Область техники
Настоящее изобретение относится к устройству измерения контактного усилия и способу измерения контактного усилия.
Уровень техники
На электрической железной дороге электроэнергия подается посредством приведения контактного провода и пантографа, являющегося токосъемником, расположенным на крыше, в соприкосновение друг с другом. В это время, усилие, называемое контактным усилием, формируется между пантографом и контактным проводом. Когда изменение в этом контактном усилии является большим, пантограф теряет контакт с контактным проводом, и возникает явление электрического разряда, называемое дугой. Когда возникает дуга, контактный провод изнашивается. Другими словами, предпочтительно, чтобы изменение в контактном усилии было небольшим. Кроме того, контактный провод также изнашивается, когда контактное усилие очень большое.
Соответственно, существует возрастающая необходимость в измерении контактного усилия для того, чтобы изучать способы предотвращения потери контакта или выполнять диагностику износа посредством измерения контактного усилия. Традиционно, предпринимались следующие способы, чтобы измерять контактное усилие.
(1) Способ, в котором датчик, такой как акселерометр или датчик деформации, помещается на пантограф, и усилие (поперечное усилие), сформированное в определенном поперечном сечении пантографа, и инерционная сила измеряются, чтобы получать контактное усилие (см. непатентный документ 1, перечисленный ниже).
(2) Способ, в котором два источника света, такие как LED, помещаются соответственно в верхней и нижней частях каждой из пружин пантографа, получается относительное смещение посредством обработки изображения, и получается величина вытягивания/сжатия пружины, чтобы получать контактное усилие (см. патентный документ 1, перечисленный ниже).
(3) Способ, в котором камера с датчиком с распределенным чувствительным элементом (далее в данном документе датчик с распределенным чувствительным элементом) помещается на крыше пантографа, пружинная часть пантографа захватывается, захваченное изображение обрабатывается, чтобы получать относительное смещение и величину вытягивания/сжатия каждой пружины, и, таким образом, получается контактное усилие (см. патентный документ 2, перечисленный ниже). Этот способ имеет более высокое разрешение во времени и пространственное разрешение, чем способ по пункту (2), и, таким образом, более точен.
Хотя содержимое обработки изображения не описано подробно в способе (3), описанном выше, относительное смещение и величина вытягивания/сжатия пружины может быть получена с помощью, например, способа, раскрытого в патентном документе 3, перечисленном ниже. В патентном документе 3, перечисленном ниже, белый маркер в форме ленты с высокой отражающей способностью прикрепляется к пантографу. Маркер захватывается датчиком с распределенным чувствительным элементом, помещенным на крыше вагона, и позиция маркера обнаруживается посредством сопоставления с шаблоном так, чтобы измерять смещение пантографа. Кроме того, предусматриваются две или более белые полосы, чтобы создавать более сложную форму. Таким образом, количество характеристик, использованных в сопоставлении с шаблоном, увеличивается, так что ошибочное обнаружение предотвращается.
Документы предшествующего уровня техники
Патентные документы
Патентный документ 1. Публикация японской патентной заявки № 2001-235310
Патентный документ 2. Публикация японской патентной заявки № 2008-185457
Патентный документ 3. Публикация японской патентной заявки № 2008-104312
Патентный документ 4. Публикация японской патентной заявки № 2008-109375
Непатентные документы
Непатентный документ 1: Икеда Митсуру "A Study on the Method of Measuring the Contact Force between Pantograph and Contact Wire (1st Report, Extension of the Frequency Range for Contact Force Measurement by an Improved Method of Evaluating the Pantograph Inertia Force), протоколы японского общества инженеров-машиностроителей. C, Том 70 (694), 16 июня Хэйсэй, сс.92-99.
Непатентный документ 2: Photonfocus AG, "Japanese User Manual MV-D1024 Series CMOS Area Scan Cameras", [онлайн] Photonfocus AG, [найдено 20-го января Хэйсей 21], Интернет, <URL: D1024_CL.pdf>
Сущность изобретения
Проблема, которая должна быть решена изобретением
Однако в способе размещения датчика или т.п. на пантографе, как в способе (1), существует необходимость прикрепления датчиков ко всем пружинным частям пантографа. Подъемная сила, которая не формируется в обычном состоянии, прикладывается к позиции, где каждый из датчиков прикреплен, и влияет на динамическую характеристику пантографа.
Кроме того, в случае пантографа с многократно разделенной контактной вставкой, число датчиков, которые должны быть размещены, становится большим, и, таким образом, на динамическую характеристику пантографа оказывается еще большее влияние. Изменение в динамической характеристике пантографа вызывает проблему того, что надежность контактного усилия, полученного с помощью размещаемых датчиков и т.п., уменьшается.
Наоборот, в способе (2), использующем обработку изображений, поскольку контактное усилие получается посредством обработки захваченного изображения, нет необходимости размещать датчики или т.п. на пантографе, и, таким образом, влияние на динамическую характеристику не оказывается. В способе (2) камера участка используется в качестве камеры для захвата изображения. Однако, когда используется камера участка, точность измерения контактного усилия является плохой, поскольку пространственное разрешение изображения является низким.
По этой причине, в способе (2) используется специальная линза, называемая супер анаморфотной линзой, которая вызывает увеличение в вертикальном направлении в 80 раз, чтобы решать эту проблему точности. Кроме того, поскольку используется камера участка, выходит, что даже пантограф с многократно разделенной контактной вставкой может быть измерен с помощью одной камеры. Однако, камера участка имеет низкое разрешение по времени. Таким образом, существует проблема в том, что измеряемый диапазон частот контактного усилия становится низким.
В способе (3) проблема способа (2) решается посредством использования линейного датчика. Линейный датчик имеет элементы получения изображения, размещенные одномерно, и способен захватывать одномерное изображение с высоким разрешением. Кроме того, линейный датчик является камерой с высокой частотой дискретизации. Соответственно, линейный датчик является камерой с высоким пространственным разрешением и разрешением по времени. Таким образом, линейный датчик имеет высокую точность контактного усилия и имеет большой измеряемый диапазон частот.
В случае пантографа с одним кронштейном или т.п., число линейных датчиков, которые должны быть размещены, является небольшим, поскольку существует только несколько пружин. Однако, в случае пантографа с многократно разделенной контактной вставкой, число пружин равно числу контактных пластин, и должно быть размещено такое же число линейных датчиков, что и число пружин. Следовательно, возникает проблема в том, что трудно пространственно размещать такое же число линейных датчиков, что и число пружин на крыше вагона.
Другими словами, как описано выше, традиционные способы не могут точно измерять контактное усилие как в пантографе с одним кронштейном или т.п., который имеет несколько пружин, так и в пантографе с многократно разделенной контактной вставкой, который имеет множество пружин.
В этом отношении, целью настоящего изобретения является предоставление устройства измерения контактного усилия и способа измерения контактного усилия, допускающих точное измерение контактного усилия как в пантографе с одним кронштейном или т.п., который имеет несколько пружин, так и в пантографе с многократно разделенной контактной вставкой, который имеет много пружин.
