ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству измерения высоты пантографа для измерения высоты пантографа с использованием обработки изображений.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В железнодорожных сооружениях колебания в высотах воздушных проводов должны находиться в пределах заданного диапазона значения, и измерение высот воздушных проводов можно назвать в качестве одного из элементов осмотра. Высота воздушного провода равна высоте пантографа, который является токосъемником, размещенным на крыше вагона. По этой причине традиционные и общеизвестные способы включают в себя получение высоты воздушного провода путем измерения высоты пантографа. Нижеследующее можно привести, например, в качестве таких способов измерения высоты пантографа.
(А) Способ с лазерным датчиком
Этот способ является способом, в котором высота пантографа измеряется с помощью: сканирования пантографа с помощью лазера, используя зеркало или т.п.; и исследования разности фаз между отраженными волнами, деформацию формы отраженного лазера или т.п.
(В) Способ с датчиком светового сечения
Этот способ является способом, в котором высота пантографа измеряется с помощью: проецирования света в виде полосок на пантограф; и приема света с зигзагообразными полосами, которые соответствуют форме пантографа.
(С) Способ обработки изображений
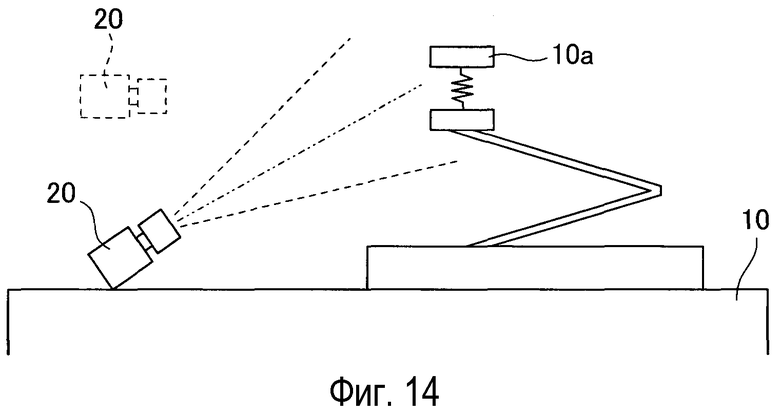
Этот способ является способом, в котором, как показано на фиг. 14, высота пантографа 10а измеряется с помощью: захвата изображения пантографа 10а с использованием фотокамеры 20 с линейным датчиком (в дальнейшем - линейный датчик), помещенной на крышу вагона 10; и затем выполнения обработки, например сопоставления с моделью или сопоставления с образцом, над изображением с использованием обрабатывающего компьютера 30 (см., например, Патентные документы 1 и 2).
Среди перечисленных выше способов способ обработки изображений состоит в том, что: положение пикселя в изображении, который совпадает с заранее подготовленной моделью пантографа 10а, извлекается из изображения пантографа 10а, захваченного линейным датчиком 20; затем фактическая высота пантографа 10a вычисляется из положения пикселя в изображении на основе расстояния от линейного датчика 20 до пантографа 10а, фокусного расстояния объектива у блока захвата изображений и т.п.
В этом способе обработки изображений линейный датчик 20 используется в качестве блока захвата изображений, чтобы увеличить пространственное разрешение и тем самым повысить точность. Этот способ позволяет устройству быть меньше, чем в способе с лазерным датчиком и в способе с датчиком светового сечения, приводя поэтому к преимуществу, что устройство может устанавливаться не только на испытательных вагонах, произведенных исключительно для измерения, но также и на служебных вагонах.
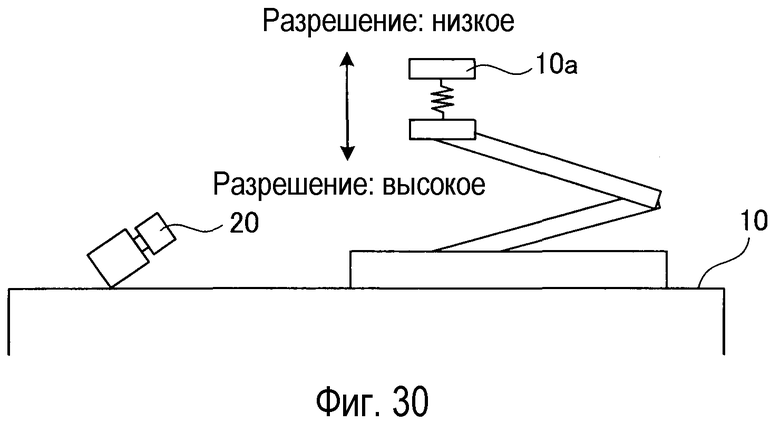
Между тем в случае использования способа в Патентном документе 2 линейный датчик 20 размещается в таком положении, чтобы быть обращенным наклонно вверх, как показано на фиг. 30. В этом случае разрешение отличается между пантографом 10a, помещенным в нижнее положение, и пантографом 10a, помещенным в верхнее положение, из-за соотношения между направлением перемещения пантографа 10a и углом возвышения линейного датчика 20. В частности, как показано на фиг. 30, разрешение выше в нижнем положении и ниже в верхнем положении. Между прочим, причина того, почему разрешение выше, когда пантограф 10a находится в нижнем положении, состоит в том, что пантограф 10a ближе по расстоянию к линейному датчику 20, находясь в нижнем положении.
ДОКУМЕНТЫ ИЗВЕСТНОГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
Патентный документ 1: Публикация заявки на патент Японии № 2006-250774
Патентный документ 2: Публикация заявки на патент Японии № 2008-104312
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, КОТОРЫЕ ДОЛЖНЫ БЫТЬ РЕШЕНЫ ИЗОБРЕТЕНИЕМ
В способе, использующем линейный датчик 20, если линейный датчик 20 размещается впереди пантографа 10a, как указано пунктирной линией на фиг. 14, разрешение почти постоянно в диапазоне изображения, в котором колеблется высота воздушного провода. Поэтому высоту пантографа 10a можно точно измерить. Однако если линейный датчик 20 размещается на такой же высоте, как и пантограф 10a, то это размещение может вызвать соприкосновение между линейным датчиком 20 и воздушным проводом 5, что может привести к крупной аварии.
По этой причине в реальном случае линейный датчик 20 размещается наклонно вниз от пантографа 10a, как указано сплошной линией на фиг. 14. Однако, когда линейный датчик 20 размещается, как указано сплошной линией на фиг. 14, оптическая ось линейного датчика 20 пересекает направление перемещения (вертикальное направление) пантографа 10a по диагонали, а не перпендикулярно. Это приводит к состоянию, где разрешение пантографа 10a в изображении, захваченном линейным датчиком 20, становится разным между пантографом 10a, помещенным в нижнее положение, и пантографом 10a, помещенным в верхнее положение. В частности, разрешение выше, когда пантограф 10a находится в нижнем положении, чем когда пантограф 10a находится в верхнем положении, потому что пантограф 10a ближе по расстоянию к линейному датчику 20, находясь в нижнем положении.
Например, в Патентном документе 2 высота пантографа 10a вычисляется с использованием коэффициента, указывающего отношения между фокусным расстоянием объектива фотокамеры у линейного датчика 20, положением (положением пикселя) пантографа 10a в изображении, захваченном линейным датчиком 20, и фактической высотой пантографа 10a.
Когда H представляет фактическую высоту пантографа 10a; P - положение пантографа 10a в изображении, захваченном линейным датчиком 20; n - размер пикселя; l - расстояние от линейного датчика 20 до пантографа 10a; и f - фокусное расстояние объектива линейного датчика 20, отношение между ними может выражаться следующим уравнением (1):
H:P×n=l:f ... (1).
(1).
Раскладывая его, получается следующее уравнение (2):
H=(l×P×n)/f...
(2).
Фактическая высота пантографа 10a получается с использованием этого уравнения (2). Однако фокусное расстояние f объектива, расстояние l от линейного датчика 20 до пантографа 10a и т.п. необходимо измерить заранее, чтобы выполнить такое вычисление, и это вызывает проблему плохой применимости.
Дополнительно, если линейный датчик 20 размещается в положении, указанном пунктирной линией на фиг. 14, расстояние l от линейного датчика 20 до пантографа 10a может поддерживаться постоянным. Однако, если линейный датчик 20 размещается в положении, указанном сплошной линией на фиг. 14, значение расстояния l будет меняться от одного положения пикселя к другому в изображении. Соответственно, выполнение вычисления с неизменным расстоянием l может вызвать ошибки в результатах вычисления. По этой причине, когда линейный датчик 20 размещается наклонно вниз от пантографа 10a, нужно выполнять вычисление для коррекции высоты с использованием проективного преобразования или т.п. Чтобы выполнить это вычисление, необходим угол возвышения линейного датчика 20, и нужно выполнять сложное вычисление.
В связи с вышеизложенным цель настоящего изобретения - предоставить устройство измерения высоты пантографа, которое дает возможность простой калибровки при измерении высоты пантографа.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ПРОБЛЕМ
Устройство измерения высоты пантографа в соответствии с первым изобретением для решения вышеупомянутых проблем включает в себя линейный датчик и средство обработки изображений и измеряет высоту пантографа на вагоне, который движется, при этом линейный датчик помещен на крышу вагона, а средство обработки изображений сконфигурировано для анализа изображения, захваченного линейным датчиком. Устройство измерения высоты пантографа отличается тем, что: калибровочный элемент, на котором области темного цвета и области светлого цвета размещаются поочередно в вертикальном направлении, предоставляется разъемно в диапазоне, включающем диапазон перемещения пантографа; и средство обработки изображений конфигурируется для получения выражения отношения, представляющего отношение между положениями областей темного цвета и областей светлого цвета в изображении и фактическими высотами областей темного цвета и областей светлого цвета, и вычисления фактической высоты пантографа из положения пантографа в изображении, которое захвачено линейным датчиком, с использованием выражения отношения, причем положения областей темного цвета и областей светлого цвета получаются из изображения калибровочного элемента, захваченного линейным датчиком.
Устройство измерения высоты пантографа в соответствии со вторым изобретением для решения вышеупомянутых проблем является устройством измерения высоты пантографа в соответствии с первым изобретением, отличающимся тем, что: элемент корректировки строки захвата изображения, имеющий множество областей первого цвета, объединенных в вертикальном направлении, и областей второго цвета, расположенных вокруг областей первого цвета, предоставляется разъемно к калибровочному элементу; устройство измерения высоты пантографа содержит средство отображения для отображения изображения, захваченного линейным датчиком; и формы областей первого цвета в элементе корректировки строки захвата изображения устанавливаются так, что ширины областей первого цвета и областей второго цвета, показанных на средстве отображения, меняются в зависимости от положения и наклона строки захвата изображения в линейном датчике.
Устройство измерения высоты пантографа в соответствии с третьим изобретением для решения вышеупомянутых проблем является устройством измерения высоты пантографа в соответствии со вторым изобретением, отличающимся тем, что области первого цвета образуются имеющими вертикальную ширину больше в горизонтальном центре, чем по обеим сторонам горизонтального центра таким образом, что области первого цвета соприкасаются с соседними областями первого цвета в горизонтальном центре элемента корректировки строки захвата изображения.
Устройство измерения высоты пантографа в соответствии с четвертым изобретением для решения вышеупомянутых проблем является устройством измерения высоты пантографа в соответствии с любым из изобретений с первого по третье, отличающимся тем, что средство обработки изображений включает в себя: блок создания входного изображения для создания входного изображения путем упорядочения в хронологическом порядке сигналов изображения, введенных от линейного датчика; блок бинаризации для создания двоичного изображения путем преобразования входного изображения в двоичную форму; блок обнаружения положения окрашенной области для обнаружения положений областей темного цвета и областей светлого цвета в двоичном изображении; и арифметический блок выражения отношения для отыскания выражения отношения на основе положений областей темного цвета и областей светлого цвета в двоичном изображении и фактических положений областей темного цвета и областей светлого цвета.
Устройство измерения высоты пантографа в соответствии с пятым изобретением для решения вышеупомянутых проблем является устройством измерения высоты пантографа в соответствии со вторым изобретением, отличающимся тем, что элемент корректировки строки захвата изображения включает в себя среднюю линию в горизонтальном центре элемента корректировки строки захвата изображения.
Способ калибровки для устройства измерения высоты пантографа в соответствии с шестым изобретением для решения вышеупомянутых проблем является способом калибровки для устройства измерения высоты пантографа, которое конфигурируется для захвата изображения пантографа на вагоне, который движется, посредством линейного датчика, помещенного на крышу вагона, и измерения высоты пантографа путем анализа изображения, захваченного линейным датчиком. Способ калибровки отличается тем, что содержит: первый этап помещения калибровочного элемента в окрестность пантографа, причем калибровочный элемент имеет области темного цвета и области светлого цвета, расположенные поочередно на его поверхности в вертикальном направлении; второй этап захвата изображения калибровочного элемента с помощью линейного датчика; и третий этап побуждения средства обработки изображений обнаружить положения областей темного цвета и областей светлого цвета в изображении, захваченном линейным датчиком, и определить выражение отношения, представляющее отношение между обнаруженными положениями областей темного цвета и областей светлого цвета в изображении и фактическими положениями областей темного цвета и областей светлого цвета.
Способ калибровки для устройства измерения высоты пантографа в соответствии с седьмым изобретением является способом калибровки для устройства измерения высоты пантографа в соответствии с шестым изобретением, отличающимся тем, что: элемент корректировки строки захвата изображения размещается на калибровочном элементе, причем элемент корректировки строки захвата изображения имеет несколько областей первого цвета одинаковой формы, которые объединяются вместе в вертикальном направлении, и области второго цвета расположены вокруг областей первого цвета, причем области первого цвета и области второго цвета располагаются таким образом, что ширины областей первого цвета и областей второго цвета, показанных на средстве отображения, меняются в зависимости от положения и наклона строки захвата изображения в линейном датчике; изображение элемента корректировки строки захвата изображения захватывается линейным датчиком; строка захвата изображения корректируется при проверке изображения элемента корректировки строки захвата изображения, показанного на средстве отображения для отображения изображения, захваченного линейным датчиком; элемент корректировки строки захвата изображения отделяется; и после этого выполняются первый, второй и третий этапы.
Способ калибровки для устройства измерения высоты пантографа в соответствии с восьмым изобретением для решения вышеупомянутых проблем является способом калибровки для устройства измерения высоты пантографа в соответствии с седьмым изобретением, отличающимся тем, что в элементе корректировки строки захвата изображения области первого цвета образуются имеющими вертикальную ширину больше в горизонтальном центре, чем по обеим сторонам горизонтального центра, таким образом, что области первого цвета соприкасаются с соседними областями первого цвета в горизонтальном центре элемента корректировки строки захвата изображения.
Способ калибровки для устройства измерения высоты пантографа в соответствии с девятым изобретением для решения вышеупомянутых проблем является способом калибровки для устройства измерения высоты пантографа в соответствии с любым из изобретений с шестого по восьмое, отличающимся тем, что средство обработки изображений: создает входное изображение путем упорядочения в хронологическом порядке сигналов изображения, введенных от линейного датчика; создает двоичное изображение путем преобразования входного изображения в двоичную форму; обнаруживает положения областей темного цвета и областей светлого цвета в двоичном изображении; и определяет выражение отношения на основе положений областей темного цвета и областей светлого цвета в двоичном изображении, а также фактических положений областей темного цвета и областей светлого цвета.
Способ калибровки для устройства измерения высоты пантографа в соответствии с десятым изобретением является способом калибровки для устройства измерения высоты пантографа в соответствии с шестым изобретением, отличающимся тем, что средняя линия предоставляется в горизонтальном центре элемента корректировки строки захвата изображения и строка захвата изображения корректируется на основе средней линии.
РЕЗУЛЬТАТЫ ИЗОБРЕТЕНИЯ
Устройство измерения высоты пантографа в первом изобретении является устройством измерения высоты пантографа, включающим линейный датчик, помещенный на крышу вагона, и средство обработки изображений для анализа изображения, захваченного линейным датчиком, и сконфигурировано для измерения высоты пантографа на вагоне, который движется. Устройство измерения высоты пантографа спроектировано таким образом, что: калибровочный элемент, на котором области темного цвета и области светлого цвета размещаются поочередно в вертикальном направлении, предоставляется разъемно в диапазоне, включающем диапазон перемещения пантографа; и средство обработки изображений конфигурируется для получения выражения отношения, представляющего отношение между положениями областей темного цвета и областей светлого цвета в изображении и фактическими высотами областей темного цвета и областей светлого цвета, и вычисления фактической высоты пантографа из положения пантографа в изображении, которое захвачено линейным датчиком, с использованием выражения отношения, причем положения областей темного цвета и областей светлого цвета получаются из изображения калибровочного элемента, захваченного линейным датчиком. Таким образом, с помощью анализа захваченного изображения калибровочного элемента выражение отношения, представляющее отношение между положениями областей темного цвета и областей светлого цвета в изображении и фактическими высотами областей темного цвета и областей светлого цвета, можно легко получить независимо от оператора, не заботясь о фокусном расстоянии объектива фотокамеры в линейном датчике, расстоянии от линейного датчика до пантографа, разрешении изображения, угле возвышения линейного датчика и т.п., при этом положение получается из захваченного изображения калибровочного элемента. Соответственно, даже если изображения нужно захватить с помощью линейного датчика, обращенного наклонно вверх, точность в измерении высоты пантографа можно повысить без выполнения сложных вычислений.
В соответствии с устройством измерения высоты пантографа во втором изобретении элемент корректировки строки захвата изображения, имеющий множество областей первого цвета, объединенных в вертикальном направлении, и областей второго цвета, расположенных вокруг областей первого цвета, предоставляется разъемно к калибровочному элементу; устройство измерения высоты пантографа содержит средство отображения для отображения изображения, захваченного линейным датчиком; и формы областей первого цвета в элементе корректировки строки захвата изображения устанавливаются так, что ширины областей первого цвета и областей второго цвета, показанных на средстве отображения, меняются в зависимости от положения и наклона строки захвата изображения в линейном датчике. Таким образом, в дополнение к полезному результату первого изобретения положение и ориентация строки захвата изображения в линейном датчике могут корректироваться просто и надежно, чтобы строка захвата изображения могла быть перпендикулярной пантографу. Соответственно, высоту пантографа можно измерить очень точно.
В соответствии с устройством измерения высоты пантографа согласно третьему изобретению в элементе корректировки строки захвата изображения области первого цвета образуются имеющими вертикальную ширину больше в горизонтальном центре, чем по обеим сторонам горизонтального центра таким образом, что области первого цвета соприкасаются с соседними областями первого цвета в горизонтальном центре элемента корректировки строки захвата изображения. Таким образом, чтобы строка захвата изображения была перпендикулярна пантографу, достаточно, чтобы положение и наклон строки захвата изображения корректировались таким образом, что области первого цвета отображаются на средстве отображения в виде непрерывной области. Соответственно, положение и наклон строки захвата изображения можно легко исправить.
