Предлагаемое изобретение относится к транспорту, в частности к автоматическим системам регулирования напряжения тяговых генераторов в электрических передачах автономных локомотивов при автоматизированном режиме ведения состава.
Известен способ регулирования напряжения тягового генератора тепловоза, заключающийся в том, что задают частоту вращения дизеля, приводящего во вращение генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки дизеля, соответствующее текущему значению скорости вращения его вала, измеряют напряжение тягового генератора, сравнивают его с величиной уставки и по величине рассогласования изменяют ток возбуждения генератора. С целью уменьшения расхода топлива при данной скорости вращения путем согласования свободной мощности дизеля и мощности, отбираемой тяговым генератором, задают положение дозирующего органа топливоподачи регулятора пропорционально заданной скорости вращения, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени и принимают за величину уставки напряжения тягового генератора (SU, А.с. №925693, кл. B60L 11/02, опубл. 1982).
Основным недостатком системы, реализованной по вышеуказанному способу, является то, что она не реализует автоматизированного управления движением тепловоза.
Известна автоматическая система регулирования напряжения тягового генератора тепловоза, содержащая тяговый генератор, к обмотке возбуждения которого подключен возбудитель, обмотка возбуждения которого подключена к амплистату, а обмотки управления которого подключены к селективному устройству, соединенному с трансформаторами постоянного тока и напряжения, к тахометрическому устройству (блоку задания возбуждения), к индуктивному датчику перемещения реек топливных насосов дизеля и к вторичной обмотке стабилизирующего трансформатора, первичная обмотка которого подключена к выходу возбудителя; трансформаторы постоянного тока и напряжения, рабочие обмотки амплистата и индуктивный датчик подключены к синхронному подвозбудителю посредством распределительного трансформатора. Такая система регулирования напряжения тягового генератора применена на тепловозах типа ТЭ10 (Тепловозы 2ТЭ10М и 3ТЭ10М: Устройство и работа. / С.П.Филонов, А.Е.Зиборов, В.В.Ренкунас и др. - М.: Транспорт, 1986, с.112-122; Луков Н.М., Стрекопытов В.В., Рудая К.И. Передачи мощности тепловозов. - М.: Транспорт, 1987, с.65-74; Луков Н.М. Автоматизация тепловозов, газотурбовозов и дизель-поездов. - М.: Машиностроение, 1988, с.76-118; Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989, с.160-179).
Недостатком указанной автоматической системы регулирования напряжения тягового генератора тепловоза является то, что она не обеспечивает режима автоматизированного ведения тепловоза с соблюдением графика движения и скоростных ограничений.
Известна автоматическая микропроцессорная система регулирования напряжения тягового генератора тепловоза, принятая за прототип, содержащая дизель, соединенный жесткой связью с тяговым генератором с образованием дизель-генератора, возбудитель, соединенный жесткой связью с дизелем, датчик напряжения тягового генератора, датчик тока нагрузки тягового генератора, датчик скорости вращения вала дизель-генератора, датчик подачи топлива, автоматический регулятор скорости вращения вала дизель-генератора, блок возбуждения возбудителя, изменяющий ток в обмотке возбуждения возбудителя, микропроцессорный контроллер, включающий в себя первое, второе, третье и четвертое задающие устройства, первое, второе, третье, четвертое и пятое сравнивающие устройства, выход датчика напряжения тягового генератора соединен с входом первого сравнивающего устройства, выход датчика тока нагрузки тягового генератора соединен с входом второго сравнивающего устройства, выход датчика скорости вращения вала дизель-генератора соединен с входом третьего сравнивающего устройства, выход датчика подачи топлива соединен с входом четвертого сравнивающего устройства, выходы первого, второго, третьего и четвертого задающих устройств соединены с входами первого, второго, третьего и четвертого сравнивающих устройств соответственно, выходы первого, второго, третьего и четвертого сравнивающих устройств соединены с входами пятого сравнивающего устройства, выход пятого сравнивающего устройства соединен с входом блока возбуждения возбудителя, содержащего датчик тока возбуждения возбудителя и датчик тока возбуждения тягового генератора, а микропроцессорный контроллер включает в себя первое и второе устройства коррекции, выход датчика тока возбуждения возбудителя соединен с входом первого устройства коррекции, выход датчика тока возбуждения тягового генератора соединен с входом второго устройства коррекции, а выходы первого и второго устройств коррекции соединены с входами пятого сравнивающего устройства, при этом статические характеристики разомкнутой системы подобраны с возможностью сохранения неизменным коэффициента передачи и соответствия его заданному значению при любых изменениях напряжения тягового генератора, тока тягового генератора, скорости вращения вала дизель-генератора и подачи топлива, что обеспечивает требуемые запасы устойчивости системы по модулю и фазе и заданные показатели качества ее работы - относительное перерегулирование и время регулирования при любых эксплуатационных режимах работы тягового тепловоза (RU, патент на изобретение №2290329 C1, кл. B60L 11/04, опубл. 2006).
