Изобретение относится к точному приборостроению, в частности к приводам микроманипуляторов, и может быть использовано для значительного перемещения объектов с высокоточным позиционированием и с приложением значительных усилий.
Известен привод перемещения объектов, который выполнен в виде пьезонасоса, состоящего из пьезоэлемента, выполненного деформируемым и подвижным и регулируемым с помощью винта, двух эластичных элементов конструкции, двух каналов пьезонасоса, снабженных двумя стаканами, расположенными в них двумя клапанами, каждый из которых представляет собой пьезокристалл, цилиндра с поршнем и рабочей жидкости, причем каналы соединены с полостью цилиндра, а к поршню прикреплен перемещаемый объект (RU 2175601 [1]).
Недостатком известного устройства является невозможность создания больших усилий. Это обусловлено как самой конструкцией гидроцилиндра (двухполостной), так и конструктивных элементов пьезонасоса. Перекачка жидкости осуществляется за счет деформации эластичных элементов, поэтому создать высокое давление в рабочих объемах не представляется возможным.
Известны силовые магнитострикционные нанопозиционеры, позволяющие осуществлять сверхточное (дискретный шаг позиционирования до 0,01 нм) позиционирование со значительными (до нескольких тонн) усилиями на значительной (до 1 м) базе (V.I.Rakhovsky, «Super-precise nanopositioners for nanotechnology», Proc. of the International Workshop on Micro Robots, Micro Machines and Micro Systems, Moscow, p.115, 2003 [2]). Однако использование этих позиционеров осложняется тем, что конструктивно они являются двухступенчатыми, причем точная ступень допускает перемещение только в диапазоне длин 10-50 мкм. Эта особенность ограничивает их применение во многих приложениях, где требуется позиционирование с высокой точностью на достаточно протяженной базе без перехода от одной ступени перемещения к другой с сохранением высокоточного силового позиционирования.
Наиболее близким по технической сущности и достигаемому результату к заявленному является устройство для точного позиционирования, содержащее два сообщающихся сосуда различного сечения, заполненные жидкостью и герметически закрытые подвижными поршнями. Устройство для точного позиционирования содержит привод, создающий усилие на одном из поршней, в качестве которого используется расширяющийся магнитостриктор (RU 2279755 [3])
Недостатком известного устройства является его недостаточно высокая точность позиционирования, необходимая для целого ряда применений в нанотехнологиях при сохранении возможности перемещения на значительное расстояние с весьма высоким линейным разрешением и большими усилиями.
Заявляемое устройство направлено на повышение точности позиционирования.
Указанный результат достигается тем, что устройство для точного позиционирования содержит два сообщающихся сосуда различного сечения, заполненные жидкостью и герметически закрытые подвижными поршнями и привод, создающий усилие на одном из поршней, при этом, по крайней мере один из сосудов снабжен по крайней мере одним средством изменения его подпоршневого объема, выполненным в виде перемещаемого внутрь его сильфона или мембраны малого диаметра, размещенных в его стенке или поршне.
Указанный результат достигается так же тем, что привод, создающий усилие на одном из поршней, выполнен в виде магнитостриктора.
Указанный результат достигается так же тем, что привод, создающий усилие на одном из поршней, выполнен в виде пьезоэлемента.
Указанный результат достигается так же тем, что привод перемещения мембраны малого диаметра выполнен в виде магнитостриктора.
Указанный результат достигается так же тем, что привод перемещения мембраны малого диаметра выполнен в виде пьезоэлемента.
Указанный результат достигается так же тем, что привод перемещения сильфона выполнен в виде магнитостриктора.
Указанный результат достигается так же тем, что привод перемещения сильфона выполнен в виде пьезоэлемента.
