ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Данная заявка основана и испрашивает преимущество приоритета предшествующей Патентной Заявке Японии Р2010-156127, поданной 8 июля 2010 г., полное содержание которой включено посредством ссылки в данное описание.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Изобретение относится к электробритве, совершающей возвратно-поступательные движения.
Одна из общепризнанно известных электробритв, совершающих возвратно-поступательные движения, которая раскрыта в выложенной Патентной Публикации Японии № 2004-016524 (далее в данном описании упоминается, как Патентная Литература 1), снабжена конверсионным механизмом, выполненным с возможностью преобразования вращательного движения поворотного двигателя в возвратно-поступательное движение, при этом конверсионный механизм двигает возвратно-поступательно приводной элемент, к которому прикреплено внутреннее лезвие. Кроме того, под приводным элементом предоставлено уравновешивающее устройство для совершения возвратно-поступательных движений с фазой, на 180 градусов отличающейся от фазы приводного элемента.
В Патентной Литературе 1 уравновешивающее устройство совершает возвратно-поступательные движения в фазе, противоположной приводному элементу, для уменьшения вибрации приводного элемента в направлении возвратно-поступательных движений.
В случае, когда два приводных элемента, к которым прикреплены внутренние лезвия, расположены бок о бок, вибрация приводных элементов в направлении возвратно-поступательных движений может быть уменьшена посредством совершения возвратно-поступательных движений приводными элементами в фазах, противоположных друг другу.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Однако, если два приводных элемента совершают возвратно-поступательные движения в противоположных фазах друг к другу, как в упомянутой выше общепризнанной технике, движения вокруг оси вращения поворотного двигателя в приводных элементах направлены в одном и том же направлении вращения. Это вызывает большую вибрацию в процессе работы электробритвы, совершающей возвратно-поступательные движения.
Соответственно цель настоящего изобретения состоит в том, чтобы предоставить электробритву, совершающую возвратно-поступательные движения, с вибрацией, уменьшенной даже в случае содержания множества приводных элементов, расположенных бок о бок.
Для того чтобы достигнуть упомянутую выше цель, настоящее изобретение представляет собой электробритву, совершающую возвратно-поступательные движения, включающую в себя: поворотный двигатель; конверсионный механизм, преобразующий вращательное движение поворотного двигателя в возвратно-поступательные движения; и пару приводных элементов, совершающих возвратно-поступательные движения в фазах, противоположных друг к другу, при этом пара приводных элементов по отдельности соединена с соединительными звеньями, действующими в сочетании с возвратно-поступательными движениями приводных элементов, причем каждый из приводных элементов и соединительное звено, соединенное с ним, составляют приводной блок, а каждый приводной блок включает в себя участок регулировки равновесия, предоставленный на противоположной стороне оси вращения поворотного двигателя от приводного элемента, включенного в приводной блок.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
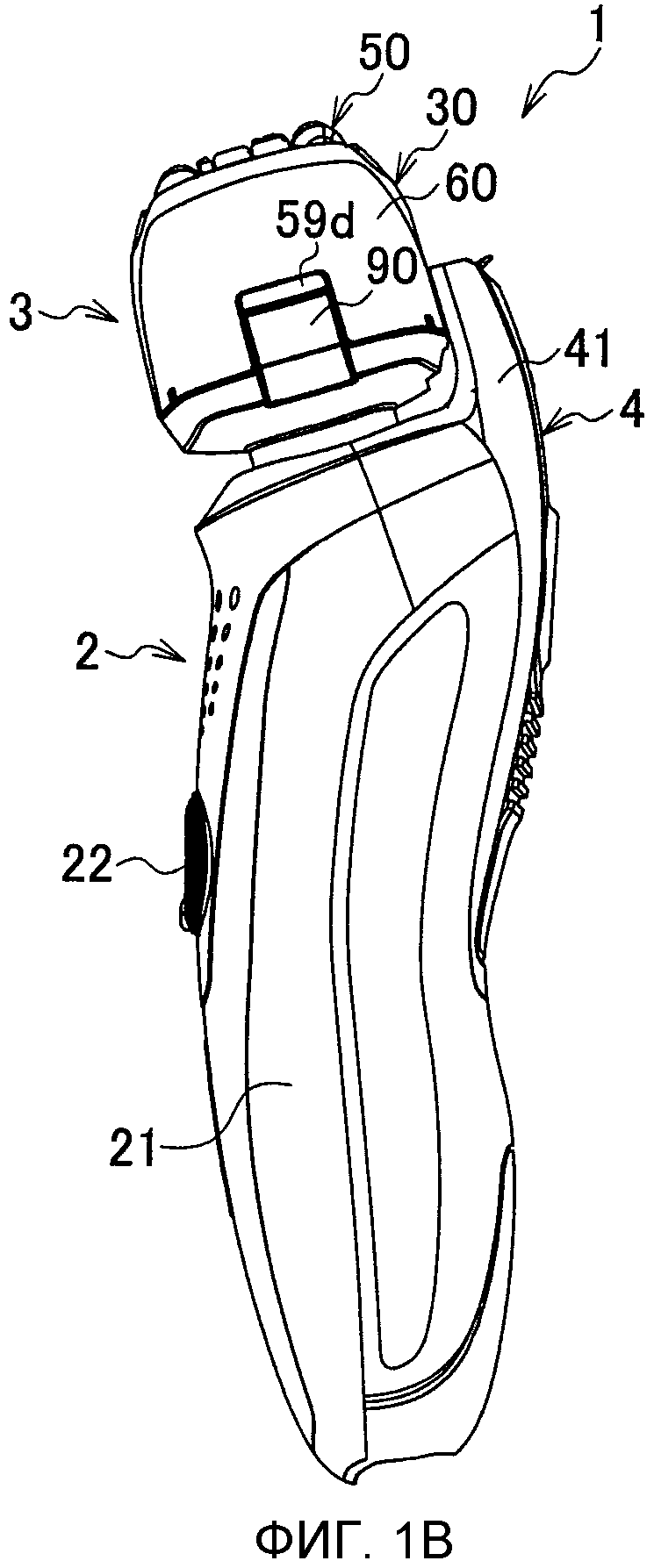
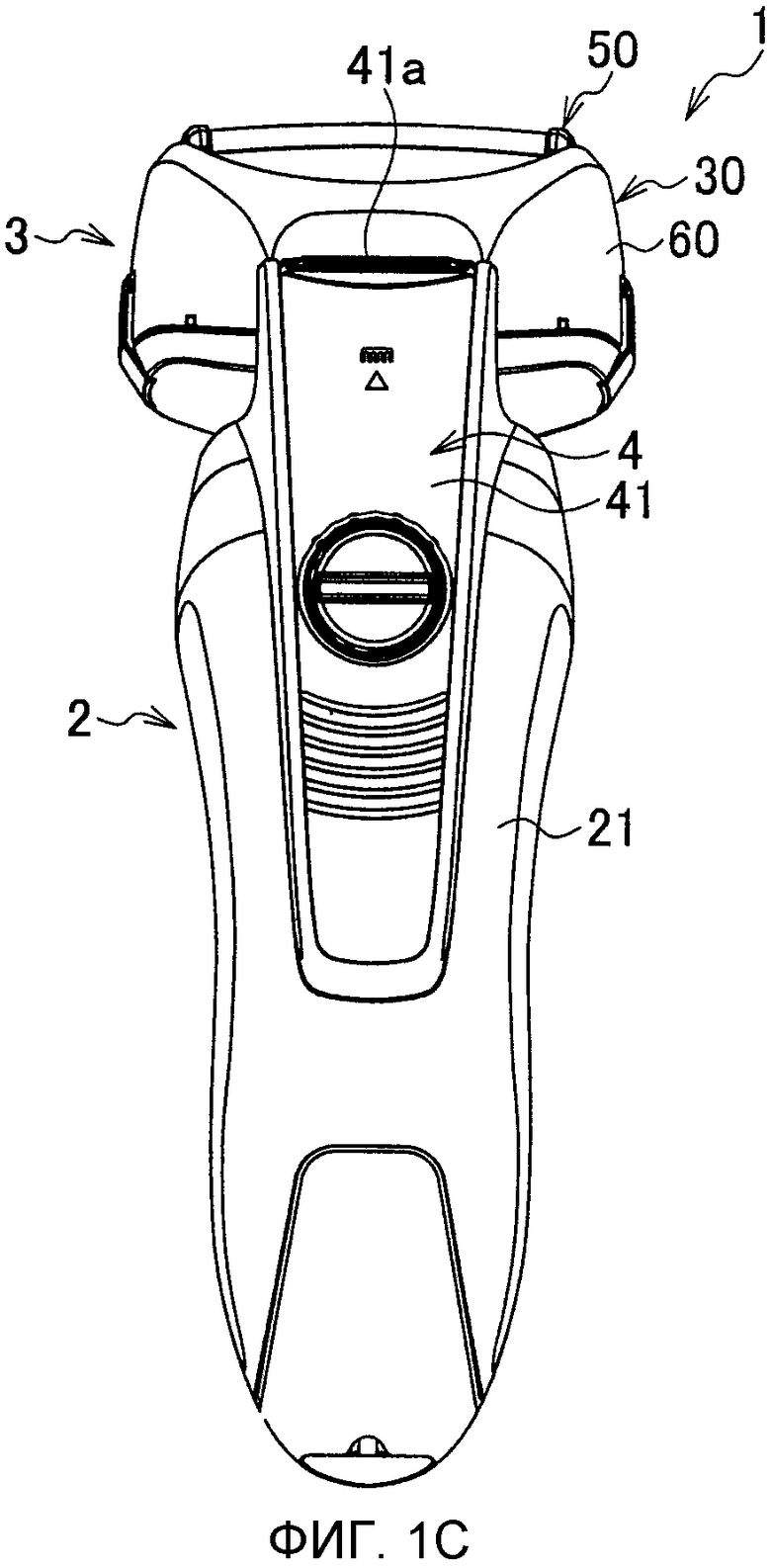
Фиг.1А-1С представляют собой изображения, показывающие электробритву, совершающую возвратно-поступательные движения, согласно варианту осуществления настоящего изобретения, при этом Фиг.1А представляет собой ее вид спереди, Фиг.1В представляет собой вид сбоку, а Фиг.1С представляет собой вид сзади.
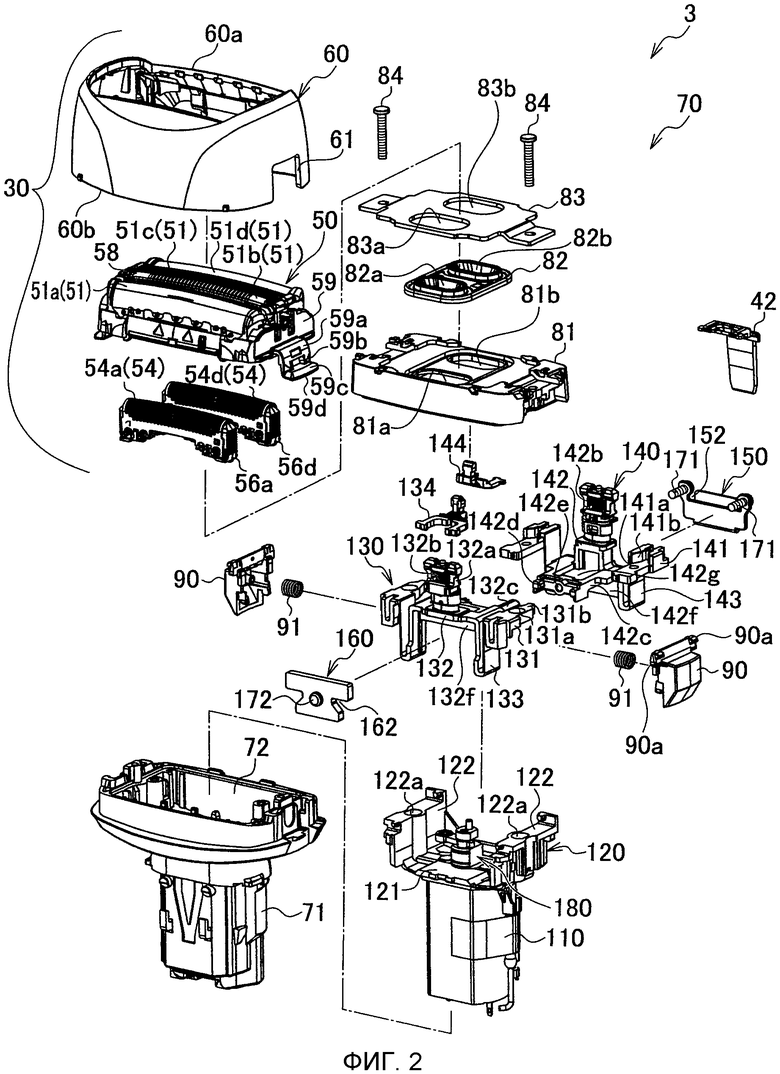
Фиг.2 представляет собой перспективное изображение в разобранном виде, показывающее секцию головки согласно варианту осуществления настоящего изобретения.