Недостатком указанной автоматической системы регулирования напряжения тягового генератора тепловоза также является то, что она не обеспечивает режима автоматизированного ведения тепловоза с составом с соблюдением графика движения и скоростных ограничений.
Техническим результатом изобретения является обеспечение режима автоматизированного ведения состава с соблюдением графика движения и скоростных ограничений.
Указанный технический результат достигается тем, что в микропроцессорной системе регулирования напряжения тягового генератора тепловоза, содержащей дизель, соединенный жесткой связью с тяговым генератором с образованием дизель-генератора, возбудитель, соединенный жесткой связью с дизелем и с обмоткой возбуждения тягового генератора, датчик напряжения тягового генератора, датчик тока нагрузки тягового генератора, датчик скорости вращения вала дизель-генератора, датчик подачи топлива в дизель, соединенный с автоматическим регулятором скорости вращения вала дизель-генератора, блок возбуждения возбудителя, изменяющий ток в обмотке возбуждения возбудителя, микропроцессорный контроллер, включающий в себя первое и второе задающее устройство, первое, второе и третье сравнивающие устройства, блок управления пневматическим тормозом, блок расчета режимов движения и отображения оперативной информации, блок интерфейса, причем микропроцессорный контроллер дополнительно снабжен функциональным преобразователем, первым и вторым интеграторами, множительным устройством, логическим устройством и сумматором, причем функциональный преобразователь своим входом соединен с выходом датчика скорости вращения вала дизель-генератора, а выходами соединен соответственно с первым входом третьего сравнивающего устройства и первым входом сумматора, второй вход третьего сравнивающего устройства соединен с выходом датчика подачи топлива, а выход третьего сравнивающего устройства соединен с входом первого интегратора, соединенного своим выходом со вторым входом сумматора, выход сумматора соединен с первым входом первого сравнивающего устройства, второй вход которого соединен с выходом множительного устройства, а выход соединен с входом второго интегратора, при этом выход второго интегратора соединен с первым входом множительного устройства, первым входом второго сравнивающего устройства, второй вход множительного устройства соединен с выходом датчика тока нагрузки тягового генератора, а второй вход второго сравнивающего устройства соединен с выходом датчика напряжения тягового генератора, а выход второго сравнивающего устройства соединен с входом блока возбуждения возбудителя, а логическое устройство своими выходами соединено соответственно с входом автоматического регулятора скорости вращения вала дизель-генератора и с блоком управления пневматическим тормозом, второй, третий и четвертый входы логического устройства соединены соответственно с выходами первого и второго задающих устройств и с выходом блока расчета режимов движения и отображения оперативной информации, вход которого соединен с выходом блока интерфейса.
