянуть эту цепочку на любое расстояние в пределах облака планеров. Этот способ можно назвать методом триангуляции только условно, т.к. мы здесь мы не измеряем углы, как это делается в топографии. Причем временной метод измерения обеспечивает значительно более высокую точность триангуляции, чем угловой. Кроме того он гораздо проще в аппаратной реализации применительно к данному случаю. Протянув цепочку триангуляции до любых двух планеров, координаты которых известны, мы получим привязку к местности. В качестве таких опорных точек можно использовать приземлившиеся планеры, а также базовый самолет.
Полученная таким образом информация используется для автоматического пилотирования каждого планера, осуществляемого под управлением программы, осуществляющей управление операцией в целом. Эта программа может быть размещена на базовом летательном аппарате, или делегирована отдельным планерам с определением иерархии приоритетов.
На борту планера 2 в данном варианте выполнения также имеется одна или две ПЗС телекамеры 14. Они содержат свой объектив. Видеосигнал передается в пакетном режиме по нескольким параллельным цепочкам ретрансляции на базовый летательный аппарат, где изображение может быть обработано людьми.
На борту всех или некоторых планеров может быть размещена боевая часть 15. Это может быть взрывчатка с управляемым взрывателем, или контейнер с каким либо другим веществом. Это может быть и жидкость в сочетании со струйным или другим аппаратом для ее использования. Вместо боезаряда планер может быть оборудован различными датчиками для съема разведывательной информации.
В одном из вариантов предлагаемый Комплекс функционирует следующим образом. Базовый самолет 1 (фиг. 7) подлетает к предполагаемой цели на расстояние, соответствующее дальности планирования, после чего сбрасывает все планеры 2 или нужную часть их с достаточно большой высоты, открывая люки 5 отсеков хранения. При этом включают программу выполнения полетного задания. В частности полетное задание может включать в себя предварительную разведку, которую осуществляют, пилотируя множество планеров 2 в виде рассеянного облака в сторону цели, производя при этом видеосъемку местности. При этом часть планеров 2 можно приземлять в определяемых по видео информации точках с целью получения дополнительной информации с места приземления, в том числе с помощью специальных датчиков. Можно также использовать приземлившиеся планеры в качестве неподвижных опорных навигационных маяков. После уточнения координат цели принимается решение о применении поражающего действия. При этом пилотирование переводится в режим синхронного стягивания облака планеров 2 к точке поражения. Пилотирование осуществляется с использованием текущих координат планеров, вычисляемых описанным выше способом. Т.о. имеется большая избыточность информации позиционирования, допускающая потери большой части планеров без ущерба для функционирования системы.
При приближении к цели следует производить регулирование скорости полета планеров или производить маневрирования, меняющие длину траекторий отдельных планеров, чтобы обеспечить одновременный приход всех планеров в точку поражения. При этом имеется возможность отменить врыв, если текущие вычисления или видеоинформация покажут наличие недопустимого отклонения от цели. Регулировать скорость полета планера можно, управляя закрылками (или элеронами с двухпараметрическим управлением). Если же имеет место эшелонированная оборона объекта, то для преодоления ее может потребоваться производить несколько фокусировок облака планеров с подрывом боезарядов. При этом используется для каждой из них лишь часть планеров облака. Т.е. атака может быть оперативно перестроена в эшелонированную. Для этого следует предусматривать резерв числа планеров, располагая их в пространстве в виде шлейфа из нескольких эшелонов.
В другом варианте предлагаемого способа функционирования предлагаемого Комплекса, для доставки планеров 2 в точку начала планирования используют крылатую ракету 16 (фиг. 8). При этом могут быть достигнуты высоты до 30-40 км и дальности планирования в 300-400 км. На указанных высотах еще можно получить достаточно высокое аэродинамическое качество. На высотах, превышающих 80 км, если не снижать удельную нагрузку на крыло до величин менее 10 Паскалей, начинает сказывается газокинетический нагрев, т.к. скорость планирования начинает превышать скорость звука. При этом также сильно снижается аэродинамическое качество крыла.