Средство для решения проблемы
Устройство измерения контактного усилия согласно первому изобретению для решения вышеупомянутой проблемы характеризуется наличием:
средства захвата изображения, которое захватывает изображение пружины пантографа, в то же время улучшая разрешение по времени посредством частичного указания области захвата изображения;
верхнего маркера и нижнего маркера, размещенных соответственно на верхней части и нижней части пружины;
средства обработки изображения, которое обнаруживает верхний маркер и нижний маркер в изображении посредством обработки изображения;
средства вычисления силы противодействия пружины, которое вычисляет относительное смещение на основе положений верхнего маркера и нижнего маркера, обнаруженных средством обработки изображения, вычисляет величину вытягивания/сжатия пружины посредством получения величины изменения по времени относительного смещения, и после этого умножает величину вытягивания/сжатия пружины на жесткость пружины, чтобы, таким образом, получать силу противодействия пружины;
средства вычисления инерционной силы, которое вычисляет ускорение посредством дифференцирования второго порядка смещения верхнего маркера, обнаруженного средством обработки изображения, и после этого умножает ускорение на эквивалентную массу пантографа, чтобы, таким образом, получать инерционную силу; и
средства вычисления контактного усилия, которое складывает силу противодействия пружины с инерционной силой, чтобы получать контактное усилие.
Устройство измерения контактного усилия согласно второму изобретению для решения вышеупомянутой проблемы характеризуется наличием:
множества средств захвата изображения, которые захватывают изображения пружины пантографа;
верхнего маркера и нижнего маркера, размещенных соответственно на верхней части и нижней части пружины;
средства перегруппирования, которое последовательно перегруппирует, на временной оси, изображения, захваченные множеством средств захвата изображения, с моментами синхронизации их затворов, сдвинутыми относительно друг друга;
средства обработки изображения, которое обнаруживает верхний маркер и нижний маркер в каждом из изображений посредством обработки изображения;
средства вычисления силы противодействия пружины, которое вычисляет относительное смещение на основе положений верхнего маркера и нижнего маркера, обнаруженных средством обработки изображения, вычисляет величину вытягивания/сжатия пружины посредством получения величины изменения по времени относительного смещения, и после этого умножает величину вытягивания/сжатия пружины на жесткость пружины, чтобы, таким образом, получать силу противодействия пружины;
средства вычисления инерционной силы, которое вычисляет ускорение посредством дифференцирования второго порядка смещения верхнего маркера, обнаруженного средством обработки изображения, и после этого умножает ускорение на эквивалентную массу пантографа, чтобы, таким образом, получать инерционную силу; и
средства вычисления контактного усилия, которое складывает силу противодействия пружины с инерционной силой, чтобы получать контактное усилие.
Устройство измерения контактного усилия согласно третьему изобретению для решения вышеупомянутой проблемы является устройством измерения контактного усилия согласно первому или второму изобретению, характеризуемым дополнительным наличием средства сплайновой интерполяции, которое устанавливает положения верхнего маркера и нижнего маркера, полученные средством обработки изображения, в качестве блоков позиционных данных и выполняет сплайновую интерполяцию по полученным блокам позиционных данных верхнего маркера и нижнего маркера.
Устройство измерения контактного усилия согласно четвертому изобретению для решения вышеописанной проблемы является устройством измерения контактного усилия согласно первому или второму изобретению, характеризуемым дополнительным наличием:
средства обработки сверхвысокого разрешения, которое формирует одно изображение с высоким разрешением посредством выполнения обработки сверхвысокого разрешения с использованием множества изображений с низким разрешением.
Способ измерения контактного усилия согласно пятому изобретению для решения вышеупомянутой проблемы характеризуется наличием:
этапа захвата изображения для захвата изображения верхнего маркера и нижнего маркера, размещенных соответственно в верхней части и нижней части пружины пантографа, в то же время улучшая разрешение по времени посредством частичного указания области захвата изображения;
этапа обработки изображения для обнаружения верхнего маркера и нижнего маркера в изображении посредством обработки изображения;
этапа вычисления силы противодействия пружины для вычисления относительного смещения на основе положений верхнего маркера и нижнего маркера, обнаруженных средством обработки изображения, вычисления величины вытягивания/сжатия пружины посредством получения величины изменения по времени относительного смещения, и затем умножения величины вытягивания/сжатия пружины на жесткость пружины, чтобы, таким образом, получать силу противодействия пружины;
этапа вычисления инерционной силы для вычисления ускорения посредством дифференцирования второго порядка смещения верхнего маркера, обнаруженного средством обработки изображения, и после этого умножения ускорения на эквивалентную массу пантографа, чтобы, таким образом, получать инерционную силу; и
этапа вычисления контактного усилия, на котором добавляют силу противодействия пружины к инерционной силе, чтобы получать контактное усилие.
Способ измерения контактного усилия согласно 6-му изобретению для решения вышеупомянутой проблемы характеризуется наличием:
множества этапов захвата изображения для захвата изображений верхнего маркера и нижнего маркера, размещенных соответственно на верхней части и нижней части пружины пантографа;
этапа перегруппирования для последовательного перегруппирования, на временной оси, изображений, захваченных множеством средств захвата изображения, с моментами синхронизации их затворов, сдвинутыми относительно друг друга;
этапа обработки изображения для обнаружения верхнего маркера и нижнего маркера в изображениях посредством обработки изображения;
этапа вычисления силы противодействия пружины для вычисления относительного смещения на основе положений верхнего маркера и нижнего маркера, обнаруженных средством обработки изображения, вычисления величины вытягивания/сжатия пружины посредством получения величины изменения по времени относительного смещения, и после этого умножения величины вытягивания/сжатия пружины на жесткость пружины, чтобы, таким образом, получать силу противодействия пружины;
этапа вычисления инерционной силы для вычисления ускорения посредством дифференцирования второго порядка смещения верхнего маркера, обнаруженного средством обработки изображения, и после этого умножения ускорения на эквивалентную массу пантографа, чтобы, таким образом, получать инерционную силу; и
этапа вычисления контактного усилия для добавления силы противодействия пружины к инерционной силе, чтобы получать контактное усилие.
Способ измерения контактного усилия согласно 7-му изобретению для решения вышеупомянутой проблемы является способом измерения контактного усилия согласно пятому или 6-му изобретению, характеризуемым дополнительным наличием этапа сплайновой интерполяции для установки положений верхнего маркера и нижнего маркера, полученных средством обработки изображения, в качестве блоков позиционных данных и выполнения сплайновой интерполяции по полученным блокам позиционных данных верхнего маркера и нижнего маркера, этап сплайновой интерполяции выполняется между этапом обработки изображения и этапом вычисления силы противодействия пружины.
