Область техники, к которой относится изобретение
Данное изобретение имеет отношение к устройству и способу измерения вертикального ускорения пантографа посредством обработки изображения, в частности к устройству и способу для измерения вертикального ускорения пантографа во входной точке посредством обработки изображения, сфотографированного камерой с линейным датчиком на основе вертикального ускорения пантографа в точке замера (в дальнейшем это называется "вертикальным ускорением"), где камера с линейным датчиком, установленная на кузове транспортного средства, фотографирует изображения движущегося пантографа, и сфотографированные изображения обрабатываются.
Уровень техники изобретения
В случае когда контактный (троллейный) провод, растянутый на уровне земли, из-за теплового расширения контактного провода и давления ветра прогибается по направлению к пантографу, установленному на крыше кузова транспортного средства для электрифицированной железной дороги, пантограф, установленный на крыше кузова транспортного средства для электрифицированной железной дороги, опускается на уровень высоты ниже, чем уровень высоты, установленный ранее посредством входа в контакт с контактным проводом. Как результат, контактный провод и пантограф отсоединяются друг от друга. Такое отсоединение контактного провода от пантографа вызывает аномальный износ контактного провода. Поэтому необходимо растянуть контактный провод и поддерживать вертикальное ускорение на постоянной величине для того, чтобы увеличить срок службы контактного провода.
В качестве обычных способов измерения вертикального ускорения такого пантографа были известны: один способ измерения вертикального ускорения для вычисления вертикального ускорения, регистрируемого множеством датчиков ускорения, установленных на пантографе (например, раскрытый в непатентном документе 1 и патентном документе 1, как упомянуто ниже), и другой способ измерения вертикального ускорения для обработки изображения движущегося вертикально пантографа, записываемого камерой с линейным датчиком, установленной на крыше корпуса поезда (например, раскрытый в упомянутых ниже патентных документах 2 и 3).
Предшествующий уровень техники
Патентный документ
Патентный документ 1: нерассмотренная патентная публикация Японии № 2003-156397
Патентный документ 2: нерассмотренная патентная публикация Японии № 2006-250774
Патентный документ 3: нерассмотренная патентная публикация Японии № 2003-341389
Непатентный документ
Непатентный документ 1: “Разработка системы измерения контакта пантографа и полезность ее данных”, написанный Iwainaka, Sato и Izuno (JK EAST Technical Review - № 10, pр.68-72)
Сущность изобретения
Проблема, решаемая изобретением
В вышеупомянутом способе крайнее высокое напряжение 2,5 кВ, регистрируемое датчиками ускорения, протекает через пантограф, на котором установлены датчики ускорения. Поэтому выходной сигнал датчиков ускорения не может быть напрямую передан внутрь корпуса поезда. Выход датчиков ускорения передается телеметрическим передатчиком или оптическим кабелем. В случае передачи выхода телеметрическим передатчиком необходимо заменять электрическую батарею после прохождения соответствующего периода времени. В случае передачи выхода через оптический кабель, есть проблемы ввиду явления дрейфа выхода из-за некоторой неустойчивости и температурных условий.
В способе с камерой с линейным датчиком преимуществом является бесконтактный тип измерения вертикального перемещения пантографа. Камера с линейным датчиком обеспечена в некоторой точке, отделенной от точки контакта между пантографом и контактным проводом (входная точка), так что степень точности не может быть существенно улучшена. Чтобы улучшить степень точности, можно обеспечить множество камер с линейным датчиком. Однако если так сделать, то размер инструмента измерения становится большим.
Чтобы разрешить вышеупомянутые недостатки, целью данного изобретения является обеспечение компактного устройства и способа для измерения вертикального ускорения пантографа посредством обработки изображения, где компактное устройство способно измерять вертикальное ускорение пантографа с высокой точностью.
Средство для решения проблемы
Чтобы разрешить вышеупомянутые недостатки, устройством измерения вертикального ускорения пантографа согласно первому изобретению является устройство измерения вертикального ускорения пантографа посредством обработки изображения пантографа, сфотографированного камерой с линейным датчиком, установленной на кузове транспортного средства в части обработки изображения, устройство измерения вертикального ускорения пантографа отличается тем, что часть обработки изображения содержит средство ввода изображения для ввода изображения пантографа, сфотографированного в точке замера камерой с линейным датчиком, средство обнаружения положения пантографа для обнаружения положения пантографа в изображении, записанном в камере с линейным датчиком, посредством обработки изображения, и средство вычисления ускорения пантографа для вычисления вертикального ускорения пантографа в точке контакта с контактным проводом в соответствии с положением пантографа в изображении линейного датчика, одной или более ранее обнаруженными передаточными функциями и отклоненным положением пантографа.