Планеры сбрасываются с ракеты 16 после того, как она в кабрирующем баллистическом полете достаточного снизила скорость, чтобы планеры не разрушились от ветра. При этом также будет полезно использована вся кинетическая энергия ракеты.
Крылатая ракета 16, служащая базовым летательным аппаратом, в свою очередь, может базироваться на самолете 17 (фиг. 8). В этой системе, кроме увеличения расстояния планирования увеличивается также и расстояние, с которого базовый самолет 17 может инициировать проведение операции (до нескольких тыс.км), что делает проведение операции более безопасным, а также увеличивает дальность действия предлагаемого комплекса до межконтинентальной и не требующей дозаправки в воздухе. Однако это возможно только при наличии соответствующего канала связи. Кроме традиционных каналов связи при этом может быть сформирована ретрансляционная сеть, образованная дополнительными экземплярами предлагаемого комплекса, приводимыми в действие в промежуточных точках дистанции и в нужное, согласованное по всей системе время. Таким образом можно протянуть дистанционное действие системы на неограниченное расстояние, в том числе и через океан. При этом некоторые планеры могут приводняться, продолжая выполнять ретрансляционные или разведывательные функции.
Таким образом предлагаемый Комплекс позволяет существенно расширить возможности проведения разведывательных и активных воздушных боевых операций, а именно повысить их эффективность, дальность, устойчивость к противодействию, а также снизить их затратность. По сути мы получаем новый тип бомбы - распределенную в пространстве кибер-бомбу. И для ее реализации уже имеется вся необходимая элементная база.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ АЭРОДИНАМИЧЕСКАЯ РАСПРЕДЕЛЁННАЯ СИСТЕМА | 2018 |
|
RU2742495C2 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ НА СВЕРХЗВУКОВУЮ ЦЕЛЬ | 2022 |
|
RU2825905C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2378156C2 |
| СПОСОБ УПРАВЛЕНИЯ АТМОСФЕРНЫМИ ПРОЦЕССАМИ | 2001 |
|
RU2218750C2 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ БОЕВОЕ УСТРОЙСТВО | 2022 |
|
RU2826654C2 |
| КИНЕТИЧЕСКАЯ БОЕГОЛОВКА С АЭРОДИНАМИЧЕСКИМ НАВЕДЕНИЕМ | 2022 |
|
RU2825027C2 |
| КОСМИЧЕСКИЙ ГИПЕРЗВУКОВОЙ КОМПЛЕКС | 1976 |
|
SU1826442A1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| СПОСОБ ДОЗАПРАВКИ ЛЕТАТЕЛЬНОГО АППАРАТА В ВОЗДУХЕ | 2019 |
|
RU2745725C2 |
| КИНЕТИЧЕСКАЯ РАКЕТНО-КОСМИЧЕСКАЯ СИСТЕМА ВООРУЖЕНИЯ | 2020 |
|
RU2752730C1 |
Использование: изобретение относится к технике высокоточного кибернетического оружия. Сущность: с борта базового летательного аппарата - самолета или крылатой ракеты сбрасывается множество планеров малого размера - микропланеров, снабженных системой оптической связи между собой. Планеры образуют облако, осуществляющее управляемый полет, и выполняют функцию ретрансляционной сети, необходимой для функционирования системы. При этом навигационное позиционирование планеров производится с использованием данных по измерению времени задержки сигналов, циркулирующих в указанной оптической системе связи. В процессе полета планеров производится разведка местности, в частности телевизионная, а также производится ударное воздействие, осуществляемое с использованием небольших боезарядов, имеющихся на борту планеров. При этом планеры пилотируются так, что они приходят в точку подрыва с разных сторон и в один и тот же момент времени. Разреженность