Способ измерения контактного усилия согласно 8-му изобретению для решения вышеописанной проблемы является способом измерения контактного усилия согласно пятому или 6-му изобретению, характеризуемым дополнительным наличием:
этапа обработки сверхвысокого разрешения для формирования одного изображения с высоким разрешением посредством выполнения обработки сверхвысокого разрешения с использованием множества изображений с низким разрешением, этап обработки сверхвысокого разрешения выполняется между этапом захвата изображения и этапом обработки изображения.
Преимущества изобретения
Настоящее изобретение может предоставлять устройство измерения контактного усилия и способ измерения контактного усилия, которые могут точно измерять контактное усилие как в пантографе с одним кронштейном или т.п., который имеет несколько пружин, так и в пантографе с многократно разделенной контактной вставкой, который имеет много пружин.
Краткое описание чертежей
Фиг.1 - это схема конфигурации устройства измерения контактного усилия первого варианта осуществления.
Фиг.2 - это схема, показывающая пример изображения, захваченного камерой участка.
Фиг.3 - это блок-схема, показывающая способ измерения контактного усилия посредством обработки изображения с помощью камеры участка первого варианта осуществления.
Фиг.4 - это схема, показывающая способ улучшения разрешения по времени посредством сдвига моментов синхронизации затворов соответствующих множественных камер участка относительно друг друга во втором варианте осуществления.
Фиг.5 - это блок-схема, показывающая способ измерения контактного усилия второго варианта осуществления, в котором захваченные изображения перегруппируются.
Фиг.6 - это блок-схема, показывающая способ измерения контактного усилия второго варианта осуществления, в котором блоки позиционных данных каждого из маркеров перегруппируются.
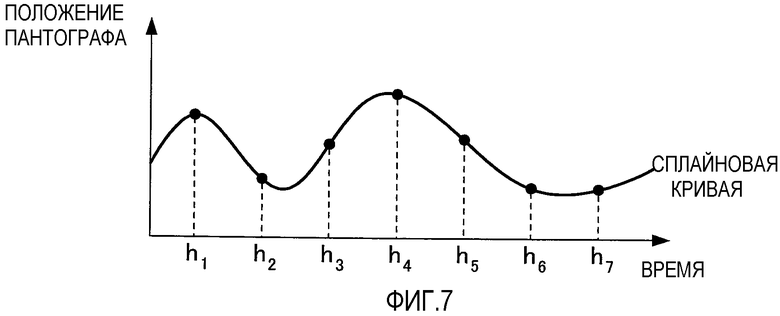
Фиг.7 - это схема, показывающая сплайновую интерполяцию.
Фиг.8 - это блок-схема, показывающая способ измерения контактного усилия третьего варианта осуществления, в котором добавлена обработка сплайновой интерполяции.
Фиг.9 - это блок-схема, показывающая способ измерения контактного усилия четвертого варианта осуществления, в котором применяется способ улучшения пространственного разрешения с помощью технологии сверхвысокого разрешения.
Режимы осуществления изобретения
Варианты осуществления устройства измерения контактного усилия и способа измерения контактного усилия настоящего изобретения будут описаны ниже со ссылкой на чертежи.
Вариант осуществления 1
Первый вариант осуществления устройства измерения контактного усилия и способа измерения контактного усилия настоящего изобретения будет описан ниже.
Сначала будет описана конфигурация устройства измерения контактного усилия этого варианта осуществления.
Устройство измерения контактного усилия и способ измерения контактного усилия этого варианта осуществления характеризуются тем, что только определенная область изображения, захваченного камерой участка, получается с высокой скоростью, и изображение этой области обрабатывается, чтобы выполнять измерение контактного усилия, в котором проблема разрешения по времени, описанная выше, разрешается.
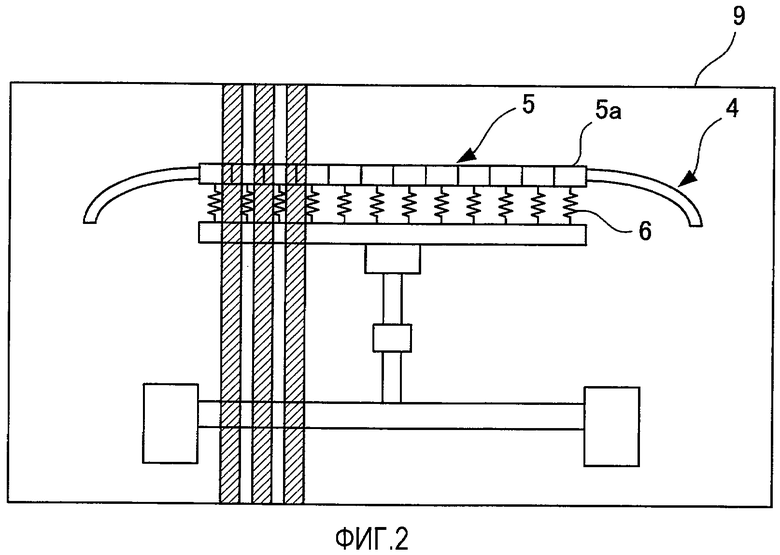
Фиг.2 - это схема, показывающая пример изображения, захваченного камерой участка.
Как показано на фиг.2, когда CMOS-камера используется в качестве камеры участка, например только части, показанные заштрихованными на фиг.2, могут быть предназначены для захвата в одном изображении 9 в области захвата изображения, получаемой при захвате с помощью обычной камеры. Часть, предназначенная для захвата, не одна в изображении 9, а много частей могут также быть указаны и захвачены, как показано на фиг.2 (см. "4.2 Reduction of Image Size" на стр. 16-19 в непатентном документе 2, упомянутом выше).
Фиг.1 - это схема конфигурации устройства измерения контактного усилия первого варианта осуществления.
Как показано на фиг.1, в устройстве измерения контактного усилия этого варианта осуществления, камера 2 участка помещается на крышу вагона 1, и источник 3 света помещается рядом с камерой 2 участка. Маркеры 7, каждый из которых имеет белый элемент с высокой отражающей способностью, расположенный на черном элементе с низкой отражающей способностью, прикрепляются соответственно на верхней и нижней частях каждой из пружин 6 контактной вставки 5 пантографа 4. Отметим, что форма белого элемента может быть любой характерной формой, такой как круг или квадрат, которая может быть легко извлечена при обработке изображения.
Как показано на фиг.1, в случае пантографа 4 с многократно разделенной контактной вставкой 5a, маркеры 7 прикрепляются к верхним и нижним частям всех пружин 6. Отметим, что в случае пантографа с одним кронштейном или т.п., который имеет несколько пружин, число маркеров 7, которые имеют меньшее число пружин, чем у пантографа 4 с многократно разделенной контактной вставкой 5a, меньше.