В соответствии с устройством измерения высоты пантографа в четвертом изобретении средство обработки изображений включает в себя: блок создания входного изображения для создания входного изображения путем упорядочения в хронологическом порядке сигналов изображения, введенных от линейного датчика; блок бинаризации для создания двоичного изображения путем преобразования входного изображения в двоичную форму; блок обнаружения положения окрашенной области для обнаружения положений областей темного цвета и областей светлого цвета в двоичном изображении; и арифметический блок выражения отношения для отыскания выражения отношения на основе положений областей темного цвета и областей светлого цвета в двоичном изображении и фактических положений областей темного цвета и областей светлого цвета. Таким образом, можно спокойно выполнить обработку для получения выражения отношения, представляющего отношение между положением областей темного цвета и областей светлого цвета в изображении и фактическими высотами областей темного цвета и областей светлого цвета, при этом положения получаются из захваченного изображения калибровочного элемента.
В соответствии с устройством измерения высоты пантографа согласно пятому изобретению элемент корректировки строки захвата изображения включает в себя среднюю линию в горизонтальном центре элемента корректировки строки захвата изображения. Таким образом, можно объективно определить, подходит ли направление, в котором поворачивается линейный датчик, для корректировки наклона строки захвата изображения. Кроме того, корректировку можно сделать при просмотре захваченного изображения, не заботясь о фактическом вращении и горизонтальном перемещении линейного датчика. Кроме того, корректировку можно сделать простым и универсальным способом без необходимости какого-либо восприятия или опыта оператора. К тому же, поскольку точность калибровки увеличивается, высоту пантографа можно точно измерить.
Способ калибровки для устройства измерения высоты пантографа в соответствии с шестым изобретением является способом калибровки для устройства измерения высоты пантографа, которое конфигурируется для захвата изображения пантографа на вагоне, который движется, посредством линейного датчика, помещенного на крышу вагона, и измерения высоты пантографа путем анализа изображения, захваченного линейным датчиком. Способ калибровки включает в себя: первый этап помещения калибровочного элемента в окрестность пантографа, причем калибровочный элемент имеет области темного цвета и области светлого цвета, расположенные поочередно на его поверхности в вертикальном направлении; второй этап захвата изображения калибровочного элемента с помощью линейного датчика; и третий этап побуждения средства обработки изображений обнаружить положения областей темного цвета и областей светлого цвета в изображении, захваченном линейным датчиком, и определить выражение отношения, представляющее отношение между обнаруженными положениями областей темного цвета и областей светлого цвета в изображении и фактическими положениями областей темного цвета и областей светлого цвета. Таким образом, с помощью анализа захваченного изображения калибровочного элемента можно легко выполнить расчет выражения отношения, представляющего отношение между положениями областей темного цвета и областей светлого цвета в изображении и фактическими высотами областей темного цвета и областей светлого цвета, независимо от оператора и не заботясь о фокусном расстоянии объектива фотокамеры в линейном датчике, расстоянии от линейного датчика до пантографа, разрешении изображения, угле возвышения линейного датчика и т.п., при этом положения получаются из захваченного изображения калибровочного элемента. Соответственно, даже если изображения нужно захватить с помощью линейного датчика, обращенного наклонно вверх, точность в измерении высоты пантографа можно повысить без выполнения сложных вычислений.
В соответствии со способом калибровки для устройства измерения высоты пантографа в седьмом изобретении элемент корректировки строки захвата изображения размещается на калибровочном элементе, причем элемент корректировки строки захвата изображения имеет несколько областей первого цвета одинаковой формы, которые объединяются вместе в вертикальном направлении, и области второго цвета расположены вокруг областей первого цвета, причем области первого цвета и области второго цвета располагаются таким образом, что ширины областей первого цвета и областей второго цвета, показанных на средстве отображения, меняются в зависимости от положения и наклона строки захвата изображения в линейном датчике; изображение элемента корректировки строки захвата изображения захватывается линейным датчиком; строка захвата изображения корректируется при проверке изображения элемента корректировки строки захвата изображения, показанного на средстве отображения для отображения изображения, захваченного линейным датчиком; элемент корректировки строки захвата изображения отделяется; и после этого выполняются первый, второй и третий этапы. Таким образом, в дополнение к полезному результату пятого изобретения положение и ориентация строки захвата изображения в линейном датчике могут корректироваться просто и надежно, чтобы строка захвата изображения могла быть перпендикулярной пантографу. Соответственно, высоту пантографа можно измерить очень точно.
В соответствии со способом калибровки для устройства измерения высоты пантографа в восьмом изобретении в элементе корректировки строки захвата изображения области первого цвета образуются имеющими вертикальную ширину больше в горизонтальном центре, чем по обеим сторонам горизонтального центра, таким образом, что области первого цвета соприкасаются с соседними областями первого цвета в горизонтальном центре элемента корректировки строки захвата изображения. Таким образом, чтобы строка захвата изображения была перпендикулярна пантографу, достаточно, чтобы положение и наклон строки захвата изображения корректировались таким образом, что области первого цвета отображаются на средстве отображения в виде непрерывной области. Соответственно, положение и наклон строки захвата изображения можно легко исправить.
В соответствии со способом калибровки для устройства измерения высоты пантографа в девятом изобретении средство обработки изображений: создает входное изображение путем упорядочения в хронологическом порядке сигналов изображения, введенных от линейного датчика; создает двоичное изображение путем преобразования входного изображения в двоичную форму; обнаруживает положения областей темного цвета и областей светлого цвета в двоичном изображении; и определяет выражение отношения на основе положений областей темного цвета и областей светлого цвета в двоичном изображении, а также фактических положений областей темного цвета и областей светлого цвета. Таким образом, можно спокойно выполнить обработку для получения выражения отношения, представляющего отношение между положением областей темного цвета и областей светлого цвета в изображении, а также фактическими высотами областей темного цвета и областей светлого цвета, при этом положения получаются из захваченного изображения калибровочного элемента.
В соответствии со способом калибровки для устройства измерения высоты пантографа в десятом изобретении средняя линия предоставляется в горизонтальном центре элемента корректировки строки захвата изображения, и строка захвата изображения корректируется на основе этой средней линии. Таким образом, можно объективно определить, подходит ли направление, в котором поворачивается линейный датчик, для корректировки наклона строки захвата изображения. Кроме того, корректировку можно сделать при просмотре захваченного изображения, не заботясь о фактическом вращении и горизонтальном перемещении линейного датчика. Кроме того, корректировку можно сделать простым и универсальным способом без необходимости какого-либо восприятия или опыта оператора. К тому же, поскольку точность калибровки увеличивается, высоту пантографа можно точно измерить.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - схематическая конфигурационная схема, показывающая примерное применение устройства измерения высоты пантографа в Варианте 1 осуществления настоящего изобретения.
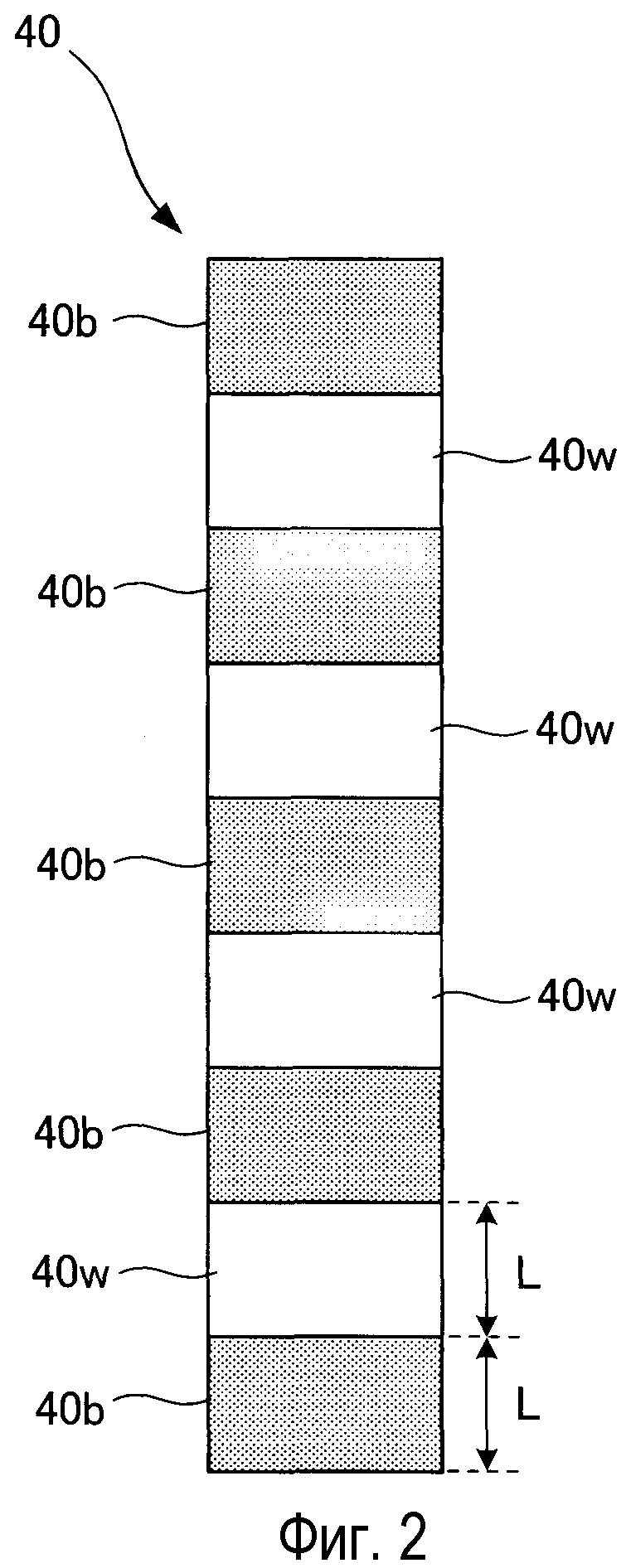
Фиг. 2 - поясняющая схема, показывающая пример калибровочного элемента в Варианте 1 осуществления настоящего изобретения.
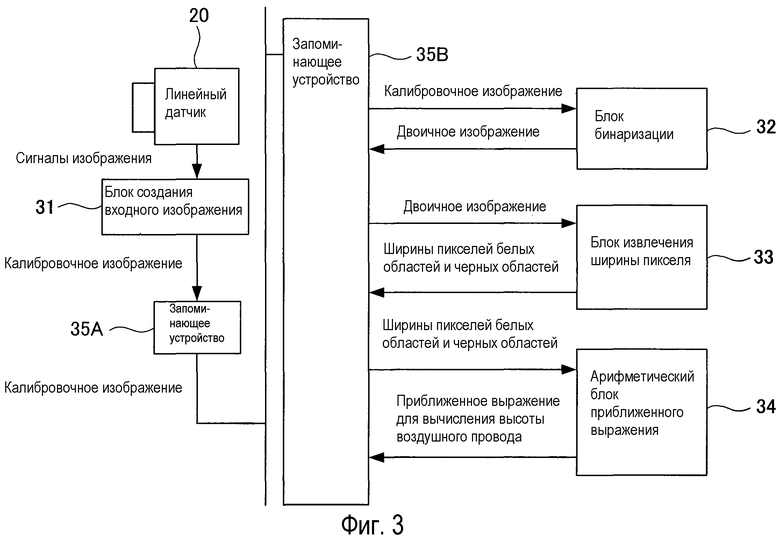
Фиг. 3 - блок-схема, показывающая схематическое строение обрабатывающего компьютера в Варианте 1 осуществления настоящего изобретения.
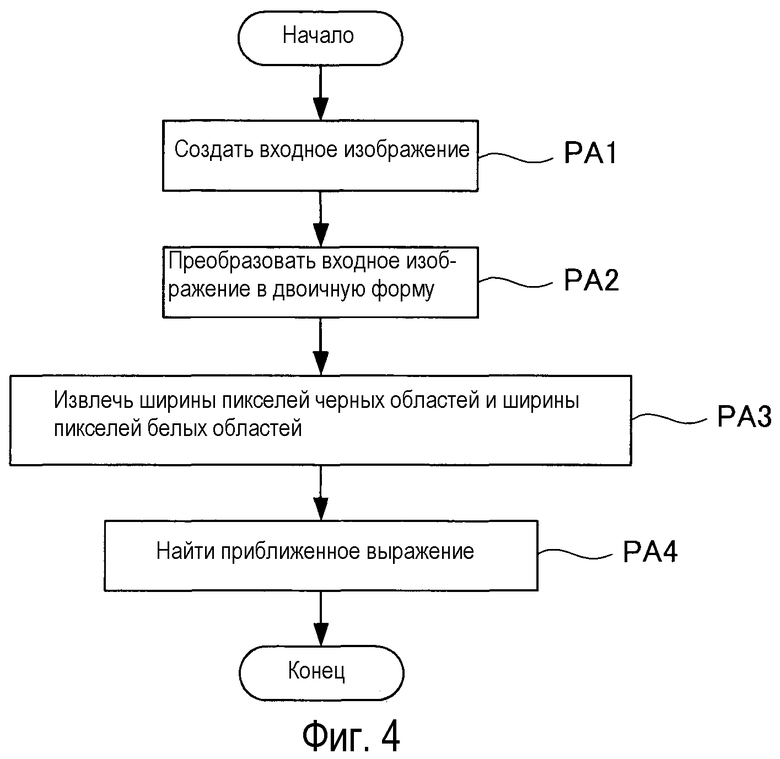
Фиг. 4 - блок-схема алгоритма, показывающая обработку, которая должна выполняться обрабатывающим компьютером в Варианте 1 осуществления настоящего изобретения.
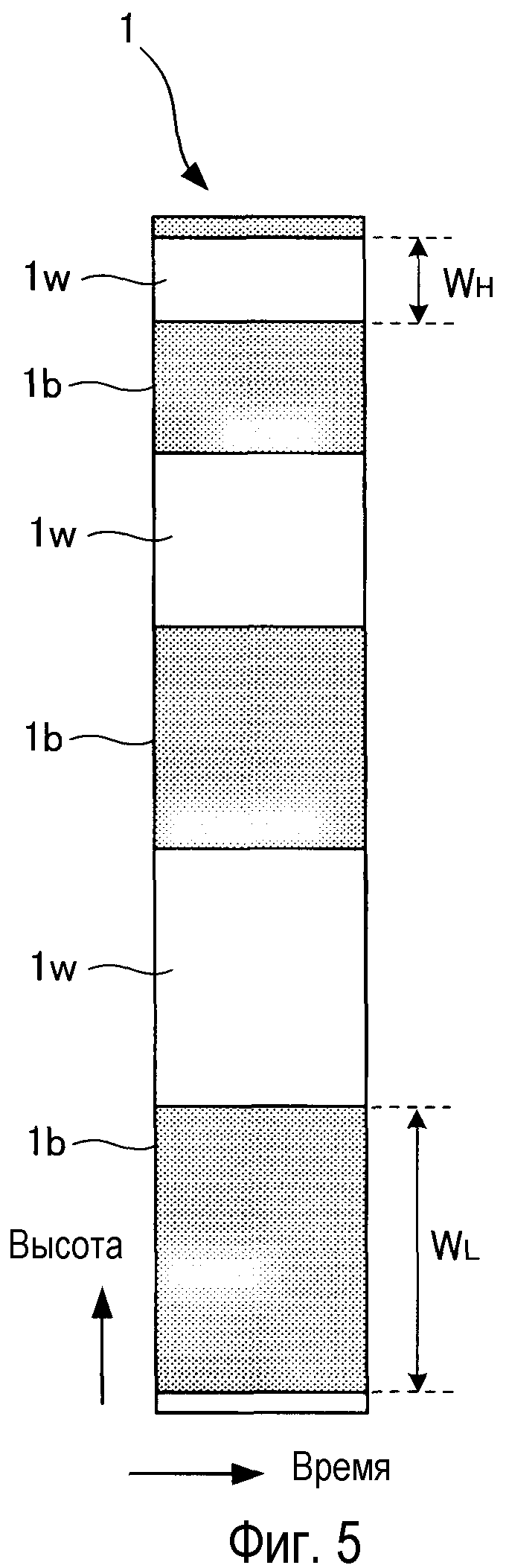
Фиг. 5 - поясняющая схема, показывающая пример калибровочного изображения, полученного в Варианте 1 осуществления настоящего изобретения.
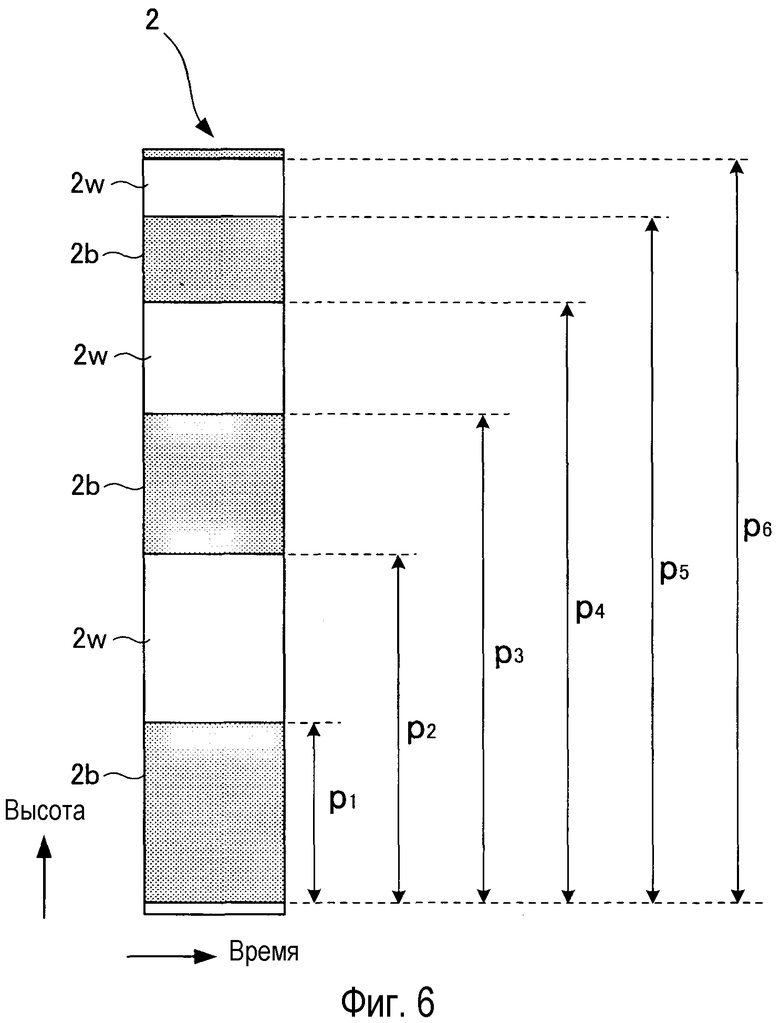
Фиг. 6 - поясняющая схема, показывающая пример двоичного изображения, полученного в Варианте 1 осуществления настоящего изобретения.