Поскольку величины перемещений поршней в сосудах большого и меньшего диаметров обратно пропорциональны квадрату отношения их диаметров, то выполнение устройства для точного позиционирования в виде двух сообщающихся сосудов различного сечения, заполненными жидкостью и герметически закрытыми подвижными поршнями позволяет обеспечить непрерывное перемещение поршня в сосуде меньшего диаметра на значительное расстояние с достижением значительных усилий, прикладываемых к объекту перемещения и с линейным разрешением, определяемым в свою очередь перемещением поршня большого диаметра. Поскольку даже при незначительных перемещениях поршня большого диаметра, поршень меньшего диаметра будет перемещаться на значительно большие расстояния, чем поршень большого диаметра, то для обеспечения прецизионных перемещений поршня меньшего диаметра необходимо осуществлять незначительные изменения объема их общего подпоршневого пространства. Для этого известное устройство и снабжается (по крайней мере один из сосудов) по крайней мере одним средством изменения его подпоршневого объема. При этом не существенно, где это средство размещено - в стенках сосудов или в самих поршнях. При наличии такого дополнения к известному устройству, выбранному в качестве прототипа, могут быть существенно снижены требования к точности позиционирования поршней за счет их перемещения, а значит, в качестве привода их перемещения может быть выбран любой из числа известных. Но наиболее целесообразно использовать привод, создающий усилие на одном из поршней в виде магнитостриктора или пьезоэлемента, поскольку они обладают большим КПД преобразования электрической энергии в механическую и могут обеспечить большие усилия с высокой точность позиционирования.
Средство изменения подпоршневого объема сосуда может быть выбрано любым из числа известных. Например, в виде дополнительного поршня с соответствующим приводом его перемещения в одной из боковых стенок сосуда. Однако в этом случае будет необходимо решать проблему уплотнения поршня, т.к. при создании больших усилий в сосуде будет высокое давление. Поэтому представляется целесообразным выполнять средство изменения подпоршневого объема сосуда в виде размещенной в его стенке или поршне мембраны малого диаметра или в виде перемещаемого внутрь объема сосуда сильфона, размещенного в стенке сосуда или поршне. Для того чтобы расширить диапазон микроперемещений, средство изменения подпоршневого объема сосуда может быть выполнено в виде размещенного в его стенке или поршне набора из нескольких мембран различного или одинакового диаметра или в виде набора из нескольких сильфонов различного или одинакового размера. Приводы перемещения мембран и сильфонов могут быть выбраны любыми из числа известных. Но наиболее целесообразно использовать приводы в виде магнитостриктора или пьезоэлемента, поскольку они, как указывалось выше, обладают большим КПД преобразования электрической энергии в механическую и могут обеспечить большие усилия с высокой точность позиционирования. А учитывая наличие высокого давления в пространстве между поршнями, это становится весьма существенным их преимуществом.
Сущность изобретения поясняется чертежом и примером его реализации.
На чертеже схематично представлена функциональная схема устройства для точного позиционирования.
Устройство содержит два сообщающихся сосуда 1 и 2 с сильно различающимися сечениями, заполненные жидкостью 3. Каждый из сосудов закрыт поршнем соответствующего сечения 4. К одному из поршней (на чертеже показан вариант использования поршня большого сечения) присоединен привод (показан стрелкой), с помощью которого прикладывается усилие. Привод выбирается из числа известных, в том числе и из перечисленных в формуле изобретения. Шток второго поршня (на чертеже показан вариант использования для этой цели поршня меньшего сечения) соединен с перемещаемым объектом 5. В стенке сосудов (одного или обоих) устанавливается мембрана 6 или сильфон (одна или один или несколько) в качестве средства изменения подпоршневого объема. Средство изменения подпоршневого объема снабжается соответствующим приводом (показан стрелкой), который выбирается из числа известных, в том числе и из перечисленных в формуле изобретения.
Устройство функционирует следующим образом. С помощью привода перемещения к поршню 4 большого сечения прикладывается усилие, обеспечивающее его расчетное смещение. В результате происходит и расчетное смещение поршня 4 меньшего сечения, но на большее расстояние и с относительно невысокой точностью позиционирования. Для повышения точности позиционирования производят изменение подпоршневого объема сосудов 1 и 2, прикладывая с помощью соответствующих приводов усилие к средству изменения подпоршневого объема 6 (мембране или сильфону). В результате этого, при сохранении приложения усилия к поршню 4 большого сечения, происходит дополнительное смещение поршня 4 меньшего сечения. Учитывая, что изменения подпоршневого объема за счет прогиба внутрь мембран или введения сильфонов могут быть ничтожно малы, можно достичь сколь угодно малых величин смещений поршня 4 меньшего сечения. При этом, при совместном использовании привода перемещения поршня большого сечения и приводов нескольких мембран или сильфонов достигается неограниченная широта диапазонов смещений поршня 4 меньшего сечения с любой требуемой точностью и на значительные расстояния.