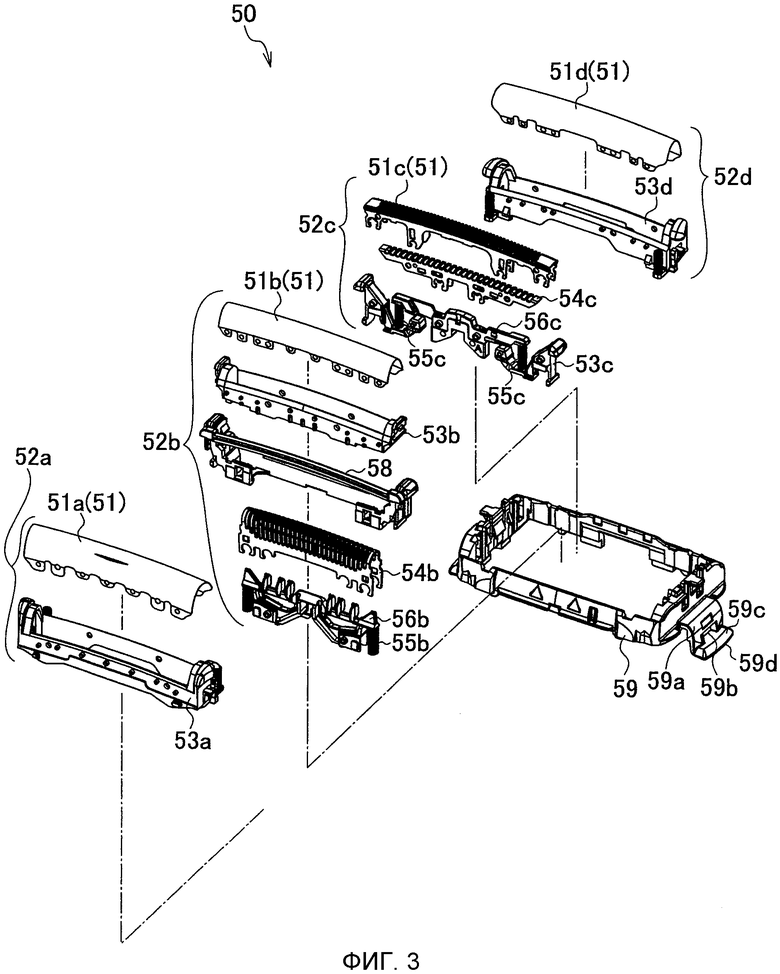
Фиг.3 представляет собой перспективное изображение в разобранном виде, показывающее секцию с рамами и лезвиями согласно варианту осуществления настоящего изобретения.
Фиг.4 представляет собой перспективное изображение секции головки согласно варианту осуществления настоящего изобретения.
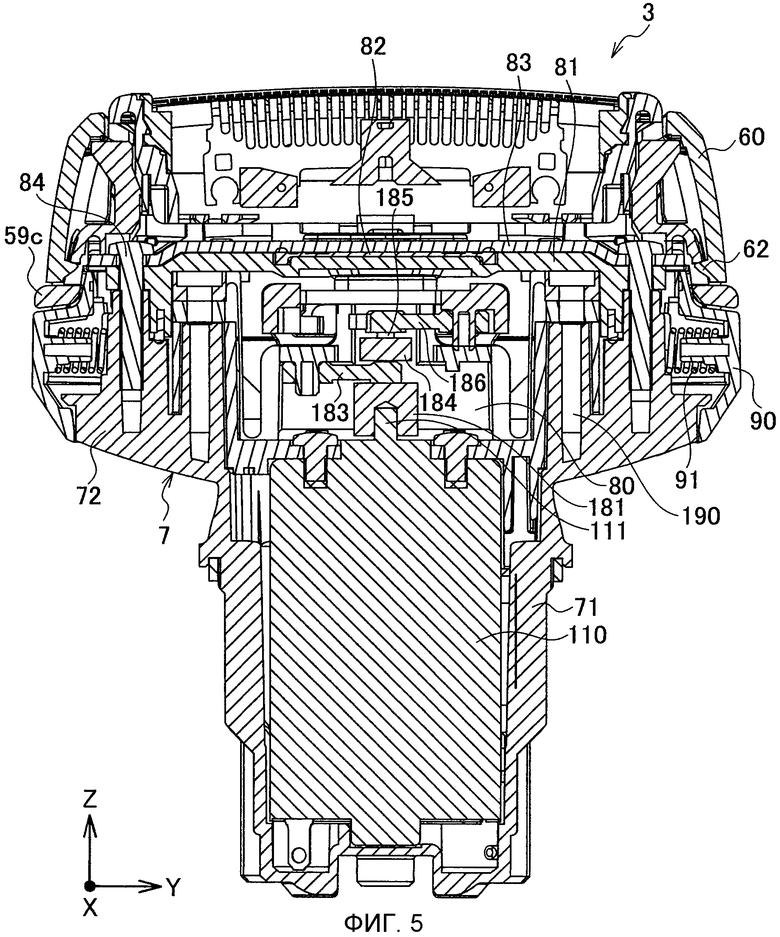
Фиг.5 представляет собой изображение поперечного сечения секции головки согласно варианту осуществления настоящего изобретения.
Фиг.6 представляет собой вид сбоку в разрезе секции головки согласно варианту осуществления настоящего изобретения.
Фиг.7 представляет собой перспективное изображение приводного механизма согласно варианту осуществления настоящего изобретения.
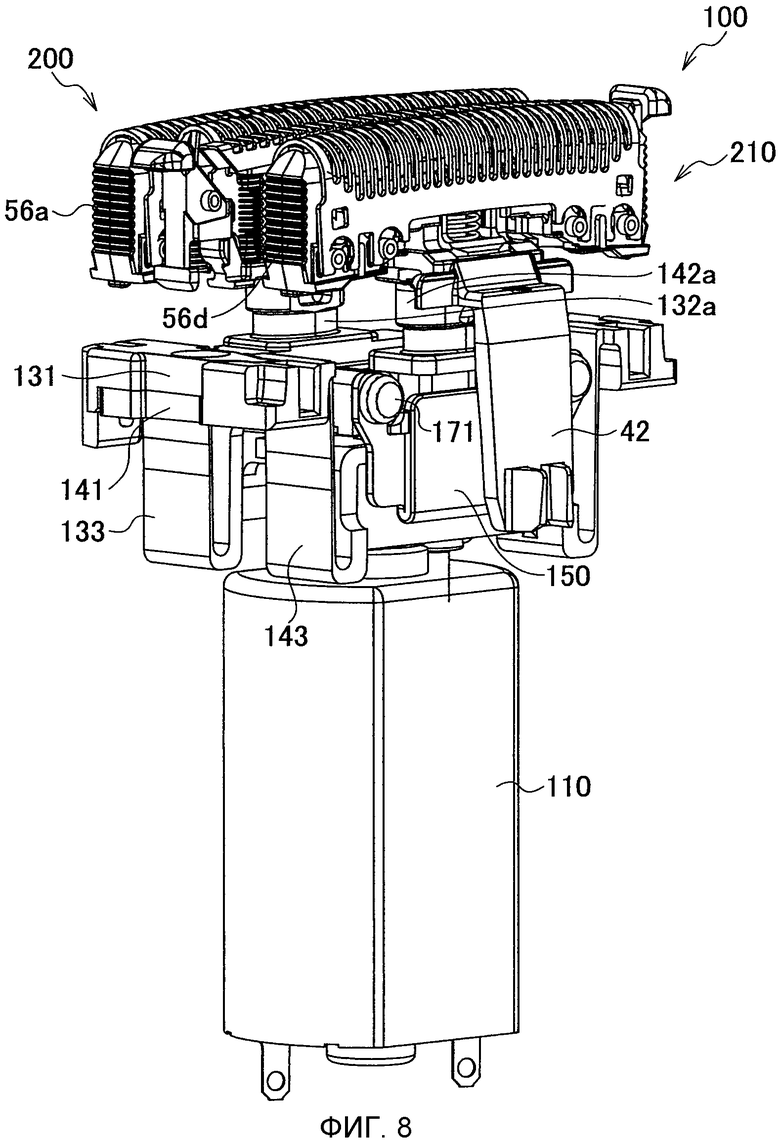
Фиг.8 представляет собой перспективное изображение приводного механизма согласно варианту осуществления настоящего изобретения, если смотреть в направлении, противоположном направлению Фиг.7.
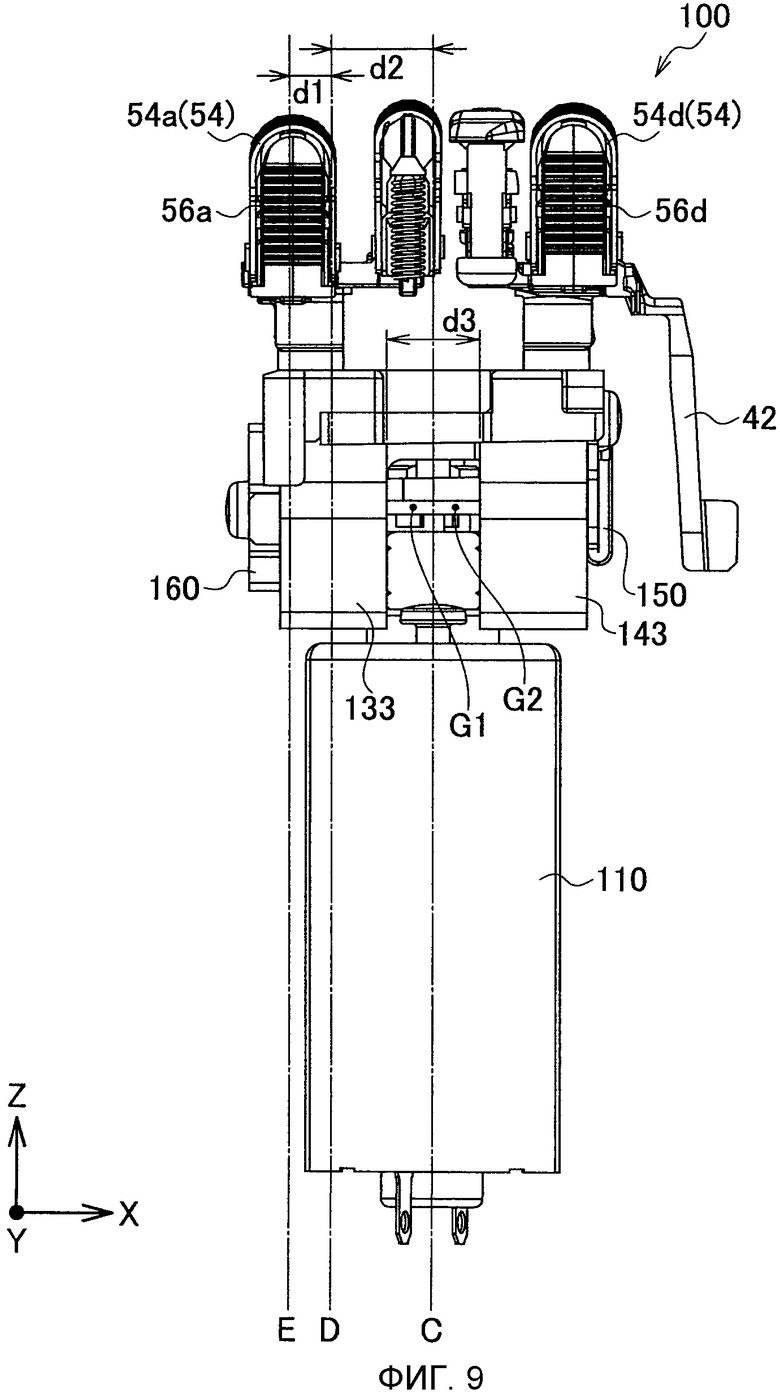
Фиг.9 представляет собой вид сбоку приводного механизма согласно варианту осуществления настоящего изобретения.
