Изобретение относится к области машиностроения, касается роторно-лопастных двигателей внутреннего сгорания и может быть использовано при создании объемных насосов и компрессоров.
Известна роторная машина [1], содержащая корпус в виде цилиндра с торцевыми крышками, роторы с коаксиальными валами и закрепленными на них лопастями, образующими рабочие камеры, выходной вал с маховиком, плоский шарнирный механизм, образованный рычагами на коаксиальных валах и тягами, шарнирно соединенными с маховиком. Выходной вал роторной машины установлен эксцентрично по отношению к коаксиальным валам.
Недостатком роторной машины является неравномерность движения роторов, обусловленная кинематикой плоского шарнирного механизма.
Наиболее близким к заявляемому объекту устройством является «механизм для преобразования движения» [2], взятый в качестве прототипа. Известный механизм содержит корпус в виде цилиндра с торцевыми крышками, внутри которого размещены два коаксиальных вала с рычагами, соединенные тягами в плоский четырехзвенный механизм, выходной вал с маховиком, в радиальных пазах которого перемещаются ползуны в виде пальцев четырехзвенного механизма. Кинематическая связь между коаксиальными валами, совершающими возвратно-вращательное движение, и равномерно вращающимся выходным валом осуществляется путем контакта пальцев с кулачком, закрепленным на корпусе.
Недостатком известного устройства является его сложность, обусловленная наличием большого количества связей, а также кулачка, требующего высокой точности изготовления и сборки.
Целью данного изобретения является упрощение конструкции.
Поставленная цель достигается тем, что кинематическая связь между ползуном и выходным валом осуществляется с помощью кривошипно-шатунного механизма, шатун которого шарнирно связан с ползуном, а кривошип установлен соосно с выходным валом и кинематически связан с ним посредством размещенной на корпусе механической передачи. На маховике размещены осесимметрично несколько ползунов со всеми связями, а кривошип выполнен в виде коленчатого вала. Коаксиальные валы (роторы) снабжены ограничителями сближения друг с другом.
Суть изобретения поясняется чертежами.
На фиг.1 схематично изображен общий вид роторно-лопастного двигателя внутреннего сгорания с двумя роторами в продольном разрезе.
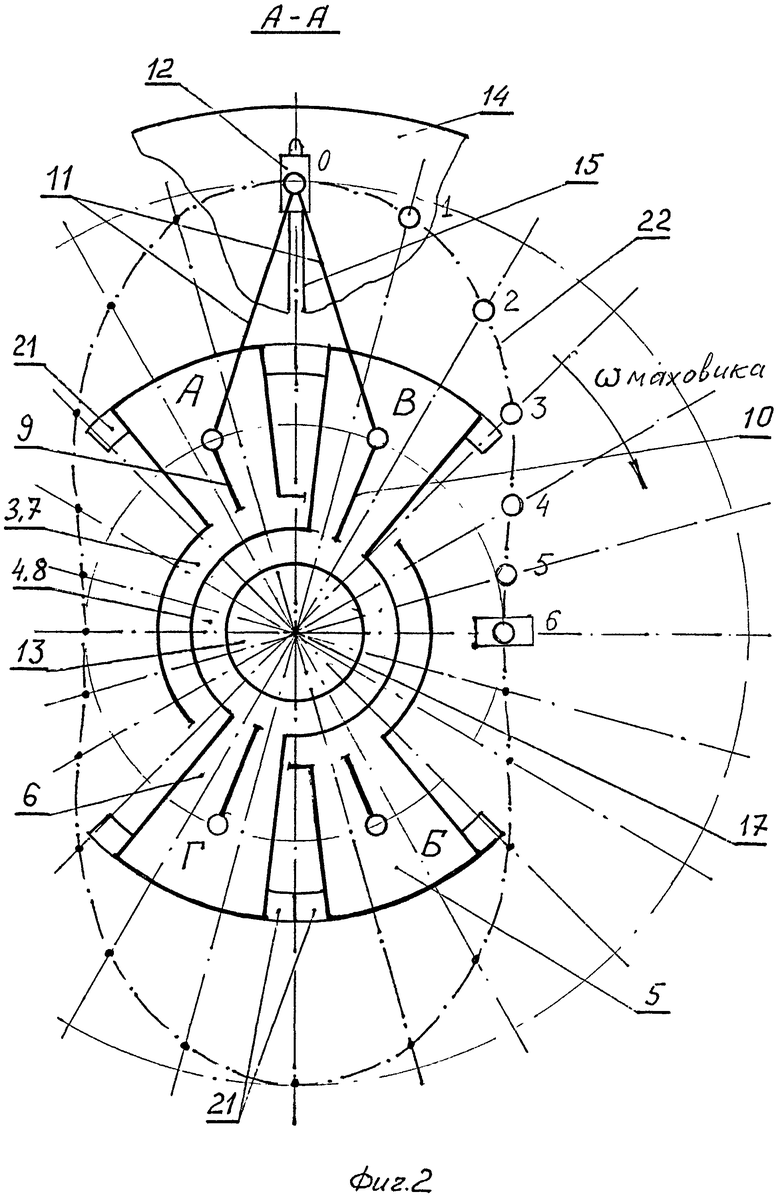
На фиг.2 изображено поперечное сечение А-А фиг.1 двигателя с двумя роторами, каждый из которых снабжен двумя лопастями. Вид со стороны роторов с четырехзвенным механизмом и траекторией движения ползуна.
