Изобретение относится к промышленным манипуляторам и может быть использовано в машиностроении для перемещения объектов, например, при обслуживании работы технологических машин, станков, прессов и т.п.
Известен оппозитный кривошипно-ползунный механизм (Патент №2149298 С1, кл. F16H 21/50), содержащий стойку с прямолинейной направляющей, установленные в ней два идентичных ползуна, двуплечий кривошип с фиксированной на стойке осью вращения, два идентичных шатуна и два идентичных коромысла. Шарниры, связывающие шатуны с соответствующими плечами коромысла, а также шарниры, связывающие оба коромысла со стойкой и с шатунами, выполнены сферическими. Шатуны соединены с соответствующими ползунами кинематическими парами, каждая из которых выполнена с возможностью поступательного вдоль расположенной в шатуне плоской оси, перпендикулярной направляющей ползунов, и вращательных движений вокруг взаимно перпендикулярных осей, из которых одна направлена по нормали к шатунной плоскости, а вторая совпадает с продольной осью направляющей ползунов. Одним из практических применений указанного механизма является манипулятор для передачи изделий.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является устройство для передачи изделий (Патент на изобретение №RU 2438856 С2, кл. B25J 18/04), содержащее комбинированный механизм, выполненный в виде многозвенного передаточного механизма с выходным звеном, исполнительного механизма с выходными звеньями, снабженными губками для захвата изделий, и привод. Передаточный механизм включает кривошипно-коромысловый механизм, коромысло которого кинематически связано с выходным звеном посредством системы промежуточных звеньев, включающей подвижно связанные шатун, ползун и зубчатые колеса, при этом ползун снабжен зубчатой рейкой для сопряжения с одним из зубчатых колес, другое зубчатое колесо сопряжено с зубчатой рейкой, укрепленной на выходном звене, которое является ведущим звеном исполнительного механизма, зубчатые колеса жестко и соосно закреплены на одной оси и имеют разные диаметры делительных окружностей, причем зубчатое колесо, сопряженное с зубчатой рейкой ползуна, является колесом меньшего диаметра, а зубчатое колесо большего диаметра выполнено быстросъемным, каждое выходное звено исполнительного механизма снабжено силовым упругим элементом и упором для фиксированного положения на выходном звене передаточного механизма, при этом устройство снабжено раздвижными клиньями для взаимодействия с выходными звеньями исполнительного механизма на границах ходов.
Недостатками приведенных конструкций манипуляторов являются большие габариты вследствие использования рычажных механизмов, а также сложность их уравновешивания.
Технической задачей заявляемого изобретения является создание манипулятора с возвратно-поступательным движением захватных устройств, характеризующегося более высокими эксплуатационными характеристиками.
Техническим результатом является более высокая уравновешенность манипулятора, а также уменьшение габаритных размеров.
Технический результат достигается манипулятором с возвратно-поступательным движением захватных устройств, включающим цилиндрическое зубчатое колесо, выходное звено в виде зубчатой рейки, закрепленные на выходном звене захватные устройства для передачи изделий. Манипулятор дополнительно содержит электродвигатель, вал которого жестко соединен с входным валом, корпус, в котором установлены входной, выходной и промежуточный валы. На корпусе жестко закреплено неподвижное эллиптическое зубчатое колесо, причем неподвижное эллиптическое зубчатое колесо, промежуточный и выходной валы сосны. Выходное звено в виде зубчатой рейки соединено через зубчатую передачу с цилиндрическим зубчатым колесом, жестко закрепленным на выходном валу, и через поступательную кинематическую пару с корпусом. На выходном валу также установлено эллиптическое зубчатое колесо. На входном валу установлено цилиндрическое зубчатое колесо и соединено с водилом зубчатой передачей, при этом водило выполнено в виде цилиндрического зубчатого колеса, установленного на промежуточном валу и соединенного через вращательную кинематическую пару с валом сателлита. Сателлит состоит из эллиптического зубчатого колеса и эллиптической шестерни, повернутых на 180° относительно друг друга и соединенных валом. Эллиптическое зубчатое колесо сателлита соединено с неподвижным эллиптическим зубчатым колесом одного с ним размера, а эллиптическая шестерня сателлита состоит в зубчатом зацеплении с эллиптическим зубчатым колесом одного с ним размера, при этом большие полуоси а всех эллиптических колес одинаковы. Все эллиптические колеса установлены на своих валах таким образом, что ось вращения вала проходит через точку, называемую фокусом делительного эллипса, которая расположена на большой полуоси делительного эллипса на расстоянии c1, равном  от центра делительного эллипса для одной пары колес, имеющей малую полуось b1, и расстоянии с2, равном
от центра делительного эллипса для одной пары колес, имеющей малую полуось b1, и расстоянии с2, равном  , для другой пары, имеющей малую полуось b2. На водиле противоположно валу сателлита на расстоянии Н, равном расстоянию между осями вращения промежуточного вала и вала сателлита, установлен противовес, масса которого равна массе сателлита.
