Изобретение относится к области железнодорожной автоматики телемеханики и связи и может быть использовано для управления локомотивами.
Известна бортовая аппаратура автоматической локомотивной сигнализации, содержащая бортовой контроллер и связанные с ним датчики импульсов локомотивные, датчики давления, спутниковую антенну, антенну радиоканала и радиомодем, блок индикации, блок управления, блок переключателей, который соединен с рукояткой бдительности машиниста, переключателем кабины и электропневматическим клапаном, при этом бортовой контроллер включает в себя вычислитель скорости движения, измеритель датчиков давления, микропроцессор контроля и управления, модуль навигационного приемника, формирователь безопасного напряжения и схему контроля, дополнительно содержит блок исполнительных цепей, вход которого по первой внешней шине CAN подключен к микропроцессору контроля и управления, а выход соединен с силовыми цепями локомотива, при этом в бортовой контроллер дополнительно введен микрокомпьютер, один из входов которого соединен через модуль навигационного приемника со спутниковой антенной, другой - через радиомодем с антенной радиоканала, а третий - с блоком индикации, при этом вычислитель скорости движения, измеритель датчиков давления, микропроцессор контроля и управления и микрокомпьютер соединены общей внутренней шиной CAN, которая изолирована от второй внешней шины CAN мостом-CAN (RU 2341396, B61L 25/04, 20.12.2008).
В известном устройстве для определения пройденного пути используется измерение количества импульсов, поступающих от датчиков импульсов, подключенных к колесным парам, а для периодического измерения текущей координаты используется модуль навигационного приемника, соединенный со спутниковой антенной. Определенное значение координаты используется для привязки местоположения локомотива к электронной карте маршрута и для расчета кривой торможения перед местами ограничений скорости. Предпочтительность метода измерения координаты с помощью модуля навигационного приемника связана с тем, что при скорости более 3 км/ч точность этого метода выше, чем точность определения координаты с помощью измерения пройденного пути от датчиков импульсов, подключенных к колесным парам. В процессе измерения пройденного пути по данным от датчиков импульсов, подключенных к колесным парам, накапливается погрешность из-за износа бандажа колесных пар и/или из-за юза и боксования колес, к которым подключены датчики. Однако при движении со скоростью менее 3 км/ч и при отсутствии юза и боксования погрешность измерения координаты с помощью модуля навигационного приемника, составляющая ± 25 м, превышает погрешность определения координаты с помощью датчиков импульсов. Поэтому при движении со скоростью менее 3 км/ч в известном устройстве используют определение координаты с помощью датчиков импульсов.
Недостатком известного устройства является снижение точности при сбоях в работе модуля навигационного приемника, при юзе и боксовании колес и при переключениях с одного метода измерения координаты на другой. Во время переключения с одного метода измерения координаты на другой может произойти скачкообразная ошибка в измерении координаты места положения головы поезда, имеющая такую величину, которая приводит к ложной фиксации проезда поездом светофора с запрещающим сигналом, без выполнения требования обязательной предварительной остановки поезда в пределах 200 м перед этим светофором. Согласно инструкции по движению, если поезд выполнил такую остановку, то ему разрешается продолжать затем движение за этот светофор со скоростью менее 20 км/ч. Если остановка поезда в пределах последних 200 м перед таким светофором не будет зафиксирована устройством бортовой аппаратуры автоматической локомотивной сигнализации, то за светофором сработает система экстренного торможения поезда.
В качестве прототипа принято устройство бортовой аппаратуры автоматической локомотивной сигнализации, содержащее бортовой контроллер и связанные с ним блок датчиков импульсов, локомотивный датчик давления, последовательно соединенные антенну радиоканала и радиомодем, соединенные с бортовым контроллером спутниковую антенну, блок индикации, блок управления, блок переключателей, который соединен с переключателем кабины, рукояткой бдительности машиниста и электропневматическим клапаном, и блок исполнительных цепей, причем бортовой контроллер содержит модуль вычислителя скорости движения, вход которого соединен с блоком датчиков импульсов, модуль измерителя датчиков давления, вход которого соединен с локомотивным датчиком давления, модуль навигационного приемника, вход которого соединен со спутниковой антенной, а выход - с первым портом микрокомпьютера, второй порт которого соединен с радиомодемом, третий порт соединен с первым входом блока индикации, второй вход которого соединен с первым выходом модуля контроля и управления, первый вход которого соединен с выходом блока управления, а второй выход - через модуль контроля и формирователь безопасного напряжения соединен с первым входом блока переключателей, выход которого соединен со вторым входом модуля контроля и управления, первый порт которого через первую шину внешнего интерфейса CAN соединен с блоком исполнительных цепей, предназначенным для подключения к исполнительным цепям локомотива, мост CAN своим первым портом через вторую шину внешнего интерфейса CAN соединен с внешними устройствами, а вторым портом соединен через внутреннюю общую шину интерфейса CAN с модулем контроля и управления, с микрокомпьютером, модулем измерителя датчиков давления и модулем вычислителя скорости движения, порт модуля корректирования координаты соединен с внутренней общей шиной интерфейса CAN, а вход соединен с выходом блока датчиков импульсов (RU2411153, B61L 25/00, 10.02.2011).
В этом устройстве вероятность ложных экстренных торможений из-за больших скачкообразных ошибок в измерении текущей координаты места положения головы поезда, при переключении алгоритмов измерения, уменьшена за счет того, что в устройство введен модуль корректирования координаты, который разрешает переход с одного метода измерения текущей координаты на другой, только тогда, когда разница результатов в оценке координаты обоими методами за счет процесса автоподстройки становится незначительной.