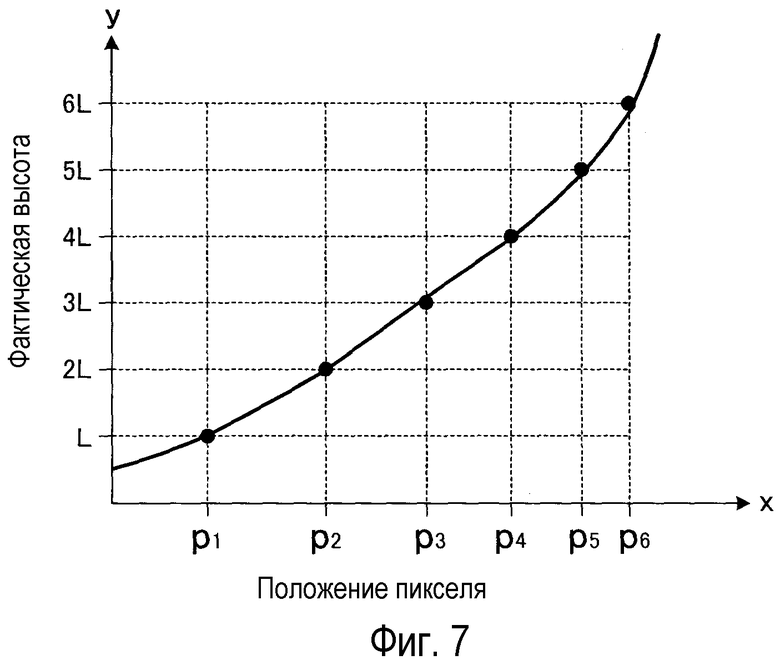
Фиг. 7 - график, показывающий отношение между положением пикселя у контактного провода и фактической высотой, полученное в Варианте 1 осуществления настоящего изобретения.
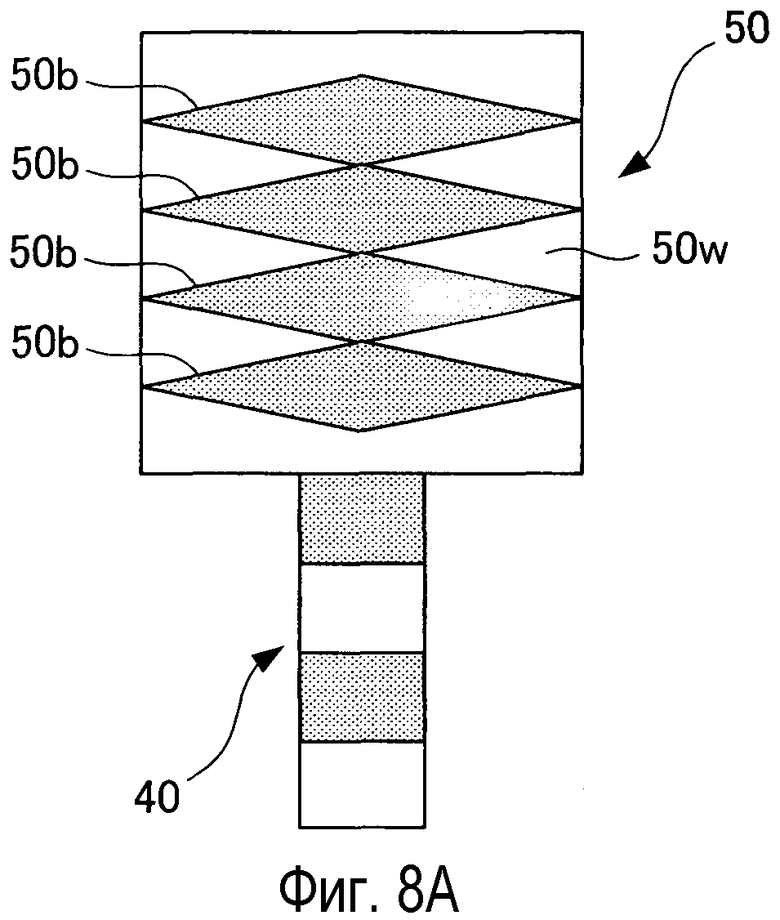
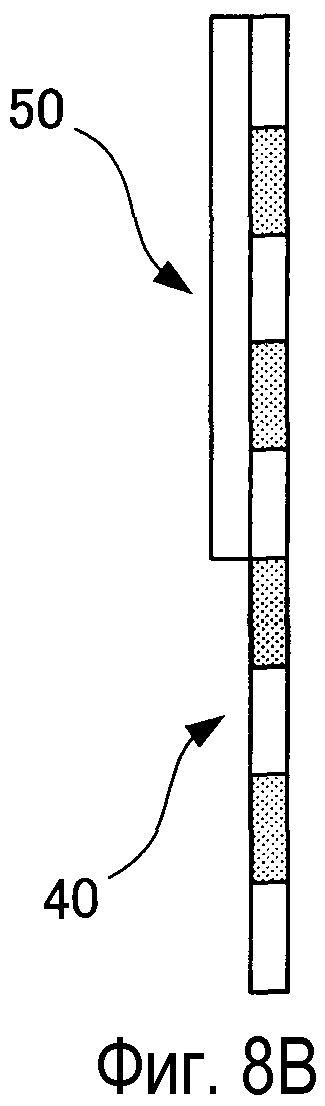
Часть (а) фиг. 8 является видом спереди элемента корректировки строки захвата изображения в Варианте 2 осуществления настоящего изобретения. Часть (b) фиг. 8 является боковой проекцией элемента корректировки строки захвата изображения, показанного в части (а) фиг. 8.
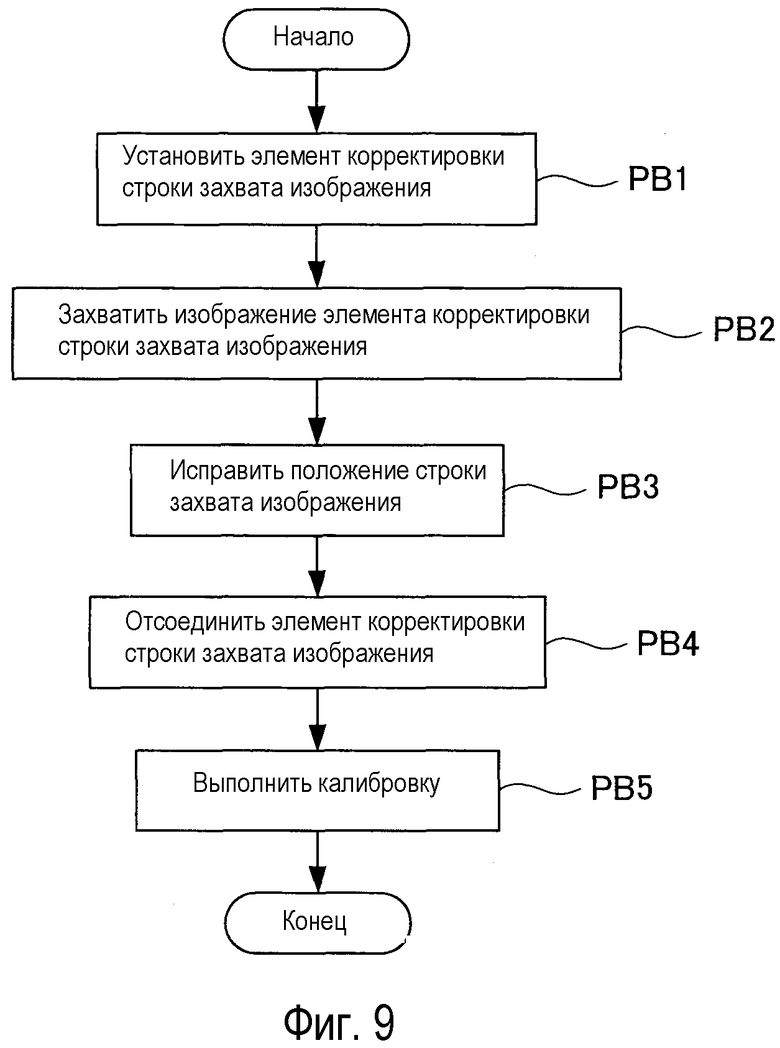
Фиг. 9 - блок-схема алгоритма, показывающая обработку, имеющую отношение к корректировке строки захвата изображения в Варианте 2 осуществления настоящего изобретения.
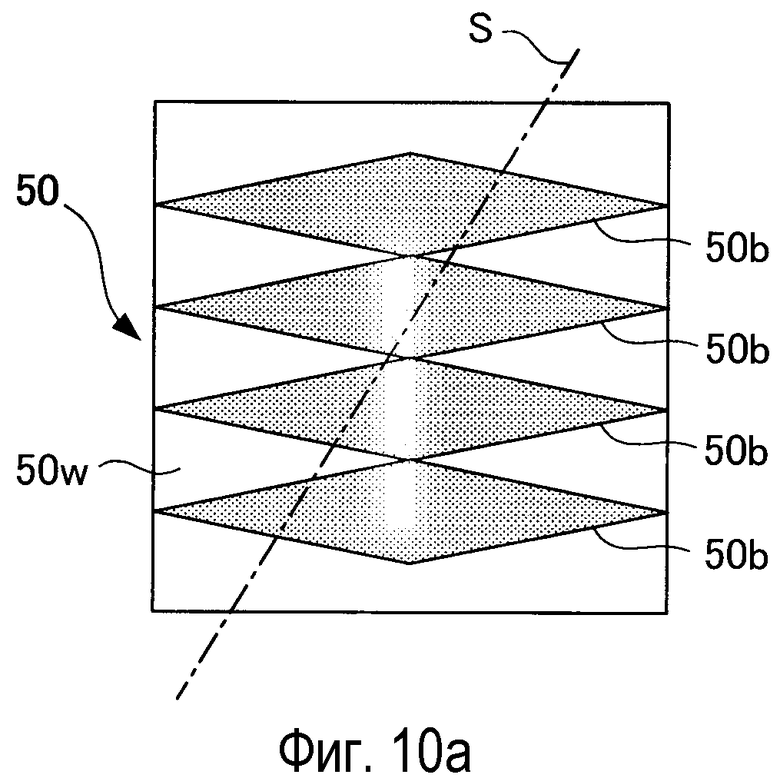
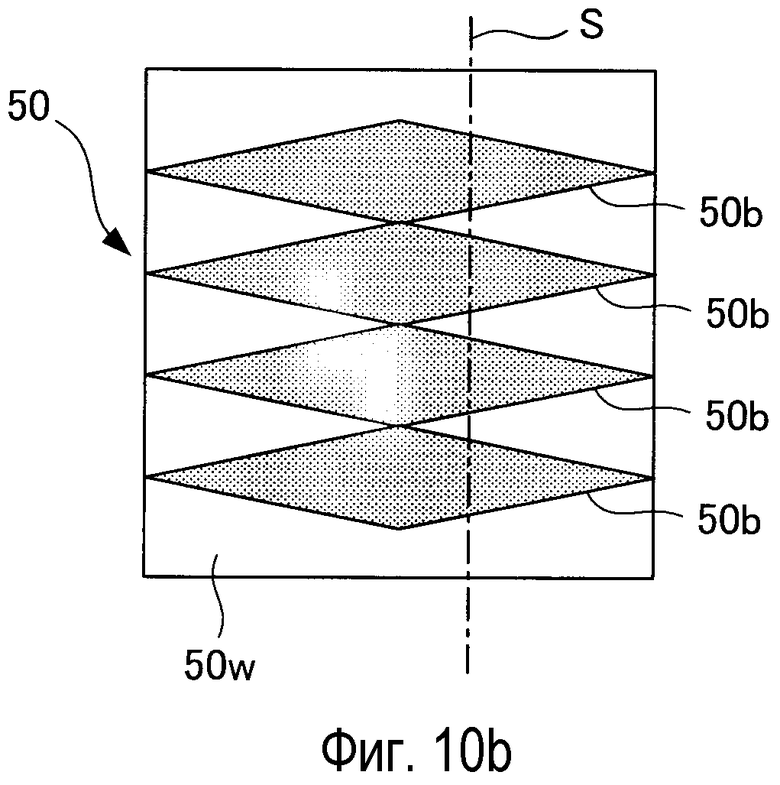
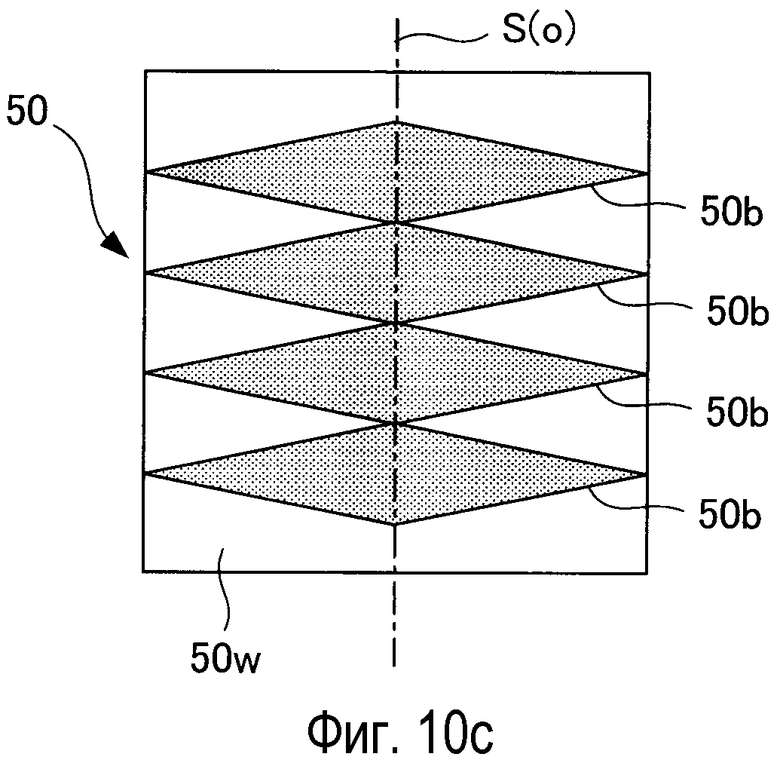
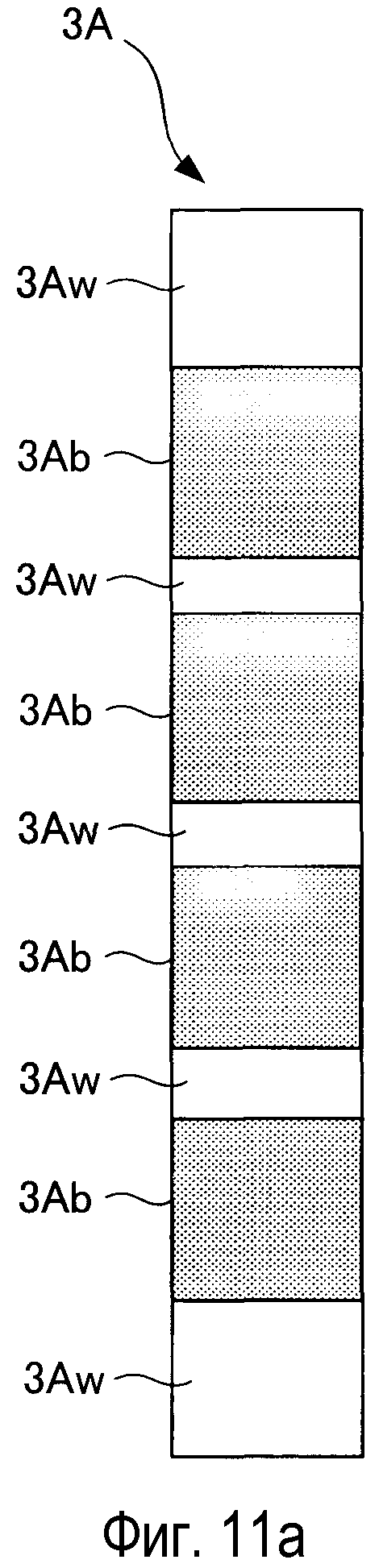
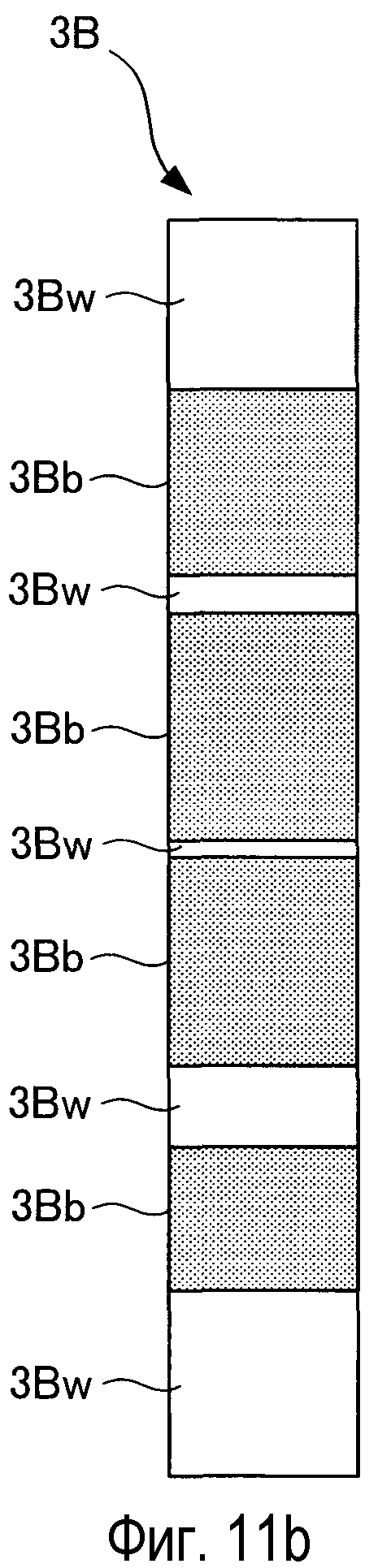
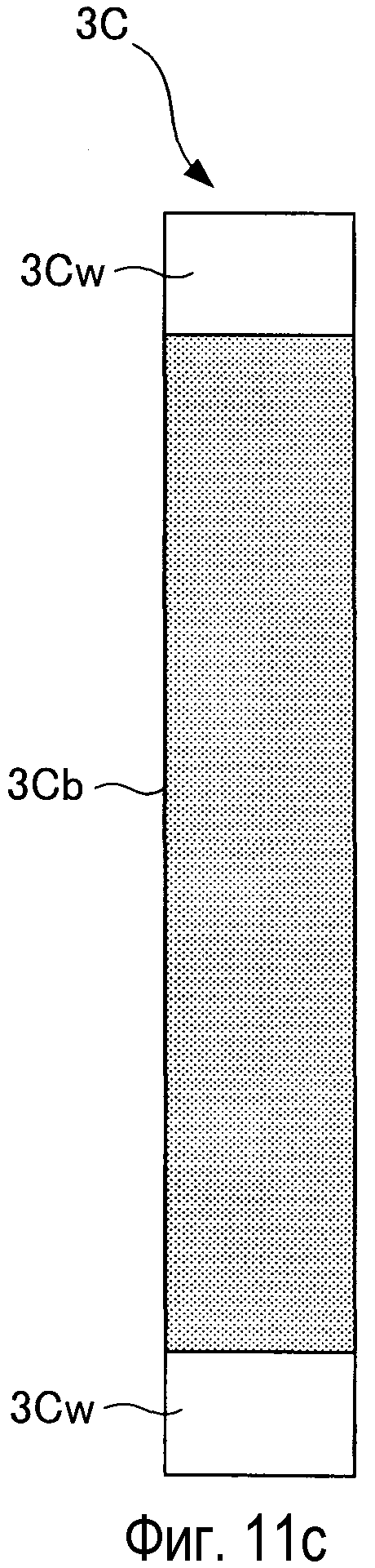
Части (а), (b) и (с) фиг. 10 являются поясняющими схемами, показывающими примерные положения строки захвата изображения на элементе корректировки строки захвата изображения в Варианте 2 осуществления настоящего изобретения.