, для другой пары, имеющей малую полуось b2. На водиле противоположно валу сателлита на расстоянии Н, равном расстоянию между осями вращения промежуточного вала и вала сателлита, установлен противовес, масса которого равна массе сателлита.
Технический результат достигается за счет применения планетарной передачи, характеризующейся более высокой компактностью по сравнению с рычажными механизмами, и установкой на водиле противовеса, уравновешивающего планетарный механизм.
Изобретение поясняется следующими чертежами.
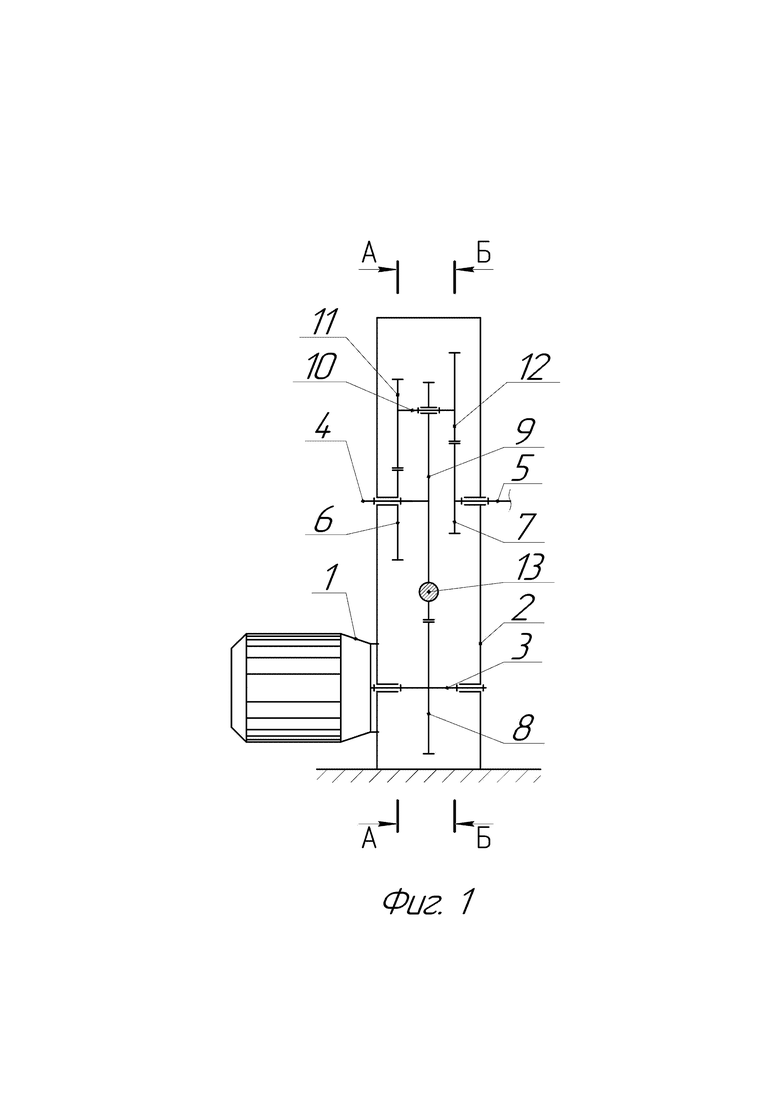
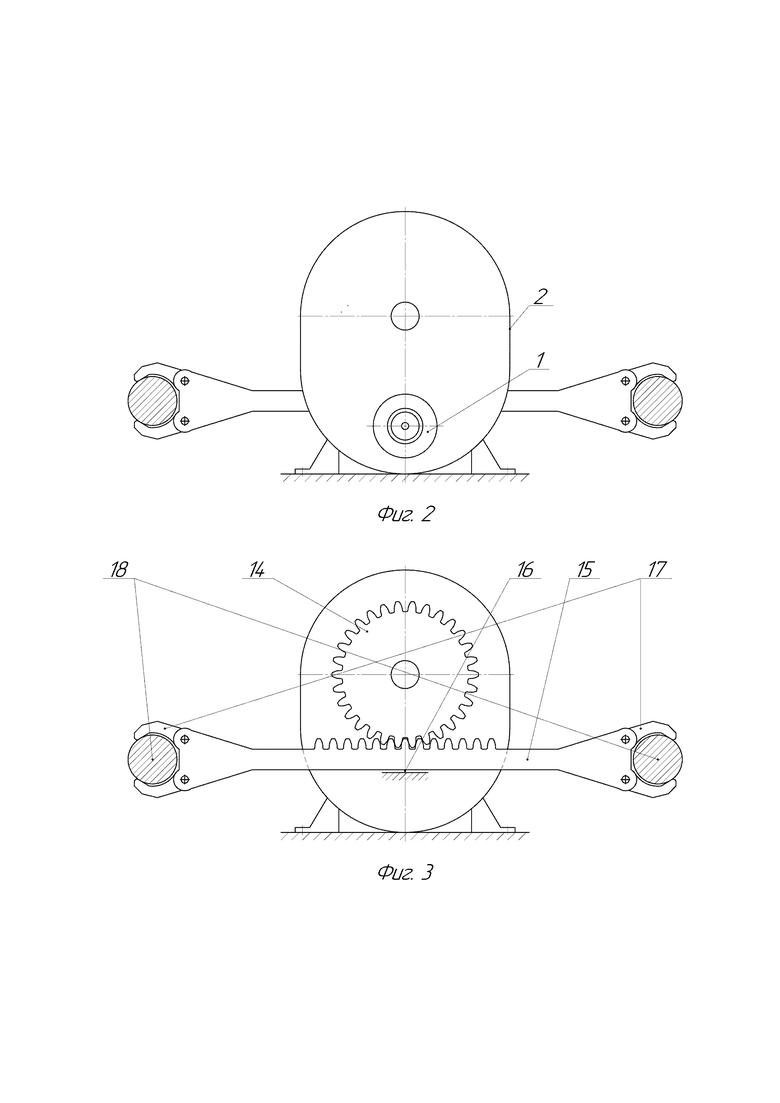
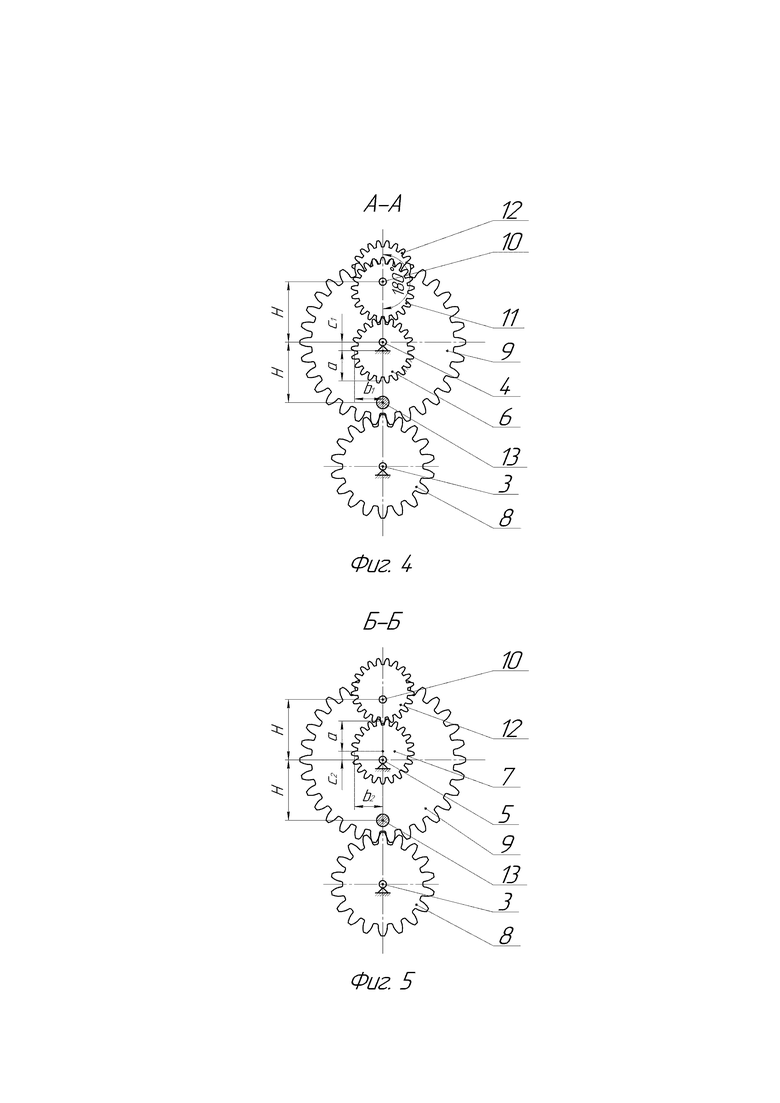
На фиг.1 приведена схема манипулятора с возвратно-поступательным движением захватных устройств (выходное звено с захватными устройствами не показано), на фиг.2, 3 изображены виды слева и справа, на фиг.4 представлен разрез А-А (корпус не показан), на фиг.5 представлен разрез Б-Б (корпус не показан).