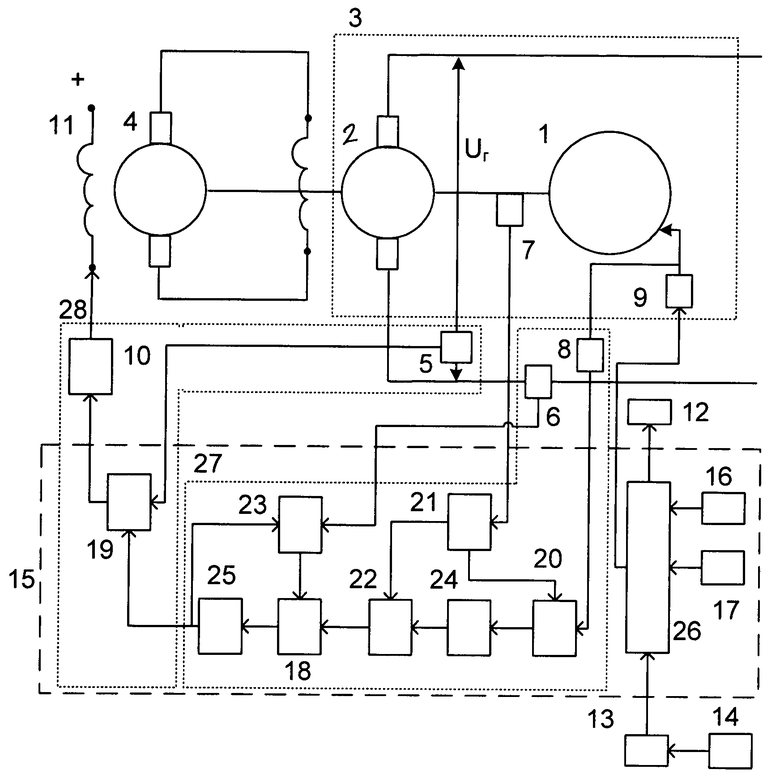
На чертеже изображена структурная схема предлагаемой микропроцессорной системы регулирования напряжения тягового генератора тепловоза.
Микропроцессорная система регулирования напряжения тягового генератора тепловоза содержит дизель 1, соединенный жесткой связью с тяговым генератором 2 с образованием дизель-генератора 3, возбудитель 4, соединенный жесткой связью с дизелем 1 и обмоткой возбуждения тягового генератора 2, датчик 5 напряжения тягового генератора 2, датчик 6 тока нагрузки тягового генератора 2, датчик 7 скорости вращения вала дизель-генератора 3, датчик 8 подачи топлива в дизель 1, соединенный с автоматическим регулятором 9 скорости вращения вала дизель-генератора 3, блок 10 возбуждения возбудителя 4, изменяющий ток в обмотке 11 возбуждения возбудителя 4, блок 12 управления пневматическим тормозом, блок 13 расчета режимов движения и отображения оперативной информации, блок 14 интерфейса, микропроцессорный контроллер 15, включающий в себя первое 16 и второе 17 задающее устройство, первое 18, второе 19 и третье 20 сравнивающие устройства, функциональный преобразователь 21, сумматор 22, множительное устройство 23, первый 24 и второй 25 интегратор, логическое устройство 26.
Датчик 8 подачи топлива, датчик 6 тока нагрузки тягового генератора 2, первое сравнивающее устройство 18, третье сравнивающее устройство 20, функциональный преобразователь 21, сумматор 22, множительное устройство 23, первый интегратор 24 и второй интегратор 25 образуют объединенный регулятор мощности 27 дизель-генератора 3, датчик 5 напряжения тягового генератора 2, блок 10 возбуждения возбудителя 4, второе сравнивающее устройство 19 образуют подчиненный объединенному регулятору мощности 27 регулятор напряжения 28 тягового генератора 2.