Кроме того, в устройстве измерения контактного усилия этого варианта осуществления, обрабатывающий PC 8, включающий в себя центральный процессор, память, такую как ROM и RAM, и средство ввода/вывода, размещается внутри вагона 1. В устройстве измерения контактного усилия этого варианта осуществления обрабатывающий PC 8 используется как средство выполнения различных видов обработки, такой как вычисление и сохранение данных. Обрабатывающий PC 8 соединяется с камерой 2 участка, и данные изображения, захваченного камерой 2 участка, выводятся в обрабатывающий PC 8.
Вышеприведенное описание является конфигурацией устройства измерения контактного усилия этого варианта осуществления.
Далее будет описана работа устройства измерения контактного усилия этого варианта осуществления.
Сначала, источник 3 освещения освещает пантограф 4 с помощью света, и камера 2 участка захватывает пружины 6 пантографа 4. Затем захваченное изображение сохраняется в обрабатывающем PC 8.
Далее обрабатывающий PC 8 обрабатывает сохраненное изображение и обнаруживает части пружин 6 пантографа 4.
После этого, обрабатывающий PC 8 вычисляет относительное смещение от позиций верхней и нижней частей каждой из пружин 6, получает величину изменения относительного смещения и, таким образом, вычисляет величину вытягивания/сжатия пружины 6. Затем обрабатывающий PC 8 умножает величину вытягивания/сжатия пружины 6 на жесткость пружины и, таким образом, получает силу противодействия пружины 6.
Далее обрабатывающий PC 8 вычисляет ускорение посредством дифференцирования второго порядка смещения верхней части пружины 6. Затем обрабатывающий PC 8 умножает ускорение на эквивалентную массу пантографа 4 и, таким образом, получает инерционную силу.
Наконец, сила противодействия пружины и инерционная сила, полученные вышеописанными способами, складываются друг с другом, чтобы получать контактное усилие (см. патентный документ 2, перечисленный выше).
Вышеприведенное описание является работой устройства измерения контактного усилия этого варианта осуществления.
Далее будет описан способ измерения контактного усилия посредством обработки изображения с помощью камеры 2 участка этого варианта осуществления.
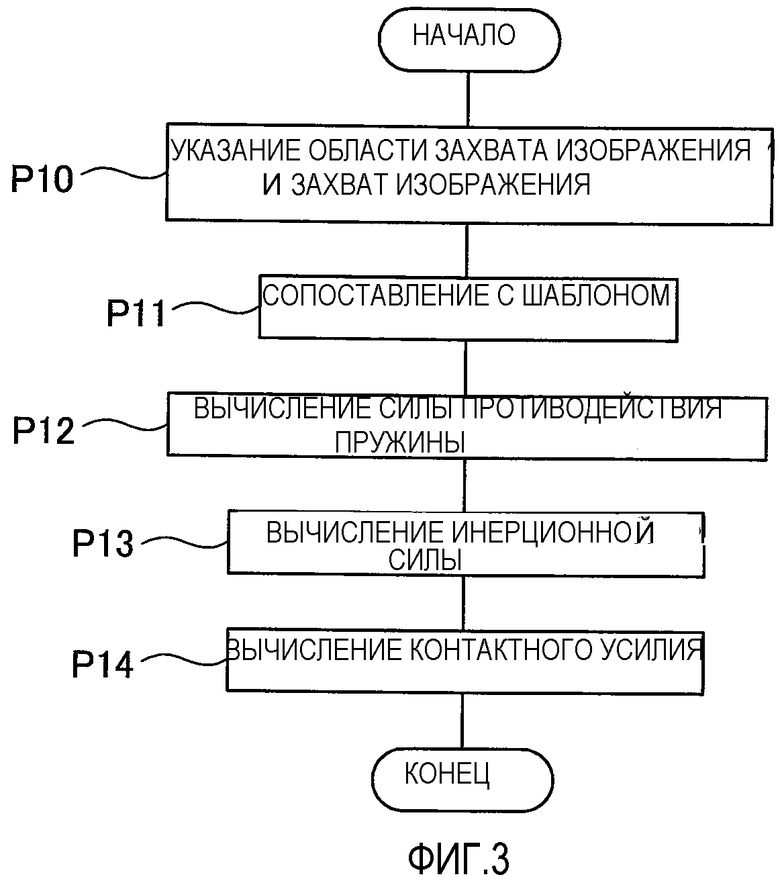
Фиг.3 - это блок-схема, показывающая способ измерения контактного усилия посредством обработки изображения с помощью камеры участка первого варианта осуществления.
Как показано на фиг.3, на этапе P10 область захвата изображения камеры 2 участка указывается, и камера 2 участка захватывает изображение. В это время область захвата изображения указывается так, что область, эквивалентная маркерам 7, размещенным на верхней и нижней частях пружин 6 пантографа 4, или область, большая, чем эта, может быть захвачена, и затем камера 2 участка захватывает изображение. Отметим, что частота кадров может быть увеличена, т.е. разрешение по времени может быть увеличено, посредством уменьшения области захвата изображения. Затем захваченное изображение сохраняется в обрабатывающем PC 8, размещенном внутри вагона 1.
На этапе P11 обрабатывающий PC 8 выполняет сопоставление с шаблоном с помощью образца маркеров 7, полученного заранее, так что части маркеров 7, прикрепленных к верхней и нижней частям пружин 6 пантографа 4, обнаруживаются из сохраненного изображения.
На этапе P12 обрабатывающий PC 8 вычисляет относительное смещение маркеров 7 на верхней и нижней частях каждой из пружин 6 пантографа 4, получает величину его изменения по времени и, таким образом, вычисляет величину вытягивания/сжатия пружины 6. Затем обрабатывающий PC 8 умножает величину вытягивания/сжатия пружины 6 на жесткость пружины и, таким образом, получает силу противодействия пружины 6.
На этапе P13 обрабатывающий PC 8 вычисляет ускорение посредством дифференцирования второго порядка смещения маркера 7 на верхней части пружины 6. Затем обрабатывающий PC 8 умножает ускорение на эквивалентную массу пантографа 4 и, таким образом, получает инерционную силу.
На этапе P14 обрабатывающий PC 8 добавляет силу противодействия пружины, полученную на этапе P12, к инерционной силе, полученной на этапе P13, чтобы получать контактное усилие.
Вышеприведенное описание является способом измерения контактного усилия посредством обработки изображения с помощью камеры 2 участка настоящего изобретения.
Как описано выше, в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления разрешение по времени может быть увеличено посредством указания области, которая должна быть захвачена камерой 2 участка. Таким образом, измеряемый диапазон частот может быть сделан выше, чем в способе, раскрытом в патентном документе 1, упомянутом выше.
Кроме того, поскольку камера 2 участка используется в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления, даже в случае пантографа 4 с многократно разделенной контактной вставкой 5a, показанной на фиг.2, контактное усилие может быть измерено без размещения множества линейных датчиков, как в способе, использующем линейные датчики, который раскрыт в патентном документе 2, упомянутом выше.
Кроме того, поскольку камера 2 участка используется в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления, даже в случае пантографа 4 с многократно разделенной контактной вставкой 5a, показанной на фиг.1, нет необходимости размещать такое же число камер, что и число пружин 6 пантографа 4, как в способе, использующем линейный датчик, который раскрыт в патентном документе 2, упомянутом выше.
Кроме того, поскольку изображение, захваченное камерой 2 участка, сохраняется в обрабатывающем PC 8 в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления, когда ошибка или т.п. возникает, ошибка или т.п. может быть проверена посредством фактического просмотра изображения части с ошибкой или т.п. Отметим, что в способе, использующем линейный датчик, таком как раскрытый в патентном документе 2, упомянутом выше, изображение, захваченное линейным датчиком, является одномерным изображением. Таким образом, только одна часть пантографа 4 может быть захвачена. Следовательно, весь пантограф не может быть просмотрен.
Кроме того, контактное усилие может быть точно измерено в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления, независимо от пантографа 4 с одним кронштейном или т.п., который имеет несколько пружин 6, или пантографа 4 с многократно разделенной контактной вставкой 5.
Вариант осуществления 2
Второй вариант осуществления устройства измерения контактного усилия и способа измерения контактного усилия настоящего изобретения будет описан ниже.
Устройство измерения контактного усилия и способ измерения контактного усилия этого варианта осуществления отличаются от устройства измерения контактного усилия и способа измерения контактного усилия первого варианта осуществления в том, что несколько камер 2 участка размещаются так, чтобы улучшать разрешение по времени.
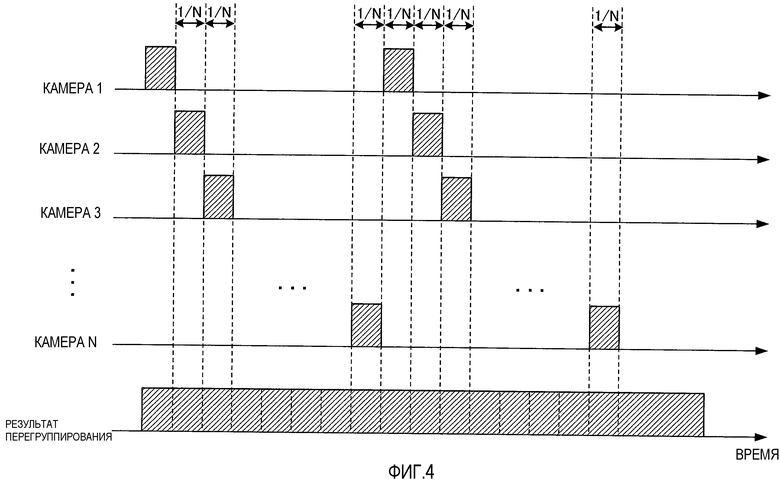
Фиг.4 - это схема, показывающая способ улучшения разрешения по времени посредством сдвига моментов синхронизации затворов соответствующих нескольких камер 2 участка относительно друг друга во втором варианте осуществления.
Как показано на фиг.4, в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления размещаются N камер 2 участка, и генератор импульсов используется, чтобы выполнять захват изображения, в то же время сдвигая каждый из моментов синхронизации затвора нескольких камер 2 участка от следующего на 1/N цикла, моменты затвора показаны в заштрихованных областях на фиг.4. Затем, как показано в качестве результата на фиг.4, захваченные изображения последовательно перегруппируются на оси времени, и, таким образом, частота кадров может быть умножена на N.
Далее приведено описание способа измерения контактного усилия этого варианта осуществления, в котором захваченные изображения последовательно размещаются, и после этого положения маркеров 7 получаются посредством сопоставления с шаблоном, чтобы вычислять контактное усилие.
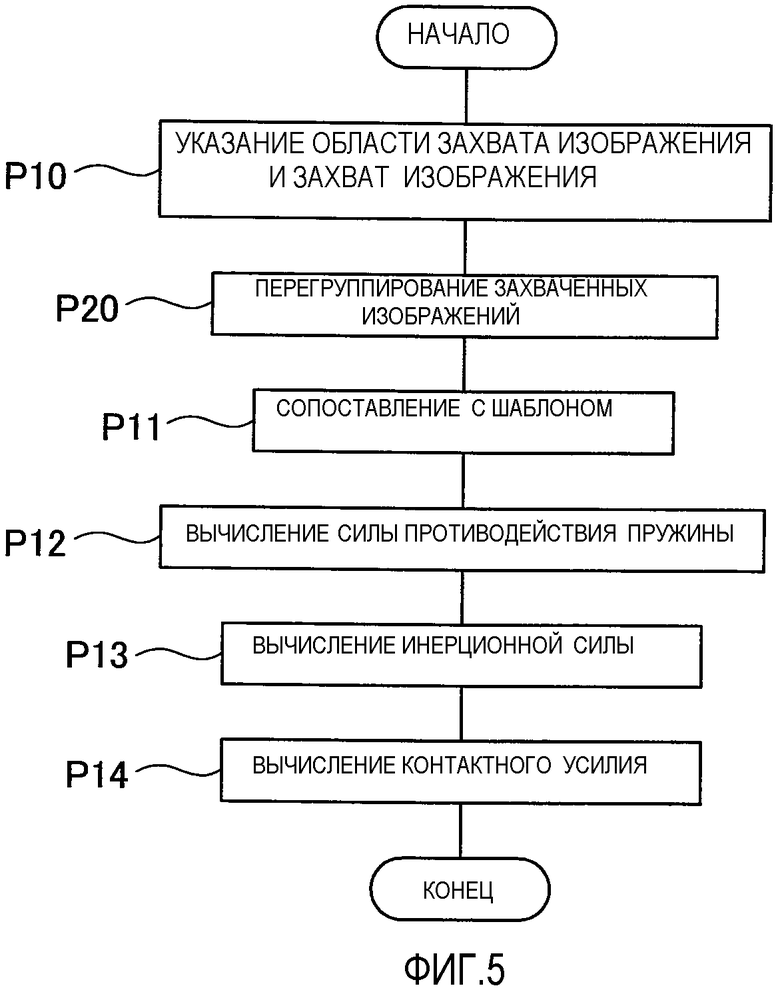
Фиг.5 - это блок-схема, показывающая способ измерения контактного усилия второго варианта осуществления, в котором захваченные изображения перегруппируются.
Как показано на фиг.5, после того как выполнен этап P10, как в первом варианте осуществления, на этапе P20 обрабатывающий PC 8 последовательно перегруппирует изображения, захваченные множественными камерами 2 участка, на оси времени, как описано выше. После того как этап P20 выполнен, выполняются этапы P11-P14 как в первом варианте осуществления.
Вышеприведенное описание является способом измерения контактного усилия второго варианта осуществления, в котором захваченные изображения перегруппируются.
Далее приведено описание способа измерения контактного усилия, в котором блоки позиционных данных каждого из маркеров 7 получаются из изображений, захваченных множественными камерами 2 участка, посредством сопоставления с шаблоном, полученные блоки позиционных данных маркера 7 сохраняются в памяти обрабатывающего PC 8, и сохраненные блоки позиционных данных маркера 7 последовательно перегруппируются, чтобы вычислять контактное усилие. Отметим, что блоки позиционных данных маркера 7 могут восприниматься как блоки позиционных данных верхней и нижней частей соответствующей пружины 6.
Фиг.6 - это блок-схема, показывающая способ измерения контактного усилия второго варианта осуществления, в котором блоки позиционных данных каждого из маркеров 7 перегруппируются.
Как показано на фиг.6, после того как этапы P10 и P11 выполнены, как в первом варианте осуществления, на этапе P21 обрабатывающий PC 8 устанавливает положения маркера 7 в качестве блоков позиционных данных, положения получаются на этапе P10 из изображений, захваченных множеством камер 2 участка, посредством выполнения сопоставления с шаблоном, как описано выше. Затем полученные блоки позиционных данных маркера 7 сохраняются в памяти обрабатывающего PC 8. После этого сохраненные блоки позиционных данных маркера 7 последовательно перегруппируются, и, таким образом, вычисляется контактное усилие. После того как этап P21 выполнен, выполняются этапы P12-P14, как в первом варианте осуществления.
Вышеприведенное описание является способом измерения контактного усилия второго варианта осуществления, в котором блоки позиционных данных маркера 7 перегруппируются.
Способ измерения контактного усилия, показанный на фиг.5, в котором захваченные изображения перегруппируются, и способ измерения контактного усилия, показанный на фиг.6, в котором блоки позиционных данных маркера 7 перегруппируются, отличаются друг от друга в том, что блоки данных, которые должны быть обработаны, являются блоками данных изображения или блоками цифровых данных, но результаты, полученные в конечном счете, являются одинаковыми. Однако обработка перегруппирования блоков цифровых данных в способе измерения контактного усилия, показанном на фиг.6, в котором блоки позиционных данных маркера 7 перегруппируются, требует более короткого времени обработки, чем обработка перегруппирования блоков данных изображения в способе измерения контактного усилия, показанном на фиг.5, в котором захваченные изображения перегруппируются.
Как описано выше, в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления N камер 2 участка размещаются, и захват изображения выполняется, сдвигая в то же время каждый из моментов синхронизации затворов множества камер 2 участка от следующего на 1/N цикла. Таким образом, разрешение по времени улучшается в N раз по сравнению с устройством измерения контактного усилия и способа измерения контактного усилия первого варианта осуществления. Кроме того, улучшение в разрешении по времени позволяет повысить измеряемый диапазон частот контактного усилия по сравнению с устройством измерения контактного усилия и способом измерения контактного усилия первого варианта осуществления.
Вариант осуществления 3
Третий вариант осуществления устройства измерения контактного усилия и способа измерения контактного усилия настоящего изобретения будет описан ниже.
В устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления разрешение по времени дополнительно улучшается посредством выполнения сплайновой интерполяции по блокам позиционных данных каждого из маркеров 7, полученных в устройствах измерения контактного усилия и способах измерения контактного усилия вариантов 1 и 2 осуществления, и посредством оценки положения маркера 7 между блоками данных. Улучшая, таким образом, разрешение по времени, измеряемый диапазон частот контактного усилия может быть сделан даже более высоким.
Далее будет описана сплайновая интерполяция.
Фиг.7 - это схема, показывающая сплайновую интерполяцию. Отметим, что на фиг.7 горизонтальная ось представляет время, а вертикальная ось представляет смещение пантографа.
Как показано на фиг.7, сплайновая интерполяция - это следующий способ интерполяции данных. Когда получены точки h1-h7 на графике, вычисляется такая сплайновая кривая, которая проходит через все точки.
Кроме того, в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления разрешение по времени, равное или лучшее, чем в случае размещения N камер 2 участка, может быть достигнуто без размещения N камер 2 участка, как в устройстве измерения контактного усилия и способе измерения контактного усилия второго варианта осуществления. Таким образом, число камер 2 участка, размещенных на крыше вагона 1, может быть уменьшено.
Фиг.8 - это блок-схема, показывающая способ измерения контактного усилия третьего варианта осуществления, в котором добавлена обработка сплайновой интерполяции.
Как показано на фиг.8, после того как этапы P10 и P11 выполнены, как в первом варианте осуществления, на этапе P30 обрабатывающий PC 8 устанавливает положения каждого из маркеров 7 в качестве блоков позиционных данных, положения получаются из сопоставления с шаблоном на этапе P10, как описано выше. Затем обрабатывающий PC 8 выполняет сплайновую интерполяцию по полученным блокам позиционных данных маркера 7 и оценивает положение маркера 7 между частями данных. После того как этап P30 выполнен, обрабатывающий PC 8 выполняет этапы P12-P14, как в первом варианте осуществления.
Отметим, что когда обработка сплайновой интерполяции добавляется к устройству измерения контактного усилия и способу измерения контактного усилия второго варианта осуществления, обработка сплайновой интерполяции добавляется перед вычислением силы противодействия пружины на этапе P12 (см. фиг.5 и 6).
Как описано выше, в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления число камер 2 участка, которые должны быть размещены, может быть уменьшено по сравнению с устройствами измерения контактного усилия и способами измерения контактного усилия первого и второго вариантов осуществления посредством выполнения сплайновой интерполяции. Кроме того, даже если число камер 2 участка уменьшается, разрешение по времени, равное или лучшее, чем в устройствах измерения контактного усилия и способах измерения контактного усилия первого и второго вариантов осуществления, может быть достигнуто посредством выполнения сплайновой интерполяции. Кроме того, улучшение в разрешении по времени позволяет измеряемому диапазону частот контактного усилия быть более высоким, чем в устройствах измерения контактного усилия и способах измерения контактного усилия первого и второго вариантов осуществления.
Вариант осуществления 4
Четвертый вариант осуществления устройства измерения контактного усилия и способа измерения контактного усилия настоящего изобретения будет описан ниже.
Устройство измерения контактного усилия и способ измерения контактного усилия этого варианта осуществления отличаются от устройства измерения контактного усилия и способа измерения контактного усилия первого варианта осуществления в том, что пространственное разрешение изображения, захваченного камерой 2 участков, улучшается посредством использования технологии сверхвысокого разрешения. Отметим, что конфигурация устройства измерения контактного усилия этого варианта осуществления является такой же, что и в первом варианте осуществления.
Далее будет описана технология сверхвысокого разрешения.
Технология сверхвысокого разрешения относится к технологии, в которой одно изображение с высоким разрешением формируется с использованием множества изображений с низким разрешением (см. патентный документ 4, перечисленный выше). Улучшая, таким образом, пространственное разрешение, величина вытягивания/сжатия каждой из пружин 6 и ускорение могут быть точно получены. В результате точность контактного усилия улучшается.
Фиг.9 - это блок-схема, показывающая способ измерения контактного усилия четвертого варианта осуществления, в котором применяется способ улучшения пространственного разрешения с помощью технологии сверхвысокого разрешения.
Как показано на фиг.9, после того как этап P10 выполнен, как в первом варианте осуществления, на этапе P40 обрабатывающий PC 8 выполняет обработку сверхвысокого разрешения с использованием множества изображений с низким разрешением и формирует одно изображение высокого разрешения, как описано выше. После того как этап P40 выполнен, обрабатывающий PC 8 выполняет этапы P11-P14, как в первом варианте осуществления.
Добавляя обработку сверхвысокого разрешения, как описано выше, пространственное разрешение изображения может быть улучшено. Улучшая, таким образом, пространственное разрешение, высота пантографа 4 может быть точно вычислена. Соответственно, величина вытягивания/сжатия каждой из пружин 6 и ускорение пантографа 4 могут быть точно получены. Следовательно, точность измерения контактного усилия может быть улучшена.
Отметим, что, когда обработка сверхвысокого разрешения добавляется к устройству измерения контактного усилия и способу измерения контактного усилия второго варианта осуществления, обработка сверхвысокого разрешения добавляется перед сопоставлением с шаблоном на этапе P11 (см. фиг.5 и 6).
Как описано выше, в устройстве измерения контактного усилия и способе измерения контактного усилия этого варианта осуществления пространственное разрешение улучшается посредством выполнения обработки сверхвысокого разрешения по захваченному изображению и увеличения его разрешения. Таким образом, точность измерения контактного усилия может быть улучшена.
Промышленная применимость
Настоящее изобретение может быть применено, например, к устройству измерения контактного усилия и способу измерения контактного усилия, в которых контактное усилие между контактным проводом и пантографом измеряется с помощью обработки изображения, и в частности, к устройству измерения контактного усилия и способу измерения контактного усилия, в которых изображение, захваченное камерой участка, обрабатывается, чтобы точно получать контактное усилие, когда существует несколько пружин, которые поддерживают верхнюю часть пантографа.
Пояснение ссылок с номерами
1 вагон
2 камера участка
3 источник света
4 пантограф
5 контактная вставка
5a многократно разделенная контактная вставка
6 пружина
7 маркер
8 обрабатывающий PC
9 изображение
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КОНТАКТНОГО УСИЛИЯ И УСТРОЙСТВО ИЗМЕРЕНИЯ КОНТАКТНОГО УСИЛИЯ | 2011 |
|
RU2519589C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВЫСОТЫ ПАНТОГРАФА | 2010 |
|
RU2478489C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЕРЕСЕЧЕНИЙ | 2009 |
|
RU2445571C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗНОСА КОНТАКТНОГО ПРОВОДА | 2007 |
|
RU2416068C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОГО УСКОРЕНИЯ ПАНТОГРАФА ПОСРЕДСТВОМ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 2009 |
|
RU2459213C1 |
| УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ 3D-МОДЕЛИ ОБЪЕКТА | 2015 |
|
RU2642167C2 |
| Способ определения величины контактных усилий | 2023 |
|
RU2819196C1 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2508604C2 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2543947C2 |
| СРАВНЕНИЕ ДВИЖУЩИХСЯ ОБЪЕКТОВ НА ОСНОВЕ ВЕКТОРА ДВИЖЕНИЯ | 2012 |
|
RU2602792C2 |



Группа изобретений относится к области электрифицированного железнодорожного транспорта. Изобретения предоставляют устройства и способы измерения контактного усилия между пантографом и контактным проводом. Изобретения способны точно измерять контактное усилие как в пантографе (4) с одним кронштейном, который имеет несколько пружин (6), так и в пантографе (4) с многократно разделенной контактной вставкой, который имеет много пружин (6). В устройстве измерения контактного усилия и способе измерения контактного усилия предусмотрено средство захвата изображения, сформированное из камеры (2) участка или т.п., которое захватывает изображение пружины (6) пантографа (4), в то же время улучшая разрешение по времени посредством частичного указания области захвата изображения. Устройство включает в себя средство обработки изображения, сформированное на персональном компьютере (8), которое обнаруживает пружину (6) в изображении посредством обработки изображения, и средство вычисления контактного усилия, сформированное на основе персонального компьютера (8), которое получает контактное усилие посредством сложения силы противодействия пружины (6), обнаруженной средством обработки изображения, с инерционной силой. Технический результат заключается в улучшении точности измерения контактного усилия между пантографом и контактным проводом и предотвращения потери контакта. 4 н. и 4 з.п. ф-лы, 9 ил.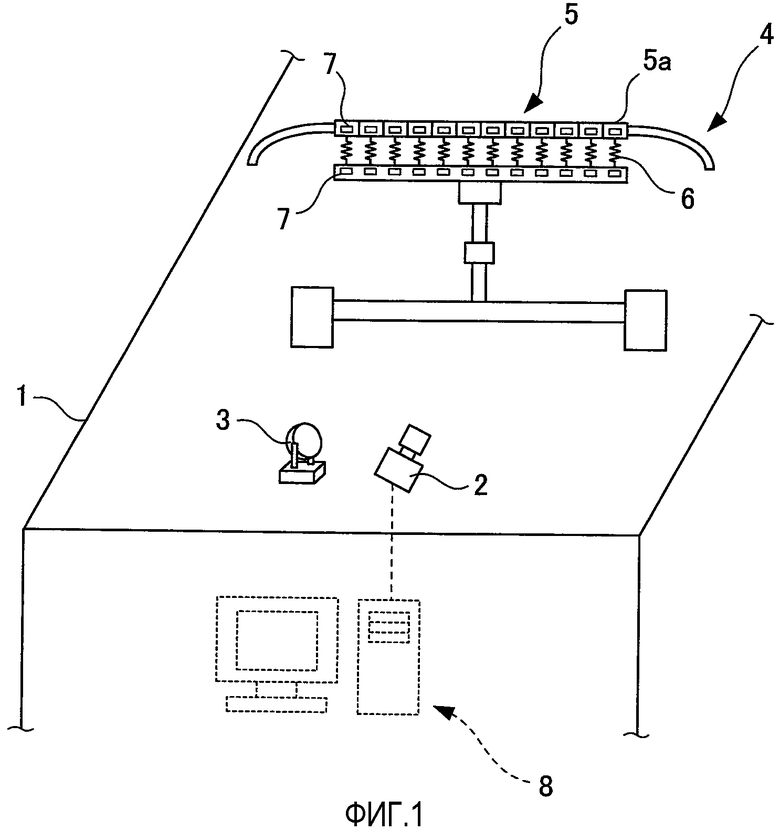
1. Устройство измерения контактного усилия, характеризуемое наличием:
средства захвата изображения, которое захватывает изображение пружины пантографа, в то же время улучшая разрешение по времени посредством частичного указания области захвата изображения;
верхнего маркера и нижнего маркера, размещенных соответственно на верхней части и нижней части пружины;
средства обработки изображения, которое обнаруживает верхний маркер и нижний маркер в изображении посредством обработки изображения;
средства вычисления силы противодействия пружины, которое вычисляет относительное смещение на основе положений верхнего маркера и нижнего маркера, обнаруженных средством обработки изображения, вычисляет величину вытягивания/сжатия пружины посредством получения величины изменения по времени относительного смещения и после этого умножает величину вытягивания/сжатия пружины на жесткость пружины, чтобы, таким образом, получать силу противодействия пружины;
средства вычисления инерционной силы, которое вычисляет ускорение посредством дифференцирования второго порядка смещения верхнего маркера, обнаруженного средством обработки изображения, и после этого умножает ускорение на эквивалентную массу пантографа, чтобы, таким образом, получать инерционную силу; и
средства вычисления контактного усилия, которое складывает силу противодействия пружины с инерционной силой, чтобы получать контактное усилие.