В устройстве измерения вертикального ускорения пантографа посредством обработки изображения пантографа согласно второму изобретению устройство измерения вертикального ускорения пантографа согласно первому изобретению отличается тем, что часть обработки изображения содержит средство вычисления передаточной функции для вычисления передаточной функции в соответствии с вертикальным ускорением пантографа, обнаруженным по положению пантографа в изображении линейного датчика, в момент, когда вертикальная сила вибрации прилагается вертикально к пантографу в одной или более точках вибрации, и с вертикальным ускорением пантографа в точках вибрации.
В устройстве измерения вертикального ускорения пантографа посредством обработки изображения согласно третьему изобретению устройство измерения вертикального ускорения пантографа согласно первому изобретению отличается тем, что камера с линейным датчиком установлена на платформе камеры, и направление фотографирования камеры с линейным датчиком регулируется.
Способом измерения вертикального ускорения пантографа посредством обработки изображения согласно четвертому изобретению является способ измерения вертикального ускорения пантографа посредством обработки изображения пантографа, сфотографированного камерой с линейным датчиком, установленной на кузове транспортного средства в части обработки изображения, где способ измерения вертикального ускорения пантографа отличается тем, что часть обработки изображения содержит этап ввода данных изображения из камеры с линейным датчиком, этап обнаружения положения пантографа в точке замера в изображении линейного датчика посредством сравнения с изображением линейного датчика, сформированным при помощи входных данных изображения и ранее сохраненной модели сопоставления образца, и этап вычисления вертикального ускорения пантографа в точке контакта с контактным проводом в соответствии с вертикальным ускорением, обнаруженным по положению пантографа в изображении линейного датчика, и одной или более ранее обнаруженными передаточными функциями.
В способе измерения вертикального ускорения пантографа согласно пятому изобретению способ измерения вертикального ускорения пантографа согласно четвертому изобретению отличается тем, что вертикальная вибрация прилагается к одной или более входным точкам на пантографе одновременно с фотографированием пантографа в точке замера так, что передаточные функции вычисляются на основании вертикального ускорения пантографа во входной точке и вертикального ускорения пантографа в точке замера в изображении линейного датчика, сформированного сфотографированными изображениями.
Эффект изобретения
Согласно устройству измерения вертикального ускорения пантографа посредством обработки изображения первого изобретения первым изобретением является устройство измерения вертикального ускорения пантографа посредством обработки изображения пантографа, сфотографированного камерой с линейным датчиком, установленной на кузове транспортного средства в части обработки изображения, где устройство измерения вертикального ускорения пантографа отличается тем, что часть обработки изображения содержит средство ввода изображения для ввода изображения пантографа, сфотографированного в точке замера камерой с линейным датчиком, средство обнаружения положения пантографа для обнаружения положения пантографа на изображении, записанном в камере с линейным датчиком, посредством обработки изображения и средство вычисления ускорения пантографа для вычисления вертикального ускорения пантографа в точке контакта с контактным проводом в соответствии с положением пантографа в изображении линейного датчика, одной или более ранее обнаруженными передаточными функциями и отклоненным положением пантографа. Как результат, хотя первое изобретение является компактным устройством, устройство может снимать измерения с пантографа бесконтактным способом и сохранять измеренные данные. С другой стороны, устройство с высокой точностью может вычислять вертикальное ускорение пантографа в точке контакта с пантографом и с контактным проводом.
Согласно устройству измерения вертикального ускорения пантографа посредством обработки изображения пантографа второго изобретения устройство измерения вертикального ускорения пантографа отличается тем, что часть обработки изображения содержит средство вычисления передаточной функции для вычисления передаточной функции в соответствии с вертикальным ускорением пантографа, обнаруженным по положению пантографа в изображении линейного датчика, в момент, когда вертикальная сила вибрации прилагается вертикально к пантографу в одной или более точках вибрации, и вертикальным ускорением пантографа в точках вибрации. Как результат, вычисление передаточной функции и измерение вертикального ускорения пантографа в точке контакта с пантографом и с контактным проводом обрабатываются одним устройством второго изобретения так, что удобство и эффективность устройства улучшаются.
Согласно устройству измерения вертикального ускорения пантографа посредством обработки изображения третьего изобретения устройство измерения вертикального ускорения пантографа отличается тем, что камера с линейным датчиком установлена на платформе камеры, и направление фотографирования камерой с линейным датчиком регулируемо. Как результат, можно понизить вероятность неверного обнаружения пантографа.
Способом измерения вертикального ускорения пантографа посредством обработки изображения четвертого изобретения является способ измерения вертикального ускорения пантографа посредством обработки изображения пантографа, сфотографированного камерой с линейным датчиком, установленной на кузове транспортного средства в части обработки изображения, причем способ измерения вертикального ускорения пантографа отличается тем, что часть обработки изображения содержит этап ввода данных изображения из камеры с линейным датчиком, этап обнаружения положения пантографа в точке замера в изображении линейного датчика посредством сравнения с изображением линейного датчика, сформированным при помощи входных данных изображения и ранее сохраненной модели для сопоставления образца, и этап вычисления вертикального ускорения пантографа в точке контакта с контактным проводом в соответствии с вертикальным ускорением, обнаруженным по положению пантографа в изображении линейного датчика, и одной или более ранее обнаруженными передаточными функциями. Как результат, даже если способ представляет собой операцию посредством компактного устройства, устройство может снимать измерения с пантографа бесконтактным способом и сохранять измеренные данные. С другой стороны, способ четвертого изобретения может с высокой точностью вычислять вертикальное ускорение пантографа в точке контакта с пантографом и контактным проводом.