Функциональный преобразователь 21 своим входом соединен с выходом датчика 7 скорости вращения вала дизель-генератора 3, а выходами соединен соответственно с первым входом третьего сравнивающего устройства 20 и первым входом сумматора 22, второй вход третьего сравнивающего устройства 20 соединен с выходом датчика 8 подачи топлива, а выход третьего сравнивающего устройства 20 соединен с входом первого интегратора 24, соединенного своим выходом со вторым входом сумматора 22, выход сумматора 22 соединен с первым входом первого сравнивающего устройства 18, второй вход которого соединен с выходом множительного устройства 23, а выход соединен со входом второго интегратора 25, при этом выход второго интегратора 25 соединен с первым входом множительного устройства 23, первым входом второго сравнивающего устройства 19, второй вход множительного устройства 23 соединен с выходом датчика 6 тока нагрузки тягового генератора, а второй вход второго сравнивающего устройства 19 соединен с выходом датчика 5 напряжения тягового генератора 2, а выход второго сравнивающего устройства 19 соединен с входом блока 10 возбуждения возбудителя 4, а логическое устройство 26 своими выходами соединено соответственно с входом автоматического регулятора 9 скорости вращения вала дизель-генератора 3 и с блоком 12 управления пневматическим тормозом, второй, третий и четвертый входы логического устройства 26 соединены соответственно с выходами первого 16 и второго 17 задающих устройств и с выходом блока 13 расчета режимов движения и отображения оперативной информации, вход которого соединен с выходом блока 14 интерфейса.
Микропроцессорная система регулирования напряжения тягового генератора тепловоза работает следующим образом.
Первым задающим устройством 16 задается «автоматизированный» или «ручной» режимы работы тягового тепловоза, для чего соответствующий сигнал, например логический «0», соответствующий «ручному» режиму, с выхода первого задающего устройства 16 подается на первый вход логического устройства 26, при этом второе задающее устройство 17 в ручном режиме определяет задание скорости вращения вала дизель-генератора 3, для чего соответствующий сигнал подается с первого выхода логического устройства 26 на вход автоматического регулятора 9 скорости вращения вала дизель-генератора 3. При этом автоматический регулятор 9 скорости отрабатывает заданную скорость вращения вала дизель-генератора 3 соответствующим изменением подачи топлива, функциональный преобразователь 21 изменяет уставку мощности тягового генератора 2, соответствующий сигнал с первого выхода функционального преобразователя 21 является функцией скорости вращения вала дизель-генератора 3, сигнал с второго выхода функционального преобразователя 21 пропорционален уставке заданной подачи топлива в функции скорости вращения вала дизель-генератора 3. Сигнал на выходе сумматора 22 при этом будет определяться следующим выражением:
Рг∑=Ргω+∫(hзω-hи)dt,
где Рг∑ - суммарное задание мощности тягового генератора 2;
Ргω=f1(ωдг) - уставка мощности тягового генератора 2 в функции скорости вращения ωдг вала дизель-генератора 3;
∫(hзω-hи)dt - интеграл отклонения положения органа топливоподачи от уставки (сигнала на выходе третьего сравнивающего устройства 20);
hзω=f2(ωдг) - уставка положения органа топливоподачи в функции скорости вращения вала дизель-генератора 3;
hи - фактическое положение органа топливоподачи дизель-генератора 3 (сигнал с выхода датчика 8 подачи топлива).
Сигнал обратной связи по мощности тягового генератора 2, формируемый множительным устройством 23, определяется выходным сигналом второго интегратора 25, представляющим собой уставку напряжения тягового генератора 2, и измеренным датчиком 6 тока нагрузки тягового генератора 2. Это позволяет обеспечить необходимый запас устойчивости контура регулирования мощности тягового генератора 2, поскольку из обратной связи исключается запаздывание, обусловленное индуктивностями обмоток возбуждения возбудителя 4 и тягового генератора 2.
Для обеспечения объединенного регулирования дизель-генератора 3 и его работы по «экономической характеристике» в третьем сравнивающем устройстве 20 сравниваются уставка положения органа топливоподачи с сигналом с выхода датчика 8 подачи топлива, величина рассогласования интегрируется первым интегратором 24, результат интегрирования подается на второй вход сумматора 22, где суммируется с величиной уставки мощности тягового генератора 2, для чего сигнал, пропорциональный уставке мощности тягового генератора, с выхода функционального преобразователя 21 поступает на первый вход сумматора 22.