Части (а), (b) и (с) фиг. 11 являются поясняющими схемами, показывающими примерные калибровочные изображения, полученные из положений строки захвата изображения, показанной в частях (а), (b) и (с) фиг. 10.
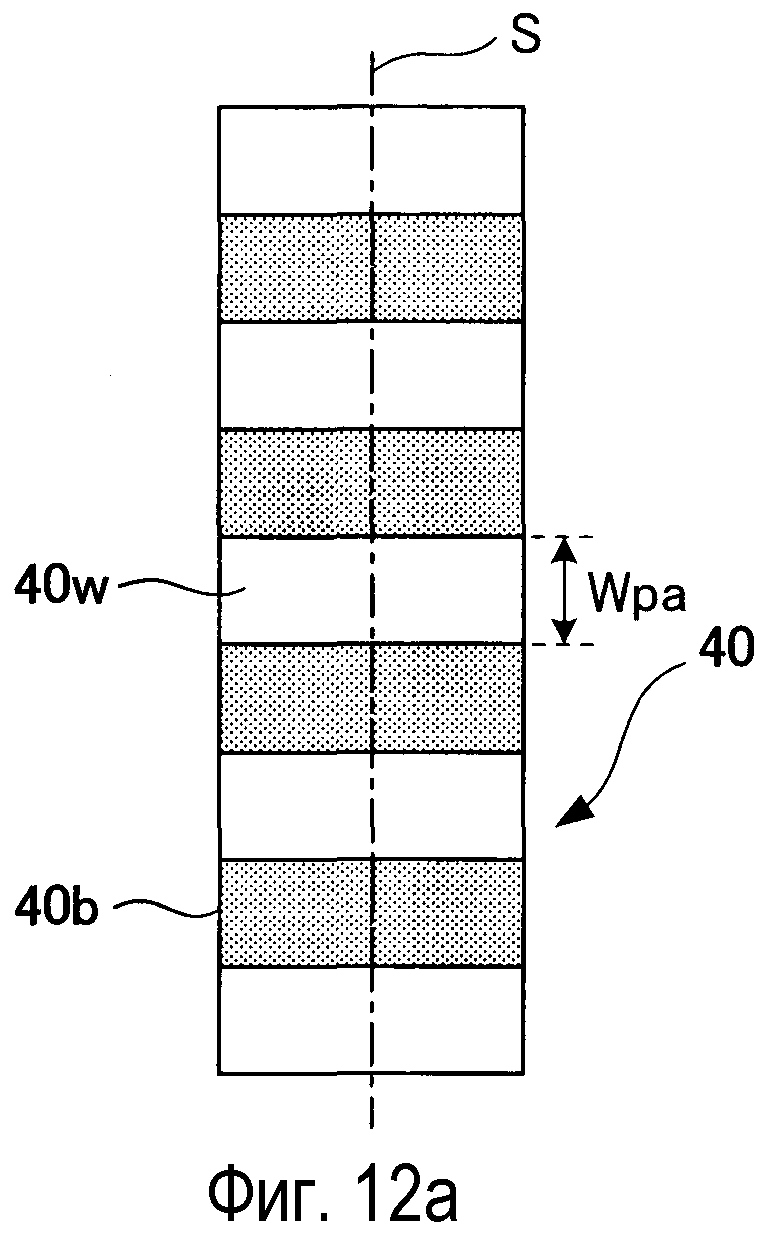
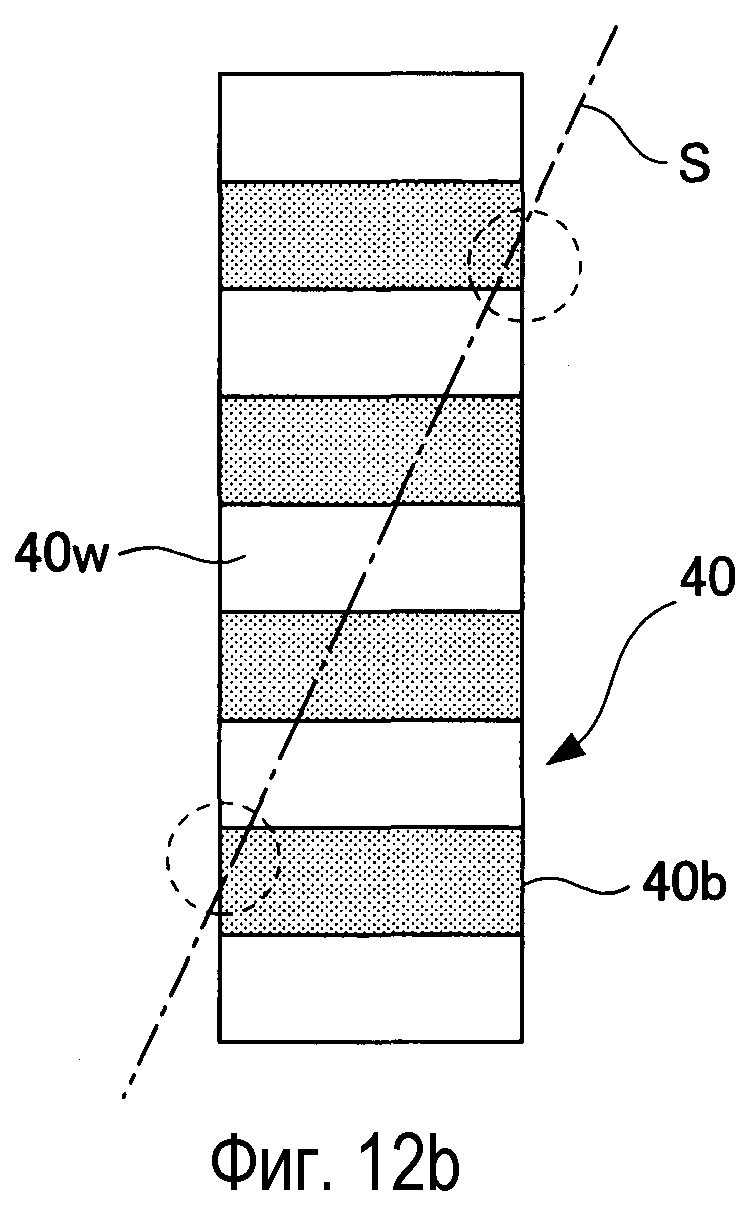
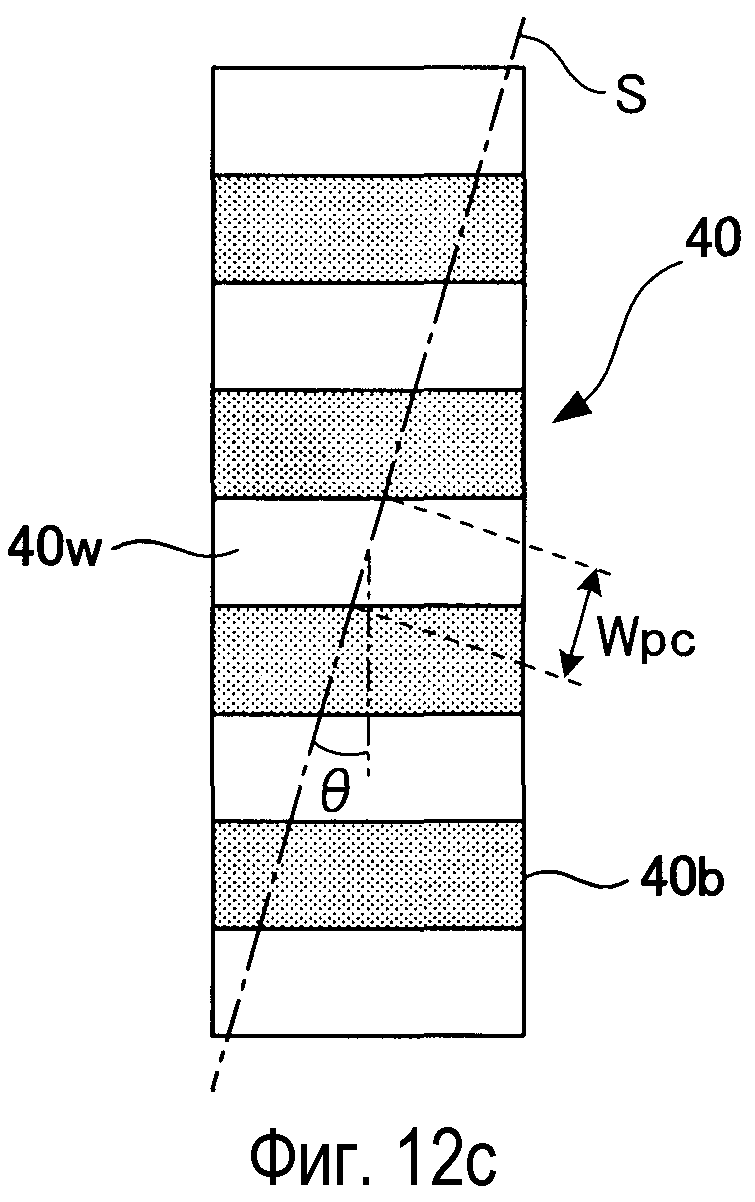
Части (а), (b) и (с) фиг. 12 являются поясняющими схемами, показывающими примерные положения строки захвата изображения на калибровочном элементе в Варианте 1 осуществления настоящего изобретения.
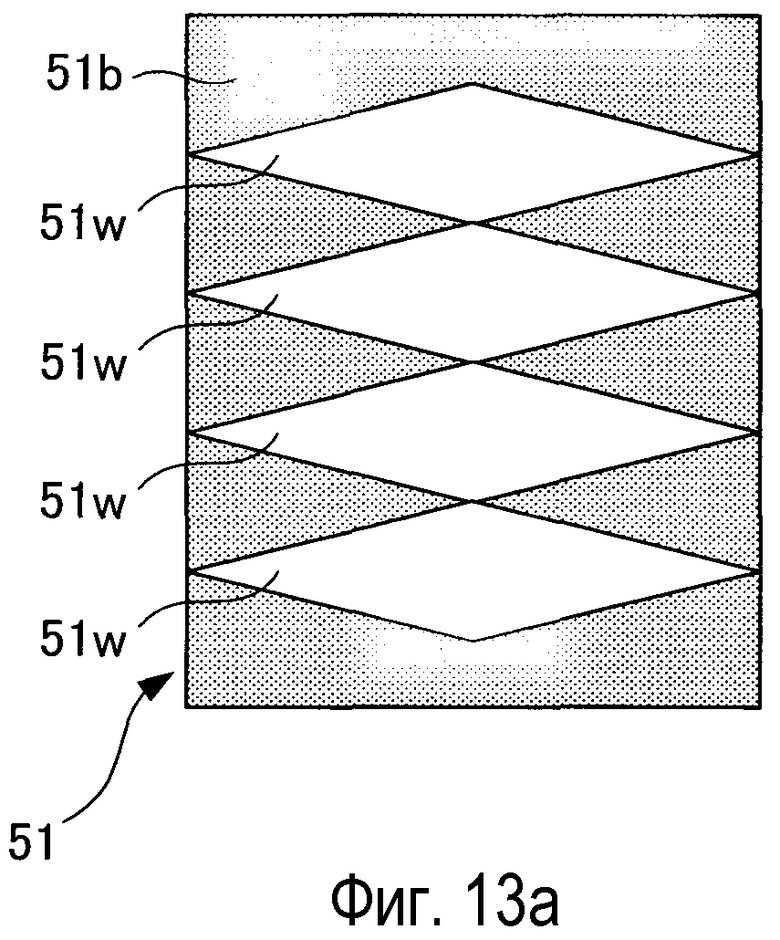
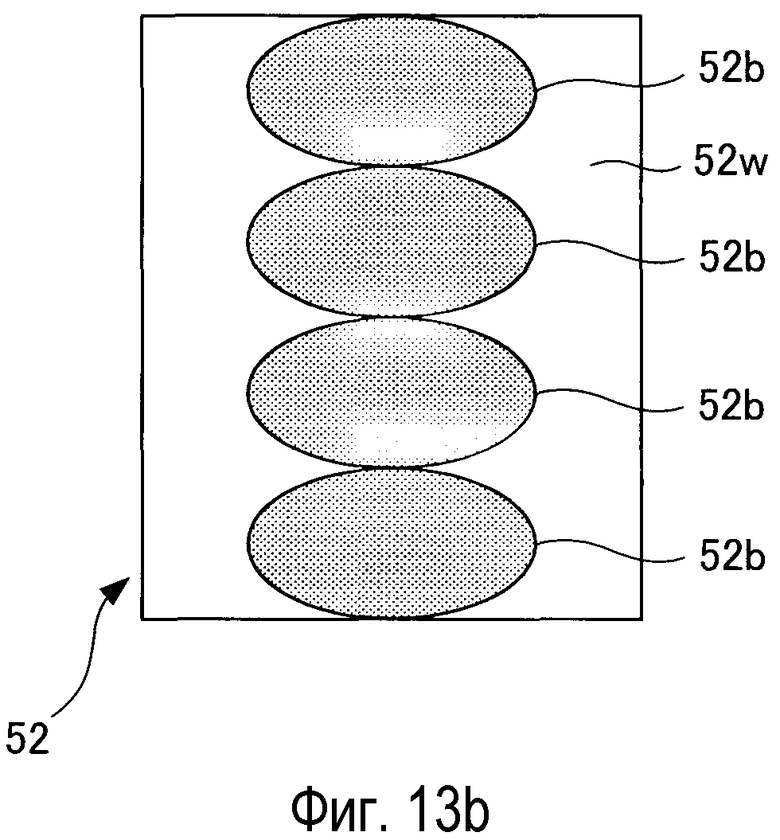
Части (а) и (b) фиг. 13 являются поясняющими схемами, показывающими другие примеры элемента корректировки строки захвата изображения.
Фиг. 14 - поясняющая схема, показывающая примеры размещения линейного датчика.
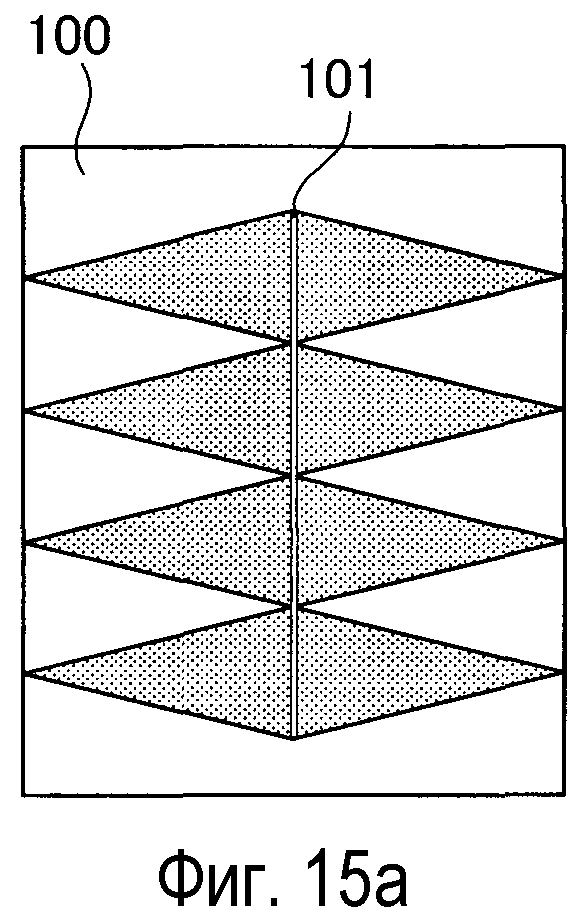
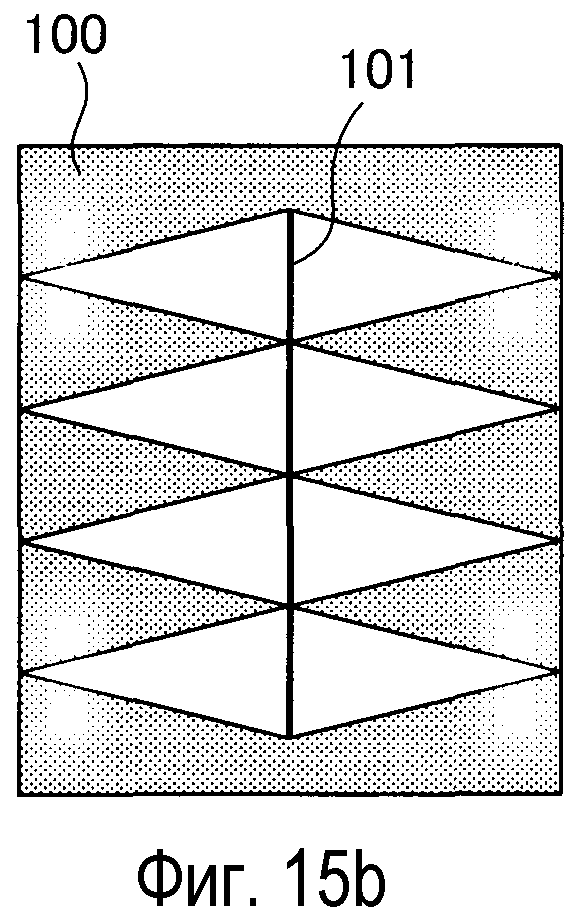
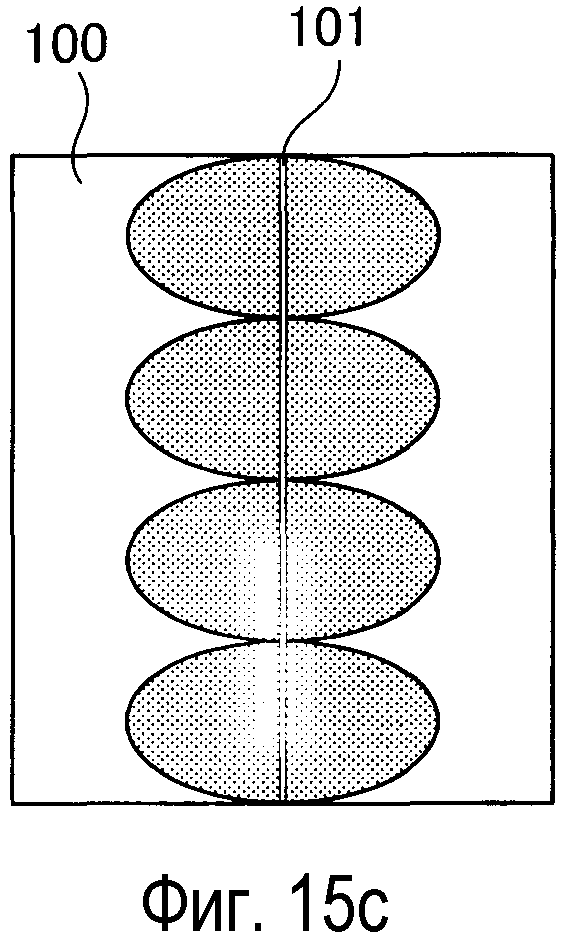
Фиг. 15 - вид спереди элементов корректировки строки захвата изображения в Варианте 3 осуществления настоящего изобретения.