Изобретение относится к точному приборостроению, к приводам микроманипуляторов, и может быть использовано для значительного перемещения объектов с высокоточным позиционированием и с приложением значительных усилий. Технический результат состоит в повышении точности позиционирования. Устройство для точного позиционирования содержит два сообщающихся сосуда различного сечения, заполненные жидкостью и герметически закрытые подвижными поршнями, и привод, создающий усилие на одном из поршней. По крайней мере один из сосудов снабжен по крайней мере одним средством изменения его подпоршневого объема, выполненным в виде перемещаемого внутрь его сильфона или в виде размещенной в его стенке или поршне мембраны малого диаметра. Приводы, создающие усилие на одном из поршней, и для перемещения мембран и сильфонов выполнены в виде магнитостриктора или пьезоэлемента. 6 з.п. ф-лы, 1 ил.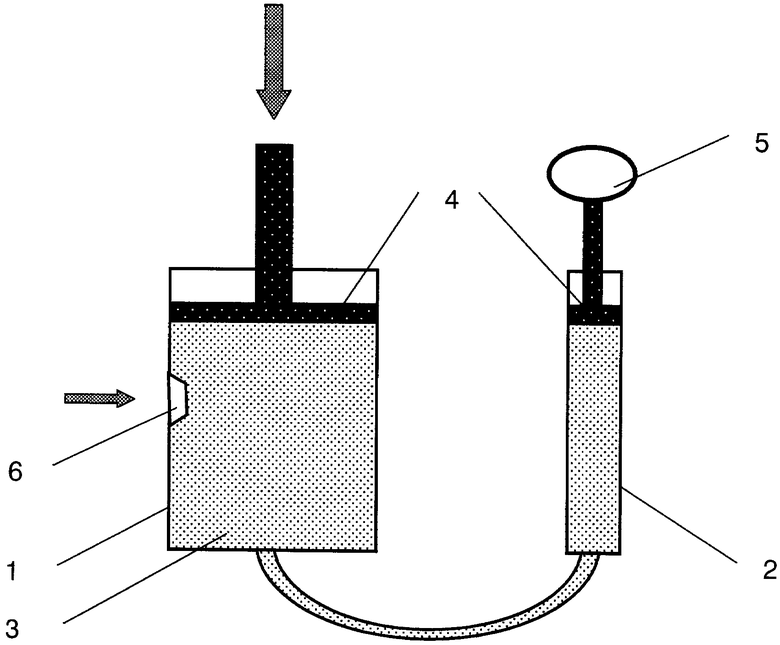
1. Устройство для точного позиционирования, содержащее два сообщающихся сосуда различного сечения, заполненных жидкостью и герметически закрытых подвижными поршнями, и привод, создающий усилие на одном из поршней, отличающееся тем, что по крайней мере один из сосудов снабжен по крайней мере одним средством изменения его подпоршневого объема, выполненным в виде перемещаемого внутрь его сильфона или мембраны, размещенных в его стенке или поршне.
2. Устройство по п.1, отличающееся тем, что привод, создающий усилие на одном из поршней, выполнен в виде магнитостриктора.
3. Устройство по п.1, отличающееся тем, что привод, создающий усилие на одном из поршней, выполнен в виде пьезоэлемента.
4. Устройство по п.1, отличающееся тем, что привод перемещения мембраны выполнен в виде магнитостриктора.
5. Устройство по п.1, отличающееся тем, что привод перемещения мембраны выполнен в виде пьезоэлемента.
6. Устройство по п.4, отличающееся тем, что привод перемещения сильфона выполнен в виде магнитостриктора.
7. Устройство по п.4, отличающееся тем, что привод перемещения сильфона выполнен в виде пьезоэлемента.
| ШИРОКОДИАПАЗОННОЕ УСТРОЙСТВО ДЛЯ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2004 |
|
RU2279755C2 |
| СВОБОДНОПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2018004C1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| RU 2000104168 А, 10.12.2001 | |||
| ВЕСОВОЙ ДАТЧИК | 0 |
|
SU179908A1 |
| Способ устранения собственних колебаний жидкости в сообщающихся сосудах | 1972 |
|
SU567858A1 |
| US 2005044851 A1, 03.03.2005 | |||
| DE 10120196 A1, 22.11.2001. | |||