Фиг.10 представляет собой вид сбоку в разрезе приводного механизма согласно варианту осуществления настоящего изобретения.
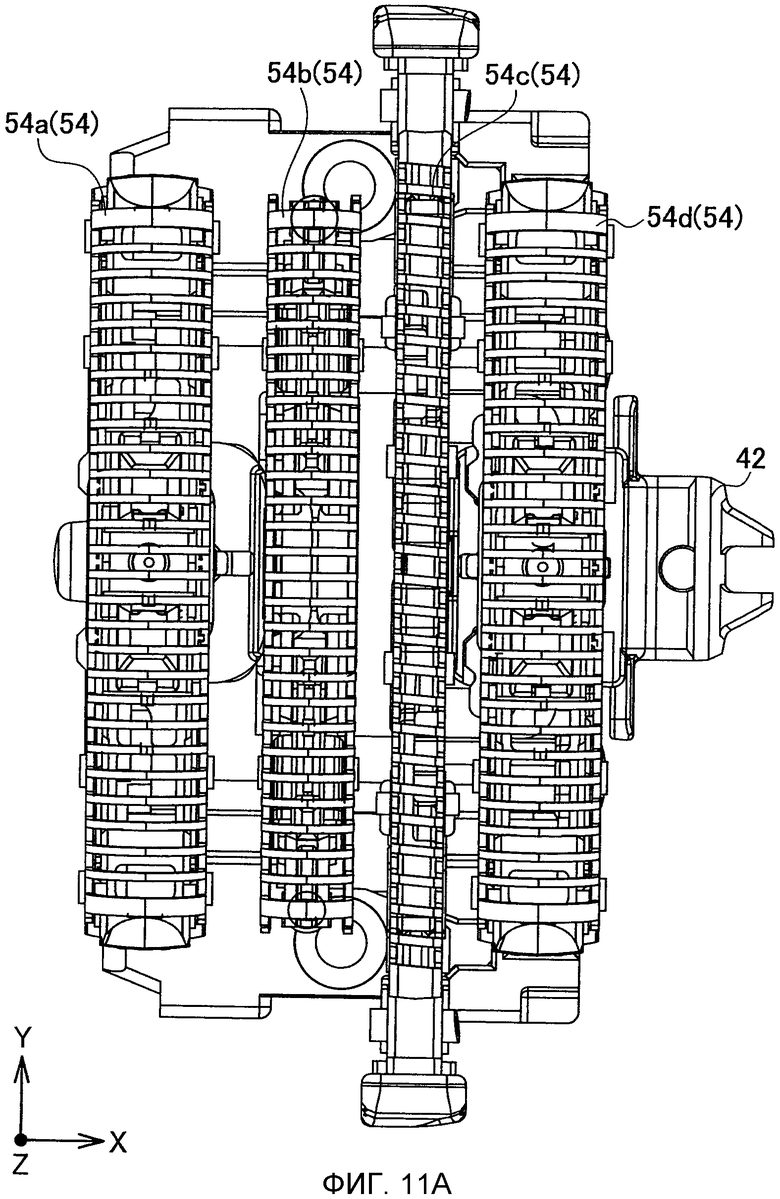
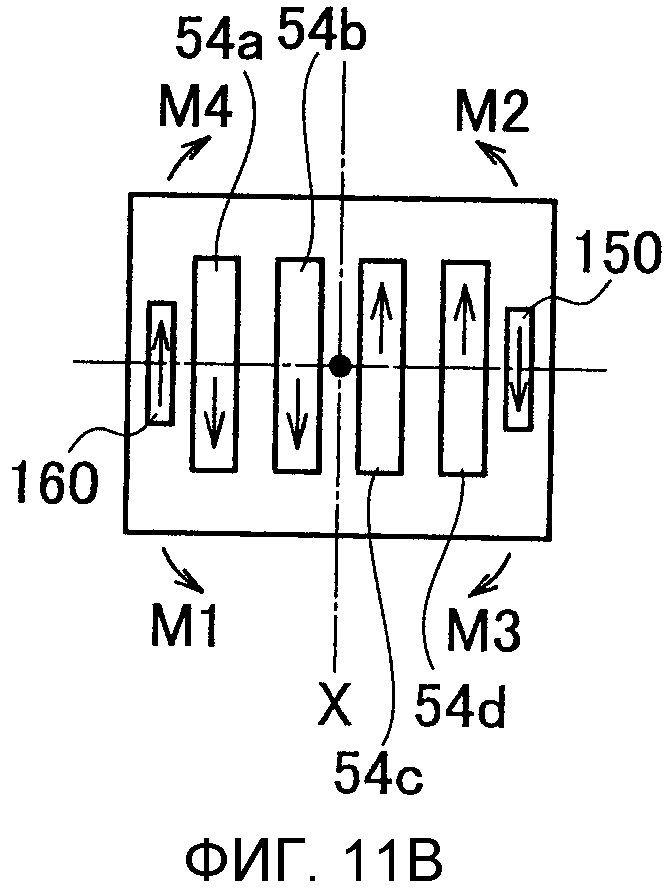
Фиг.11А и 11В показывают приводной механизм согласно варианту осуществления настоящего изобретения, при этом Фиг.11А представляет собой его вид сверху, а Фиг.11В представляет собой вид сверху, схематично показывающий его движение во время вибрации.
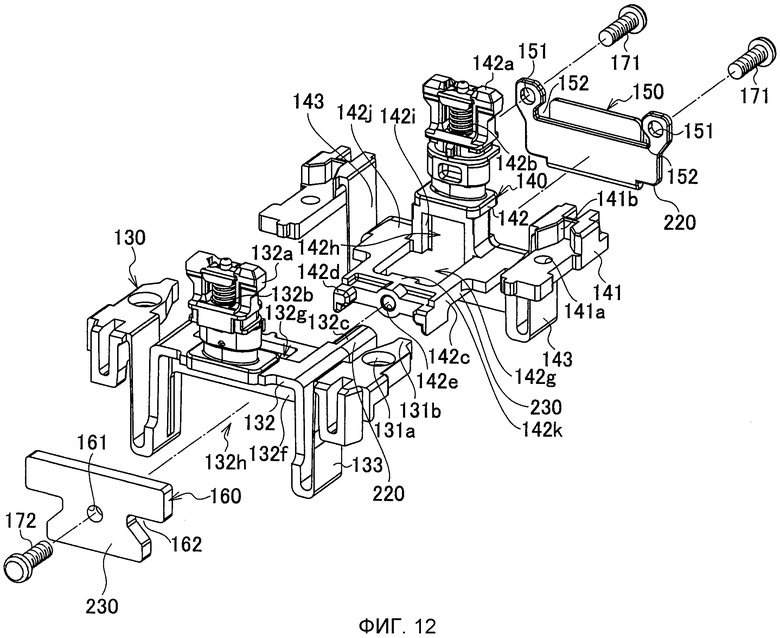
Фиг.12 представляет собой перспективное изображение в разобранном виде, показывающее приводные элементы и звенья регулировки равновесия согласно варианту осуществления настоящего изобретения.
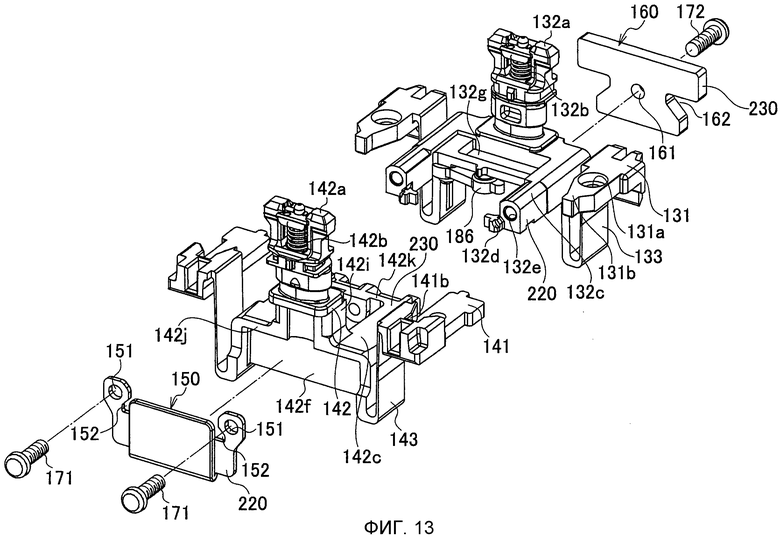
Фиг.13 представляет собой перспективное изображение в разобранном виде приводных элементов и звеньев регулировки равновесия согласно варианту осуществления настоящего изобретения, если смотреть в направлении, противоположном Фиг.12.
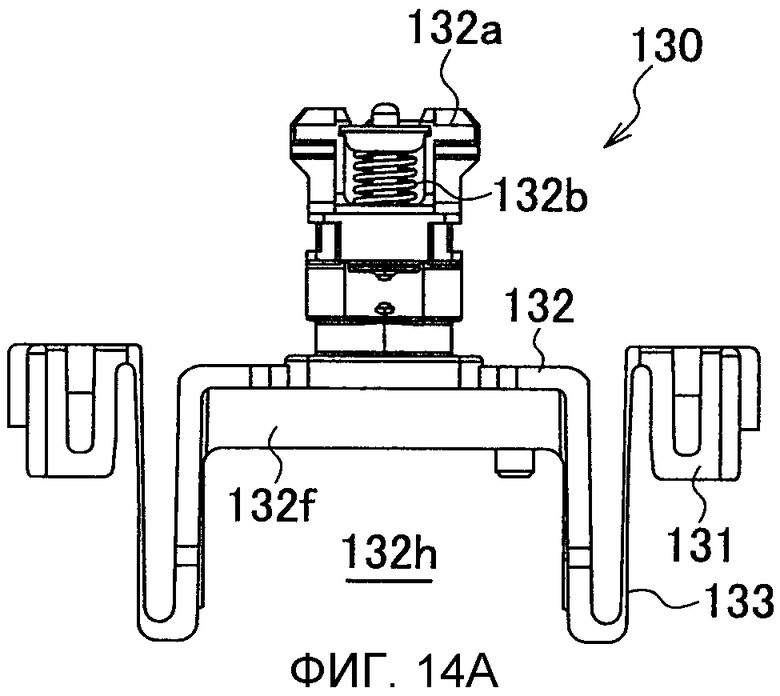
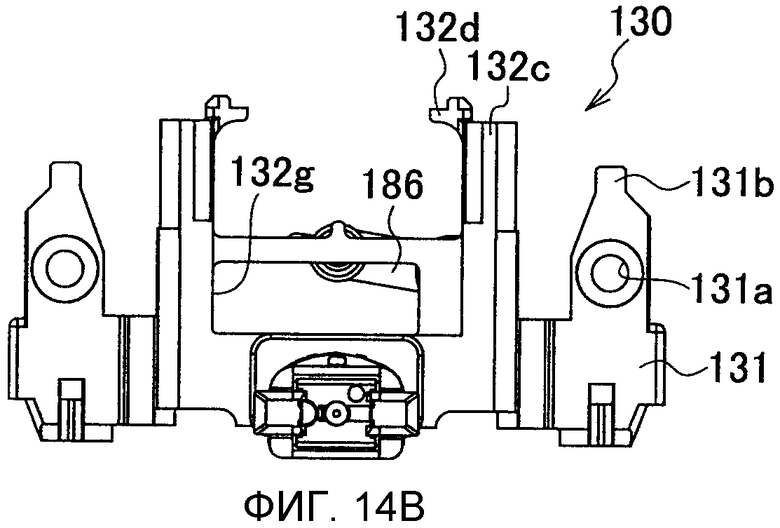
Фиг.14А и 14В представляют собой изображения спереди и сверху, соответственно, показывающие первый приводной элемент согласно варианту осуществления настоящего изобретения.