2. Устройство измерения контактного усилия, характеризуемое наличием:
множества средств захвата изображения, которые захватывают изображения пружины пантографа;
верхнего маркера и нижнего маркера, размещенных соответственно на верхней части и нижней части пружины;
средства перегруппирования, которое последовательно перегруппирует, на временной оси, изображения, захваченные множеством средств захвата изображения, с моментами синхронизации их затворов, сдвинутыми относительно друг друга;
средства обработки изображения, которое обнаруживает верхний маркер и нижний маркер в каждом из изображений посредством обработки изображения;
средства вычисления силы противодействия пружины, которое вычисляет относительное смещение на основе положений верхнего маркера и нижнего маркера, обнаруженных средством обработки изображения, вычисляет величину вытягивания/сжатия пружины посредством получения величины изменения по времени относительного смещения и после этого умножает величину вытягивания/сжатия пружины на жесткость пружины, чтобы, таким образом, получать силу противодействия пружины;
средства вычисления инерционной силы, которое вычисляет ускорение посредством дифференцирования второго порядка смещения верхнего маркера, обнаруженного средством обработки изображения и после этого умножает ускорение на эквивалентную массу пантографа, чтобы, таким образом, получать инерционную силу; и
средства вычисления контактного усилия, которое складывает силу противодействия пружины с инерционной силой, чтобы получать контактное усилие.
3. Устройство измерения контактного усилия по п.1 или 2, характеризуемое дополнительным наличием средства сплайновой интерполяции, которое устанавливает положения верхнего маркера и нижнего маркера, полученные средством обработки изображения, в качестве блоков позиционных данных и выполняет сплайновую интерполяцию по полученным блокам позиционных данных верхнего маркера и нижнего маркера.
4. Устройство измерения контактного усилия по п.1 или 2, характеризуемое дополнительным наличием средства обработки сверхвысокого разрешения, которое формирует одно изображение с высоким разрешением, выполняя обработку сверхвысокого разрешения с использованием множества изображений с низким разрешением.
5. Способ измерения контактного усилия, характеризуемый наличием:
этапа захвата изображения, на котором захватывают изображение верхнего маркера и нижнего маркера, размещенных соответственно в верхней части и нижней части пружины пантографа, в то же время улучшая разрешение по времени посредством частичного указания области захвата изображения;
этапа обработки изображения, на котором обнаруживают верхний маркер и нижний маркер в изображении посредством обработки изображения;
этапа вычисления силы противодействия пружины, на котором вычисляют относительное смещение на основе положений верхнего маркера и нижнего маркера, обнаруженных средством обработки изображения, вычисляют величину вытягивания/сжатия пружины посредством получения величины изменения по времени относительного смещения и после этого умножают величину вытягивания/сжатия пружины на жесткость пружины, чтобы, таким образом, получать силу противодействия пружины;
этапа вычисления инерционной силы, на котором вычисляют ускорение посредством дифференцирования второго порядка смещения верхнего маркера, обнаруженного средством обработки изображения, и после этого умножают ускорение на эквивалентную массу пантографа, чтобы, таким образом, получать инерционную силу; и
этапа вычисления контактного усилия, на котором складывают силу противодействия пружины с инерционной силой, чтобы получать контактное усилие.
6. Способ измерения контактного усилия, характеризуемый наличием:
множества этапов захвата изображения, на которых захватывают изображения верхнего маркера и нижнего маркера, размещенных соответственно на верхней части и нижней части пружины пантографа;
этапа перегруппирования, на котором последовательно перегруппируют, на временной оси, изображения, захваченные множеством средств захвата изображения, с моментами синхронизации их затворов, сдвинутыми относительно друг друга;
этапа обработки изображения, на котором обнаруживают верхний маркер и нижний маркер в изображениях посредством обработки изображения;
этапа вычисления силы противодействия пружины, на котором вычисляют относительное смещение на основе положений верхнего маркера и нижнего маркера, обнаруженных средством обработки изображения, вычисляют величину вытягивания/сжатия пружины посредством получения величины изменения по времени относительного смещения и после этого умножают величину вытягивания/сжатия пружины на жесткость пружины, чтобы, таким образом, получать силу противодействия пружины;
этапа вычисления инерционной силы, на котором вычисляют ускорение посредством дифференцирования второго порядка смещения верхнего маркера, обнаруженного средством обработки изображения и после этого умножают ускорение на эквивалентную массу пантографа, чтобы, таким образом, получать инерционную силу; и
этапа вычисления контактного усилия, на котором складывают силу противодействия пружины с инерционной силой, чтобы получать контактное усилие.
7. Способ измерения контактного усилия по п.5 или 6, характеризуемый дополнительным наличием этапа сплайновой интерполяции, на котором устанавливают положения верхнего маркера и нижнего маркера, полученные средством обработки изображения, в качестве блоков позиционных данных и выполняют сплайновую интерполяцию по полученным блокам позиционных данных пружины, этап сплайновой интерполяции выполняется между этапом обработки изображения и этапом вычисления силы противодействия пружины.
8. Способ измерения контактного усилия по п.5 или 6, характеризуемый дополнительным наличием этапа обработки сверхвысокого разрешения, на котором формируют одно изображение с высоким разрешением посредством выполнения обработки сверхвысокого разрешения с использованием множества изображений с низким разрешением, этап обработки сверхвысокого разрешения выполняется между этапом захвата изображения и этапом обработки изображения.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ ПРИЖИМА ТОКОСЪЕМНИКА | 1998 |
|
RU2199725C2 |
| Устройство для определения статического нажатия токоприемника | 1986 |
|
SU1368200A1 |
| Устройство для счета движущихся предметов | 1937 |
|
SU57684A1 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ РУЛОНОВ ИЗ ТОРЦОВЫХ ШАШЕК | 0 |
|
SU363623A1 |
| US 5115405 А, 19.05.1992. | |||