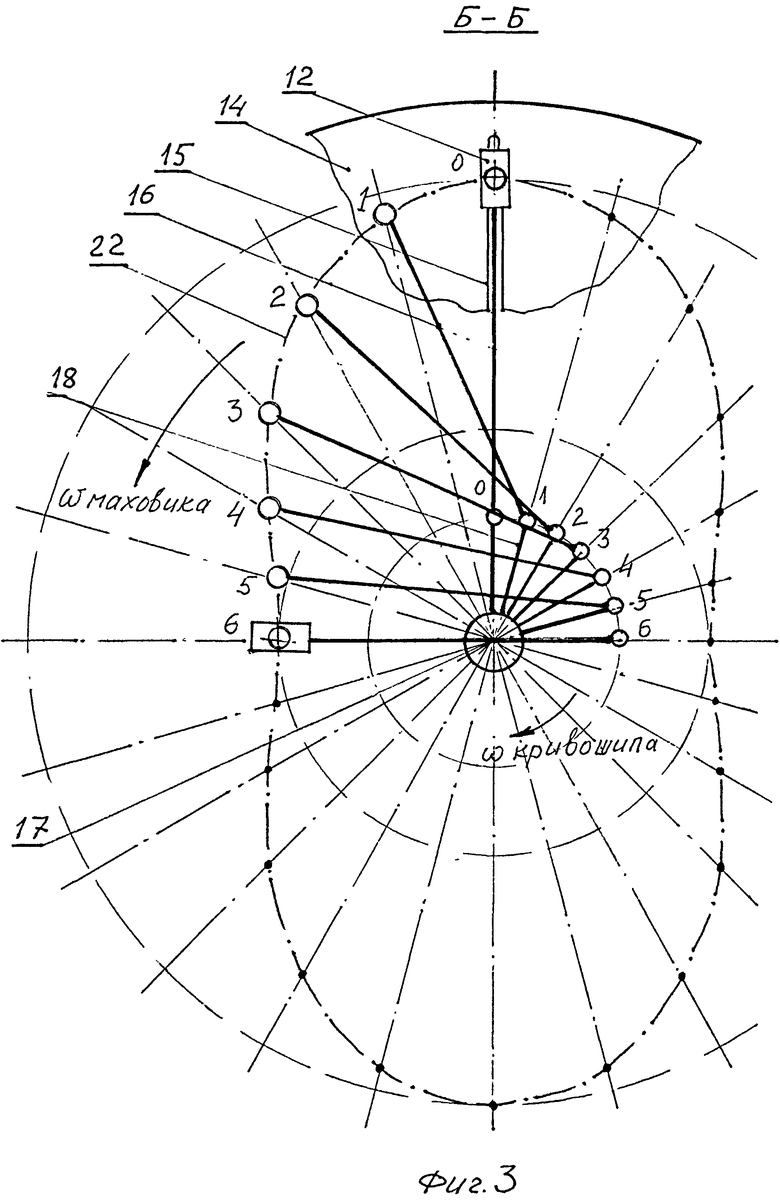
На фиг.3 - поперечное сечение Б-Б фиг.1, вид со стороны кривошипно-шатунного механизма в нескольких его положениях и траекторией движения ползуна для двигателя с двухлопастными роторами.