Манипулятор с возвратно-поступательным движением захватных устройств содержит электродвигатель 1, корпус исполнительного механизма 2, входной вал 3, жестко соединенный с валом электродвигателя 1, соосные промежуточный вал 4 и выходной вал 5. Неподвижное эллиптическое зубчатое колесо 6 жестко закреплено на корпусе соосно промежуточному валу 4. Эллиптическое зубчатое колесо 7 установлено на выходном валу 5. Цилиндрическое зубчатое колесо 8 установлено на входном валу 3 и соединено с водилом 9 зубчатой передачей. Водило 9 выполнено в виде цилиндрического зубчатого колеса, установленного на промежуточном валу 4 и соединенного через вращательную кинематическую пару с валом сателлита 10. Сателлит состоит из эллиптического зубчатого колеса 11 и эллиптической шестерни 12, повернутых на 180° относительно друг друга и соединенных валом 10 (фиг.4, 5). Неподвижное эллиптическое зубчатое колесо 6 и эллиптическое зубчатое колесо 11 состоят в зацеплении и имеют одинаковые размеры, эллиптическая шестерня 12 и эллиптическое зубчатое колесо 7 также состоят в зацеплении и имеют одинаковые размеры, при этом большие полуоси а всех эллиптических колес одинаковы. Все эллиптические колеса установлены на своих валах таким образом, что ось вращения вала проходит через точку, называемую фокусом делительного эллипса, которая расположена на большой полуоси делительного эллипса на расстоянии c1, равном  от центра делительного эллипса для пары колес 6 и 11, имеющей малую полуось b1, и расстоянии с2, равном
от центра делительного эллипса для пары колес 6 и 11, имеющей малую полуось b1, и расстоянии с2, равном  для пары 7 и 12, имеющей малую полуось b2. На водиле противоположно валу сателлита на расстоянии Н, равном расстоянию между осями вращения промежуточного вала 4 и вала сателлита 10, установлен противовес 13, масса которого равна массе сателлита. На выходном валу 5 закреплено цилиндрическое зубчатое колесо 14 (фиг.3), а выходное звено 15 в виде зубчатой рейки соединено через зубчатую передачу с цилиндрическим зубчатым колесом 14 на выходном валу и через поступательную кинематическую пару 16 с корпусом 2. На выходном звене 15 закреплены захватные устройства 17 для передачи изделий 18.