Однако в известном устройстве при сбоях в работе навигационного приемника или неточном определении координаты по данным датчиков импульсов из-за юза и/или боксования модуль корректирования координаты при значительном расхождении в результатах определения координат по двум алгоритмам не может минимизировать ошибку в измерении координаты посредством переключения алгоритмов, и тогда сохраняется повышенная вероятность ложных экстренных торможений из-за того, что остановка поезда в пределах последних 200 м перед светофором с запрещающим сигнальным показанием не будет зафиксирована устройством бортовой аппаратуры автоматической локомотивной сигнализации.
Технический результат изобретения заключается в снижении вероятности ложных экстренных торможений поезда из-за ошибок определения текущих координат головы поезда.
Технический результат достигается тем, что устройство бортовой аппаратуры автоматической локомотивной сигнализации, содержащее бортовой контроллер и связанные с ним блок датчиков импульсов, локомотивный датчик давления, последовательно соединенные антенну радиоканала и радиомодем, соединенные с бортовым контроллером спутниковую антенну, блок индикации, блок управления, блок переключателей, который соединен с переключателем кабины, рукояткой бдительности машиниста и электропневматическим клапаном, и блок исполнительных цепей, причем бортовой контроллер содержит модуль вычислителя скорости движения, вход которого соединен с выходом блока датчиков импульсов, к которому подключен вход модуля корректирования координаты, модуль измерителя датчиков давления, вход которого соединен с локомотивным датчиком давления, модуль навигационного приемника, вход которого соединен со спутниковой антенной, а выход - с первым портом микрокомпьютера, второй порт которого соединен с радиомодемом, третий порт соединен с первым входом блока индикации, второй вход которого соединен с первым выходом модуля контроля и управления, первый вход которого соединен с выходом блока управления, а второй выход через модуль контроля и формирователь безопасного напряжения соединен с первым входом блока переключателей, выход которого соединен со вторым входом модуля контроля и управления, первый порт которого через первую шину внешнего интерфейса CAN соединен с блоком исполнительных цепей, предназначенным для подключения к исполнительным цепям локомотива, мост CAN своим первым портом через вторую шину внешнего интерфейса CAN соединен с внешними устройствами, а вторым портом соединен через внутреннюю общую шину интерфейса CAN с модулем контроля и управления, с микрокомпьютером, модулем измерителя датчиков давления, модулем вычислителя скорости движения и модулем корректирования координаты, согласно изобретению снабжено блоком интерфейса согласования с приемными катушками локомотива, а в бортовой контроллер введены модуль фиксации моментов времени резкого изменения амплитуды сигналов АЛС в приемных катушках локомотива и модуль фиксации моментов времени смены длительности кодового цикла сигналов АЛС числового кода, принимаемых приемными катушками локомотива, при этом порты модулей соединены с внутренней общей шиной интерфейса CAN, а их входы подключены соответственно к первому и второму выходам блока интерфейса согласования с приемными катушками локомотива.
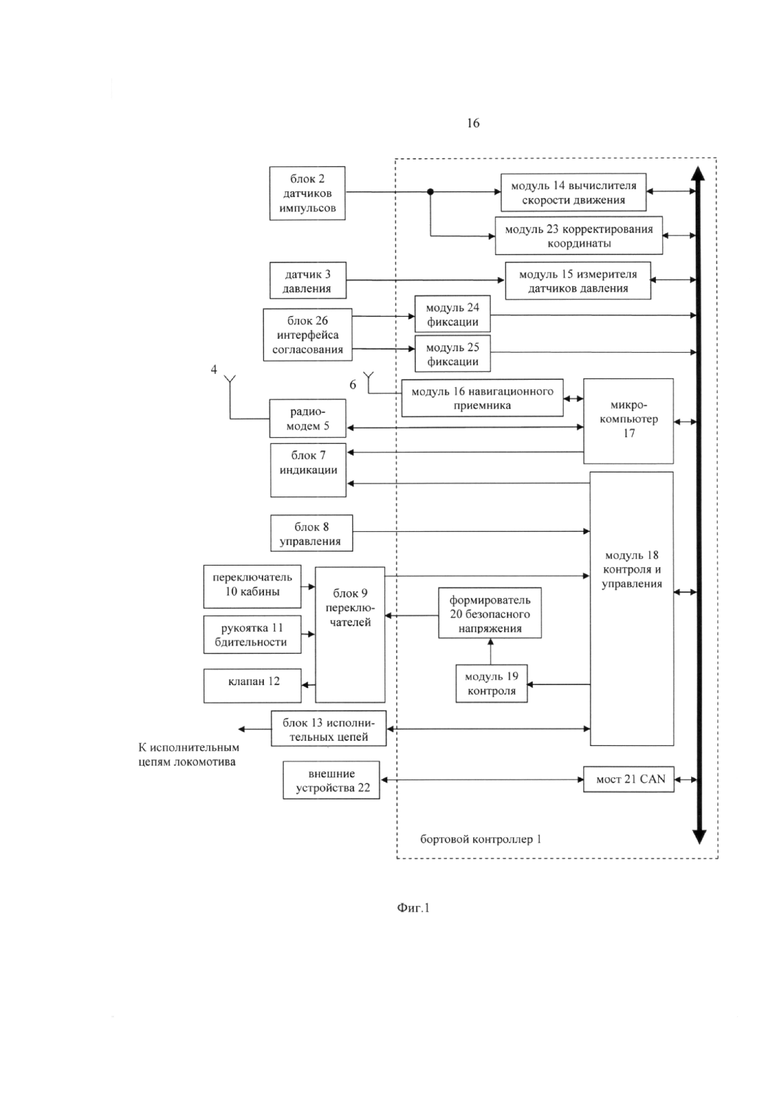
На фиг.1 приведена структурная схема устройства бортовой аппаратуры автоматической локомотивной сигнализации.
Устройство бортовой аппаратуры автоматической локомотивной сигнализации содержит бортовой контроллер 1 и связанные с ним блок 2 датчиков импульсов, локомотивный датчик 3 давления, последовательно соединенные антенну 4 радиоканала и радиомодем 5, соединенные с бортовым контроллером спутниковую антенну 6, блок 7 индикации, блок 8 управления, блок 9 переключателей, который соединен с переключателем 10 кабины, рукояткой 11 бдительности машиниста и электропневматическим клапаном 12, и блок 13 исполнительных цепей, причем бортовой контроллер 1 содержит модуль 14 вычислителя скорости движения, вход которого соединен с выходом блока 2 датчиков импульсов, к которому подключен вход модуля 23 корректирования координаты, модуль 15 измерителя датчиков давления, вход которого соединен с локомотивным датчиком 3 давления, модуль 16 навигационного приемника, вход которого соединен со спутниковой антенной 6, а выход - с первым портом микрокомпьютера 17, второй порт которого соединен с радиомодемом 5, третий порт соединен с первым входом блока 7 индикации, второй вход которого соединен с первым выходом модуля 18 контроля и управления, первый вход которого соединен с выходом блока 8 управления, а второй выход - через модуль 19 контроля и формирователь 20 безопасного напряжения соединен с первым входом блока 9 переключателей, выход которого соединен со вторым входом модуля 18 контроля и управления, первый порт которого через первую шину внешнего интерфейса CAN соединен с блоком 13 исполнительных цепей, предназначенным для подключения к исполнительным цепям локомотива, мост 21 CAN своим первым портом через вторую шину внешнего интерфейса CAN соединен с внешними устройствами 22, а вторым портом соединен через внутреннюю общую шину интерфейса CAN с модулем 18 контроля и управления, с микрокомпьютером 17, модулем 15 измерителя датчиков давления, модулем 14 вычислителя скорости движения и модулем 23 корректирования координаты, в бортовом контроллере 1 модуль 24 фиксации моментов времени резкого изменения амплитуды сигналов АЛС в приемных катушках локомотива и модуль 25 фиксации моментов времени смены длительности кодового цикла сигналов АЛС числового кода, принимаемых приемными катушками локомотива, своими портами соединены с внутренней общей шиной интерфейса CAN, а их входы подключены соответственно к первому и второму выходам блока 26 интерфейса согласования с приемными катушками локомотива.
Устройство бортовой аппаратуры автоматической локомотивной сигнализации работает следующим образом.
Модули устройства взаимодействуют посредством межмодульного интерфейса CAN. Каждый модуль циклически выдает в CAN информацию о своем состоянии и результаты своей работы. Вместе с тем, каждый из модулей выделяет из сообщений других модулей информацию, необходимую ему для работы. Модуль 18 контроля и управления, имеющий для безопасности два независимых канала обработки информации, решает задачи управления локомотивом и по результатам контроля бдительности машиниста и выполнения скоростных ограничений выдает управляющие воздействия на средства торможения поезда. Модуль 16 навигационного приемника через спутниковую антенну 6 принимает сигналы от спутников радионавигационных систем ГЛОНАСС и GPS. Точность автономного определения скорости (с вероятностью 95%) 0,1 м/с, а среднеквадратическая горизонтальная ошибка автономного определения положения до 25 м (см. журнал «Железные дороги мира», №7, 2003, статья «Микропроцессорные локомотивные системы обеспечения безопасности движения поездов нового поколения»).
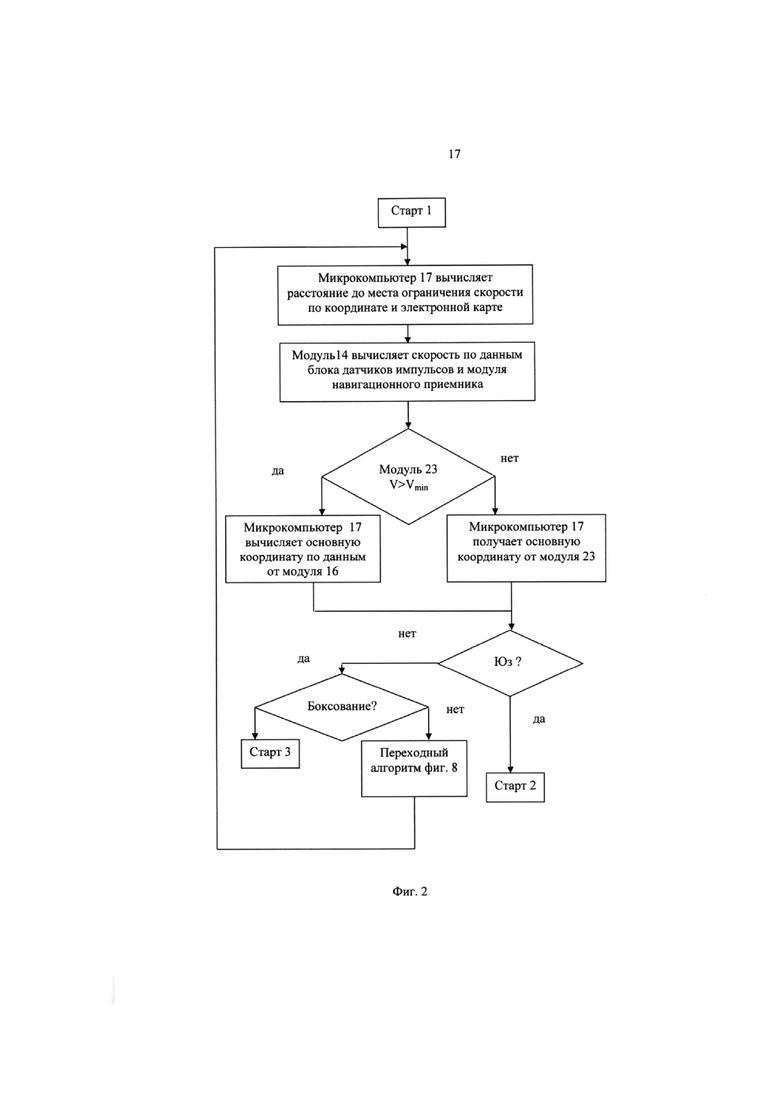
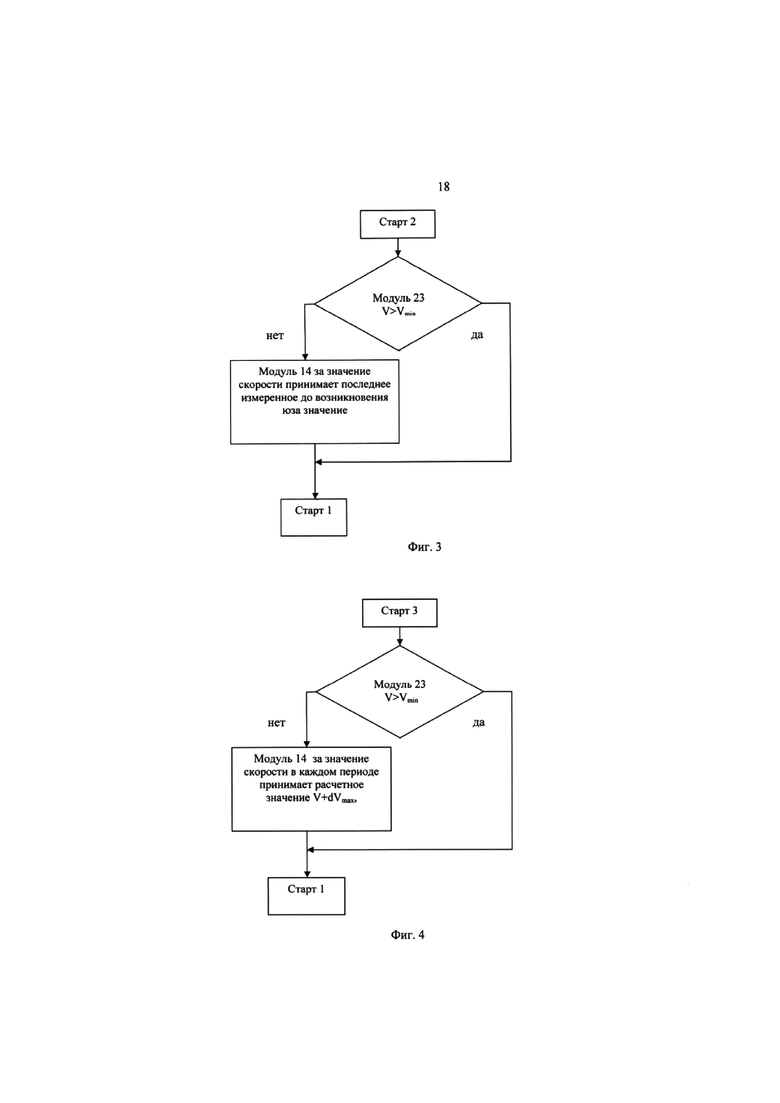
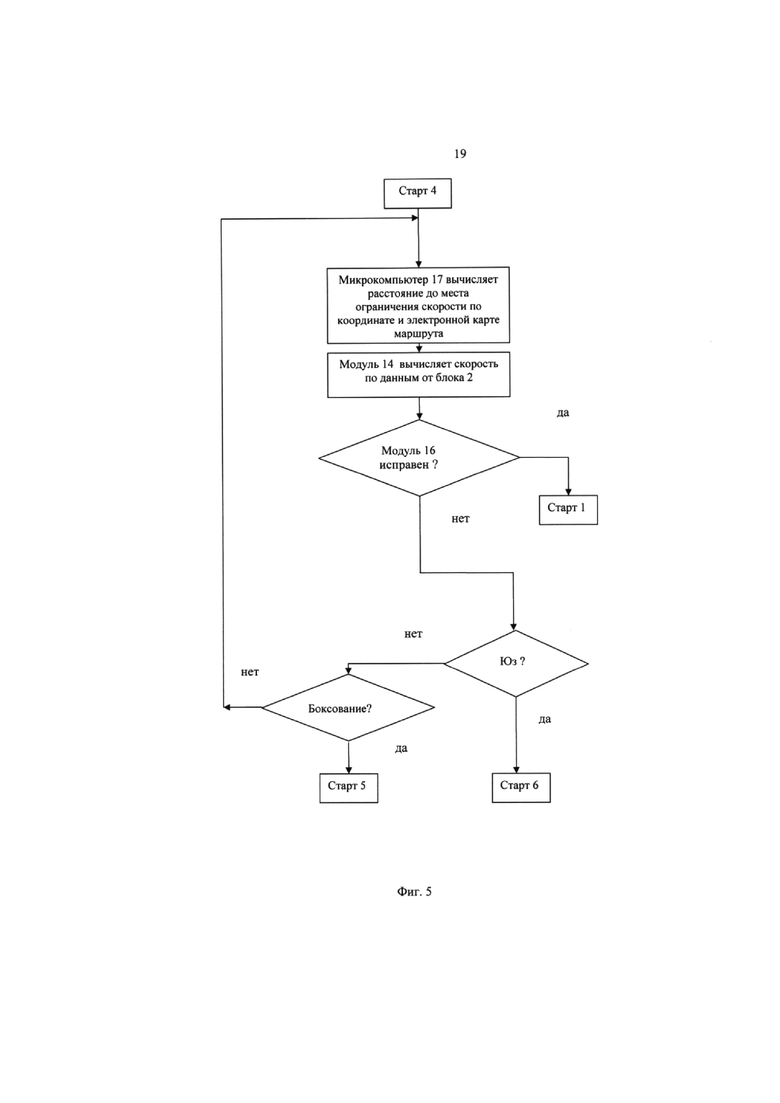
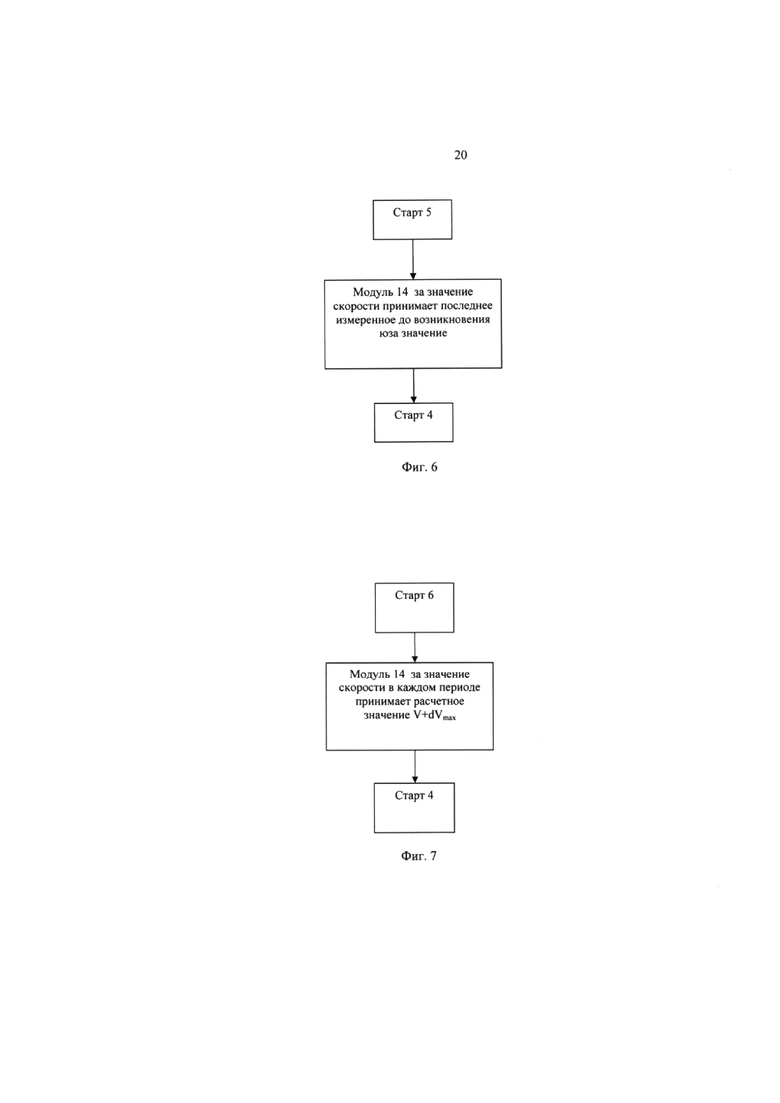
Модули бортового контроллера 1, соединенные с блоком 2 датчиков импульсов (модуль 14 вычислителя скорости движения и модуль 23 корректирования координаты), непрерывно получают импульсы, по которым они вычисляют значения фактической скорости локомотива и пройденного пути. Модуль 14 вычислителя скорости движения производит подсчет импульсов, приходящих в единицу времени от блока 2 датчиков импульсов, и определяет скорость движения локомотива V. Измеренные значения скорости через межмодульный интерфейс CAN передаются в другие модули устройства, в частности в модуль 23 корректирования координаты. Модуль 23 корректирования координаты сравнивает текущие значения скорости движения локомотива V с заданным пределом Vmin (например, 3 км/ч), при достижении которого происходят переключения алгоритмов определения и использования координаты. При достижении Vmin модуль 23 корректирования координаты осуществляет плавный переход между алгоритмами работы модуля 16 навигационного приемника, микрокомпьютера 17 и модуля 14 вычислителя скорости движения. Когда V>Vmin, микрокомпьютер 17 определяет на электронной карте маршрута место нахождения поезда по координате, полученной с помощью модуля 16 навигационного приемника. При V<Vmin микрокомпьютер 17 определяет на электронной карте маршрута место нахождения поезда по координате, полученной с помощью модуля 23 корректирования координаты, который рассчитывает координату по информации от блока 2 датчиков импульсов. Плавный переход с одного алгоритма на другой обеспечивается модулем 23 корректирования координаты, включающим в микрокомпьютере 17 специальный алгоритм, обеспечивающий введение временной поправки, позволяющей результаты расчета координаты, с использованием информации от блока 2 датчиков импульсов, постепенно приближать к результатам определения координаты с помощью модуля 16 навигационного приемника. При достижении разрешенной разницы в результатах двух методов определения координаты (например, 2 м) микрокомпьютер 17 переключает алгоритмы расчета без возникновения сбоев в работе системы управления торможением. Параметры движения поезда непрерывно отображаются на экране блока 7 индикации. Алгоритмы переключения режимов работы устройства, зависящих от работы модуля 23 корректирования координаты, исправности канала спутниковой навигации и условий по юзу или боксованию колес локомотива, приведены на фиг.2 - 7. На фиг.2 показан алгоритм переключения режимов работы для случаев, когда модуль 16 навигационного приемника работает исправно. Здесь вначале микрокомпьютер 17 вычисляет расстояние до места ограничения скорости по ранее определенной координате и электронной карте маршрута. Затем модуль 14 вычислителя скорости движения вычисляет скорость по частоте импульсов от блока 2 датчиков импульсов. Далее микрокомпьютер 17 анализирует информацию от модуля 23 корректирования координаты по текущей скорости. Если V>Vmin, то микрокомпьютер 17 вычисляет координату по данным от модуля 16 навигационного приемника, а если V<Vmin, то микрокомпьютер 17 получает значение координаты от модуля 23 корректирования координаты, который рассчитывает ее прибавлением пройденного пути к предыдущему значению координаты. Далее модулем 23 корректирования координаты проверяется наличие юза или боксования колес локомотива. Если юз или боксование колес локомотива отсутствуют, то модуль 23 корректирования координаты реализует алгоритм, показанный на фиг.8, и цикл повторяется снова. Переходный алгоритм обеспечивает отсутствие больших скачков в оценке координаты поезда при переключении алгоритмов определения координаты, предотвращая сбои в работе устройства. При фиксации юза или боксования модуль 23 корректирования координаты (по скачкообразному уменьшению или увеличению частоты импульсов, принимаемых от блока 2 датчиков импульсов) выполняет переход к соответствующим алгоритмам обработки. При V<Vmin и наличии юза работа микрокомпьютера 17 и модуля 14 вычислителя скорости движения происходит в соответствии с фиг.3, а при V<Vmin и наличии боксования работа этих устройств происходит в соответствии с фиг.4. На фиг.3 показано, что во время юза модуль 14 при V<Vmin сохраняет в качестве измеренного последнее значение скорости, определенное им до возникновения режима юза. Это решение обусловлено тем, что при юзе скорость не увеличивается (даже на уклонах). На фиг.4 показано, что во время боксования модуль 14 при V<Vmin считает, что скорость может повышаться, и за время каждого цикла расчета добавляет к ранее определенному значению V значение dVmax максимально возможного приращения скорости при боксовании. В очередном цикле, при выполнении условия V>Vmin, работа микрокомпьютера 17 возвращается на режим по фиг.2 с определением скорости по изменению координаты. Фиг.5 иллюстрирует случай, когда модуль 16 навигационного приемника допускает сбои в работе, например, из-за пропадания сигналов от спутников радионавигационных систем ГЛОНАСС и GPS. Здесь вначале микрокомпьютер 17 вычисляет расстояние до места ограничения скорости по координате и электронной карте маршрута. Далее модуль 14 вычислителя скорости движения вычисляет скорость по данным от блока 2 датчиков импульсов. Затем микрокомпьютер 17 проверяет восстановление работоспособности модуля 16 навигационного приемника, и при положительном результате работа устройства возвращается на режим по фиг.2. Если модуль 16 навигационного приемника не восстановил свою работоспособность, то с помощью модуля 23 корректирования координаты поверяется наличие юза или боксования колес локомотива. Если юз или боксование колес локомотива отсутствуют, то цикл повторяется снова. Возникновение юза или боксования модуль 23 корректирования координаты определяет соответственно по скачкообразному уменьшению или увеличению частоты импульсов, принимаемых от блока 2 датчиков импульсов. При наличии юза работа микрокомпьютера 17 и модуля 14 вычислителя скорости движения происходит в соответствии с фиг.6, а при наличии боксования работа микрокомпьютера 17 и модуля 14 происходит в соответствии с фиг.7.
На фиг.6 показано, что во время юза модуль 14 сохраняет в качестве измеренного последнее значение скорости, определенное им до возникновения режима юза. Это решение обусловлено тем, что при юзе скорость не увеличивается (даже на уклонах).
На фиг.7 показано, что во время боксования модуль 14 считает, что скорость может повышаться, и за время каждого цикла расчета добавляет к ранее определенному значению V значение dVmax максимально возможного приращения скорости при боксовании.
Таким образом, при сбоях в работе модуля 16 навигационного приемника для всех скоростей измерение параметров движения производится только по импульсам, поступающим от блока 2 датчиков импульсов. Однако блок 2 датчиков импульсов точно откалиброван на непосредственно предшествующих этапах движения поезда с исправной работой модуля 16 навигационного приемника.
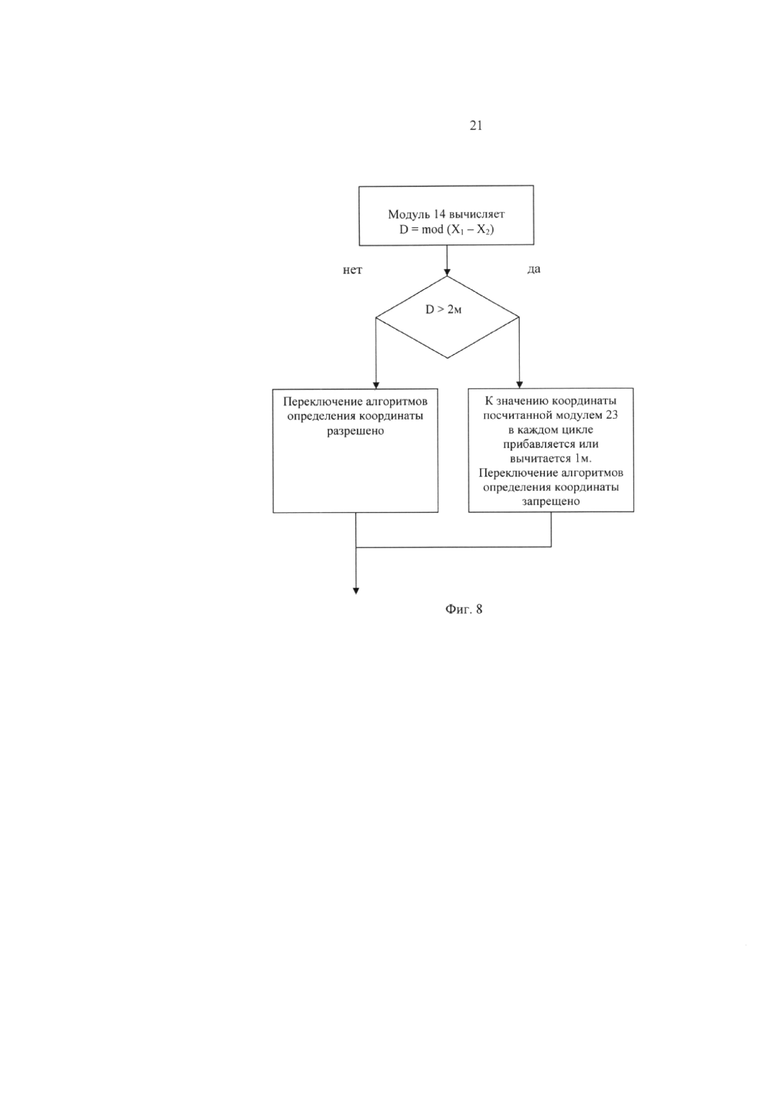
В переходном алгоритме, приведенном на фиг.8, при каждом новом измерении координаты по данным модуля 16 навигационного приемника координата, рассчитанная по данным от блока 2 датчиков импульсов, получает в алгоритме поправку, например на 1 м, в сторону уменьшения разницы D. Здесь в приведенной формуле буквой D обозначена абсолютная величина разницы между координатой X1, рассчитанной по числу импульсов от блока 2 датчиков импульсов, и координатой Х2, измеренной на основе данных от модуля 16 навигационного приемника.
Модуль 23 корректирования координаты разрешает переход на фиг.2 с одного алгоритма на другой после прохождения граничной скорости Vmin и только, если D не превышает некоторой выбранной нормы (например, 2 м).
Дальнейшее снижение вероятности ложных экстренных торможений поезда из-за ошибочного отнесения координат остановки головы поезда к координатам за светофором с запрещающим сигнальным показанием обеспечивается работой модуля 24 фиксации моментов времени резкого изменения амплитуды сигналов АЛС в приемных катушках локомотива и модуля 25 фиксации моментов времени смены длительности кодового цикла сигналов АЛС числового кода, принимаемых приемными катушками локомотива.
Сигналы АЛС из приемных катушек локомотива поступают в блок 26 интерфейса согласования с приемными катушками локомотива, где осуществляется преобразование посредством масштабирования по уровню, фильтрации и оцифровки для дальнейшей интеллектуальной обработки модулями 24, 25. Модуль 24 фиксирует интервалы времени проследования головой поезда над формирователями кодовых сигналов АЛС неограниченных рельсовых цепей тональной частоты, по резкому нарастанию уровня сигналов АЛС в приемных катушках. Размещение формирователей кодовых сигналов АЛС перед началом следующих рельсовых цепей позволяет модулю 24 при последующем по времени прекращении приема кода КЖ, после вступления поезда на занятую рельсовую цепь за светофором с запрещающим сигнальным показанием, надежно определить, имела ли место обязательная остановка поезда в пределах последних 200 м перед светофором с запрещающим сигнальным показанием, и тем самым надежно определить факт выполнения условий, необходимых для предотвращения ложного экстренного торможения после этого светофора, с посылкой соответствующего информационного сообщения через CAN интерфейс микрокомпьютеру 17. Модуль 25 фиксирует моменты времени проследования головой поезда изолирующих стыков рельсовых цепей с изолирующими стыками. Признаком прохождения изолирующих стыков является либо смена длительности кодового цикла принимаемых сигналов АЛС числового кода (из-за чередования типов кодовых трансмиттеров КПТ-5, КПТ-7 в смежных рельсовых цепях) во время прохождения локомотивных катушек над рельсами в области изолирующих стыков, либо является смена длительности кодового цикла принимаемых сигналов АЛС числового кода, либо прекращение приема кода КЖ после вступления поезда на занятую рельсовую цепь за светофором с запрещающим сигнальным показанием.
То, что длительность кодового цикла сигнала КЖ во время остановки поезда перед светофором с запрещающим сигнальным показанием и во время последующего после остановки движения поезда в пределах 200 м перед этим светофором не изменялась, позволяет модулю 25 надежно определить факт выполнения условий, необходимых для предотвращения ложного экстренного торможения после светофора, с посылкой соответствующего информационного сообщения через CAN интерфейс микрокомпьютеру 17.
Микрокомпьютер 17 использует информацию, передаваемую в него модулями 24 и 25 о том, что они зафиксировали остановку локомотива перед проследованием локомотивом светофора с запрещающим сигнальным показанием для предотвращения ложного экстренного торможения, не взирая на временные сбои в работе подсистем измерения координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БОРТОВОЙ АППАРАТУРЫ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411153C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| УСТРОЙСТВО ИНТЕЛЛЕКТУАЛЬНОЙ БОРТОВОЙ АППАРАТУРЫ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2487035C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| Устройство для управления движением поезда | 2021 |
|
RU2765515C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
Изобретение относится к области железнодорожной автоматики телемеханики и связи для управления локомотивами. Устройство содержит бортовой контроллер и связанные с ним блок датчиков импульсов, локомотивный датчик давления, антенну радиоканала и радиомодем, соединенные с бортовым контроллером спутниковую антенну, блок индикации, блок управления, блок переключателей, который соединен с переключателем кабины, рукояткой бдительности машиниста и электропневматическим клапаном, и блок исполнительных цепей. Причем бортовой контроллер включает модуль вычислителя скорости движения, CAN шину, модуль корректирования координаты, модуль измерителя датчиков давления, модуль навигационного приемника, микрокомпьютер, модуль контроля и управления, модуль контроля, формирователь безопасного напряжения, CAN мост для связи с внешними устройствами и дополнительно введенные модуль фиксации моментов времени резкого изменения амплитуды сигналов АЛС в приемных катушках локомотива и модуль фиксации моментов времени смены длительности кодового цикла сигналов АЛС числового кода, принимаемых приемными катушками локомотива. Достигается снижение ложных экстренных торможений поезда. 8 ил.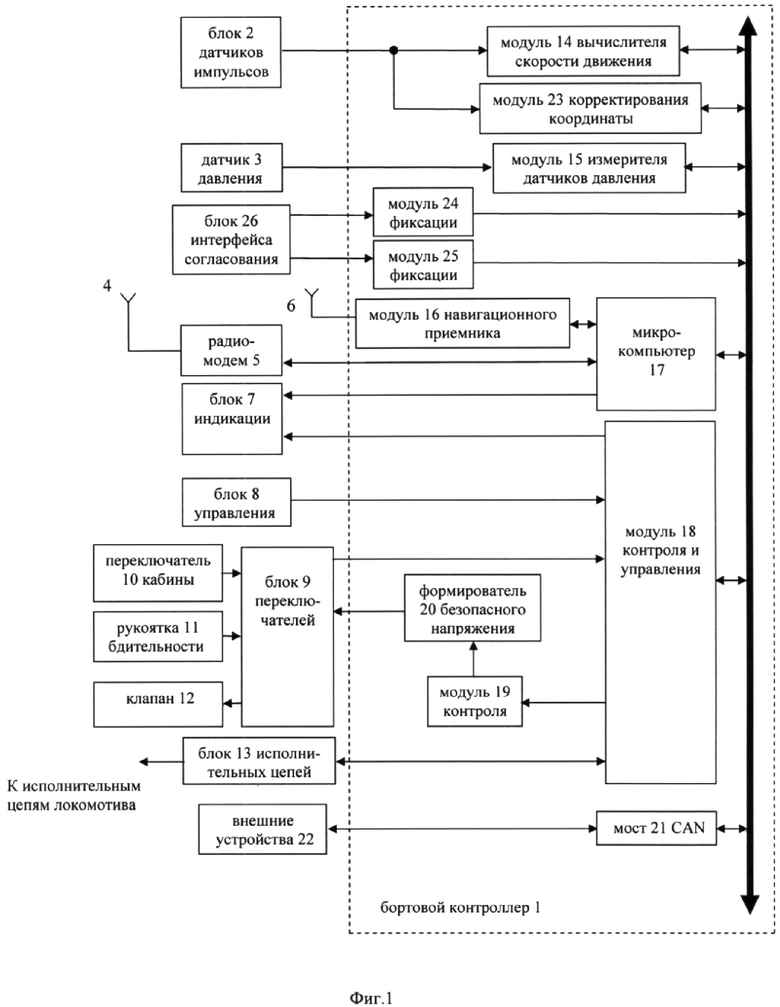
Устройство бортовой аппаратуры автоматической локомотивной сигнализации, содержащее бортовой контроллер и связанные с ним блок датчиков импульсов, локомотивный датчик давления, последовательно соединенные антенну радиоканала и радиомодем, соединенные с бортовым контроллером спутниковую антенну, блок индикации, блок управления, блок переключателей, который соединен с переключателем кабины, рукояткой бдительности машиниста и электропневматическим клапаном, и блок исполнительных цепей, причем бортовой контроллер содержит модуль вычислителя скорости движения, вход которого соединен с выходом блока датчиков импульсов, к которому подключен вход модуля корректирования координаты, модуль измерителя датчиков давления, вход которого соединен с локомотивным датчиком давления, модуль навигационного приемника, вход которого соединен со спутниковой антенной, а выход - с первым портом микрокомпьютера, второй порт которого соединен с радиомодемом, третий порт соединен с первым входом блока индикации, второй вход которого соединен с первым выходом модуля контроля и управления, первый вход которого соединен с выходом блока управления, а второй выход - через модуль контроля и формирователь безопасного напряжения соединен с первым входом блока переключателей, выход которого соединен со вторым входом модуля контроля и управления, первый порт которого через первую шину внешнего интерфейса CAN соединен с блоком исполнительных цепей, предназначенным для подключения к исполнительным цепям локомотива, мост CAN своим первым портом через вторую шину внешнего интерфейса CAN соединен с внешними устройствами, а вторым портом соединен через внутреннюю общую шину интерфейса CAN с модулем контроля и управления, с микрокомпьютером, модулем измерителя датчиков давления, модулем вычислителя скорости движения и модулем корректирования координаты, отличающееся тем, что оно снабжено блоком интерфейса согласования с приемными катушками локомотива, а в бортовой контроллер введены модуль фиксации моментов времени резкого изменения амплитуды сигналов АЛС в приемных катушках локомотива и модуль фиксации моментов времени смены длительности кодового цикла сигналов АЛС числового кода, принимаемых приемными катушками локомотива, при этом порты модулей соединены с внутренней общей шиной интерфейса CAN, а их входы подключены соответственно к первому и второму выходам блока интерфейса согласования с приемными катушками локомотива.
| УСТРОЙСТВО БОРТОВОЙ АППАРАТУРЫ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411153C1 |
| Способ получения искусственных смол | 1952 |
|
SU98388A1 |
| УСТРОЙСТВО РЕГИСТРАЦИИ СИГНАЛОВ И ПАРАМЕТРОВ КОДОВ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ НЕПРЕРЫВНОГО ДЕЙСТВИЯ (АЛСН) | 2006 |
|
RU2317589C1 |
| Устройство подавления импульсных помех на входе локомотивного приемника АЛС | 2015 |
|
RU2618616C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОЛУПРОВОДНИКОВЫХ ПЛЕНОК НА ОСНОВЕ ГЕРМАНИЯ | 0 |
|
SU165420A1 |