Выходной сигнал второго интегратора 25, входящего в состав объединенного регулятора мощности 27 (в соответствии с принципом подчиненного регулирования), определяет уставку напряжения для регулятора 28 напряжения тягового генератора 2, которая во втором сравнивающем устройстве 19 сравнивается с сигналом обратной связи по напряжению тягового генератора 2, поступающим с выхода датчика 5 напряжения тягового генератора 2, сигнал рассогласования с выхода второго сравнивающего устройства 19 поступает на вход блока 10 возбуждения возбудителя 4. В результате действия регулятора 28 напряжения ток возбуждения возбудителя 4 становится таким, чтобы обеспечить напряжение на выходе тягового генератора 2, соответствующее уставке напряжения на выходе второго интегратора 25 (на выходе объединенного регулятора 27 мощности).
Для работы микропроцессорной системы регулирования напряжения тягового генератора тепловоза в «автоматизированном» режиме ведения состава соответствующий сигнал логической «1» с выхода первого задающего устройства 16 подается на первый вход логического устройства 26, при этом задание скорости вращения вала дизель-генератора 3 определяется сигналом с выхода блока 13 расчета режимов движения и отображения оперативной информации, сигнал с выхода второго задающего устройства 17 при этом не учитывается. Для формирования сигнала задания режима работы тепловоза в «автоматизированном» режиме ведения состава блок 13 расчета режимов движения и отображения оперативной информации осуществляет расчет траектории движения на основании постоянных данных о графике движения, весе состава, количестве вагонов, ограничениях по скорости движения и профиле пути, а также данных о текущей координате, скорости движения, временных ограничениях скорости движения, сигналах светофоров, давлении воздуха в тормозной системе, получаемых через блок 14 интерфейса от бортовой системы обеспечения безопасности, например, КЛУБ-У (на чертеже не показано), после чего соответствующий сигнал подается с первого выхода логического устройства 26 на вход автоматического регулятора 9 скорости вращения вала дизель-генератора 3. Далее алгоритм работы микропроцессорной системы регулирования напряжения тягового генератора тепловоза в режиме тяги полностью соответствует «ручному» режиму ведения состава, описанному выше.
Для «автоматизированного» режима ведения состава необходимо обеспечить управление пневматическим тормозом состава в зависимости от условий движения (для осуществления регулировочных торможений или для остановки), для этого в микропроцессорной системе регулирования напряжения тягового генератора тепловоза предусмотрен блок 12 управления пневматическим тормозом, обеспечивающий режимы «Поездной», «Перекрыша», «Служебное торможение», «Торможение», «Отпуск тормозов» и «Сверхзарядка» включением и отключением соответствующих электропневматических клапанов (на чертеже не показаны), вход блока 12 управления пневматическим тормозом соединен со вторым выходом логического устройства 26. Задание режима торможения осуществляется соответствующим сигналом, поступающим на третий вход логического блока 26 с выхода блока 13 расчета режимов движения и отображения оперативной информации. Одновременно с этим с первого выхода логического устройства 26 подается соответствующий сигнал на вход автоматического регулятора 9 скорости вращения вала дизель-генератора 3, чем обеспечивается перевод объединенного регулятора мощности 27 дизель-генератора 3 в режим холостого хода (суммарное задание мощности тягового генератора 2 Рг∑=0).
В режиме тяги, когда суммарное задание мощности тягового генератора 2 Рг∑ отлично от 0, блок 12 управления пневматическим тормозом, соединенный своим входом со вторым выходом логического устройства 26, устанавливается в положение «Отпуск тормозов».