для пары 7 и 12, имеющей малую полуось b2. На водиле противоположно валу сателлита на расстоянии Н, равном расстоянию между осями вращения промежуточного вала 4 и вала сателлита 10, установлен противовес 13, масса которого равна массе сателлита. На выходном валу 5 закреплено цилиндрическое зубчатое колесо 14 (фиг.3), а выходное звено 15 в виде зубчатой рейки соединено через зубчатую передачу с цилиндрическим зубчатым колесом 14 на выходном валу и через поступательную кинематическую пару 16 с корпусом 2. На выходном звене 15 закреплены захватные устройства 17 для передачи изделий 18.
Манипулятор с возвратно-поступательным движением захватного устройства работает следующим образом.
Электродвигатель 1 сообщает входному валу 3 вращательное движение, которое с помощью цилиндрического зубчатого колеса 8 передается водилу 9, благодаря этому эллиптическое зубчатое колесо 11 обкатывается по неподвижному эллиптическому зубчатому колесу 6, вращательное движение эллиптического колеса 11 через вал 10 и эллиптическую шестерню 12 передается эллиптическому зубчатому колесу 7 и выходному валу 5, при указанном соотношении размеров эллиптических колес выходной вал 5 через полный оборот промежуточного вала 4 и водила 9 оказывается в том же положении, однако благодаря переменным передаточным отношениям пар эллиптических колес 11 и 6, 12 и 7 совершает возвратно-вращательное движение. Данное движение передается закрепленному на выходном валу 5 цилиндрическому зубчатому колесу 14 и с помощью передачи «зубчатое колесо 14 - зубчатая рейка 15» преобразуется в возвратно-поступательное движение выходного звена 15 и захватных устройств 17, которые перемещают изделия 18. Длина траектории перемещения каждого из изделий, представляющей собой отрезок прямой, определяется размером малых полуосей b1 и b2 эллиптических зубчатых колес, а также радиусом цилиндрического зубчатого колеса 14. При работе манипулятора центр масс системы звеньев, включающей водило 9, вал сателлита 10, эллиптическое зубчатое колесо 11, эллиптическую шестерню 12, а также противовес 13, находится на оси вращения промежуточного вала, что обеспечивает высокую уравновешенность манипулятора.
Таким образом, заявляемое изобретение является компактным и уравновешенным манипулятором, позволяющим перемещать изделия по траектории в виде отрезка прямой, что обеспечивает достижение технического результата.
Исследования выполнялись с использованием оборудования ЦКП «Исследовательский центр пищевых и химических технологий» КубГТУ (СКР_3111), развитие которого поддерживается Минобрнауки РФ (Соглашение №075-15-2021-679).