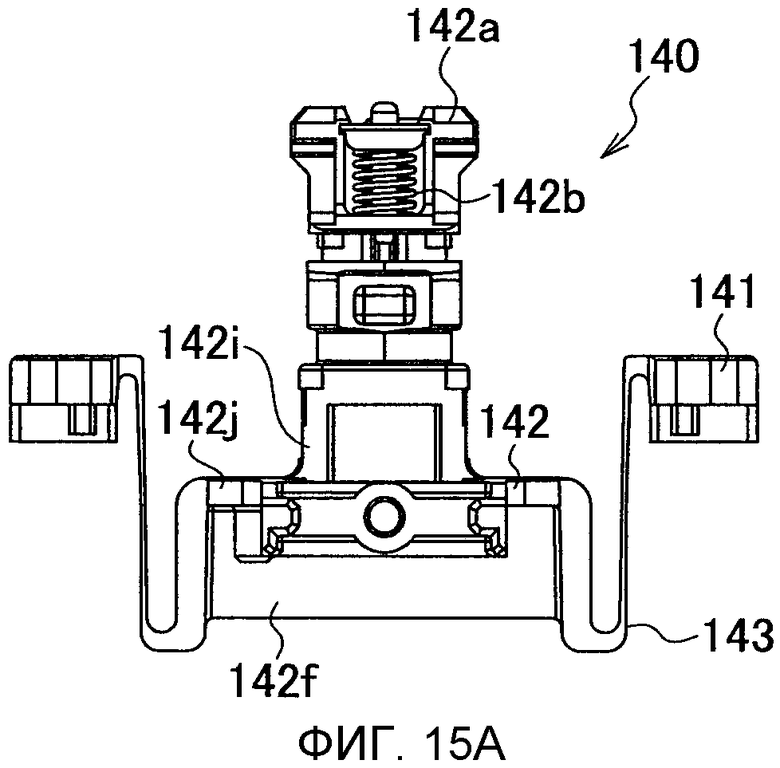
Фиг.15А и 15В представляют собой изображения спереди и сверху, соответственно, показывающие второй приводной элемент согласно варианту осуществления настоящего изобретения.
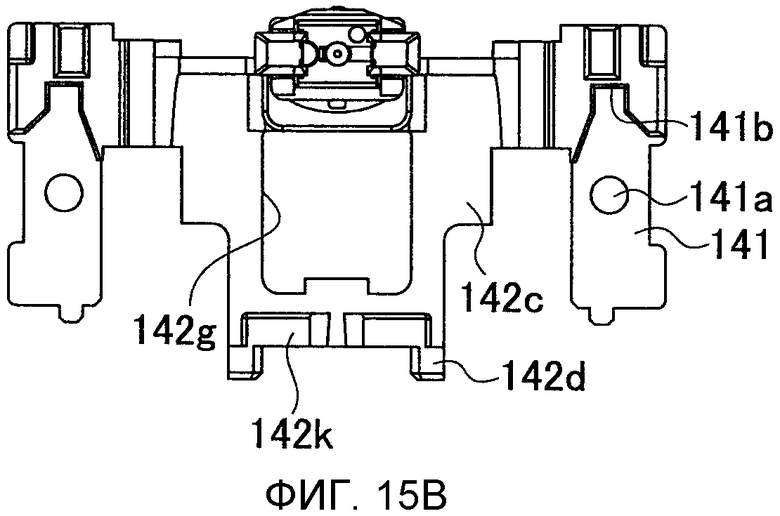
Фиг.16 представляет собой вид сбоку, показывающий приводной механизм согласно первой модификации варианта осуществления настоящего изобретения.
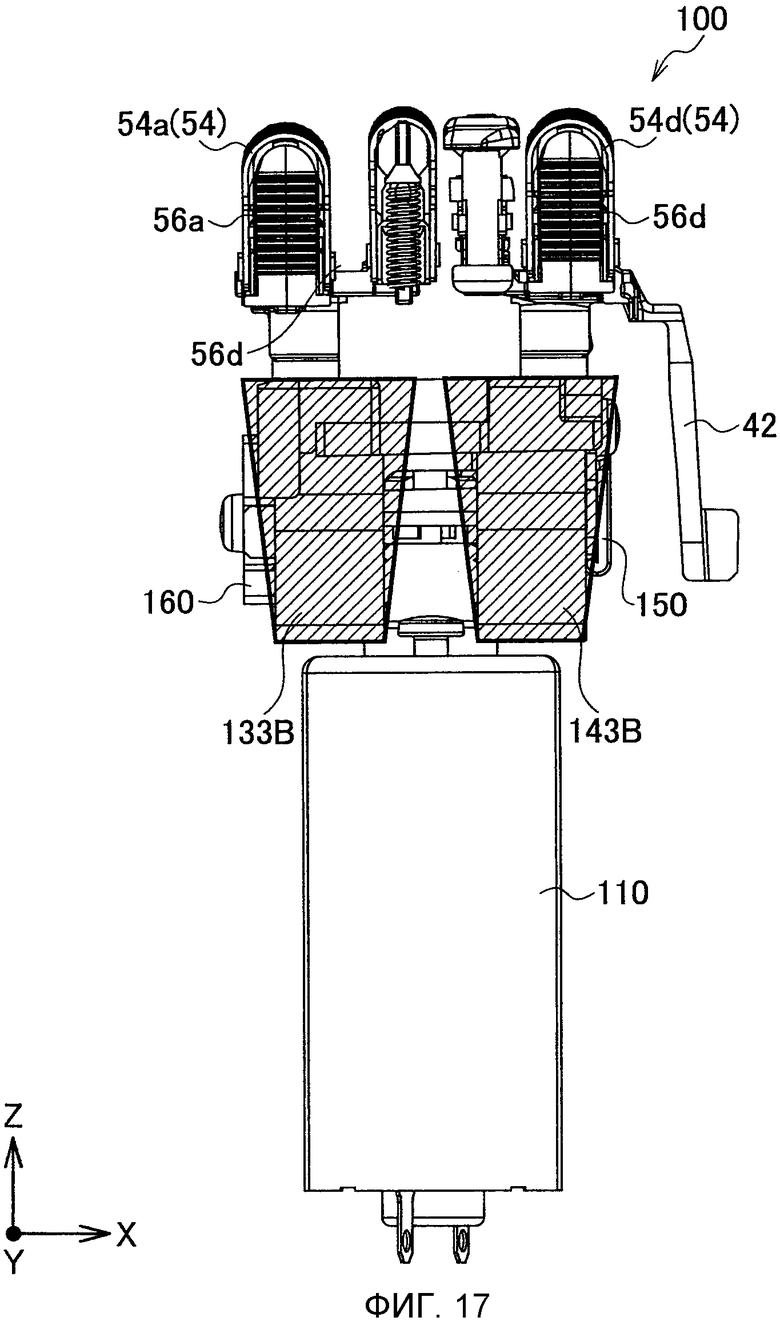
Фиг.17 представляет собой вид сбоку, показывающий приводной механизм согласно второй модификации варианта осуществления настоящего изобретения.
Фиг.18 представляет собой перспективное изображение, показывающее модификацию первого приводного элемента согласно варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее в настоящем описании вариант осуществления настоящего изобретения будет описан более подробно со ссылкой на чертежи. В следующем описании направление, в котором множество внешних лезвий расположены бок о бок, называется направление Х вперед-назад (направление бритья); направление, в котором вытянуты внешние лезвия, называется направление Y вправо-влево; а вертикальное направление, в котором секция головки находится с внешними лезвиями, обращенными вверх, называется направление Z вверх-вниз. Сторона электробритвы, совершающей возвратно-поступательные движения, где предоставлен участок включения, называется передняя стороны в направлении Х вперед-назад.
Как показано на Фиг.1А-1С, электробритва 1, совершающая возвратно-поступательные движения, согласно варианту осуществления включает в себя секцию 2 захвата, захватываемую рукой, и секцию 3 головки, поддерживаемую секцией 2 захвата.
Секция 2 захвата включает в себя корпус 21 захвата, изготовленный из синтетической пластмассы. Как показано на Фиг.1, корпус 21 захвата снабжен участком 22 включения и участком 23 отображения. Участок 22 включения включает и выключает поворотный двигатель 110 (см. Фиг.2). Участок 23 изображения отображает состояние заряда непоказанной батареи, включенной в корпусе 21 захвата. В электробритве 1, совершающей возвратно-поступательные движения, согласно варианту осуществления сформирован триммерный узел 4. Как показано на Фиг.1С, на обратной стороне (задней стороне) корпуса 21 захвата прикреплена триммерная ручка 41 с возможностью плавно перемещаться в направлении вверх-вниз. На верхнем конце триммерной ручки 41 образовано триммерное лезвие 41а.
Внутренние лезвия 54, предоставленные внутри внешних лезвий 51 (под внешними лезвиями 51), выставленных над секцией 3 головки, двигаются относительно внешних лезвий 51 (совершающих возвратно-поступательные движения в направлении Y вправо-влево) с возможностью срезать волосы на теле, попадающие в отверстия внешних лезвий, совместно с внешними лезвиями 51.
Далее описана конфигурация секции 3 головки.
Как показано на Фиг.2, секция 3 головки включает в себя корпус 70 секции головки, прикрепленный к корпусу 21 захвата, и блок 30 с рамами и лезвиями, прикрепленный с возможностью снятия к корпусу 70 секции головки.
В данном варианте осуществления далее описан приводной механизм 100, который расположен в участке 72 размещения приводного механизма, сформированном в кожухе 71 головки, открытом сверху. Кроме того, поверх верхнего открытого участка кожуха 71 головки с приводным механизмом 100, расположенным в участке 72 размещения приводного механизма, помещена крышка 81 корпуса головки, которая прикреплена с помощью винтов 84 с водонепроницаемой резиновой деталью 82 приводного элемента и удерживающей резиновую деталь пластиной 83, помещенной между ними, образуя, таким образом, корпус 70 секции головки.
В то же время участок 72 размещения приводного механизма вмещает в себя участки приводного механизма 100, не являющиеся участками крепления, к которым прикреплены внутренние лезвия 54. В данном варианте осуществления участки крепления включают в себя участки 132а и 142а крепления внутренних лезвий первого и второго приводных элементов 130 и 140 и приводные стержни 134 и 144, прикрепленные к участкам 132а и 142а крепления внутренних лезвий. Другими словами, из приводного механизма 100, к которому прикреплены внутренние лезвия 54, над корпусом 70 секции головки выставлены только участки крепления.
Конкретно говоря, сперва крышку 81 корпуса головки помещают на верхний открытый участок кожуха 71 головки таким образом, чтобы участки 132а и 142а крепления внутренних лезвий первого и второго приводных элементов 130 и 140 входили соответственно в сквозные отверстия 81а и 81b, образованные в крышке 81 корпуса головки.
Вслед за этим участки 132а и 142а крепления внутренних лезвий, выставленные сверху, вставляют соответственно в сквозные отверстия 82а и 82b, сформированные в водонепроницаемой резиновой детали 82 приводного элемента, для того чтобы выставить над водонепроницаемой резиновой деталью 82 приводного элемента. В это время утонченные участки участков 132а и 142а крепления внутренних лезвий сжимаются водонепроницаемой резиновой деталью 82 приводного элемента с герметизацией внутреннего пространства участка 72 размещения приводного механизма.
Участки 132а и 142а крепления внутренних лезвий, выставленные над водонепроницаемой резиновой деталью 82 приводного элемента, вставляют соответственно в сквозные отверстия 83а и 83b, сформированные в удерживающей резиновую деталь пластине 83 с выставлением над удерживающей резиновую деталь пластиной 83. Одновременно участки 132а и 142а крепления внутренних лезвий, выставленные над удерживающей резиновую деталь пластиной 83, прикрепляют к приводным стержням 134 и 144, соответственно. Таким образом, приводной механизм 100 помещают в участке 72 размещения приводного механизма в состоянии, когда участки крепления для прикрепления внутренних лезвий 54 выставлены над корпусом 70 секции головки.
Как описано выше, в данном варианте осуществления кожух 71 головки, крышка 81 корпуса головки, водонепроницаемая резиновая деталь 82 приводного элемента и удерживающая резиновую деталь пластина 83 составляют по существу коробообразное водонепроницаемое пространство (герметичное пространство) 80. Вследствие этого предотвращаются срезание волос тела внутренними лезвиями 54 или попадание воды, используемой для промывки внутренних лезвий 54, и тому подобное, в водонепроницаемое пространство 80, вмещающее в себе поворотный двигатель 110 и тому подобное.
Как показано на Фиг.2, блок 30 с рамами и лезвиями включает в себя коробообразную кассету 50 внешних лезвий и цилиндрическую периферийную раму 60. Кассета 50 внешних лезвий включает в себя множество внешних лезвий 51, которые являются подвижными в направлении вверх-вниз. Периферийная рама 60 прикреплена таким образом, чтобы вмещать кассету 50 внешних лезвий снизу и зарывать всю раму 59 внешних лезвий кассеты 50 внешних лезвий.