Микропроцессорная система регулирования напряжения тягового генератора тепловоза испытана на магистральных пассажирских и грузовых тепловозах с передачей постоянного тока и показала положительные результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЕПЛОВОЗА | 2013 |
|
RU2557853C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЕПЛОВОЗА | 2017 |
|
RU2658229C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2443579C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
| АВТОМАТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2290329C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2012 |
|
RU2481202C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423251C1 |
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2017 |
|
RU2653351C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2007 |
|
RU2350487C1 |
Предлагаемое изобретение относится к транспорту, в частности к электрическим передачам транспортных средств, и может быть применено для автономного тягового подвижного состава, в частности для тепловозов с электрической передачей постоянного тока. В микропроцессорной системе регулирования напряжения тягового генератора тепловоза содержится дизель, соединенный с тяговым генератором с образованием дизель-генератора, возбудитель, соединенный жесткой связью с дизелем, датчик напряжения тягового генератора, датчик тока нагрузки тягового генератора, датчик скорости вращения дизель-генератора, датчик подачи топлива в дизель. Микропроцессорный контроллер включает в себя первое и второе задающее устройство, первое, второе и третье сравнивающие устройства, блок управления пневматическим тормозом, блок расчета режимов движения и отображения оперативной информации, блок интерфейса, причем микропроцессорный контроллер снабжен функциональным преобразователем, который своим входом соединен с выходом датчика скорости вращения вала дизель-генератора, а выходами соединен соответственно с первым входом третьего сравнивающего устройства и первым входом сумматора, интегратора, соединенного своим выходом со вторым входом сумматора, выход сумматора соединен с первым входом первого сравнивающего устройства, второй вход которого соединен с выходом множительного устройства. Технический результат - в обеспечении режима автоматизированного ведения состава с соблюдением скоростных ограничений. 1 ил.
Микропроцессорная система регулирования напряжения тягового генератора тепловоза, содержащая дизель, соединенный жесткой связью с тяговым генератором с образованием дизель-генератора, возбудитель, соединенный жесткой связью с дизелем и с обмоткой возбуждения тягового генератора, датчик напряжения тягового генератора, датчик тока нагрузки тягового генератора, датчик скорости вращения вала дизель-генератора, датчик подачи топлива в дизель, соединенный с автоматическим регулятором скорости вращения вала дизель-генератора, блок возбуждения возбудителя, изменяющий ток в обмотке возбуждения возбудителя, микропроцессорный контроллер, включающий в себя первое и второе задающее устройство, первое, второе и третье сравнивающие устройства, отличающаяся тем, что она снабжена блоком управления пневматическим тормозом, блоком расчета режимов движения и отображения оперативной информации, блоком интерфейса, причем микропроцессорный контроллер дополнительно снабжен функциональным преобразователем, первым и вторым интеграторами, множительным устройством, логическим устройством и сумматором, причем функциональный преобразователь своим входом соединен с выходом датчика скорости вращения вала дизель-генератора, а выходами соединен соответственно с первым входом третьего сравнивающего устройства и первым входом сумматора, второй вход третьего сравнивающего устройства соединен с выходом датчика подачи топлива, а выход третьего сравнивающего устройства соединен с входом первого интегратора, соединенного своим выходом со вторым входом сумматора, выход сумматора соединен с первым входом первого сравнивающего устройства, второй вход которого соединен с выходом множительного устройства, а выход соединен с входом второго интегратора, при этом выход второго интегратора соединен с первым входом множительного устройства, первым входом второго сравнивающего устройства, второй вход множительного устройства соединен с выходом датчика тока нагрузки тягового генератора, а второй вход второго сравнивающего устройства соединен с выходом датчика напряжения тягового генератора, а выход второго сравнивающего устройства соединен с входом блока возбуждения возбудителя, а логическое устройство своими выходами соединено соответственно с входом автоматического регулятора скорости вращения вала дизель-генератора и с блоком управления пневматическим тормозом, второй, третий и четвертый входы логического устройства соединены соответственно с выходами первого и второго задающих устройств и с выходом блока расчета режимов движения и отображения оперативной информации, вход которого соединен с выходом блока интерфейса.
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182086C1 |
| АВТОМАТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2290329C1 |
| Устройство для стерилизации (пастеризации) продукта | 1973 |
|
SU443665A1 |
| US 4253399 A, 03.05.1981. | |||