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Измельчитель плодоовощной продукции | 2023 |
|
RU2815851C1 |
| Встряхиватель для пробирок | 2023 |
|
RU2821211C1 |
| Планетарный зубчатый привод стеклоочистителя | 2023 |
|
RU2815138C1 |
| Зубчатый механизм пресса | 2023 |
|
RU2817027C1 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
| Лобзиковая пила с возвратно-поступательным движением пильного полотна | 2023 |
|
RU2810592C1 |
| Лабораторный встряхиватель | 2023 |
|
RU2819973C1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2500938C1 |
Изобретение относится к промышленным манипуляторам и может быть использовано в машиностроении для перемещения объектов, например, при обслуживании работы технологических машин, станков и прессов. Манипулятор содержит цилиндрическое зубчатое колесо, выходное звено в виде зубчатой рейки, закрепленные на выходном звене захватные устройства для передачи изделий электродвигатель, вал которого жестко соединен с входным валом, корпус, в котором установлены входной, выходной и промежуточный валы, жестко закрепленное на корпусе неподвижное эллиптическое зубчатое колесо. Неподвижное эллиптическое зубчатое колесо, промежуточный и выходной валы соосны. Цилиндрическое зубчатое колесо жестко закреплено на выходном валу, а выходное звено в виде зубчатой рейки соединено через зубчатую передачу с цилиндрическим зубчатым колесом на выходном валу и через поступательную кинематическую пару с корпусом. Манипулятор также содержит эллиптическое зубчатое колесо, установленное на выходном валу, цилиндрическое зубчатое колесо на входном валу, соединенное с водилом зубчатой передачей, водило, выполненное в виде цилиндрического зубчатого колеса, установленного на промежуточном валу и соединенного через вращательную кинематическую пару с валом сателлита, состоящего из эллиптического зубчатого колеса и эллиптической шестерни, повернутых на 180° относительно друг друга и соединенных валом. Эллиптическое зубчатое колесо сателлита соединено с неподвижным эллиптическим зубчатым колесом одного с ним размера, а эллиптическая шестерня сателлита состоит в зубчатом зацеплении с эллиптическим зубчатым колесом одного с ним размера. Большие полуоси а всех эллиптических колес одинаковы. Манипулятор также содержит противовес, установленный на водиле противоположно валу сателлита на расстоянии H, равном расстоянию между осями вращения промежуточного вала и вала сателлита, и имеющий массу, равную массе сателлита. Техническим результатом является высокая уравновешенность манипулятора и уменьшение габаритных размеров в осевом направлении. 5 ил.
Манипулятор с возвратно-поступательным движением захватных устройств, включающий цилиндрическое зубчатое колесо, выходное звено в виде зубчатой рейки, закрепленные на выходном звене захватные устройства для передачи изделий, отличающийся тем, что содержит электродвигатель, вал которого жестко соединен с входным валом, корпус, в котором установлены входной, выходной и промежуточный валы, жестко закрепленное на корпусе неподвижное эллиптическое зубчатое колесо, причем неподвижное эллиптическое зубчатое колесо, промежуточный и выходной валы соосны, цилиндрическое зубчатое колесо жестко закреплено на выходном валу, а выходное звено в виде зубчатой рейки соединено через зубчатую передачу с цилиндрическим зубчатым колесом на выходном валу и через поступательную кинематическую пару с корпусом, эллиптическое зубчатое колесо, установленное на выходном валу, цилиндрическое зубчатое колесо на входном валу, соединенное с водилом зубчатой передачей, водило, выполненное в виде цилиндрического зубчатого колеса, установленного на промежуточном валу и соединенного через вращательную кинематическую пару с валом сателлита, состоящего из эллиптического зубчатого колеса и эллиптической шестерни, повернутых на 180° относительно друг друга и соединенных валом, причем эллиптическое зубчатое колесо сателлита соединено с неподвижным эллиптическим зубчатым колесом одного с ним размера, а эллиптическая шестерня сателлита состоит в зубчатом зацеплении с эллиптическим зубчатым колесом одного с ним размера, при этом большие полуоси а всех эллиптических колес одинаковы, кроме того, все эллиптические колеса установлены на своих валах таким образом, что ось вращения вала проходит через точку, называемую фокусом делительного эллипса, которая расположена на большой полуоси делительного эллипса на расстоянии c1, равном  от центра делительного эллипса для одной пары колес, имеющей малую полуось b1, и расстоянии c2, равном
от центра делительного эллипса для одной пары колес, имеющей малую полуось b1, и расстоянии c2, равном , для другой пары, имеющей малую полуось b2, противовес, установленный на водиле противоположно валу сателлита на расстоянии H, равном расстоянию между осями вращения промежуточного вала и вала сателлита, и имеющий массу, равную массе сателлита.
, для другой пары, имеющей малую полуось b2, противовес, установленный на водиле противоположно валу сателлита на расстоянии H, равном расстоянию между осями вращения промежуточного вала и вала сателлита, и имеющий массу, равную массе сателлита.
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| Манипулятор | 1985 |
|
SU1308463A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| Манипулирующее устройство | 1978 |
|
SU674890A2 |
| US 5885052 A1, 23.03.1999 | |||
| Планетарный механизм преобразования вращательного движения в возвратно-вращательное | 2016 |
|
RU2616457C1 |