Кассета 50 внешних лезвий включает в себя множество внешних лезвий 51, расположенных бок о бок в направлении Х вперед-назад. Данный вариант осуществления включает четыре внешних лезвия 51, включая первое сеточное лезвие 51а, чистовое сеточное лезвие 51b, щелевое лезвие 51с, второе сеточное лезвие 51d, расположенных бок о бок в направлении Х вперед-назад (см. Фиг.3).
Как показано на Фиг.6, каждое из сеточных лезвий 51а, 51b и 51d изогнуто в виде перевернутой формы U вдоль направления Х вперед-назад (в направлении короткой стороны) с выгибом вверх, если смотреть сбоку (когда на внешние лезвия смотрят в направлении Y вправо-влево). Кроме того, каждое из сеточных лезвий 51а, 51b и 51d слегка изогнуто в направлении Y влево-вправо (в продольном направлении) с выгибом вверх, если смотреть спереди (когда на внешние лезвия смотрят в направлении Х вперед-назад). В данном варианте осуществления сеточные лезвия 51а, 51b и 51d изогнуты с выгибом вверх, если смотреть спереди, но нет необходимости их изгибать.
В сеточных лезвиях 51а, 51b и 51d определено количество отверстий лезвий (не показаны). В данном варианте осуществления, как показано на Фиг.6, ширина чистового сеточного лезвия 51b (ширина в направлении Х вперед-назад) сделана меньше, чем ширина первого и второго сеточных лезвий 51а и 51d. За счет создания ширины чистового сеточного лезвия 51b меньше, чем ширина других сеточных лезвий 51а и 51d (ширина в направлении Х вперед-назад), то есть за счет создания меньшего радиуса изгиба чистового сеточного лезвия 51b, кожа, сдавливаемая о поверхность, больше выдается внутрь сквозь отверстия лезвий, так что чистовое сеточное лезвие 51b может короче срезать волосы тела.
Как показано на Фиг.3, щелевое лезвие 51с изогнуто в виде квадратной формы U вдоль направления Х вперед-назад (направления короткой стороны) и снабжено множеством щелей (отверстий лезвия), тянущихся от плоской верхней стенки к боковым стенкам.
Другими словами, в щелевом лезвии 51с, количество щелей (отверстий лезвия) определяется полосками, предоставленными от плоской верхней стенки к боковым стенкам, и полосками, тянущимися в нижних частях боковых стенок в продольном направлении Y (направление вправо-влево).
Сеточные лезвия 51а, 51b и 51d, составляющие внешние лезвия 51, прикреплены к специализированным рамам 53а, 53b и 53d внешних лезвий с образованием блоков 52а, 52b и 52d внешних лезвий, соответственно.
Направляющее кожу звено 58 прикреплено к стороне первого сеточного лезвия 51а рамы 53b внешних лезвий. Щелевое лезвие 51с и направляющее кожу звено 58, с помещенным между ними чистовым сеточным лезвием 51b, спереди и сзади эффективно предотвращают сильное надавливание кожи о чистовое сеточное лезвие 51b, имеющее маленький радиус изгиба.
Блоки 52а, 52b, 52с и 52d внешних лезвий независимо сцеплены с рамой 59 внешних лезвий для того, чтобы двигаться вверх и вниз, образуя, таким образом, кассету 50 внешних лезвий. Данная кассета 50 внешних лезвий прикреплена с возможностью снятия к периферийной раме 60 и прикреплена с возможностью снятия к корпусу 70 секции головки.
Внутренние лезвия 54 специально предоставлены с соответствием сеточным лезвиям 51а, 51b и 51d и щелевому лезвию 51с, составляя внешние лезвия 54. Конкретно под(внутри) сеточными лезвиями 51а, 51b и 51d предоставлены перевернутые U-образные внутренние лезвия 54а, 54b и 54d вдоль изгибов сеточных лезвий 51а, 51b и 51d, соответственно (см. Фиг.2 и 3). Под(внутри) щелевым лезвием 51с предоставлено внутреннее щелевое лезвие 54с, имеющее квадратную U-образную форму, вдоль изгиба щелевого лезвия 51с.
Данные внутренние лезвия 54а, 54b и 54d и внутреннее щелевое лезвие 54с прикреплены к приводному механизму 100 (участкам 132а и 142а крепления внутренних лезвий и приводным стержням 134 и 144 первого и второго приводных элементов 130 и 140). Внутренние лезвия 54а, 54b и 54d и внутреннее щелевое лезвие 54с выполнены с возможностью индивидуального возвратно-поступательного движения в направлении Y (продольное направление) при приведении в действие приводного механизма 100.
Внутренние лезвия 54а, 54b и 54d и внутреннее щелевое лезвие 54с, предоставленные под(внутри) сеточными лезвиями 51а, 51b и 51d и щелевым лезвием 51с, соответствующим образом двигаются относительно сеточных лезвий 54а, 54b и 54d и внутреннего щелевого лезвия 54с (совершающего возвратно-поступательные движения в направлении Y вправо-влево) для отрезания волос тела, попадающих в отверстия сеточных лезвий 51а, 51b и 51d и в щели внутреннего щелевого лезвия 54с, вместе с сеточными лезвиями 51а, 51b и 51d и щелевым лезвием 51с.
В данном варианте осуществления чистовое внутреннее лезвие 54b, прикрепленное к основанию 56b, прикреплено к кассете 50 внешних лезвий для того, чтобы совершать возвратно-поступательные движения относительно чистового сеточного лезвия 51b, а внутреннее щелевое лезвие 54с, прикрепленное к основанию 56с, прикреплено к кассете 50 внешних лезвий для того, чтобы совершать возвратно-поступательные движения относительно щелевого лезвия 51с (см. Фиг.3).
Конкретно говоря, на обоих концах в направлении Y предоставлены рамы 53с внешних лезвий, к которым прикреплено щелевое лезвие 51с, как показано на Фиг.3, а основание 56с прикреплено между рамами 53с внешних лезвий, при этом между ними помещены поднимающие пружины 55с внутренних лезвий для того, чтобы совершать возвратно-поступательные движения в направлении Y. К основанию 56с прикреплено внутреннее щелевое лезвие 54с, а щелевое лезвие 51с прикреплено к рамам 53с внешних лезвий поверх внутреннего щелевого лезвия 54с, образуя таким образом блок 52с внешних лезвий.
Рама 53b внешних лезвий, прикрепленная к чистовому сеточному лезвию 51b, прикреплена к направляющему кожу звену 58, а чистовое внутреннее лезвие 54b, прикрепленное основанию 56b, предоставлено под чистовым сеточным лезвием 51b и приводится в действие за счет поднимающих пружин 55b внутренних лезвий, образуя таким образом блок 52b внешних лезвий (см. Фиг.3).
Как описано выше, в данном варианте осуществления кассета 50 внешних лезвий прикреплена к корпусу 70 секции головки, при этом внутренние лезвия 54а и 54d, прикрепленные соответственно к участкам 132а и 142а крепления внутренних лезвий, выставлены над корпусом 70 секции головки, а приводные стержни 134 и 144 прикреплены соответственно к участкам 132а и 142а крепления внутренних лезвий. Кассета 50 внешних лезвий прикреплена к корпусу 70 секции головки таким образом, что внутренние лезвия 54а и 54d располагаются под блоками 52а и 52d внешних лезвий. Когда кассету 50 внешних лезвий прикрепляют к корпусу 70 секции головки, основания 56b и 56с, прикрепленные к кассете 50 внешних лезвий, соединяются с приводными стержнями 134 и 144. Другими словами, за счет прикрепления кассеты 50 внешних лезвий к корпусу 70 секции головки чистовое внутреннее лезвие 54b и внутреннее щелевое лезвие 54с могут быть задействованы совместно с движением приводного механизма 100.
Кроме того, как показано на Фиг.2, упругие детали 59а тянутся вниз по обеим правой и левой сторонам рамы 59 внешних лезвий кассеты 50 внешних лезвий. В спаренных правой и левой упругих деталях, по отдельности образованы сквозные отверстия 59b, пронизывающие в направлении вправо-влево. Кроме того, в нижних частях упругих деталей 59а, по отдельности тянутся наружу кнопки 59с фиксатора.
В цилиндрической внешней раме 60, открытой на верхнем и нижнем концах, образованы утопленные участки 61 как на правой, так и на левой сторонах нижнего края, при этом из нижних частей утопленных участков 61 вниз по отдельности выступают крючки 62 (см. Фиг.5).
В данном варианте осуществления во внешней раме 60 верхнее отверстие 60а меньше, чем профиль рамы 59 внешних лезвий кассеты 50 внешних лезвий, и больше, чем профиль всех поверхностей внешних лезвий 51. Нижнее отверстие 60b больше, чем профиль рамы 59 внешних лезвий за исключением кнопок 59с фиксатора.
Когда кассету 50 внешних лезвий вставляют из нижнего отверстия 60b во внешнюю раму 60, причем кнопки 59с фиксатора как на правом, так и левом концах вставляют в утопленные участки 61, верхние концы крючков 62, выступающих внутрь из внешней рамы 60, входят в зацепление с внешней стороны со сквозными отверстиями 59b обеих упругих деталей 59а рамы 59 внешних лезвий (см. Фиг.5). Раму 59 внешних лезвий или кассету 50 внешних лезвий таким образом прикрепляют к внешней раме 60.
Как показано на Фиг.4 и 5, кнопки 59с фиксатора рамы 59 внешних лезвий предоставлены таким образом, что верхние их концы выступают наружу из соответствующих внешних боковых поверхностей внешней рамы 60, при прикреплении внешней рамы 60. Соответственно, если рабочие стороны 59d на верхних концах правой и левой кнопок 59с фиксатора захватывают и помещают посередине с нажатием внутрь, упругие детали 59а на обеих сторонах изгибаются внутрь с высвобождением зацепления крючков 62 и сквозных отверстий 59b, при этом кассету 50 внешних лезвий за счет этого отсоединяют от внешней рамы 60.
Как показано на Фиг.5, на обоих правом и левом концах корпуса 70 секции головки предоставлены кнопки 90 фиксатора для того, чтобы выступать и отводиться при приложении усилия наружу в направлении Y вправо-влево. На обоих концах верхней части каждой кнопки 90 фиксатора в направлении по ширине (направление Х вперед-назад) предоставлены входящие в зацепление выступы 90а (см. Фиг.2).
Если блок 30 с рамами и лезвиями помещают поверх корпуса 70 секции головки, в то время как кнопки 90 фиксатора вставляют сквозь утопленные участки 61 внешней рамы 60 как на правом, так и на левом концах, входящие в зацепление выступы 90а, поджимаемые наружу в направлении Y вправо-влево, входят в зацепление с непоказанными входящими в зацепление пазами, образованными во внутренней периферии рамы 59 внешних лезвий. Таким образом, раму 60 внешних лезвий (кассету 50 внешних лезвий или весь блок 30 с рамами и лезвиями) прикрепляют к верхнему концу корпуса 70 секции головки.
Если кнопки 90 фиксатора вдавливают внутрь против активирующего усилия пружин 91, освобождают зацепление входящих в зацепление выступов 90а и входящих в зацепление пазов (непоказанных), а затем раму 59 внешних лезвий отсоединяют от корпуса 70 секции головки.
Далее описан приводной механизм 100.
В данном варианте осуществления, как показано на Фиг.2, приводной механизм 100 включает: поворотный двигатель 110; опору 120, поддерживающую поворотный двигатель 110; первый и второй приводные элементы 130 и 140, которые опираются на опору 120 и осуществляют возвратно-поступательные движения в противоположных фазах; и конверсионный механизм 180, преобразующий вращательное движение поворотного двигателя 110 в возвратно-поступательное движение и передающий возвратно-поступательное движение первому и второму приводным элементам 130 и 140.
Поворотный двигатель 110 прикреплен к опоре 120 таким образом, чтобы свисать вниз. Опора 120 включает в себя: нижнюю стенку 121; и неподвижные боковые стенки 122, присоединенные в виде единого целого к правому и левому краям нижней стенки 121. В каждой неподвижной боковой стенке 122 образовано резьбовое отверстие 122а. Скрепляющие винты 190 ввинчивают в резьбовые отверстия 122а для прикрепления опоры 120 к кожуху 71 головки вместе с первым и вторым приводными элементами 130 и 140.
Конверсионный механизм 180 включает в себя: основание 181, прикрепленное с возможностью вращения к вращающемуся валу 111 поворотного двигателя 110, выступающему из нижней стенки 121 опоры 120; и нижний эксцентриковый вал 182, предоставленный внецентренно относительно вращающегося вала 111. Конверсионный механизм 180 дополнительно включает в себя: нижний соединительный рычаг 183, который прикреплен к нижнему эксцентриковому валу 182 и соединяет нижний эксцентриковый вал 182 и второй приводной элемент 140; и основание 184, прикрепленное к нижнему эксцентриковому валу 182. Конверсионный механизм 180 дополнительно включает в себя: верхний эксцентриковый вал 185, предоставленный для основания 184, внецентренно относительно вращающегося вала 111; и верхний соединительный рычаг 186, который прикреплен к верхнему эксцентриковому валу 185 и соединяет верхний эксцентриковый вал 185 и первый приводной элемент 130.
В данном варианте осуществления верхний и нижний эксцентриковые валы 182 и 185 снабжены фазами, отличающимися на 180 градусов относительно вращающегося вала 111 поворотного двигателя 110, и преобразуют вращательное движение поворотного двигателя 110 в возвратно-поступательное движение первого и второго приводных элементов 130 и 140 в противоположных фазах.
Как описано выше, первый и второй приводные элементы 130 и 140 включают в себя участки 132а и 142а крепления внутренних лезвий, к которым прикреплены с возможностью снятия внутренние лезвия 54а и 54d, соответственно. Как показано на Фиг.12 и 13, первый приводной элемент 130 образован посредством присоединения фиксирующих блоков 131, которые расположены на обоих концах в направлении по ширине, к опорной раме 132, которая поддерживает участок 132а крепления внутренних лезвий, с парой упруго деформируемых упругих стоек 133 (при этом упругие стойки поддерживают участок 132а крепления внутренних лезвий для осуществления возвратно-поступательных движений). Второй приводной элемент 140 образован посредством присоединения фиксирующих участков 141, которые располагаются на обоих концах в направлении по ширине, к опорной раме 142, которая поддерживает участок 142а крепления внутренних лезвий, парой упруго деформируемых упругих стоек 143 (при этом упругие стойки поддерживают участок 142а крепления внутренних лезвий для осуществления возвратно-поступательных движений). Упругие стойки 133 и 143 расположены под участками 132а и 142а крепления внутренних лезвий, соответственно, если смотреть в направлении Y вправо-влево (направлении осуществления возвратно-поступательных движений приводных элементов) (см. Фиг.9).
Фиксирующие блоки 131 и 141 снабжены, соответственно, резьбовыми отверстиями 131а и 141а и входящими в зацепление участками, сцепляющимися друг с другом (в данном варианте осуществления, входящими в зацепление выступами 131b и 141b). Когда фиксирующий блок 131 помещают на фиксирующий блок 141, при этом входящие в зацепление выступы 131b и 141b сцепляются друг с другом, резьбовые отверстия 131а и 141а сообщаются друг с другом. В резьбовые отверстия 131а и 141а, сообщающиеся друг с другом, вставляют винты 190 для прикрепления первого и второго приводных элементов 130 и 140 к кожуху 71 головки с опорой 120, вставленной между ними.
Каждая из опорных рам 132 и 142 имеет форму прямоугольной пластины, располагающейся по существу горизонтально, а на опорных рамах 132 и 142, соответственно, выступают участки 132а и 142а крепления внутренних лезвий. На обоих концах опорной рамы 142 в направлении по ширине, вниз тянутся боковые стенки 142i, а на нижнем конце каждой боковой стенки 142i наружу тянется горизонтальная стенка 142j в направлении по ширине (см. Фиг.12).
Каждая из упругих стоек 133 имеет форму сложенного листа. Ее конец соединен с верхним внутренним концом соответствующего фиксирующего блока 131, а другой конец соединен с одним из внешних концов опорной рамы 132. С другой стороны, каждая из упругих стоек 143 имеет форму сложенного листа. Ее конец соединен с верхним внутренним концом соответствующего фиксирующего блока 141, а другой конец соединен с одним из внешних концов горизонтальной стенки 142j. Другими словами, упругая стойка 143 соединяет фиксирующий блок 141 и опорную раму 142 с горизонтальной стенкой 142j и боковой стенкой 142i, помещенной между ними.
Участки 132а и 142а крепления внутренних лезвий снабжены поднимающими пружинами (активизирующими звеньями) 132b и 142b, соответственно. Поднимающие пружины 132b и 142b давят (активизируют) вверх внутренние лезвия 54а и 54b, прикрепленные к участкам 132а и 142а крепления внутренних лезвий (в направлении прикрепления и отсоединения внутренних лезвий), соответственно.
В данном варианте осуществления внешняя часть каждой упругой стойки 133 и 143 тоньше, чем ее внутренняя часть. За счет создания внешних частей упругих стоек 133 и 143 более тонкими, опорные рамы 132 и 142 (включая участки 132а и 142а крепления внутренних лезвий и внутренние лезвия 54) могут быть легко повернуты в направлении Y вправо-влево. Кроме того, за счет создания толстых внутренних частей, которые являются предметов воздействия противодействующей силы от внутренних лезвий 54а и 54d, активизированных вверх, может быть предотвращена деформация первого и второго приводных элементов 130 и 140 за счет противодействующей силы благодаря внутренним лезвиям 54а и 54d.
Упругие стойки 133 и 143 могут быть сформированы, как показано на Фиг.16 и 17. Конкретно, как показано на Фиг.16, множество упругих пластин расположены бок о бок в направлении Х вперед-назад с образованием каждой упругой стойки 133А или 143А. В это время, если упругие пластины не предоставлены для участков, менее подверженных действию крутящего момента в направлении Х вперед-назад, упругие стойки 133А и 143А могут легко деформироваться, в то время как упругие стойки 133А и 143А увеличиваются в ширину для повышения жесткости. Другими словами, опорные рамы 132 и 142 можно легко двигать возвратно-поступательно.
Как показано на Фиг.17, каждая из упругих стоек 133В и 143В может быть выполнена с возможностью иметь конический профиль, у которого верх (сторона внутренних лезвий) более широкая, чем низ. Это может повышать жесткость верхней части, более вероятно подвергая ее действию крутящего момента в направлении Х вперед-назад, в то же время как можно больше предотвращая, чтобы упругие стойки 133А и 143А становились тяжело деформируемыми.
Кроме того, в данном варианте осуществления приводной стержень 42, приводящий в действие триммерное лезвие 41а (см. Фиг.8 и 9), прикреплен к участку 142а крепления внутренних лезвий. Как описано выше, участки 132а и 142а крепления внутренних лезвий соединены с приводными стержнями 134 и 144, соответственно.
Первый приводной элемент 130 двигает возвратно-поступательно внутреннее лезвие 54а и чистовое внутреннее лезвие 54b, прикрепленные совместно к приводному стержню 134, а второй приводной элемент 140 двигает возвратно-поступательно внутреннее лезвие 54а, внутреннее щелевое лезвие 54с, совместно прикрепленные к приводному стержню 144 и приводному стержню 42.
В данном варианте осуществления внутреннее лезвие 54а (включая основание 56а), приводящий стержень 134, чистовое внутреннее лезвие 54b (включая основание 56b) и описываемый далее регулятор 150 равновесия служат в качестве соединительного звена, которое соединено с первым приводным элементом 130, чтобы действовать совместно с первым приводным элементом 130 возвратно-поступательным образом. Соединительное звено и первый приводной элемент 130 составляют первый приводной блок 200.
С другой стороны, внутреннее лезвие 54d (включая основание 56d), внутреннее щелевое лезвие 54с (включая основание 56с), приводной стержень 144, приводной стержень 42 и описываемый далее регулятор 160 равновесия служат в качестве соединительного звена, которое соединено со вторым приводным элементов 140, чтобы работать совместно со вторым приводным элементом 140 возвратно-поступательным образом. Соединительное звено и второй приводной элемент 140 составляют второй приводной блок 210.
В данном варианте осуществления внутренние лезвия 54 расположены по два на передней и задней сторонах оси С вращения поворотного двигателя 110, а передние два внутренних лезвия совершают возвратно-поступательные движения в фазе, противоположной задним двум внутренним лезвиям. За счет осуществления возвратно-поступательных движений первого и второго приводных элементов 130 и 140 в противоположных фазах таким образом уменьшается вибрация вследствие силы инерции в направлении осуществления возвратно-поступательных движений (момент, создаваемый вокруг оси Х).
Подобные возвратно-поступательные движения в противоположных фазах могут уменьшать момент вокруг оси Х, но создают моменты (М1 и М2 на Фиг.11В) вокруг оси С вращения поворотного двигателя 110 в том же самом направлении (по часовой стрелке на Фиг.11В).
Соответственно в данном варианте осуществления первый и второй приводные блоки 200 и 210 выполнены с возможностью включения в себя участков 220 и 230 регулировки равновесия, находящихся на противоположных сторонах оси С вращения поворотного двигателя 110 от первого и второго приводных элементов 130 и 140, соответственно.
Конкретно регуляторы 150 и 160 равновесия прикреплены к первому и второму приводным элементам 130 и 140 удерживающими рычагами 132с и 142с, соответственно помещенными между ними.
За счет прикрепления регуляторов 150 и 160 равновесия к первому и второму приводным элементам 130 и 140, как описано выше, центры G1 и G2 тяжести первого и второго приводных блоков 200 и 201 могут быть установлены ближе к оси С вращения поворотного двигателя 110, чем в отсутствии регуляторов 150 и 160 равновесия, уменьшая таким образом вибрацию вокруг оси С вращения. Кроме того, когда первый и второй приводные блоки 200 и 210 осуществляют возвратно-поступательные движения в противоположных фазах в состоянии, когда регуляторы 150 и 160 равновесия прикреплены к первому и второму приводным элементам 130 и 140, на первом и втором приводных элементах 130 и 140 вокруг оси С вращения возникают моменты, являющиеся противоположными моментам М1 и М2 (М3 и М4 на Фиг.11В), соответственно. Коротче говоря, моменты М1 и М3 гасятся, и гасятся моменты М2 и М4. Соответственно вибрация вокруг оси С вращения может быть уменьшена.
Регуляторы 150 и 160 равновесия образованы отдельно от первого и второго приводных элементов 130 и 140, соответственно.
В данном варианте осуществления участки 220 и 230 регулировки равновесия предоставлены таким образом, что центры G1 и G2 тяжести первого и второго приводных блоков 200 и 210 располагаются между упругими стойками 133 и 143 (в интервале, обозначенном d3 на Фиг.9), если смотреть в направлении Y вправо-влево (в направлении возвратно-поступательных движений приводных элементов).
Таким образом, центры G1 и G2 тяжести первого и второго приводных блоков 200 и 201, вследствие этого, могут быть установлены ближе к оси С вращения поворотного двигателя 110. Это может уменьшать момент, который будет возникать вокруг оси С вращения поворотного двигателя 110 при приведении в движение, уменьшая таким образом вибрацию.
Если первый и второй приводные блоки 200 и 210 выполнены, в частности, таким образом, чтобы центры G1 и G2 их тяжести соответствовали оси С вращения поворотного двигателя 110, соответственно, момент вокруг оси С вращения поворотного двигателя 110 может быть сделан нулевым, а возникновение вибрации может быть дополнительно снижено.
В данном варианте осуществления регулятор 150 равновесия прикреплен к удерживающим рычагам (рычажным участкам) 132с, которые располагаются горизонтально от обоих концов опорной рамы 132, в направлении по ширине (направление Y вправо-влево) в сторону противоположного второго приводного элемента 140 (назад в направлении вперед-назад).
С другой стороны, регулятор 160 равновесия прикреплен к удерживающим рычагам (рычажным участкам) 142с, которые расположены горизонтально от обоих концов горизонтальной стенки 142j опорной рамы 142 в направлении по ширине (направление Y вправо-влево) в сторону находящегося напротив первого приводного элемента 130 (вперед в направлении вперед-назад).
Таким образом, удерживающие рычаги (рычажные участки) 132с, тянущиеся от первого приводного элемента 130, и удерживающие рычаги (рычажные участки) 142с, тянущиеся от второго приводного элемента 140, расположены в различных положениях в направлении Z вверх-вниз (направлении, ортогональном к направлению Х, в котором расположены первый и второй приводные элементы 130 и 140, направлению Y их возвратно-поступательного движения). В данном варианте осуществления удерживающие рычаги (рычажные участки) 132с и 142с тянутся в направлении Х вперед-назад на разных высотах в направлении вверх-вниз. За счет расположения таким образом удерживающих рычагов (рычажных участков) 132с и 142с на различных высотах в направлении вверх-вниз, уменьшают размеры первого и второго приводных блоков 200 и 210.
В данном варианте осуществления, кроме того, удерживающие рычаги (рычажные участки) 142с из удерживающих рычагов (рычажных участков) 132с и 142с выполнены с возможностью посадки над конверсионным механизмом 180 в направлении Z вверх-вниз. Предоставляя возможность посадки таким образом, по меньшей мере, одной из пары удерживающих рычагов (рычажных участков) 132с и пары удерживающих рычагов 142с над конверсионным механизмом 180 в направлении Z вверх-вниз, дополнительно уменьшают размеры первого и второго приводных блоков 200 и 210 (в направлении по высоте).
Удерживающие рычаги (рычажные участки) 132с и удерживающие рычаги (рычажные участки) 142с сами по себе служат в качестве, соответственно, участков 220 и 230 регулировки равновесия. В данном варианте осуществления участки 220 и 230 регулировки равновесия включают в себя удерживающие рычаги 132с и 142с, тянущиеся от первого и второго приводных элементов 130 и 140 в направлении противоположных сторон поперек оси С вращения поворотного двигателя 110 от первого и второго приводных элементов 130 и 140, соответственно.
Соответственно, если первый и второй приводные элементы 130 и 140 не снабжены регуляторами 150 и 160 равновесия, но снабжены удерживающими рычагами 132с и 142с, соответственно, центры G1 и G2 тяжести первого и второго приводных блоков 200 и 210 могут быть установлены ближе к оси С вращения поворотного двигателя 110, чем в отсутствии участков 220 и 230 регулировки равновесия. Другими словами, появление вибрации может быть уменьшено даже без регуляторов 150 и 160 равновесия за счет правильной установки длины и массы удерживающих рычагов 132с и 142с.
В торцевых поверхностях удерживающих рычагов 132с первого приводного элемента 130 образованы резьбовые отверстия 132е, а в регуляторе 150 равновесия образованы крепежные отверстия 151 в позициях, соответствующих резьбовым отверстиям 132е. Резьбовые отверстия 132е первого приводного элемента 130 приводят в соответствие с крепежными отверстиями регулятора 150 равновесия, а затем винты 171 ввинчивают в резьбовые отверстия 132е первого приводного элемента 130, прикрепляя таким образом регулятор 150 равновесия к первому приводному элементу 130. Если коротко, регулятор 150 равновесия прикрепляют к первому приводному элементу 130 спереди в направлении Х расположения первого и второго приводных элементов 130 и 140.
На переднем конце удерживающего рычага 142с второго приводного элемента 140 предоставлен соединительный рычаг 142k, соединяющий удерживающие рычаги 142, с расположением в направлении Y вправо-влево. В центре соединительного рычага 142k в направлении по ширине предоставлено резьбовое отверстие 142е. В положении, соответствующем резьбовому отверстию 142е в регуляторе 160 равновесия, образовано крепежное отверстие 161. Резьбовое отверстие 142е второго приводного элемента 140 приводят в сообщение с крепежным отверстием 161, а затем винт 172 ввинчивают в резьбовые отверстия 142е, прикрепляя и удерживая таким образом регулятор 160 равновесия на втором приводном элементе 140.
Поскольку регулятор 160 равновесия крепят ко второму приводному элементу 140 сзади первого приводного элемента 130 (с передней стороны в направлении Х вперед-назад), а регулятор 150 равновесия крепят к первому приводному элементу 130 сзади второго приводного элемента 140 (сзади в направлении Х вперед-назад), регуляторы 150 и 160 равновесия могут быть прикреплены после того, как были собраны первый и второй приводные элементы 130 и 140 и поворотный двигатель 110. соответственно, это может облегчить крепление регуляторов 150 и 160 равновесия.
Регуляторы 150 и 160 равновесия предоставлены в наиболее крайних положениях приводных элементов 130 и 140 (на обоих концах в направлении Х вперед-назад), соответственно. В данном варианте осуществления, как показано на Фиг.9, регуляторы 150 и 160 равновесия предоставлены для первого и второго приводных элементов 130 и 140 (одного из элементов) таким образом, чтобы, по меньшей мере, частично выступать из первого и второго приводных элементов 130 и 140 (другого элемента) на противоположных сторонах к первому и второму приводным элементам 130 и 140 (одному элементу), соответственно. Вследствие этого становится возможно сделать максимальным расстояние между регуляторами 150 и 160 равновесия (расстояние между осью С вращения и каждым центром тяжести), предотвращая в то же время увеличение размеров первого и второго приводных блоков 200 и 210. Соответственно массы регуляторов 150 и 160 равновесия могут быть уменьшены. Более того, поскольку массы регуляторов 150 и 160 равновесия могут быть уменьшены, могут быть дополнительно уменьшены размеры регуляторов 150 и 160 равновесия. Это может предотвратить дополнительное увеличение размеров первого и второго приводных блоков 200 и 210.
Как показано на Фиг.10, регуляторы 150 и 160 равновесия частично расположены внутри наиболее удаленных от центра участков приводных элементов 130 и 140 (оба конца в направлении Х вперед-назад). Это предотвращает сильное выступание регуляторов 150 и 160 равновесия наружу из первого и второго приводных элементов 130 и 140. Кроме того, за счет расположения регуляторов 150 и 160 равновесия только немного внутри первого и второго приводных элементов 130 и 140, можно предотвратить сдвиг внутрь положений точек действия (центров тяжести) регуляторов 150 и 160 равновесия.
Поскольку регуляторы 150 и 160 равновесия расположены в наиболее удаленных участках приводных элементов 130 и 140, регуляторы 150 и 160 равновесия могут быть прикреплены без ограничения по причине форм первого и второго приводных элементов 130 и 140. Вследствие этого становится возможным повышение свободы выбора форм первого и второго приводных элементов 130 и 140. Кроме того, в данном варианте осуществления регуляторы 150 и 160 равновесия имеют различные формы для того, чтобы иметь центры тяжести в положениях, оптимальных для первого и второго приводных блоков 200 и 210.
Говоря конкретно, регулятор 150 равновесия образован посредством складывания по существу y-образного пластинчатого звена, а упомянутые выше крепежные отверстия 151 образованы на обоих концах верхней части в направлении по ширине. С другой стороны, регулятор 160 равновесия представляет собой пластинчатое звено, имеющее по существу Т-образный передний профиль, а упомянутое выше крепежное отверстие 161 образовано по существу в центре.
За счет предоставления крепежных отверстий 151 и крепежного отверстия 161 в разных положениях по высоте регуляторы 150 и 160 равновесия располагаются по существу в одном и том же положении по высоте при прикреплении к первому и второму приводным элементам 130 и 140, так что размеры первого и второго приводных блоков 200 и 210 могут быть уменьшены.
В данном варианте осуществления регуляторы 150 и 160 равновесия прикреплены к первому и второму приводным элементам 130 и 140 таким образом, что направления толщины пластинчатообразных регуляторов 150 и 160 равновесия совпадают с направлением Х вперед-назад, соответственно. Вследствие этого становится возможным сделать максимальным расстояние между точками действия регуляторов 150 и 160 равновесия (расстояние между каждым центром тяжести и осью С вращения), предотвращая в то же время увеличение размера в направлении Х вперед-назад, уменьшая таким образом размеры первого и второго приводных блоков 200 и 210. Кроме того, в данном варианте осуществления как на правой, так и на левой сторонах регулятора 150 равновесия образованы выемки 152, и как на правой, так и на левой сторонах регулятора 160 равновесия образованы выемки 162.
С другой стороны, в удерживающих рычагах 132с первого приводного элемента 130 образованы выступы 132d, которые выполнены с возможностью вхождения в зацепление с выемками 152 регулятора 150 равновесия. Кроме того, в удерживающих рычагах 142с второго приводного элемента 140 образованы выступы 142d, которые выполнены с возможностью вхождения в зацепление с выемками 162 регулятора 160 равновесия. Данные зацепления обеспечивают возможность соответствующего позиционирования и крепления регуляторов 150 и 160 равновесия к приводным элементам 130 и 140 для того, чтобы они не двигались вверх, вниз, вправо и влево.
Как показано на Фиг.18, вместо выступов 132d удерживающие рычаги могут быть снабжены крючками 132i, так чтобы регулятор 150 равновесия входил в зацепления с крючками 132i. В качестве альтернативы регуляторы равновесия могут быть прикреплены к приводным элементам термосвариванием. Кроме того, вместо выемок можно предоставить отверстия так, чтобы выступы удерживающих рычагов входили в зацепление с отверстиями.
В данном варианте осуществления участки 220 и 230 регулировки равновесия, предоставленные для первого и второго приводных элементов 130 и 140 (одного приводного элемента), расположены таким образом, чтобы удерживающие рычаги 132с и 142с и регуляторы 150 и 160 равновесия (по меньшей мере, часть каждого из участков 220 и 230 регулировки равновесия) располагались немного в пространствах, образованных в первом и втором приводных элементах 130 и 140 (другом элементе), соответственно. Это предотвращает помехи со стороны удерживающих рычагов 132с и 142с для приводных элементов 130 и 140, обращенных к ним, и предотвращает увеличение размера, соответственно, пары приводных элементов 130 и 140.
Конкретно, первый и второй приводные элементы 130 и 140 собирают друг с другом таким образом, чтобы удерживающие рычаги 132с первого приводного элемента 130 проходили сквозь пространство плеча второго приводного элемента 140 (над горизонтальной стенкой 142j), а удерживающие рычаги 142с второго приводного элемента 140 проходили сквозь пространство под первым приводным элементом 130 (пространство между парой упругих стоек 133: соответствующее описанному далее окну 132h в данном варианте осуществления).
Кроме того, в данном варианте осуществления предоставлено окно 132h, которое позволяет видеть конверсионный механизм 180.
Конкретно пара упругих стоек 133 и опорная рама 132 первого приводного элемента 130 образованы в форме ворот, чтобы предоставить окно 132h, окруженное парой упругих стоек 133 и опорной рамой 132 с трех сторон, предоставляя таким образом возможность видеть внутреннюю часть (конверсионный механизм 180) в направлении Х вперед-назад. Предоставление окна 132h в таком виде облегчает работу по сборке приводных блоков и работу по проверке узла конверсионного механизма 180.
И еще в дополнение, в данном варианте осуществления с окном 132g предоставлен первый приводной элемент 130. Окно 132g состоит из опорной рамы 132 и удерживающих рычагов 132с для того, чтобы предоставить возможность видеть внутреннюю часть (конверсионный механизм 180) в направлении Z вверх-вниз. Более того, второй приводной элемент 140 снабжен окном 142g, которое состоит из удерживающих рычагов 142с и соединительного рычага 142k и предоставляет возможность видеть внутреннюю часть (конверсионный механизм 180) в направлении Z вверх-вниз. Позволяя видеть внутреннюю часть (конверсионный механизм 180) в направлении Z вверх-вниз, дополнительно облегчают сборочные и проверочные работы.
В данном варианте осуществления регуляторы 150 и 160 равновесия изготовлены из металла (материала, более плотного, чем первый и второй приводные элементы 130 и 140). Вследствие этого размеры регуляторов 150 и 160 равновесия могут быть уменьшены, и могут быть уменьшены размеры секции 3 головки в целом. В данном варианте осуществления, который описан выше, регуляторы 150 и 160 равновесия предоставлены в водонепроницаемом пространстве (герметичном пространстве) 80, герметизированном для того, чтобы предотвратить срезку волос организма внутренними лезвиями 54 или попадание воды, используемой для промывки внутренних лезвий 54. Это может предотвратить образование ржавчины на регуляторах 150 и 160 равновесия, изготовленных из металла.
В данном варианте осуществления упругие стойки 133 и 134 расположены таким образом, что центральные участки упругих стоек 133 и 134 в направлении Х вперед-назад (промежуточная линия в направлении, ортогональном направлению возвратно-поступательного движения и направлению крепления: средняя линия D, показанная на Фиг.9) находятся ближе к линии E действия противодействующей силы, создаваемой поднимающими пружинами (активизирующими звеньями) 132b и 142b, чем к оси С вращения поворотного двигателя 110 (d1<d2), если смотреть в направлении Y вправо-влево (направлении возвратно-поступательного движения приводных элементов). Предоставление упругих стоек 133 и 143 ближе к линии Е действия противодействующей силы благодаря поднимающим пружинам 132b и 142b в таком виде, может уменьшить моменты вокруг оси Y, создаваемые упругими стойками 133 и 143 за счет противодействующей силы, благодаря поднимающим пружинам 132b и 142b. соответственно. Вследствие этого предотвращается поломка упругих стоек 133 и 134 за счет концентрации напряжений. Когда упругие стойки 133 и 134 предоставляют в стороне от оси С вращения поворотного двигателя 110, моменты вокруг оси С вращения, создаваемые в упругих стойках 133 и 134, увеличиваются. В данном варианте осуществления, однако, противодействующие силы благодаря поднимающим пружинам 132b и 142b являются большими, и установка d1<d2 может уменьшить влияние вибрации на устройство в целом.
В приводных элементах 130 и 140 для укрепления образованы стенки 132f и 142f, соответственно. В данном варианте осуществления внутри линии Е действия противодействующей силы благодаря поднимающей пружине 132b (назад от линии Е действия в направлении Х вперед-назад) образована стенка 132f. Внутри линии Е действия противодействующей силы благодаря поднимающей пружине 142b (вперед от линии Е действия в направлении Х вперед-назад) образована стенка 142f.
Образуя стенки 132f и 142f внутри линий Е действия противодействующих сил благодаря поднимающим пружинам 132b и 142b в таком виде, становится возможно уменьшить влияние момента вокруг оси Y благодаря стенкам 132f и 142f, предотвращая в то же время деформацию противодействующими силами приводных элементов 130 и 140 благодаря поднимающим пружинам 132b и 142b.
Стенка 132f является более короткой, чем упругая стойка 133 для того, чтобы не загораживать окно 132h. Окно 132h закрывают за счет прикрепления регулятора 160 равновесия. Это может предотвратить утечку шума, создаваемого приводными элементами.
Как описано выше, в данном варианте осуществления первый и второй приводные блоки 200 и 210 выполнены с возможностью включения в себя участков 220 и 230 регулировки равновесия, расположенных на противоположных сторонах оси С вращения поворотного двигателя 110 от первого и второго приводных элементов 130 и 140, соответственно.
Соответственно центры G1 b G2 тяжести первого и второго приводных блоков 200 и 210 могут быть установлены ближе к линии С вращения поворотного двигателя 110, чем при отсутствии участков 220 и 230 регулировки равновесия. Другими словами, становится возможно сократить расстояние между осью С вращения поворотного двигателя 110 и центром тяжести каждого приводного блока, а вследствие этого, уменьшить момент вокруг оси С вращения в каждом приводном элементе. Это поможет уменьшить вибрацию электробритвы 1, совершающей возвратно-поступательные движения, включающей в себя множество приводных элементов, расположенных бок о бок.
Выше описан предпочтительный вариант осуществления настоящего изобретения. Однако настоящее изобретение не ограничено упомянутым выше вариантом осуществления, и могут быть сделаны различные модификации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОБРИТВА | 2006 |
|
RU2381893C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ЭНЕРГИИ И МЕХАНИЗИРОВАННАЯ КОЛЫБЕЛЬ | 2018 |
|
RU2778743C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКЛЮЧЕНИЯ ЭЛЕКТРИЧЕСКОГО ТОКА | 2013 |
|
RU2587544C1 |
| ФОРМОВОЧНЫЙ БАРАБАН | 2014 |
|
RU2625238C2 |
| ЭФФЕКТИВНЫЕ СИЛЬНОТОЧНЫЕ ЧАШЕОБРАЗНЫЕ ТРУБЧАТЫЕ ПРОВОДНИКИ | 2009 |
|
RU2497253C2 |
| УСТРОЙСТВО ДЛЯ АВАРИЙНОЙ ЭВАКУАЦИИ | 2011 |
|
RU2558517C2 |
| СИСТЕМА И СПОСОБ СУШКИ ПЯТИСТОРОННИХ КОНТЕЙНЕРОВ | 2011 |
|
RU2520465C1 |
| БРИТВЕННАЯ СЕТКА БРИТВЫ ДЛЯ СУХОГО БРИТЬЯ | 2007 |
|
RU2370360C2 |
| СУШИЛЬНАЯ УСТАНОВКА | 2005 |
|
RU2354904C2 |
| ВЛОЖЕННЫЙ КЛАВИШНЫЙ УЗЕЛ | 2012 |
|
RU2593213C2 |





Электробритва 1 включает в себя поворотный двигатель 110, пару приводных элементов 130, 140, к которым по отдельности прикреплены внутренние лезвия 54, и конверсионный механизм 180, преобразующий вращательное движение поворотного двигателя 110 в возвратно-поступательное движение пары приводных элементов 130, 140. Каждый приводной элемент 130, 140 и соединительные звенья, соединенные с приводными элементами 130, 140, составляют приводные блоки 200, 210, которые включают в себя регуляторы 150, 160 равновесия, предоставленные на противоположных сторонах оси С вращения поворотного двигателя 110 от приводных элементов 130, 140, включенных в приводные блоки 200, 210, соответственно. Обеспечивается уменьшение вибрации приводных элементов. 11 з.п. ф-лы, 23 ил.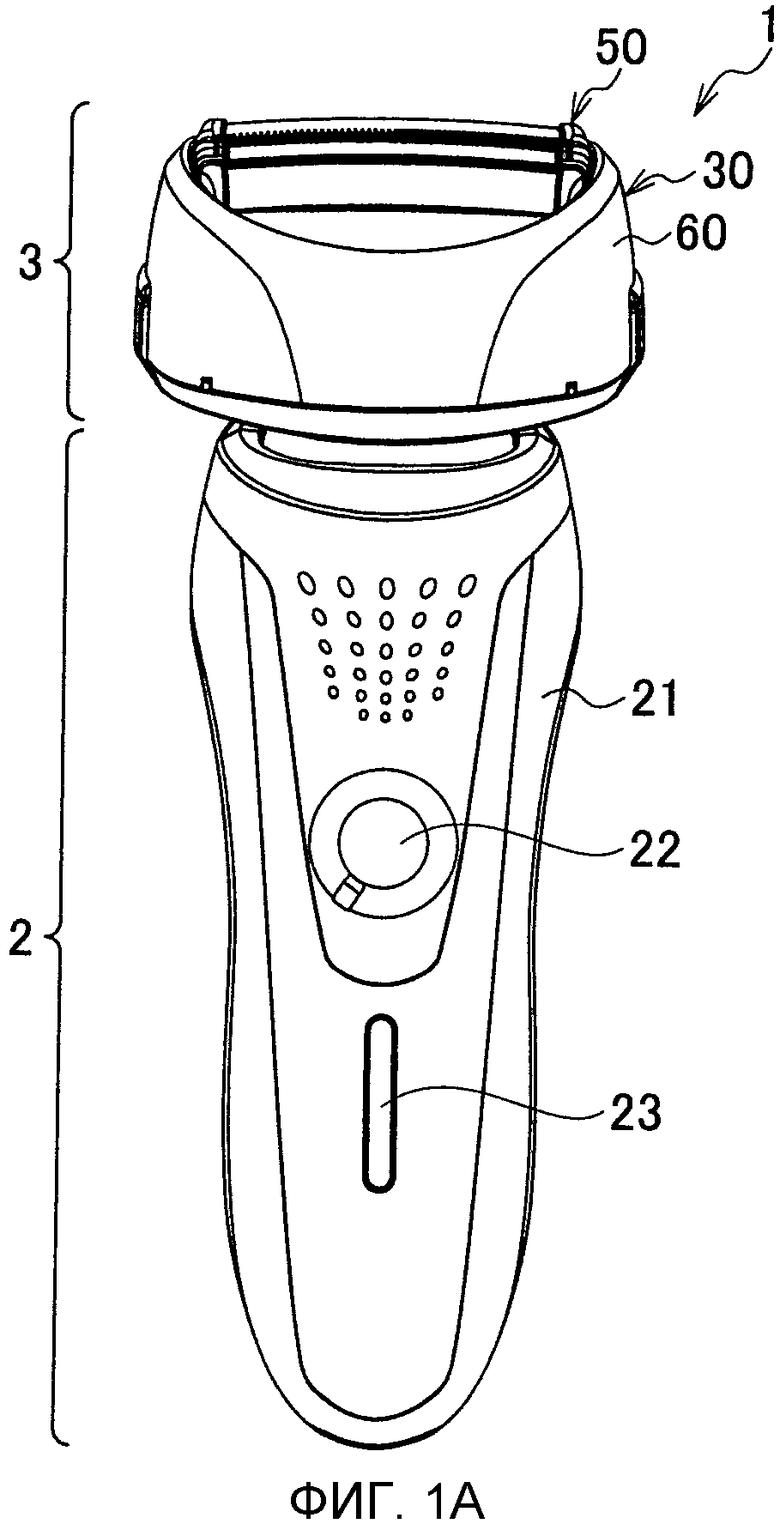
1. Электробритва, содержащая пару совершающих возвратно-поступательные движения приводных элементов, поворотный двигатель и конверсионный механизм, преобразующий вращательное движение поворотного двигателя в возвратно-поступательное движение, при этом пара приводных элементов совершает возвратно-поступательные движения в противоположных друг к другу фазах и по отдельности соединена с соединительными звеньями, действующими в сочетании с возвратно-поступательными движениями приводных элементов, причем каждый из приводных элементов и соединительное звено, соединенное с ним, составляют приводной блок, а каждый приводной блок включает в себя участок регулировки равновесия, расположенный на противоположной от приводного элемента, включенного в приводной блок, стороне оси вращения поворотного двигателя.
2. Электробритва по п.1, в которой участки регулировки равновесия включают в себя рычажный участок, проходящий от каждого приводного элемента к другой стороне приводного элемента относительно оси вращения поворотного двигателя.
3. Электробритва по п.2, в которой рычажные участки, проходящие от соответствующих приводных элементов, расположены в различных положениях в направлении, ортогональном направлению расположения приводных элементов и направлению возвратно-поступательного движения приводных элементов.
4. Электробритва по любому из пп.1-3, в которой, по меньшей мере, часть участка регулировки равновесия, предоставленного для одной из пар приводных элементов, находится в пространстве, образованном в другом приводном элементе.
5. Электробритва по любому из пп.1-3, в которой, по меньшей мере, часть каждого участка регулировки равновесия изготовлена из материала, имеющего более высокую плотность, чем плотность приводных элементов.
6. Электробритва по п.5, в которой каждый участок регулировки равновесия выполнен тонким в направлении расположения пары приводных элементов.
7. Электробритва по любому из пп.1-3, в которой пространство герметизировано для предотвращения внедрения волос тела, причем участки регулировки равновесия выполнены в герметизированном пространстве, при этом каждый из участков регулировки равновесия включает в себя регулятор равновесия, образованный отдельно от приводных элементов, и регуляторы равновесия по отдельности прикреплены к спаренным приводным элементам в направлении расположения спаренных приводных элементов.
8. Электробритва по любому из пп.1-3, в которой каждый из приводных элементов включает в себя окно, позволяющее видеть конверсионный механизм.
9. Электробритва по любому из пп.1-3, в которой каждый из участков регулировки равновесия обеспечен для одного из приводных элементов и выступает из другого приводного элемента на противоположной стороне к одному приводному элементу.
10. Электробритва по любому из пп.1-3, в которой в каждом приводном элементе образован участок крепления внутреннего лезвия, к которому прикреплено с возможностью снятия внутреннее лезвие, и образован участок упругой стойки, поддерживающий участок крепления внутреннего лезвия, обеспечивая ему возможность возвратно-поступательного движения, при этом участок крепления внутреннего лезвия снабжен активизирующим звеном, напрягающим внутреннее лезвие в направлении отсоединения внутреннего лезвия, а промежуточная линия участка упругой стойки в направлении, ортогональном направлению возвратно-поступательного движения и направлению отсоединения, расположена между осью вращения поворотного двигателя и линией действия противодействующей силы с помощью активизирующего звена в направлении возвратно-поступательного движения приводных элементов.
11. Электробритва по п.10, в которой промежуточная линия участка упругой стойки в направлении, ортогональном направлению возвратно-поступательного движения и направлению отсоединения, расположена ближе к линии действия, чем к оси вращения поворотного двигателя.
12. Электробритва по п.10, в которой центр тяжести каждого приводного блока расположен ближе к оси вращения поворотного двигателя, чем соответствующий участок упругих стоек в направлении возвратно-поступательного движения приводных элементов.
| JP 2004016524 А, 22.01.2004 | |||
| JP 2009232889 A, 15.10.2009 | |||
| JP 2009232894 A, 15.10.2009 | |||
| US 2008282576 A1, 20.11.2008 | |||
| Электробритва | 1975 |
|
SU719485A3 |