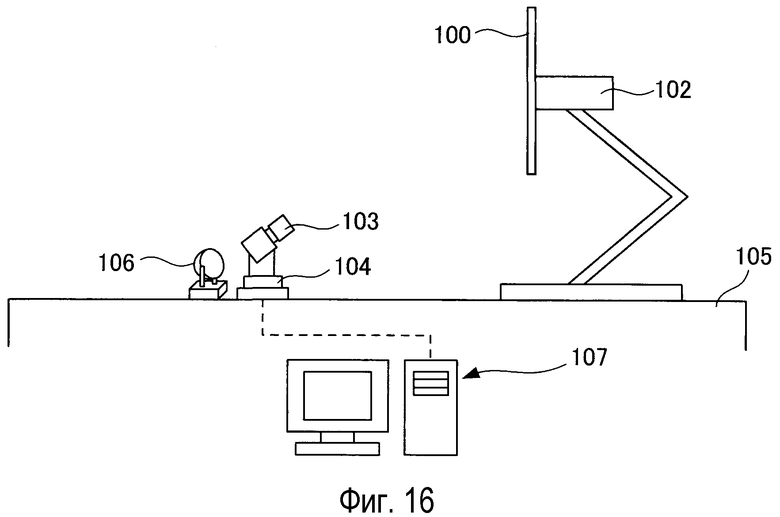
Фиг. 16 - схематическое представление, показывающее конфигурацию устройства, применяемую в способе корректировки, использующем элемент корректировки строки захвата изображения в Варианте 3 осуществления настоящего изобретения.
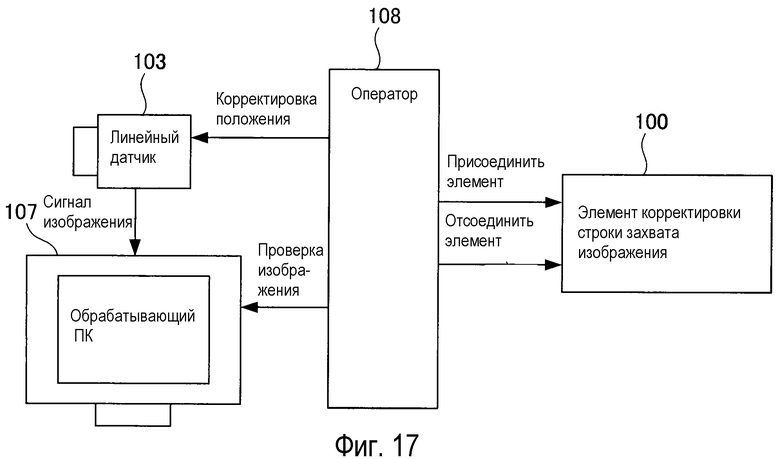
Фиг. 17 - блок-схема, показывающая пример конфигурации, применяемой в способе корректировки, использующем элемент корректировки строки захвата изображения в Варианте 3 осуществления настоящего изобретения.
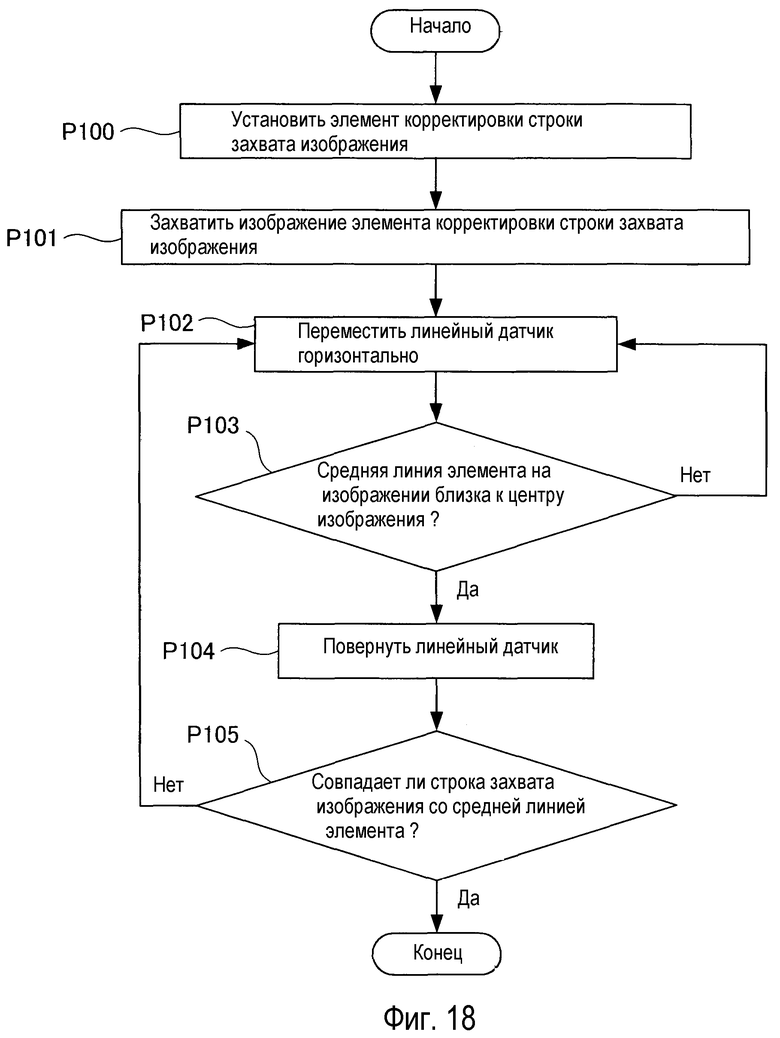
Фиг. 18 - блок-схема алгоритма, показывающая способ корректировки, использующий элемент корректировки строки захвата изображения в Варианте 3 осуществления настоящего изобретения.
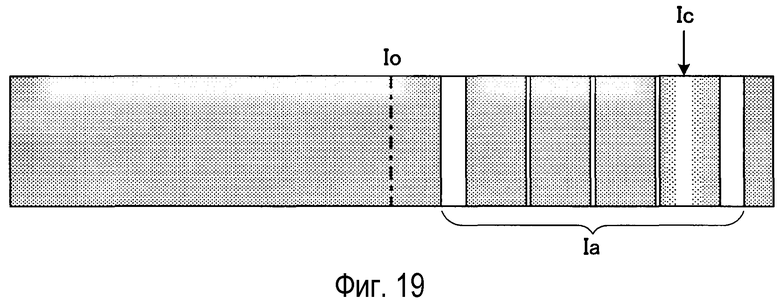
Фиг. 19 - схема, показывающая пример захваченного изображения, которое видно перед тем, как выполняется горизонтальная корректировка в Варианте 3 осуществления настоящего изобретения.
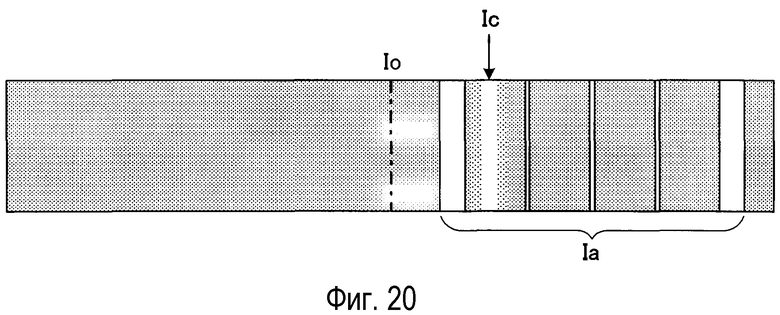
Фиг. 20 - схема, показывающая пример захваченного изображения, которое видно после того, как выполняется горизонтальная корректировка в Варианте 3 осуществления настоящего изобретения.
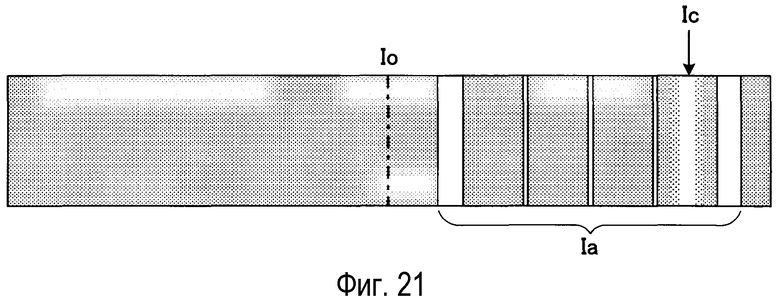
Фиг. 21 - схема, показывающая пример захваченного изображения, которое видно после того, как выполняется вращательная корректировка в Варианте 3 осуществления настоящего изобретения.
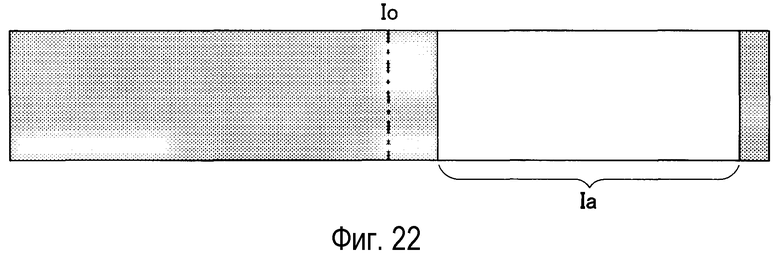
Фиг. 22 - схема, показывающая пример захваченного изображения, которое видно после того, как выполняются корректировки в Варианте 3 осуществления настоящего изобретения.
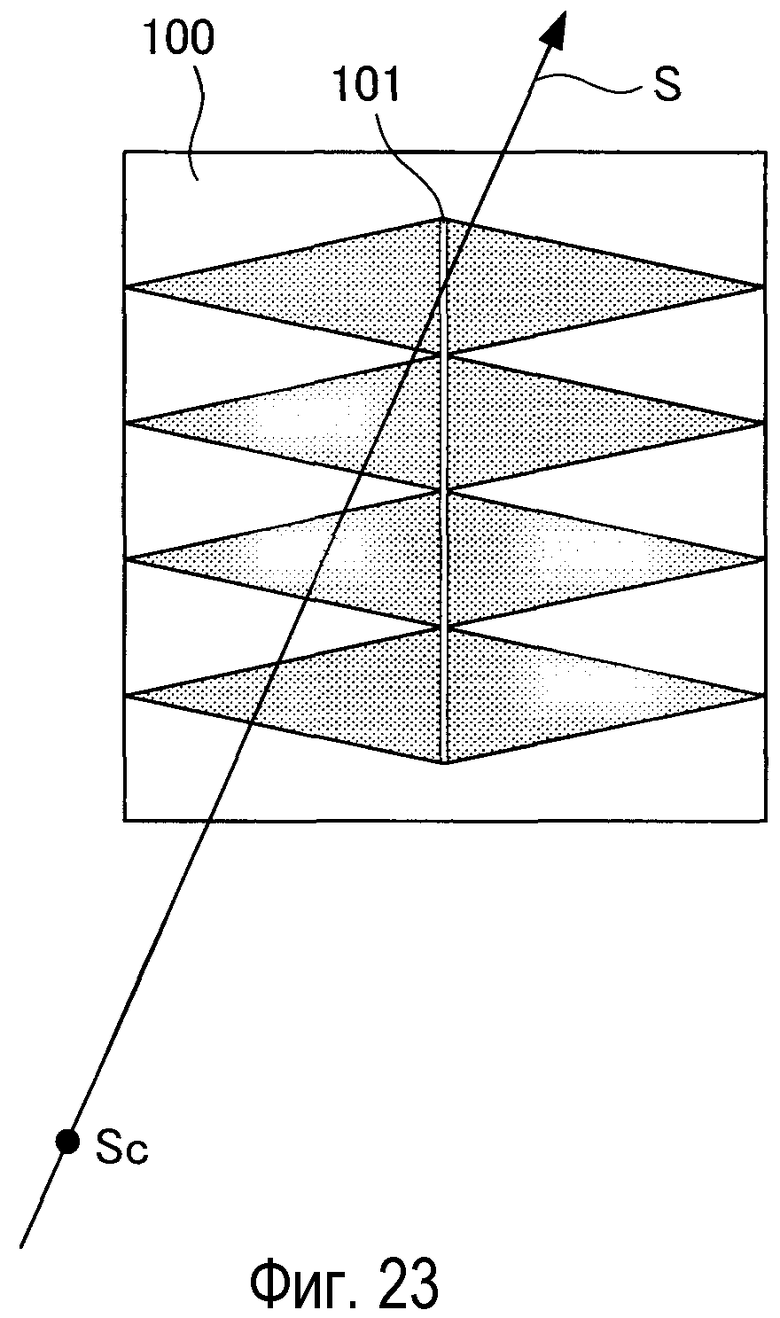
Фиг. 23 - схема, показывающая пример строки захвата изображения, на которой еще не выполнена горизонтальная корректировка в Варианте 3 осуществления настоящего изобретения.
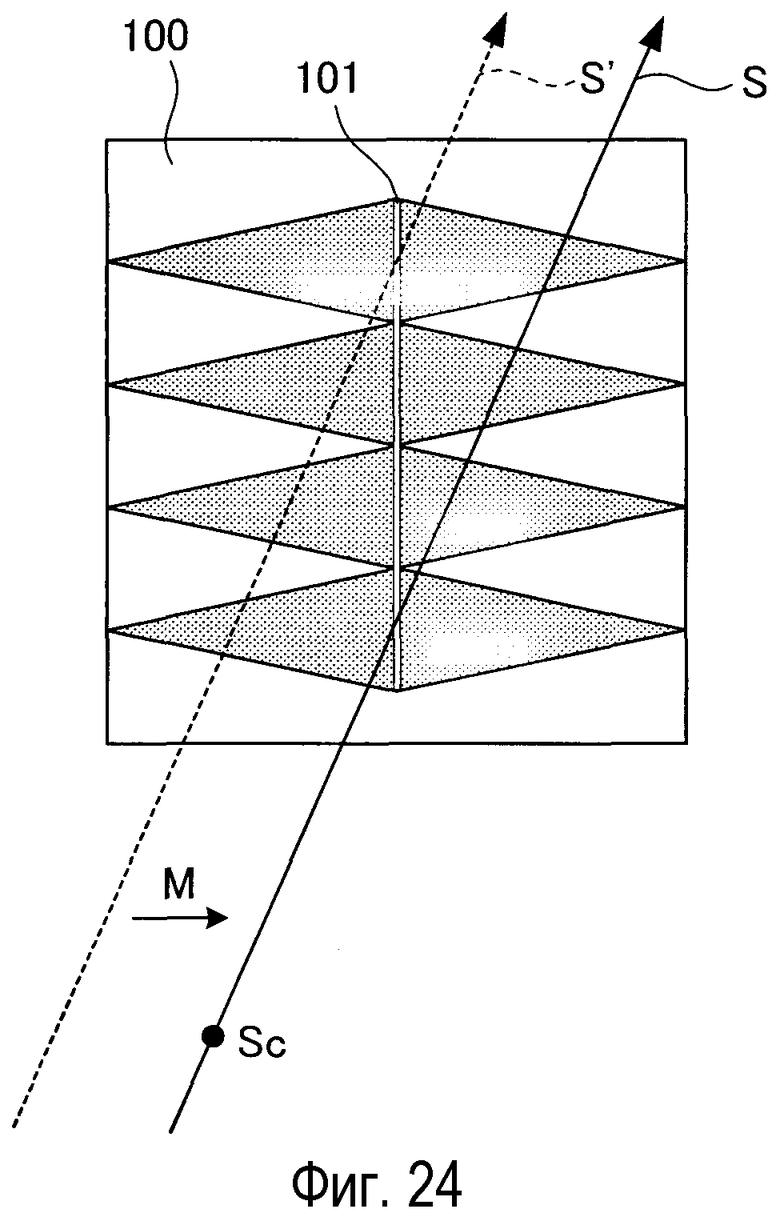
Фиг. 24 - схема, показывающая пример строки захвата изображения, на которой выполнена горизонтальная корректировка в Варианте 3 осуществления настоящего изобретения.
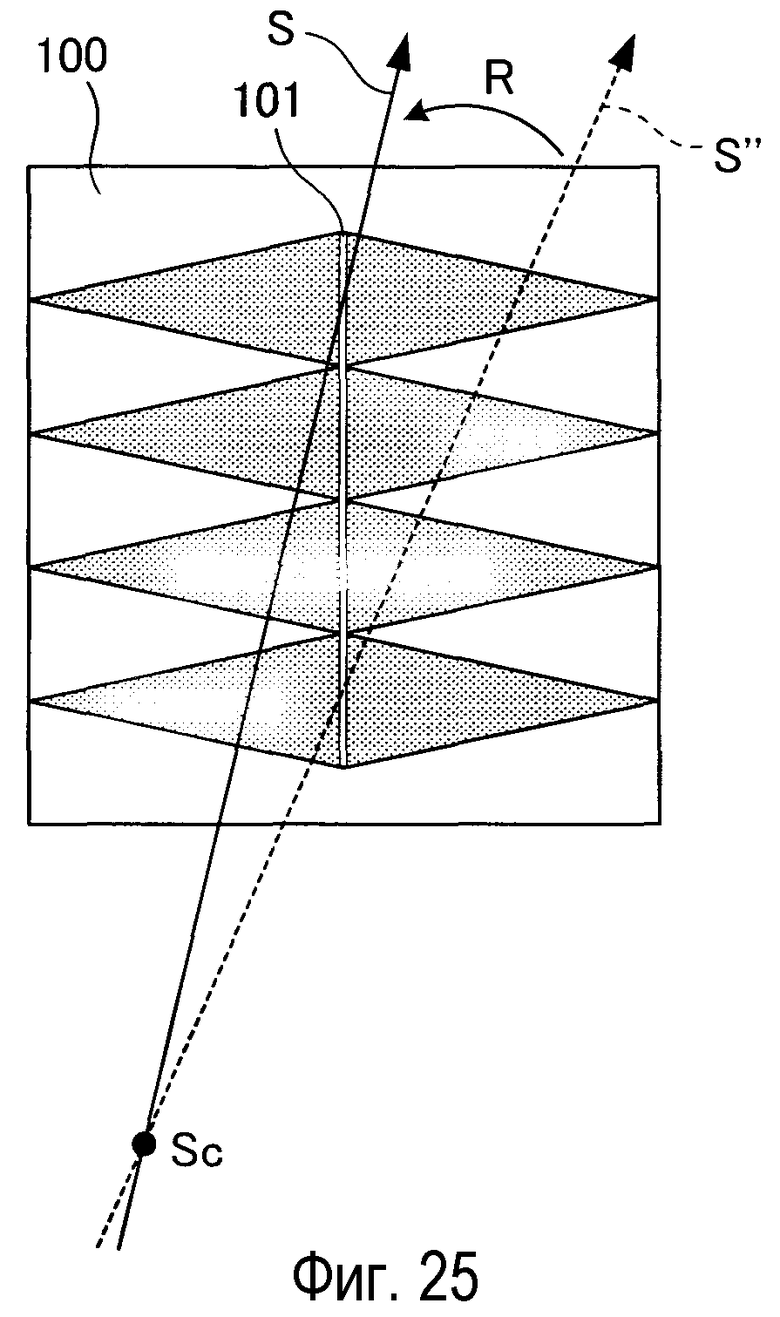
Фиг. 25 - схема, показывающая пример строки захвата изображения, на которой выполнена вращательная корректировка в Варианте 3 осуществления настоящего изобретения.