облака планеров в сочетании с большой их численностью исключает возможность его перехвата на пути к цели. При достижении цели облако стягивается в точку. При этом мощности взрыва отдельных элементов складываются с кумулятивным эффектом. Технический результат: обеспечивается неуязвимость системы при преодолении ею системы ПВО, в частности объектовой; повышается надежность и достоверность передачи разведданных, в частности данных целеуказания, а также уменьшается опасность поражения расположенных рядом невоенных объектов в случае промаха. 3 н. и 1 з.п. ф-лы, 8 ил. 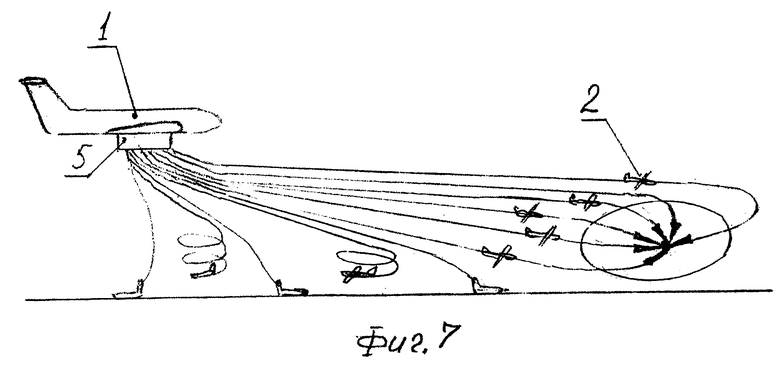
1. Разведывательно-ударный комплекс воздушного базирования (далее - Комплекс), содержащий расположенные на базовом летательном аппарате безмоторные летательные аппараты планерной схемы (далее - планеры), оборудованные системой автоматического пилотирования, отличающийся тем, что каждый планер оборудован системой оптической связи с другими планерами данного комплекса, содержащей ненаправленные импульсный источник света и фотоприемник, которые объединены в блоки, образующие элемент фасеточной системы, поле зрения которой охватывает преобладающую часть сферы и которая содержит несколько объективов, в фокальной плоскости каждого из которых расположен фотоприемник, разделенный на несколько отдельных фотоэлементов, соединенных с блоком обработки сигналов посредством диодной схемы суммирования токов, а суммарная масса боезаряда, необходимая для поражения цели, распределена между несколькими планерами.
2. Способ функционирования Комплекса, выполненного по п.1, состоящий в автоматическом наведении планера на цель по сигналам системы целеуказания, отличающийся тем, что базовый летательный аппарат подлетает к цели на расстояние, соответствующее дальности планирования, и сбрасывает все планеры или нужную их часть через люки отсеков хранения, включают программу выполнения полетного задания, а при приближении к цели производят регулирование скорости полета планеров, управляя для этого закрылками или элеронами с двухпараметрическим управлением, или производят маневрирование, изменяя длину траекторий отдельных планеров, обеспечивая таким образом приход множества планеров к одной цели с разных сторон и в одно и то же время.
3. Способ функционирования Комплекса по п.2, отличающийся тем, что базовый летательный аппарат представляет собой крылатую ракету, которую при подлете к цели на расстояние, соответствующее дальности планирования, пилотируют с кабрированием и сбрасывают планеры в момент достаточного снижения ее воздушной скорости.
4. Способ функционирования Комплекса, выполненного по п.1, отличающийся тем, что планеры размещают либо на базовом самолете, либо на крылатой ракете, при подлете к цели планеры сбрасывают на расстоянии, соответствующем дальности планирования, причем часть планеров приземляют в промежуточных точках на пути движения к цели, а другую часть планеров переводят в режим барражирующего спуска в промежуточных точках, образуя т.о. непрерывную ретрансляционную сеть, служащую для навигационного позиционирования и привязки системы к опорным точкам на местности.
| Балансирный планер | 1980 |
|
SU891501A1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ВЫСОТНОЙ ПОДВЕСКИ ИНФОРМАЦИОННОЙ СИСТЕМЫ И НЕСУЩИЙ АЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2392188C1 |
| US 5179286 A1, 12.01.1993 | |||
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |