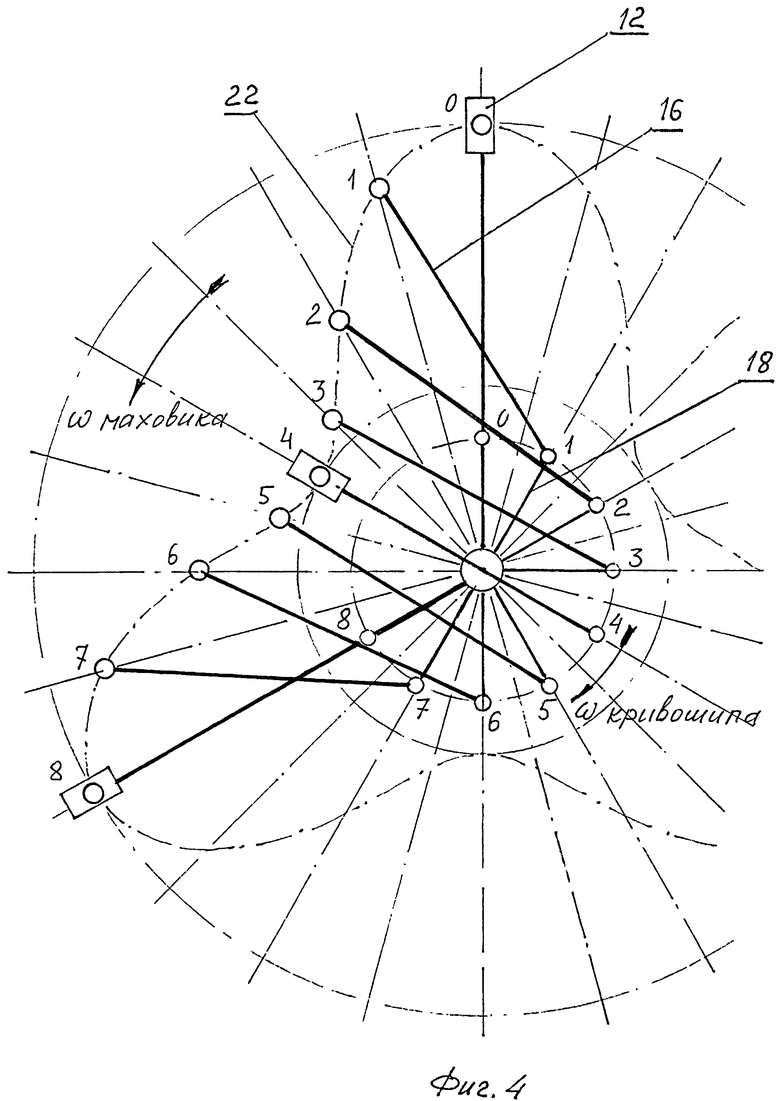
На фиг.4 изображена траектория движения ползуна для двухроторного двигателя с тремя лопастями на каждом роторе.
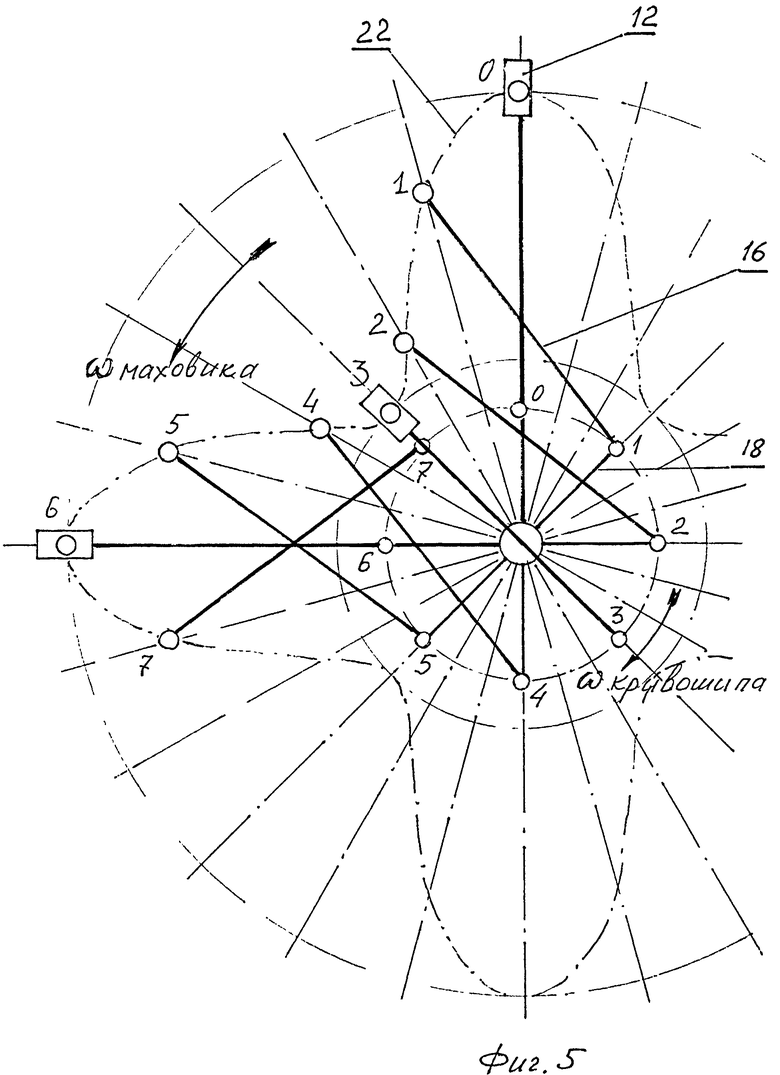
На фиг.5 изображена траектория движения ползуна для двухроторного двигателя с четырьмя лопастями на каждом роторе.
Роторно-лопастной двигатель внутреннего сгорания с двумя роторами, каждый из которых снабжен двумя лопастями, состоит из корпуса в виде цилиндра 1 с торцевыми крышками 2, внутри которого помещены роторы 3 и 4, с лопастями 5 - А и Б, и 6 - В и Г на фиг.2. Роторы присоединены к выходящим за пределы корпуса коаксиальным валам 7 и 8, оканчивающимся рычагами 9 и 10, которые совместно с тягами 11 образуют плоский четырехзвенный механизм, причем его внешний шарнир присоединен к ползуну 12. Внутри коаксиальных валов концентрично размещен выходной вал 13 с закрепленным на его конце маховиком 14, в радиальном пазу 15 которого размещен ползун 12. Кривошипно-шатунный механизм состоит из шатуна 16, шарнирно присоединенного к ползуну 12 с другой стороны маховика от четырехзвенного механизма, а ось 17 кривошипа 18 размещена соосно с выходным валом 13 и связана с ним кинематической цепью 20 при помощи механической передачи размещенной на корпусе. Кинематическая цепь может быть выполнена в виде ременной, цепной или иной известной передачи, либо редуктора (мультипликатора) и включает механизм реверса (поз.19 на фиг.1). Диаметр описываемой кривошипом 18 окружности равен длине хода ползуна 12 между верхней и нижней мертвыми точками - ВМТ и НМТ. Ход ползуна определяется двумя крайними взаимными положениями лопастей: попарным сближением; ограниченным упорами 21, гарантирующими заданный объем камеры сгорания, и расхождением, определенным конструкцией двигателя в зависимости от заданной степени сжатия. Роторы 3 и 4 двигателя могут быть снабжены двумя и более лопастями каждый.
Роторно-лопастной двигатель внутреннего сгорания с двумя роторами, каждый из которых снабжен двумя лопастями, работает по четырехтактному циклу следующим образом.
Два ротора 3 и 4 с двумя лопастями каждый 5 - А и Б и 6 - В и Г, связанные четырехзвенным механизмом, образованным рычагами 9, 10 и тягами 11, с ползуном 12, маховиком 14 и выходным валом 13 образуют Систему, равномерно вращающуюся в корпусе. Лопасти А, Б, В, Г роторов делят объем, заключенный в корпусе, на четыре камеры, в которых одновременно происходят все четыре такта. Внутри Системы происходят относительные, симметричные по отношению к маховику 14 и выходному валу 13, возвратно-вращательные движения роторов 3 и 4, т.е. лопастей, последовательно изменяющие объем камер от минимального - объема камеры сгорания, обеспеченного попарным сближением лопастей до упоров 21 (лопасти А и В в точке 0 на фиг.2), где осуществляется процесс зажигания рабочей смеси, до максимального - объема камеры рабочего хода, обусловленного конструкцией (лопасти В и Б). Это происходит под воздействием четырехзвенного механизма, которым управляет через ползун 12 кривошипно-шатунный механизм, приводимый от выходного вала 13 через механическую передачу 19, 20. Передаточное отношение механической передачи в общем случае определяется по формуле:
Где 180° - половина оборота выходного вала 13;
i - передаточное отношение оси 17 кривошипа к выходному валу 13;
φ - угол поворота выходного вала 13, соответствующий одному ходу ползуна 12;
«-» знак, показывающий противоположное направление вращения оси 17 и выходного вала 13.
В четырехтактном двигателе с двумя двухлопастными роторами рабочий такт происходит при каждом повороте маховика 14 (выходного вала 13) на четверть оборота, при одном ходе ползуна - от ВМТ до НМТ или обратно, то есть φ=90°, что соответствует передаточному отношению механической передачи 19, 20 
Для двухроторного двигателя с тремя лопастями на каждом роторе - фиг.4 - φ=60°, i=-1:2
для двухроторного двигателя с четырьмя лопастями на каждом роторе - фиг.5 - φ=45°, i=-1:3.
Кривошипно-шатунный механизм выполняет силовую функцию (сжатие) только при запуске двигателя. На работающем двигателе его функция сводится к координации Системы относительно корпуса для обеспечения момента зажигания. Динамика рабочего процесса двигателя, зависимость активных и инерционных сил и моментов, соотношение полезной работы и внутренних затрат энергии саморегулируются, взаимные крайние относительные положения лопастей 5 и 6 фиксируются упорами 21.
Для работы двухроторного двигателя с четырьмя лопастями достаточно наличия одного четырехзвенного механизма и одного ползуна. Однако для полной балансировки и силового замыкания кинематических цепей целесообразно установить два или более осесимметричных механизмов. Кривошип в этом случае приобретет вид коленчатого вала.
Роторно-лопастной ДВС с двумя роторами может иметь на каждом роторе более двух лопастей. На фиг.4 показана траектория движения ползуна для трехлопастного двигателя, а на фиг.5 - для четырехлопастного. При этом нечетное количество лопастей позволяет создать ДВС, работающий по двухтактному циклу, а четное - по любому циклу. Оба варианта пригодны для создания объемных гидро- и пневмомашин.
Предлагаемая конструктивная схема двигателя внутреннего сгорания обладает существенной простотой - наличием только элементарных кинематических пар при сохранении плавности и гармоничности движения наиболее нагруженных деталей, обусловленных кинематикой механической передачи, содержащей только вращающиеся звенья, а также отсутствием суровых требований к точности деталей.
Источники информации
1. Патент РФ №2135777, «Роторная машина», МПК F01C 1/063.
2. Патент РФ №2374526 С2, «Механизм для преобразования движения», МПК F16H 25/04.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-лопастной двигатель внутреннего сгорания "БО" | 2023 |
|
RU2802108C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЯРИМОВА | 1992 |
|
RU2062893C1 |
| ЛОПАСТНОЙ ДВИГАТЕЛЬ | 2018 |
|
RU2697779C1 |
| Лопастной двигатель внутреннего сгорания | 2017 |
|
RU2659602C1 |
| Роторно-лопастной двигатель внутреннего сгорания "БО-2" | 2024 |
|
RU2834634C1 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ "БО-3" | 2023 |
|
RU2830532C1 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2020 |
|
RU2739300C1 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ И МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНО-УГЛОВЫХ ДВИЖЕНИЙ РОТАРА ВО ВРАЩЕНИЕ ВЫХОДНОГО ВАЛА | 2007 |
|
RU2362883C2 |
| ЛОПАСТНОЙ ДВИГАТЕЛЬ | 2018 |
|
RU2700108C1 |
| РОТОРНАЯ МАШИНА | 2004 |
|
RU2260697C1 |
Изобретение относится к машиностроению. Роторно-лопастной двигатель внутреннего сгорания содержит корпус в виде цилиндра с торцевыми крышками и размещенные внутри корпуса роторы с лопастями и выходящими из корпуса коаксиальными валами. На коаксиальных валах закреплены рычаги, соединенные посредством тяг в четырехзвенный механизм. Четырехзвенный механизм шарнирно связан с ползуном. Ползун помещен в радиальном пазу маховика. Маховик жестко связан с выходным валом. Выходной вал соосен с коаксиальными валами и кинематически связан с ползуном и с корпусом. Кинематическая связь выполнена в виде кривошипно-шатунного механизма. Шатун кривошипно-шатунного механизма шарнирно соединен с ползуном. Кривошип соосен с выходным валом и связан с ним размещенной на корпусе механической передачей. На маховике помещены осесимметрично несколько ползунов со всеми связями. Кривошип выполнен в виде коленчатого вала. Роторы снабжены ограничителями сближения лопастей. Изобретение направлено на упрощение конструкции двигателя. 2 з.п.ф-лы, 5 ил.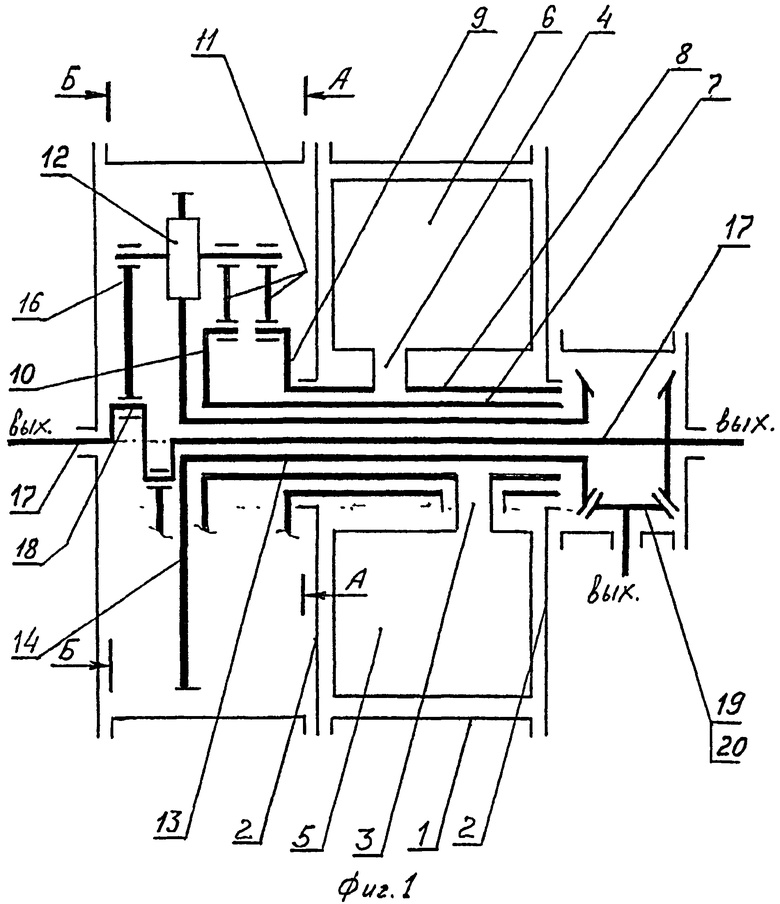
1. Роторно-лопастной двигатель внутреннего сгорания, содержащий корпус в виде цилиндра с торцевыми крышками, размещенные внутри корпуса роторы с лопастями и выходящими из корпуса коаксиальными валами, закрепленные на коаксиальных валах рычаги, соединенные посредством тяг в четырехзвенный механизм, шарнирно связанный с ползуном, помещенным в радиальном пазу маховика, жестко связанного с выходным валом, соосным с коаксиальными валами и кинематически связанным с ползуном и с корпусом, отличающийся тем, что, с целью упрощения конструкции, кинематическая связь выполнена в виде кривошипно-шатунного механизма, шатун которого шарнирно соединен с ползуном, а кривошип соосен с выходным валом и связан с ним размещенной на корпусе механической передачей.
2. Роторно-лопастной двигатель по п.1, отличающийся тем, что на маховике помещены осесимметрично несколько ползунов со всеми связями, а кривошип выполнен в виде коленчатого вала.
3. Роторно-лопастной двигатель по п.1, отличающийся тем, что роторы снабжены ограничителями сближения лопастей.
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2374526C2 |
| РОТОРНАЯ МАШИНА | 1997 |
|
RU2135777C1 |
| Хон для обработки цилиндрических отверстий | 1983 |
|
SU1155429A1 |
| Клапан для преобразования давления жидкости | 1958 |
|
SU119839A1 |