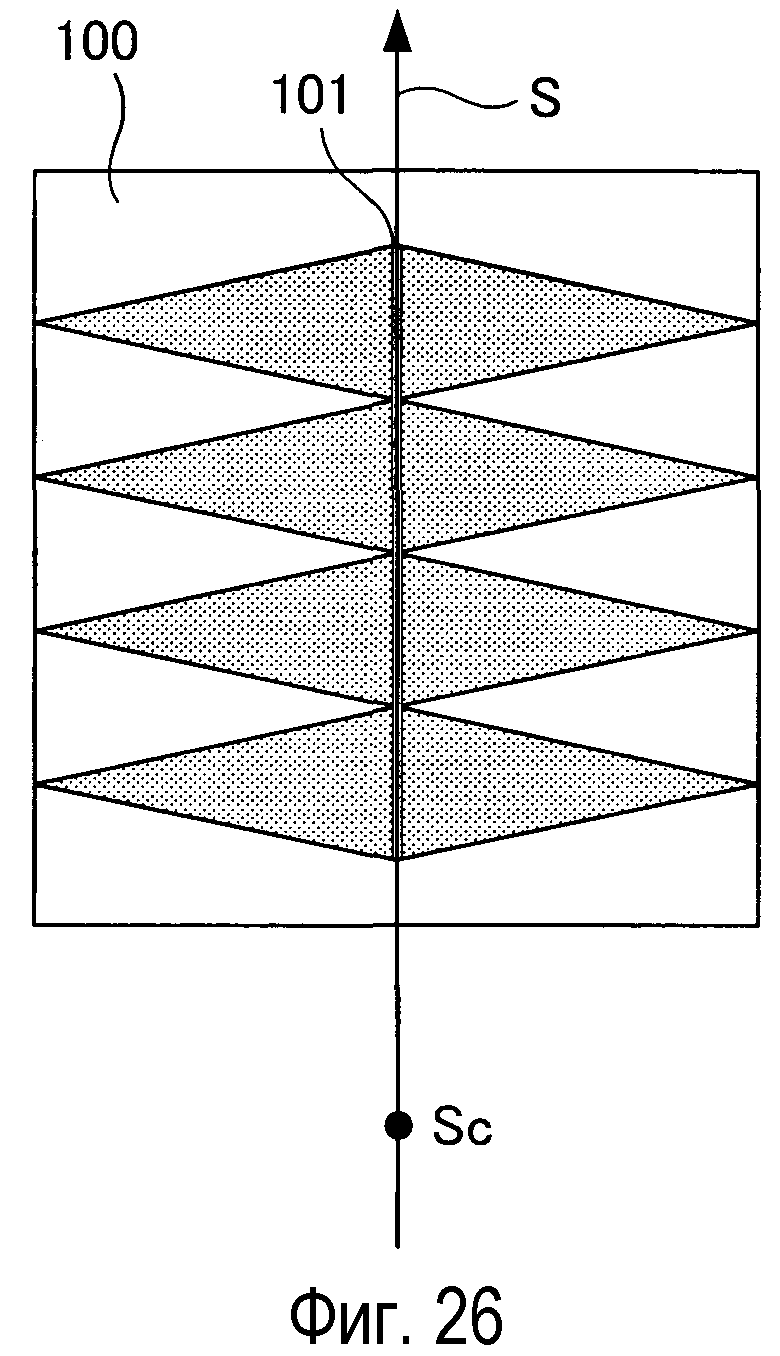
Фиг. 26 - схема, показывающая пример строки захвата изображения, на которой выполнены корректировки в Варианте 3 осуществления настоящего изобретения.
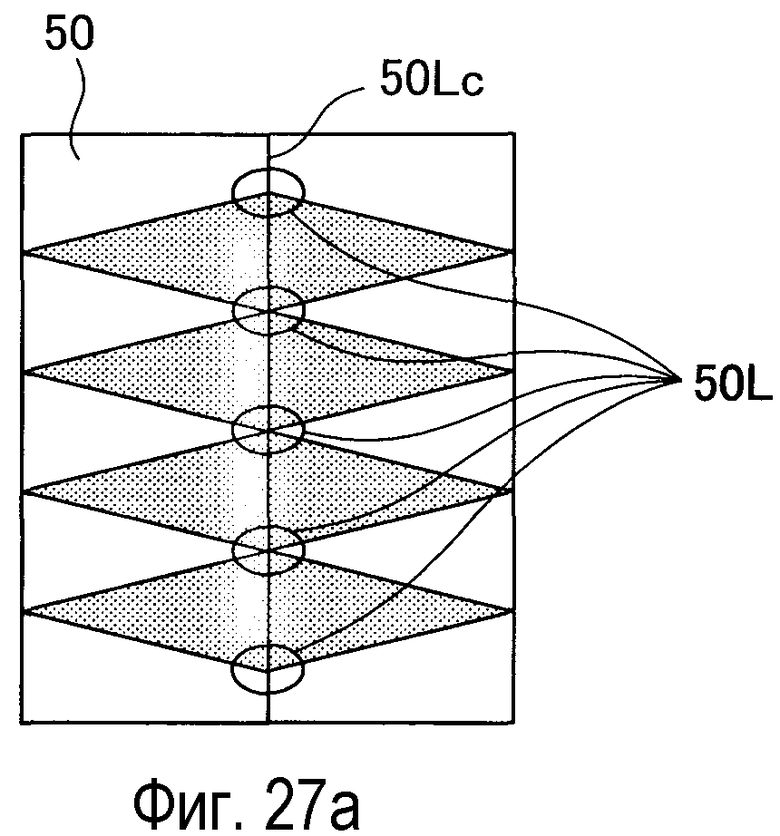
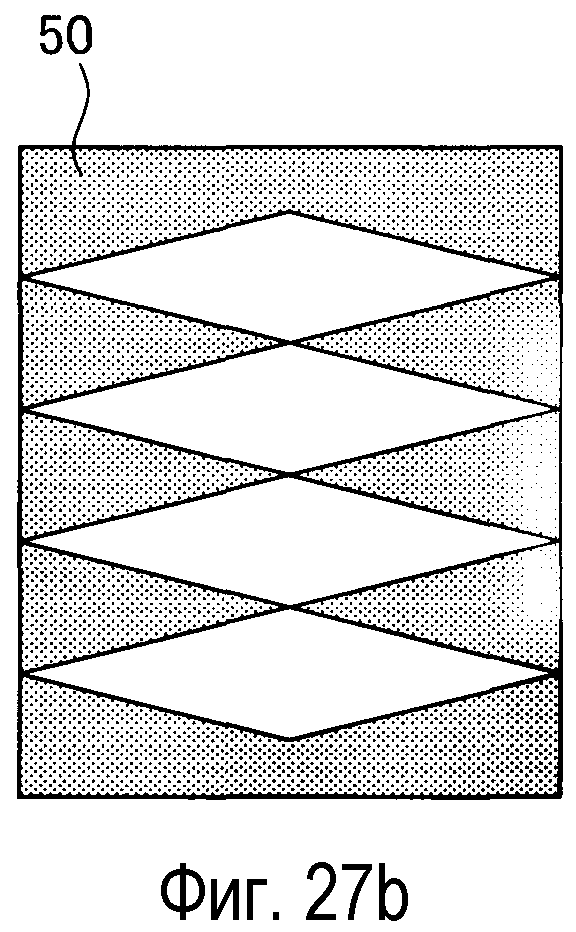
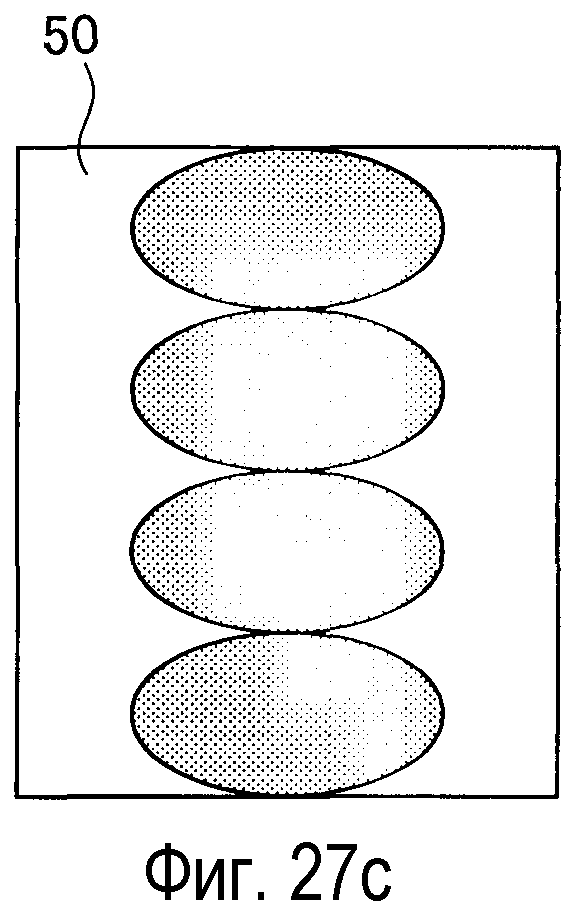
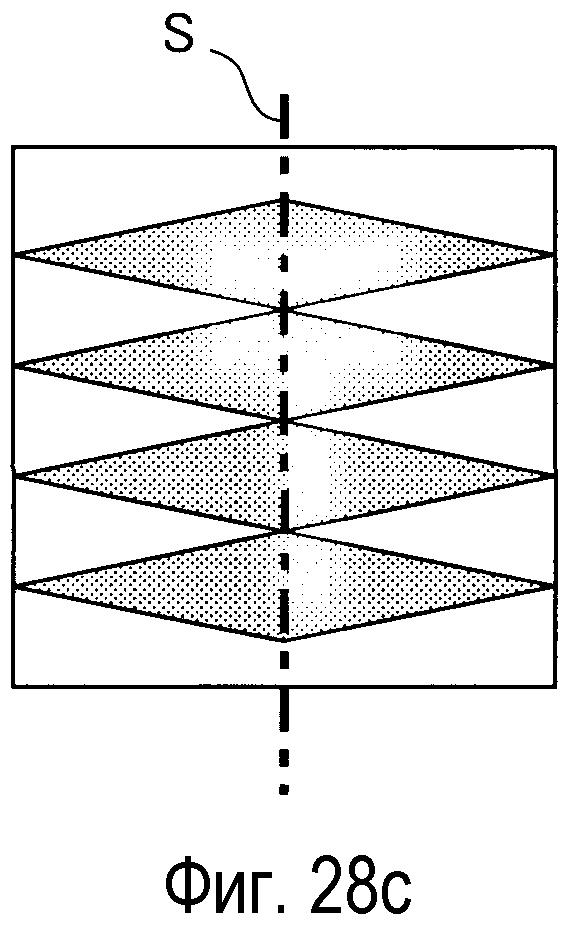
Фиг. 27 - схема, показывающая примеры шаблонов в элементах корректировки строки захвата изображения для линейного датчика в Вариантах 1 и 2 осуществления настоящего изобретения.
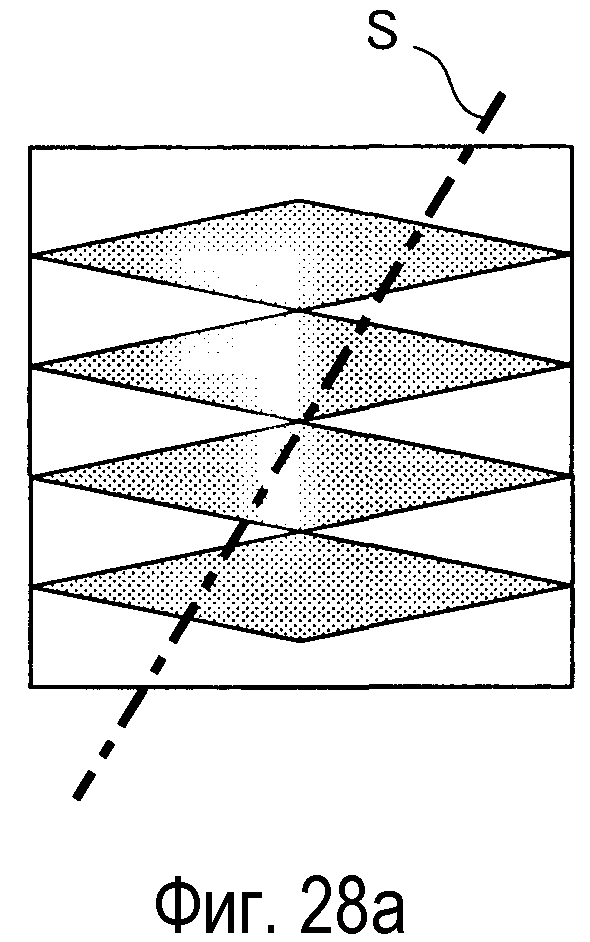
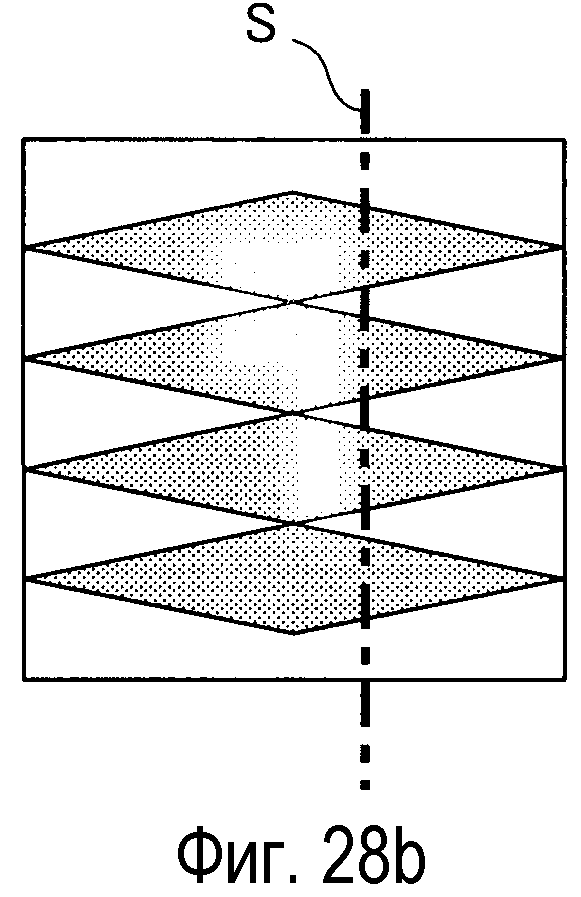
Фиг. 28 - схема, показывающая примеры условий для захвата изображений элементов корректировки строки захвата изображения в Вариантах 1 и 2 осуществления настоящего изобретения.
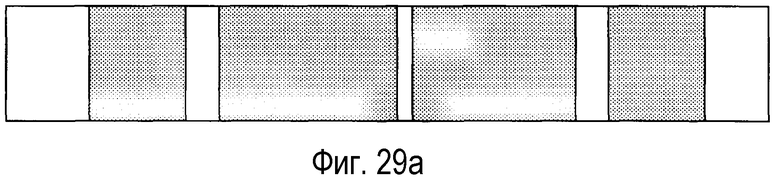
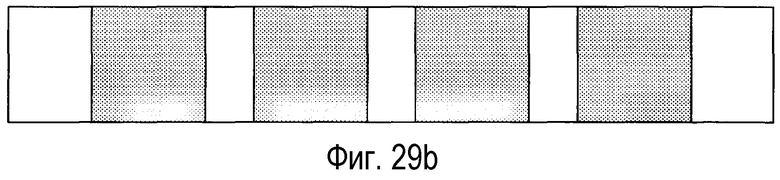
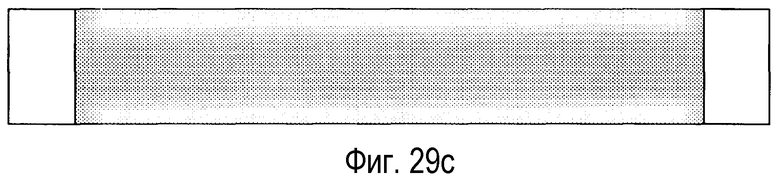
Фиг. 29 - схема, показывающая примеры того, как захватываются изображения элементов корректировки строки захвата изображения в Вариантах 1 и 2 осуществления настоящего изобретения.
Фиг. 30 - схематическое представление, показывающее пример размещения линейного датчика по Патентному документу 2.
ЛУЧШИЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже некоторые примеры устройства измерения высоты пантографа из настоящего изобретения будут описываться подробно, ссылаясь на чертежи.
Вариант 1 осуществления
Первый вариант осуществления устройства измерения высоты пантографа из настоящего изобретения будет описываться с использованием фиг. с 1 по 7. Фиг. 1 - схематическая конфигурационная схема устройства измерения высоты пантографа из этого варианта осуществления. Фиг. 2 - вид спереди калибровочного элемента в этом варианте осуществления. Фиг. 3 - блок-схема, показывающая строение устройства измерения высоты пантографа в этом варианте осуществления. Фиг. 4 - блок-схема алгоритма, показывающая последовательность калибровки, выполняемую устройством измерения высоты пантографа в этом варианте осуществления. Фиг. 5 - поясняющая схема, показывающая пример калибровочного изображения в этом варианте осуществления. Фиг. 6 - поясняющая схема, показывающая пример двоичного изображения. Фиг. 7 - график, показывающий отношение между фактической высотой и положением пикселя в изображении.
Как показано на фиг. 1, устройство измерения высоты пантографа в этом варианте осуществления включает в себя линейный датчик 20, обрабатывающий компьютер 30 и калибровочный элемент 40.
Линейный датчик 20 размещается на крыше вагона 10 таким образом, чтобы захватывать изображения пантографа 10a. В частности, ориентация линейного датчика 20 задается так, чтобы: его оптическая ось могла быть направлена наклонно вверх; и его направление строки сканирования могло быть ортогонально пантографу 10a. Сигналы изображения, полученные этим линейным датчиком 20, вводятся в обрабатывающий компьютер 30.
Обрабатывающий компьютер 30 обладает функцией получения приближенного выражения для вычисления высоты воздушного провода, причем приближенное выражение является выражением, представляющим отношение между положением калибровочного элемента 40 в изображении, захваченном линейным датчиком 20, и фактическим положением калибровочного элемента 40. Как показано на фиг. 3, обрабатывающий компьютер 30 включает в себя блок 31 создания входного изображения, блок 32 бинаризации, блок 33 извлечения ширины пикселя в качестве блока обнаружения положения окрашенной области, арифметический блок 34 приближенного выражения в качестве арифметического блока выражения отношения и запоминающие устройства 35A, 35B. К тому же монитор 60, сконфигурированный для отображения калибровочного изображения 1 (изображение с линейного датчика) и двоичного изображения 2, которые описываются ниже, подключается к обрабатывающему компьютеру 30.
В конфигурации для нахождения приближенного выражения для вычисления высоты воздушного провода блок 31 создания входного изображения создает калибровочное изображение 1 (см. фиг. 5) путем упорядочения в хронологическом порядке сигналов изображения, полученных путем захвата изображений калибровочного элемента 40 и введенных от линейного датчика 20. Это калибровочное изображение 1 отправляется в блок 32 бинаризации через запоминающие устройства 35А, 35B.
Блок 32 бинаризации создает двоичное изображение 2 (см. фиг. 6) путем преобразования в двоичную форму калибровочного изображения 1, введенного из блока 31 создания входного изображения. Двоичное изображение 2, созданное этим блоком 32 бинаризации, отправляется в блок 33 извлечения ширины пикселя через запоминающее устройство 35B.
Блок 33 извлечения ширины пикселя извлекает след 2b каждой черной области 40b и след 2w каждой белой области 40w калибровочного элемента 0, который будет описываться позже, из двоичного изображения 2, введенного из блока 32 бинаризации, и соответственно получает ширину каждой из областей 2b, 2w в виде ширины пикселя. Информация о ширинах пикселей, извлеченных блоком 33 извлечения ширины пикселя, отправляется в арифметический блок 34 приближенного выражения через запоминающее устройство 35B.
Арифметический блок 34 приближенного выражения получает приближенное выражение для вычисления высоты воздушного провода по методу наименьших квадратов на основе ширин пикселей, введенных из блока 33 извлечения ширины пикселя, и фактических ширин черных областей 40b и белых областей 40w, которые измеряются заранее. Приближенное выражение для вычисления высоты воздушного провода, которое найдено арифметическим блоком 34 приближенного выражения, сохраняется в запоминающем устройстве 35B.
В этой связи метод наименьших квадратов является методом, в котором, когда определенная функция, например линейная функция или логарифмическая кривая, которую можно предположить из подходящей модели, предназначена для приближения набора численных значений, полученных путем измерения, коэффициент, который минимизирует сумму остаточных квадратов, определяется с тем, чтобы исходная функция могла лучше всего приближаться к измеренным значениям.
С помощью вышеприведенной конфигурации обрабатывающий компьютер 30 допускает: анализ сигналов изображения, введенных от линейного датчика 20; и нахождение приближенного выражения для вычисления высоты воздушного провода.
Калибровочный элемент 40 сделан из листообразного элемента, образованного в виде, например, прямоугольника. Этот калибровочный элемент 40 образован таким образом, что его продольная длина больше диапазона перемещения пантографа, то есть диапазона колебания воздушного провода. Кроме того, этот калибровочный элемент 40 разъемно закреплен в некотором положении в окрестности одной из торцовых поверхностей пантографа 10a, которая является ближайшей к линейному датчику 20. В частности, калибровочный элемент 40 разъемно закреплен в таком положении, в котором не должно быть ошибки в высотах калибровочного элемента 40 и пантографа 10a, полученных с помощью обрабатывающего компьютера 30. Дополнительно калибровочный элемент 40 размещается на высоте, включающей диапазон колебания воздушного провода.
Как показано на фиг. 2, черные области 40b и белые области 40w размещаются поочередно на поверхности калибровочного элемента 40 в его продольном направлении. В этом варианте осуществления черные области 40b и белые области 40w имеют одинаковую ширину (L) и границы между черными областями 40b и белыми областями 40w перпендикулярны продольному направлению калибровочного элемента 40.
На основе фиг. 4 будет приведено описание обработки для нахождения приближенного выражения для вычисления высоты воздушного провода с использованием устройства измерения высоты пантографа в этом варианте осуществления.
Калибровочный элемент 40 размещается в окрестности пантографа 10a, и линейный датчик 20 побуждают начать захват изображений калибровочного элемента 40. При выполнении этого, как показано на фиг. 4, обрабатывающий компьютер 30 упорядочивает в хронологическом порядке изображения калибровочного элемента 40, введенные от линейного датчика 20, и соответственно создает калибровочное изображение 1, которое показано на фиг. 5 (этап PA1). Как показано на фиг. 5, в калибровочном изображении 1 отображаются следы 1b черных областей 40b и следы 1w белых областей.
В этой связи, так как оптическая ось линейного датчика 20 направлена наклонно вверх, самая верхняя область калибровочного элемента 40, которая удлиняет расстояние от линейного датчика 20 до калибровочного элемента 40, отображается в калибровочном изображении 1 с шириной WH меньше ширины WL, с которой отображается область калибровочного элемента 40, которая укорачивает расстояние от линейного датчика 20 до калибровочного элемента 40.
После этапа РА1 калибровочное изображение 1 преобразуется в двоичную форму и создается двоичное изображение 2, которое показано на фиг. 6 (этап РА2). Как показано на фиг. 6, двоичное изображение 2 является изображением, которое почти такое же, как калибровочное изображение 1.
После этапа РА2 следы 2b и 2w, соответствующие черным и белым областям 40b и 40w соответственно, извлекаются из двоичного изображения 2, а затем получаются их ширины (в этом варианте осуществления расстояния с p1 по p6 от одной до других границ между соседними следами 2b и 2w, как показано на фиг. 6) (этап РА3).
После этого, как показано на фиг. 7, получается отношение между ширинами p1 - p6, полученными на этапе РА3, и фактическими положениями черных и белых областей 40b, 40w в калибровочном элементе 40 (в этом варианте осуществления расстояния с L по 6L от одной до других границ между соседними черными и белыми областями 40b, 40w). На основе этого отношения и изображения, захваченного линейным датчиком 20, приближенное выражение для вычисления высоты воздушного провода в качестве выражения отношения для вычисления высоты пантографа 10a, то есть высоты воздушного провода, получается по методу наименьших квадратов (этап РА4). Приближенное выражение для вычисления высоты воздушного провода можно получить посредством вышеупомянутой обработки.
Следует отметить, что в случае измерения высоты пантографа 10a с использованием приближенного выражения для вычисления высоты воздушного провода прежде всего получается положение пикселя пантографа 10a в захваченном изображении путем обработки изображений, например сопоставления с образцом, как и в случае, раскрытом в Патентном документе 2. Затем полученное положение пикселя заменяется соответствующей переменной в приближенном выражении, полученном на этапе РА4. В силу этого высоту пантографа 10a можно точно получить, даже когда оптическая ось линейного датчика 20 направлена наклонно. Отметим, что получение фактической высоты воздушного провода требует добавления высоты от земли до калибровочного элемента 40 в качестве смещения.
Сконфигурированное соответственно устройство измерения высоты пантографа в этом варианте осуществления позволяет любому оператору выполнить калибровку, потому что устройство допускает получение приближенного выражения для вычисления высоты провода путем анализа захваченных изображений калибровочного элемента 40, независимо от фокусного расстояния у объектива фотокамеры в линейном датчике, расстояния от линейного датчика до пантографа, разрешения изображения и т.п.
Соответственно, даже когда изображения захватываются при оптической оси линейного датчика 20, направленной наклонно вверх, высоту пантографа 10a можно очень точно измерить без выполнения каких-либо сложных вычислений, для которых учитываются расстояние от линейного датчика 20 до пантографа 10a, угол возвышения фотокамеры и т.п.
Вариант 2 осуществления
Второй вариант осуществления устройства измерения высоты пантографа из настоящего изобретения будет описываться с использованием фиг. с 8 по 13. Часть (а) фиг. 8 является видом спереди элемента корректировки строки захвата изображения, используемого в этом варианте осуществления. Часть (b) фиг. 8 является боковой проекцией элемента корректировки строки захвата изображения, показанного в части (а) фиг. 8. Фиг. 9 - блок-схема алгоритма, показывающая последовательность обработки для исправления положения линейного датчика в этом варианте осуществления. Части (а), (b) и (с) фиг. 10 являются поясняющими схемами, показывающими примерные положения строки захвата изображения на элементе корректировки строки захвата изображения. Части (а), (b) и (с) фиг. 11 являются поясняющими схемами, показывающими примерные калибровочные изображения, соответствующие фиг. 11. Фиг. 12 - поясняющая схема, показывающая примерные положения строки захвата изображения на калибровочном элементе в Варианте 1 осуществления настоящего изобретения. Части (а) и (b) фиг. 13 являются видами спереди, показывающими другие примеры элемента корректировки строки захвата изображения.
Этот вариант осуществления является примером, где элемент 50 корректировки строки захвата изображения, показанный на фиг. 8, используется для корректировки строки захвата изображения в линейном датчике перед тем, как выполняется действие по калибровке, описанное в Варианте 1 осуществления. Поскольку остальная конфигурация почти такая же, как в Варианте 1 осуществления, одинаковые элементы обозначаются одинаковыми номерами ссылок и их идентичное описание будет пропущено. Описание будет приведено преимущественно о том, что отличает второй вариант осуществления от первого варианта осуществления.
В Варианте 1 осуществления, как показано в части (а) фиг. 12, строка S захвата изображения в линейном датчике 20 устанавливается перпендикулярной пантографу 10a, то есть таким образом, который дает возможность захвата изображений калибровочного элемента 40 в продольном направлении. При размещенном таким образом линейном датчике 20 можно выполнить наиболее идеальную и более точную калибровку.
В отличие от этого в случае, где линейный датчик 20 размещается со строкой S захвата изображения, пересекающей оба края по ширине калибровочного элемента 40, как показано в части (b) фиг. 12, существует вероятность, что нельзя получить точного приближенного выражения для вычисления высоты воздушного провода, потому что следы, соответствующие частям калибровочного элемента 40, указанные окружностями из пунктирных линий в части (b) фиг. 12, появляются в калибровочном изображении 1 с ширинами пикселей меньше, чем в противном случае.
Даже в случае, где строка S захвата изображения не пересекает края по ширине калибровочного элемента 40, как показано в части (с) фиг. 12, если строка S захвата изображения наклонена под углом θ к продольному направлению калибровочного элемента 40, то ширина Wpc каждой белой области 40w на строке S захвата изображения, показанной в части (с) фиг. 12, в (1/cosθ) раз больше ширины Wpa каждой белой области 40w на строке S захвата изображения, показанной в части (а) фиг. 12. Отсюда разрешение, соответствующее строке S захвата изображения, показанной в части (с) фиг. 12, сделано равным (L/P)cosθ, что в cosθ больше разрешения L/P, соответствующего строке S захвата изображения, показанной в части (а) фиг. 12.
В этой связи, когда угол θ изменяется, например, на 1 или 2 градуса, значение cosθ по-прежнему приблизительно равно 1, и поэтому можно обеспечить достаточную точность. Однако, поскольку у линейного датчика 20 элементы считывания изображения расположены на одной линии и он захватывает одномерные изображения, то из показанного на мониторе 60 изображения сложно вычислить, изображение какой части калибровочного элемента 40 захватил линейный датчик 20, а также насколько наклоняется линейный датчик 20 относительно продольного направления калибровочного элемента 40. По этой причине может потребоваться сложное действие, чтобы сделать строку S захвата изображения у линейного датчика 20 параллельной продольному направлению калибровочного элемента 40.
Чтобы найти выход из этого, данный вариант осуществления конфигурируется для использования вышеупомянутого элемента 50 корректировки строки захвата изображения, показанного на фиг. 8, чтобы исправить наклон строки захвата изображения у линейного датчика 20.
В частности, как показано на фиг. 8, в этом варианте осуществления элемент 50 корректировки строки захвата изображения разъемно прикреплен к боковой поверхности калибровочного элемента 40, обращенной к линейному датчику 20. Элемент 50 корректировки строки захвата изображения сделан из листообразного элемента, образованного в виде прямоугольника. На его поверхности несколько (четыре на фиг. 8) черных областей 50a в качестве областей первого цвета объединяются на поверхности калибровочного элемента 50 по прямой линии, тянущейся в вертикальном направлении. К тому же белые области 50b в качестве областей второго цвета размещаются вокруг черных областей 50a. Каждая черная область 50a имеет форму ромба и соприкасается с соседним элементом (элементами) 50 корректировки строки захвата изображения в противостоящих углах.
На основе фиг. 9 будет приведено описание последовательности, в которой устройство измерения высоты пантографа в этом варианте осуществления корректирует строку захвата изображения в линейном датчике 20. Как показано на фиг. 9, в случае корректировки положения строки захвата изображения в линейном датчике 20 в этом варианте осуществления прежде всего элемент 50 корректировки строки захвата изображения прикрепляется к калибровочному элементу 40 таким образом, чтобы направление, в котором объединяются черные области 50a, совпадало с центром о по ширине калибровочного элемента 40 (этап PB1).
Потом изображение элемента 50 корректировки строки захвата изображения захватывается линейным датчиком 20 и показывается на мониторе 60 (этап PB2). Вообще говоря, в этом случае одно из изображений, показанных в частях (а), (b) и (с) фиг. 11, отображается на мониторе 60. Отметим, что строка S захвата изображения в линейном датчике 20 отклоняется от центра о, если в изображении появляются поочередно черные и белые области, как показано в части (а) или (b) фиг. 11. С другой стороны, строка S захвата изображения совпадает с центром о элемента 50 корректировки строки захвата изображения, если цветные области одинакового цвета отображаются в виде непрерывной области, как показано в части (с) фиг. 11.
Потом корректируется положение строки захвата изображения (этап PB3). В частности, если изображение захватывается в положении, которое приводит к расположению строки S захвата изображения в линейном датчике 20, которое показано в части (а) фиг. 10, то на мониторе 60 отображается изображение, которое показано в части (а) фиг. 11, то есть изображение, в котором каждая черная область 50b и каждая белая область 50w имеют соответствующие одинаковые ширины. В этом случае, поскольку строка захвата изображения в линейном датчике 20 параллельна, но находится вне центра о, строка S захвата изображения может корректироваться путем сдвига ориентации линейного датчика 20 горизонтально во время проверки изображения, показанного на мониторе 60. Между прочим, ориентация линейного датчика 20 должна сдвигаться в таком направлении, чтобы сдвиг привел к увеличению ширин черных областей 50a, показанных на мониторе 60.
Кроме того, если изображение захватывается в положении, которое приводит к расположению строки S захвата изображения в линейном датчике 20, которое показано в части (b) фиг. 10, то на мониторе 60 отображается изображение, которое показано в части (b) фиг. 11, то есть изображение, в котором черные и белые области 50b, 50w имеют соответствующие разные ширины. В этом случае строка S захвата изображения в линейном датчике 20 наклоняется относительно центра о. По этой причине при проверке изображения, показанного на мониторе 60, строку S захвата изображения в линейном датчике 20 следует переместить, чтобы она стала параллельной центру о, с помощью: прежде всего поворота строки захвата изображения в линейном датчике 20 до такой степени, что ширины черных областей 50a становятся практически равными и ширины белых областей с тем же успехом становятся практически равными; и впоследствии перемещения линейного датчика 20 горизонтально.
В результате такой корректировки строки S захвата изображения, как показано в части (с) фиг. 11, черные области 50a (или белые области) могут отображаться соответственно как непрерывная область, положение и ориентация строки S захвата изображения можно скорректировать для совпадения с центром о элемента 50 корректировки строки захвата изображения.
После корректировки строки S захвата изображения в линейном датчике 20 элемент 50 корректировки строки захвата изображения отсоединяется от калибровочного элемента 40 (этап PB4), а затем выполняется калибровочная обработка, описанная в Варианте 1 осуществления (этап PB5).
Благодаря описанной выше конфигурации устройство измерения высоты пантографа в этом варианте осуществления позволяет любому оператору легко выполнить действие по приведению строки захвата изображения в линейном датчике 20 к совпадению с центром о калибровочного элемента 40.
Кроме того, поскольку калибровка может выполняться со строкой S захвата изображения в линейном датчике 20, совпадающей с центром о калибровочного элемента 40, высоту пантографа 10a можно измерить очень точно.
Следует отметить, что, хотя в качестве вышеупомянутого варианта осуществления показан момент, где элемент 50 корректировки строки захвата изображения имеет ромбовидные черные области 50b на фоне белых областей 50w, белые области 51w могут иметь форму ромба на фоне черных областей 51b, как в случае элемента 51 корректировки строки захвата изображения, показанного в части (а) фиг. 13. Кроме того, форма каждой области первого цвета не ограничивается формой ромба. Достаточно, чтобы вертикальная ширина в ее горизонтальном центре была больше вертикальных ширин обоих сторон центра, как и в случае элемента 52 корректировки строки захвата изображения, показанного в части (b) фиг. 13, в котором области 52b первого цвета имеют форму эллипса каждая, а их окружением являются области 52w второго цвета. Разумеется, различные изменения можно сделать в рамках объема, не отклоняясь от сущности настоящего изобретения.
Вариант 3 осуществления
Как упоминалось ранее, в случае использования способа в Патентном документе 2 линейный датчик 20 размещается в таком положении, чтобы быть обращенным наклонно вверх, как показано на фиг. 30. В этом случае разрешение отличается между пантографом 10a, помещенным в нижнее положение, и пантографом 10a, помещенным в верхнее положение, из-за соотношения между направлением перемещения пантографа 10a и углом возвышения линейного датчика 20. В частности, как показано на фиг. 30, разрешение выше в нижнем положении и ниже в верхнем положении. Между прочим, причина того, почему разрешение выше, когда пантограф 10a находится в нижнем положении, состоит в том, что пантограф 10a ближе по расстоянию к линейному датчику 20, находясь в нижнем положении.
Способы калибровки, которые описаны в Вариантах 1 и 2 осуществления, предложены для решения вышеупомянутой разности в разрешении. Варианты 1 и 2 осуществления дают возможность выполнять калибровку автоматически посредством: захвата изображений калибровочного элемента 40 с использованием линейного датчика 20; и подвергания тех изображений обработке изображений.
Однако Варианты 1 и 2 осуществления требуют корректировки строки захвата изображения в линейном датчике 20 во время калибровки. Элемент 50 корректировки строки захвата изображения, который показан на фиг. 27, используется для корректировки строки захвата изображения в линейном датчике 20. Как указано номером 50L ссылки в части (а) фиг. 27, вершины прямоугольников выравниваются по прямой линии. Поэтому часть, соответствующая элементу 50 корректировки строки захвата изображения, станет полностью черной в захваченном изображении, если строка захвата изображения в линейном датчике 20 совпадает с прямой линией. Затем выполняется корректировка наряду с проверкой ширин черных и белых областей и т.п. в захваченном изображении, чтобы часть изображения, которая соответствует элементу 50 корректировки строки захвата изображения, могла стать черной. Между прочим, как показано в части (b) или (с) фиг. 27, черные и белые тона можно поменять местами, либо окружности могут использоваться вместо прямоугольников.
В случае использования элемента 50 корректировки строки захвата изображения в части (а) фиг. 27 для проведения корректировки, как показано в части (а) фиг. 29, белые области будут отображаться с неровными ширинами, если изображение захватывается по диагонали, как указано с помощью S в части (а) фиг. 28. Линейный датчик 20 поворачивается либо по часовой стрелке, либо против часовой стрелки до такой степени, что ширины белых областей становятся ровными, как показано в части (b) фиг. 29, чтобы установить строку захвата изображения в линейном датчике параллельно средней линии 50Lc в части (а) фиг. 27.
Ширины в действительности не становятся ровными, потому что линейный датчик 20 обращен наклонно вверх. Наклон линейного датчика 20 корректируется так, что ширины белых областей становятся меньше в направлении вправо (ширины белых областей становятся больше в направлении вправо в зависимости от строки захвата изображения). Оставаясь в этом состоянии, линейный датчик 20 перемещается горизонтально для корректировки линейного датчика 20 в таком направлении, что горизонтальное перемещение увеличивает ширины черных областей. Корректировка строки захвата изображения завершается, как только часть в захваченном изображении, которая соответствует элементу 50 корректировки строки захвата изображения, в конечном счете становится полностью черной, как показано в части (с) фиг. 29.
Хотя строку захвата изображения можно исправить по вышеприведенному способу, корректировка может выполняться эффективнее, если доступны способы, которые приведены ниже:
(1) способ, который позволяет объективное определение, подходит ли направление, в котором поворачивается линейный датчик 20, для корректировки наклона строки захвата изображения;
(2) способ, который позволяет корректировку при просмотре захваченного изображения, не заботясь о фактическом вращении и горизонтальном перемещении линейного датчика 20; и
(3) способ корректировки, который не требует восприятия или опыта оператора и является более универсальным.
В связи с вышеизложенным устройство измерения высоты пантографа и способ его калибровки в этом варианте осуществления конфигурируются так, что в дополнение к результатам способов в Вариантах 1 и 2 осуществления корректировку строки захвата изображения можно выполнить эффективнее при просмотре захваченного изображения без необходимости восприятия или опыта оператора во время калибровки, выполняемой для измерения высоты пантографа 10a с использованием линейного датчика 20.
Конфигурация устройства измерения высоты пантографа в этом варианте осуществления будет описываться ниже. Фиг. 15 - вид спереди элементов корректировки строки захвата изображения в этом варианте осуществления. Как показано в части (а) фиг. 15, элемент 100 корректировки строки захвата изображения в устройстве измерения высоты пантографа в этом варианте осуществления имеет шаблон с белой средней линией 101 в части, представляющей целевую строку захвата изображения.
Отметим, что шаблон в элементе 100 корректировки строки захвата изображения не ограничивается шаблоном, который показан в части (а) фиг. 15. Шаблон может быть шаблоном, который показан в части (b) фиг. 15, в котором черные и белые тона инвертированы, или шаблоном, который показано в части (с) фиг. 15, в котором окружности используются вместо прямоугольников. Кроме того, белые части элемента 100 корректировки строки захвата изображения сделаны из материала с высокой отражательной способностью, тогда как его черные части сделаны из материала с низкой отражательной способностью.
Фиг. 16 - схематическое представление, показывающее конфигурацию устройства, применяемую в способе корректировки, использующем элемент корректировки строки захвата изображения в этом варианте осуществления. Как показано на фиг. 16, элемент 100 корректировки строки захвата изображения прикреплен к пантографу 102. Отметим, что фиг. 16 показывает боковую проекцию элемента 100 корректировки строки захвата изображения. Линейный датчик 103 размещается на подставке 104, допускающей горизонтальное перемещение и вращение, чтобы можно было корректировать положение и ориентацию линейного датчика 103. Отметим, что любое средство может применяться вместо подставки 104 при условии, что оно допускает вращение без изменения центра вращения.
Линейный датчик 103, помещенный на подставку 104, размещается на крыше вагона 105, чтобы захватывать изображения элемента 100 корректировки строки захвата изображения. Кроме того, лампа 106 размещается около линейного датчика 103, чтобы изображения черных и белых шаблонов на элементе 100 корректировки строки захвата изображения можно было захватывать в темной обстановке, например в ночное время, внутри тоннеля или в депо. Кроме того, обрабатывающий компьютер 107 размещается внутри вагона 105 для того, чтобы сохранять изображения, захваченные линейным датчиком 103.
Фиг. 17 - блок-схема, показывающая пример конфигурации, применяемой в способе корректировки, использующем элемент корректировки строки захвата изображения в Варианте 3 осуществления настоящего изобретения. Как показано на фиг. 17, способ корректировки, использующий элемент 100 корректировки строки захвата изображения в этом варианте осуществления, снабжается: "линейным датчиком 103", который конфигурируется для захвата изображения элемента 100 корректировки строки захвата изображения и чья строка захвата изображения корректируется оператором 108; "обрабатывающим компьютером 107", который хранит и отображает захваченное изображение и который нужен оператору 108 для корректировки строки захвата изображения при проверке изображения; и "элементом 100 корректировки строки захвата изображения", который является съемным для строки захвата изображения в линейном датчике 103, чтобы легко корректировать ее. Вышеприведенное является конфигурацией устройства измерения высоты пантографа в этом варианте осуществления.
Способ калибровки для устройства измерения высоты пантографа в этом варианте осуществления будет описываться ниже. Фиг. 18 - блок-схема алгоритма, показывающая способ корректировки, использующий элемент корректировки строки захвата изображения в этом варианте осуществления. Между прочим, элемент 100 корректировки строки захвата изображения, который должен использоваться здесь, является элементом, показанным в части (а) фиг. 15.
Как показано на фиг. 18, на этапе P100 элемент 100 корректировки строки захвата изображения прикрепляется к пантографу 102. В этом случае средняя линия 101 элемента 100 корректировки строки захвата изображения задается совпадающей с линией, где планируется захватить изображение. Далее на этапе P101 изображения элемента 100 корректировки строки захвата изображения захватываются линейным датчиком 103.
Потом на этапе P102 линейный датчик 103 перемещается горизонтально наряду с проверкой всего захваченного изображения. В этом случае линейный датчик 103 перемещается в таком направлении, что перемещение заставляет черные части элемента 100 корректировки строки захвата изображения в изображении стать больше, чтобы среднюю линию 101 элемента 100 корректировки строки захвата изображения можно было захватить в изображении, как показано на фиг. 19. Отметим, что в каждой из фиг. 19-22 Io обозначает центр изображения, Ia обозначает элемент 100 корректировки строки захвата изображения в изображении, а Ic обозначает среднюю линию 101 элемента 100 корректировки строки захвата изображения в изображении.
После этого на этапе P103 если средняя линия 101 элемента 100 корректировки строки захвата изображения, которая обозначается с помощью Ic, присутствует в положении далеко от центра изображения, обозначенного с помощью Io, на элементе 100 корректировки строки захвата изображения в изображении, обозначенном Ia, как показано на фиг. 19, то линейный датчик 103 перемещается горизонтально до тех пор, пока средняя линия 101 элемента 100 корректировки строки захвата изображения, обозначенная с помощью Ic, на элементе 100 корректировки строки захвата изображения, обозначенном с помощью Ia, не станет ближе к центру изображения, обозначенному с помощью Io, как показано на фиг. 20.
Потом на этапе P104 поворачивается линейный датчик 103. В этом случае, как показано на фиг. 21, линейный датчик 103 поворачивается таким образом, что средняя линия 101 элемента 100 корректировки строки захвата изображения перемещается в положение далеко от центра изображения, обозначенного Io, внутри части, соответствующей элементу 100 корректировки строки захвата изображения в изображении, обозначенному Ia.
Затем этапы с P102 по P104 повторяются до тех пор, пока на этапе P105 часть, соответствующая элементу 100 корректировки строки захвата изображения в изображении, обозначенному Ia, не станет полностью белой, как показано на фиг. 22. Когда строка захвата изображения совпадает со средней линией 101 элемента 100 корректировки строки захвата изображения, последовательность процессов завершается. Вышеприведенное является способом калибровки для устройства измерения высоты пантографа в этом варианте осуществления.
Здесь будет описываться принцип способа корректировки строки захвата изображения в этом варианте осуществления. Фиг. 23 - схема, показывающая пример строки захвата изображения, на которой еще не выполнена горизонтальная корректировка. Изображение, захваченное в этот момент, показано на фиг. 19. Изображение средней линии 101 в элементе 100 корректировки строки захвата изображения, обозначенной с помощью Ic, захватывается в положении далеко от центра изображения, обозначенного с помощью Io. Отметим, что S и Sc на фиг. 23 обозначают строку захвата изображения в линейном датчике 103 и центр строки захвата изображения в линейном датчике 103 соответственно.
Далее строка захвата изображения корректируется в горизонтальном направлении. Фиг. 24 - схема, показывающая пример строки захвата изображения, на которой выполнена горизонтальная корректировка. В этом случае, если средняя линия 101 элемента 100 корректировки строки захвата изображения, обозначенная с помощью Ic, становится ближе к центру изображения, обозначенному с помощью Io, как показано на фиг. 20, то это означает, что центр строки захвата изображения в линейном датчике 103, который обозначается с помощью Sc, становится ближе к средней линии 101 элемента 100 корректировки строки захвата изображения, как указано с помощью M на фиг. 24. Отметим, что S, Sc, S' и M на фиг. 24 обозначают строку захвата изображения в линейном датчике 103, центр строки захвата изображения в линейном датчике 103, строку захвата изображения в линейном датчике 103 до горизонтальной корректировки и горизонтальную корректировку строки захвата изображения соответственно.
Если центр строки захвата изображения в линейном датчике 103, который обозначается Sc, не оказывается совпадающим с продолжением средней линии 101 элемента 100 корректировки строки захвата изображения, то строка захвата изображения в линейном датчике 103, которая обозначается с помощью S, никогда не совпадает со средней линией 101 элемента 100 корректировки строки захвата изображения. Так как приведение строки захвата изображения в линейном датчике 103, которая обозначается с помощью S, к совпадению со средней линией 101 элемента 100 корректировки строки захвата изображения является конечной целью, центр строки захвата изображения в линейном датчике 103, которая обозначается с помощью S, нужно привести ближе к средней линии 101 элемента 100 корректировки строки захвата изображения.
Другими словами, среднюю линию 101 элемента 100 корректировки строки захвата изображения в изображении, которая обозначается с помощью Ic, нужно перенести ближе к центру изображения, который обозначается с помощью Io в изображении. Завершение этапа P103 означает, что центр строки захвата изображения в линейном датчике 103, указанный с помощью Sc, находится около средней линии 101 элемента 100 корректировки строки захвата изображения.
Затем строка захвата изображения корректируется во вращательном направлении.
Фиг. 25 - схема, показывающая пример строки захвата изображения, на которой выполнена вращательная корректировка.
В этом случае в изображении, если средняя линия 101 элемента 100 корректировки строки захвата изображения в изображении, которая обозначается с помощью Ic, удаляется от центра изображения, который обозначается с помощью Io в изображении, как показано на фиг. 21, то это означает, что линейный датчик 103 поворачивается, как указано с помощью R на фиг. 25. Отметим, что S, Sc, S" и R на фиг. 25 обозначают строку захвата изображения в линейном датчике 103, центр строки захвата изображения в линейном датчике 103, строку захвата изображения в линейном датчике 103 до горизонтальной корректировки и вращательную корректировку строки захвата изображения соответственно.
Чтобы строка захвата изображения в линейном датчике 103, которая обозначается с помощью S, совпадала со средней линией 101 элемента 100 корректировки строки захвата изображения, строка захвата изображения в линейном датчике 103, которая обозначается с помощью S, должна быть параллельна средней линии 101 элемента 100 корректировки строки захвата изображения.
Соответственно, строку захвата изображения в линейном датчике 103, которая обозначается с помощью S, нужно повернуть в таком направлении, что вращение сделает строку захвата изображения параллельной средней линии 101 элемента 100 корректировки строки захвата изображения. Для выполнения этого строку захвата изображения нужно повернуть в направлении, показанном на фиг. 25. В частности, как показано на фиг. 21, средняя линия 101 элемента 100 корректировки строки захвата изображения, которая обозначается с помощью Ic, нужно отдалить от центра изображения, который обозначается с помощью Io в изображении.
Завершение этапа P104 означает, что строка захвата изображения в линейном датчике 103 поворачивается в направлении, в котором строка захвата изображения становится параллельна средней линии 101 элемента 100 корректировки строки захвата изображения.
Отметим, что, когда линейный датчик 103 поворачивается на этапе P104, он должен поворачиваться без изменения положения центра строки захвата изображения в линейном датчике 103, обозначенного с помощью Sc. Поэтому необходимо использовать такое средство, как подставку 104, чей центр вращения не перемещается. Между прочим, любое средство может использоваться вместо подставки 104 при условии, что его центр вращения не перемещается.
Фиг. 26 - схема, показывающая пример строки захвата изображения, на которой выполнены корректировки.
Повторяя этапы с P102 по P104, строка захвата изображения в линейном датчике 103, которая обозначается с помощью S, может совпадать со средней линией 101 элемента 100 корректировки строки захвата изображения, как показано на фиг. 26, при помощи чего можно получить изображение, которое показано на фиг. 22. Отметим, что S и Sc на фиг. 26 обозначают строку захвата изображения в линейном датчике 103 и центр строки захвата изображения в линейном датчике 103 соответственно.
Кроме того, даже когда элемент 100 корректировки строки захвата изображения в изображении, который обозначается с помощью Ia, находится с левой стороны от центра изображения, обозначенного с помощью Io, вместо правой стороны в изображении, как показано на фиг. 19, принцип способа корректировки будет такой же.
Как описано выше, устройство измерения высоты пантографа и способ его калибровки в этом варианте осуществления позволяют объективно определить, подходит ли направление, в котором поворачивается линейный датчик 103, для корректировки наклона строки захвата изображения.
Кроме того, корректировку можно сделать при просмотре захваченного изображения, не заботясь о фактическом вращении и горизонтальном перемещении линейного датчика 103.
Кроме того, корректировку можно сделать простым и универсальным способом без необходимости какого-либо восприятия или опыта оператора.
К тому же, поскольку точность калибровки увеличивается, высоту пантографа 102 можно точно измерить.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Настоящее изобретение предпочтительно применимо к устройствам измерения высоты пантографа и способам их калибровки.
ОБЪЯСНЕНИЕ НОМЕРОВ ССЫЛОК
1, 3A, 3B, 3C калибровочное изображение
2 двоичное изображение
10 вагон
20 линейный датчик
30 обрабатывающий компьютер
31 блок создания входного изображения
32 блок бинаризации
33 блок извлечения ширины пикселя
34 арифметический блок приближенного выражения
35A, 35B запоминающее устройство
40 калибровочный элемент
40b черная область
40w белая область
50 элемент корректировки строки захвата изображения
50b черная область
50w белая область
60 монитор
S строка захвата изображения
100 элемент корректировки строки захвата изображения
101 средняя линия
102 пантограф
103 линейный датчик
104 подставка
105 вагон
106 лампа
107 обрабатывающий компьютер
108 оператор
Изобретение относится к области электрифицированного железнодорожного транспорта. Предложено устройство измерения высоты пантографа, которое дает возможность простой калибровки при измерении высоты пантографа (10а). Устройство измерения высоты пантографа снабжается: линейным датчиком (20), помещенным на крышу вагона (10), обрабатывающим компьютером (30) для анализа изображения, захваченного линейным датчиком (20) и калибровочным элементом (40), предоставленным разъемно в диапазоне, включающем диапазон перемещения пантографа (10а), и имеющим черные области и белые области, расположенные поочередно в вертикальном направлении. Обрабатывающий компьютер (30) находит приближенное выражение для вычисления высоты воздушного провода, при этом приближенное выражение является выражением отношения, представляющим отношение между положениями черных областей и белых областей в изображении и фактическими высотами черных областей и белых областей (40w), при этом положения получаются из изображения калибровочного элемента (40), которое захватывается линейным датчиком (20). Технический результат заключается в обеспечении надежности работы устройства и точности измерения. 4 з.п. ф-лы, 30 ил.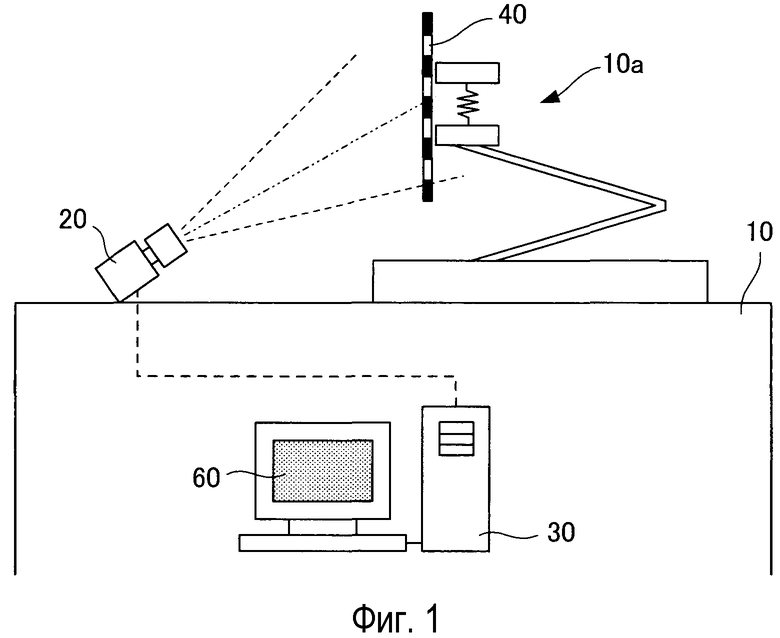
1. Устройство измерения высоты пантографа, включающее линейный датчик и средство обработки изображений, для измерения высоты пантографа на вагоне, который движется, причем линейный датчик помещен на крышу вагона, средство обработки изображений сконфигурировано для анализа изображения, захваченного линейным датчиком, отличающееся тем, что калибровочный элемент, на котором области темного цвета и области светлого цвета размещаются поочередно в вертикальном направлении, предоставляется разъемно в диапазоне, включающем диапазон перемещения пантографа, и средство обработки изображений конфигурируется для получения выражения отношения, представляющего отношение между положениями областей темного цвета и областей светлого цвета в изображении и фактическими высотами областей темного цвета и областей светлого цвета, и вычисления фактической высоты пантографа из положения пантографа в изображении, которое захвачено линейным датчиком, с использованием выражения отношения, причем положения областей темного цвета и областей светлого цвета получаются из изображения калибровочного элемента, захваченного линейным датчиком.
2. Устройство измерения высоты пантографа по п.1, отличающееся тем, что элемент корректировки строки захвата изображения, имеющий множество областей первого цвета, объединенных в вертикальном направлении, и областей второго цвета, расположенных вокруг областей первого цвета, предоставляется разъемно к калибровочному элементу, устройство измерения высоты пантографа содержит средство отображения для отображения изображения, захваченного линейным датчиком, и
формы областей первого цвета в элементе корректировки строки захвата изображения устанавливаются так, что ширины областей первого цвета и областей второго цвета, показанных на средстве отображения, меняются в зависимости от положения и наклона строки захвата изображения в линейном датчике.
3. Устройство измерения высоты пантографа по п.2, отличающееся тем, что в элементе корректировки строки захвата изображения области первого цвета образуются имеющими вертикальную ширину больше в горизонтальном центре, чем по обеим сторонам горизонтального центра, таким образом, что области первого цвета соприкасаются с соседними областями первого цвета в горизонтальном центре элемента корректировки строки захвата изображения.
4. Устройство измерения высоты пантографа по любому из пп.1-3, отличающееся тем, что средство обработки изображений включает в себя: блок создания входного изображения для создания входного изображения путем упорядочения в хронологическом порядке сигналов изображения, введенных от линейного датчика; блок бинаризации для создания двоичного изображения путем преобразования входного изображения в двоичную форму; блок обнаружения положения окрашенной области для обнаружения положений областей темного цвета и областей светлого цвета в двоичном изображении; и арифметический блок выражения отношения для отыскания выражения отношения на основе положений областей темного цвета и областей светлого цвета в двоичном изображении и фактических положений областей темного цвета и областей светлого цвета.
5. Устройство измерения высоты пантографа по п.2, отличающееся тем, что элемент корректировки строки захвата изображения включает в себя среднюю линию в горизонтальном центре элемента корректировки строки захвата изображения.
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| FR 2882973 A1, 15.09.2006 | |||
| JP 2008104312 A, 01.05.2008. | |||