Согласно способу измерения вертикального ускорения пантографа пятого изобретения способ измерения вертикального ускорения пантографа отличается тем, что вертикальная вибрация прилагается к одной или более входным точкам на пантографе одновременно с фотографированием пантографа в точке замера так, что передаточные функции вычисляются на основе вертикального ускорения пантографа во входной точке и вертикального ускорения пантографа в точке замера в изображении линейного датчика, сформированном сфотографированными изображениями. Как результат, этап вычисления передаточной функции и этап измерения вертикального ускорения пантографа в точке контакта пантографом и контактным проводом обрабатывается одним устройством так, что удобство и эффективность способа улучшаются.
Краткое описание чертежей
Фиг.1 показывает схематичное строение первого варианта воплощения устройства измерения вертикального ускорения пантографа посредством обработки изображения согласно данному изобретению.
Фиг.2 - блок-схема для демонстрации компонентов в части обработки изображения первого варианта воплощения устройства измерения вертикального ускорения пантографа согласно данному изобретению.
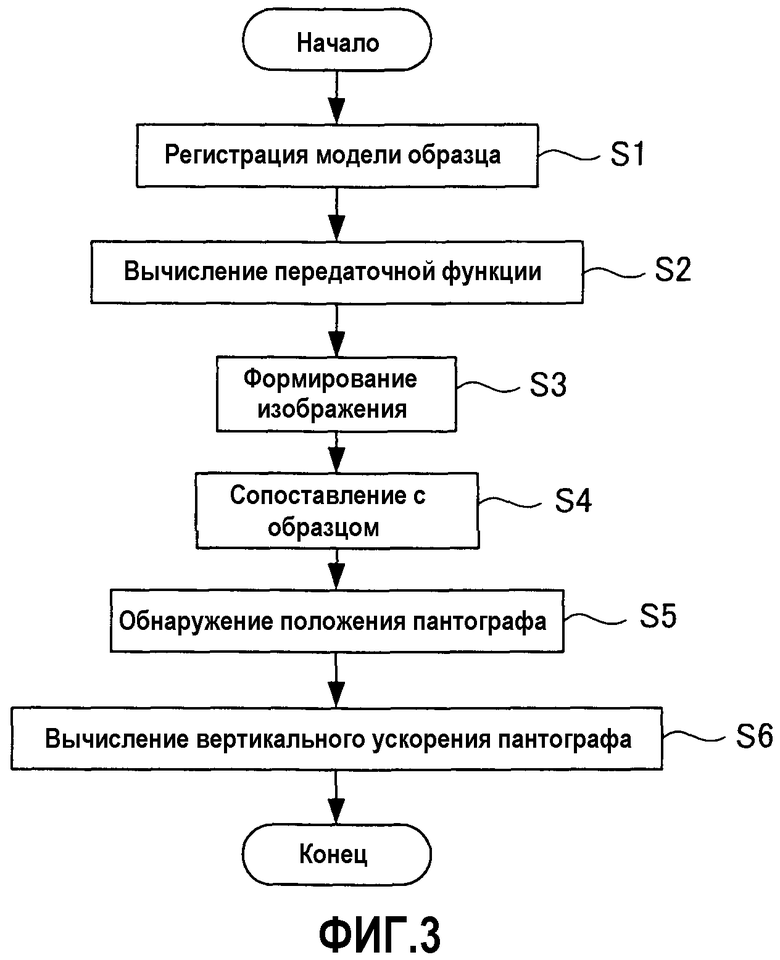
Фиг.3 - блок-схема последовательности для демонстрации процесса части обработки изображения первого варианта воплощения согласно данному изобретению.
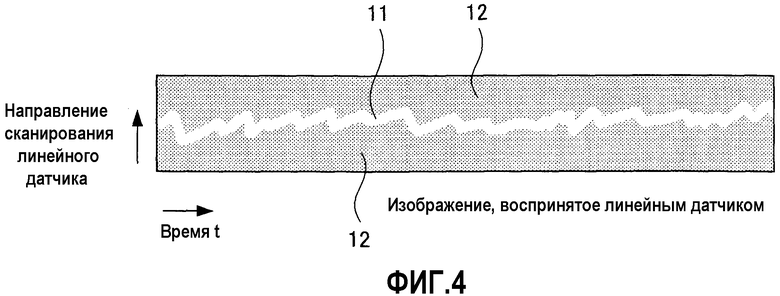
Фиг.4 показывает образец картинки линейного датчика, полученной камерой с линейным датчиком первого варианта воплощения, согласно данному изобретению.
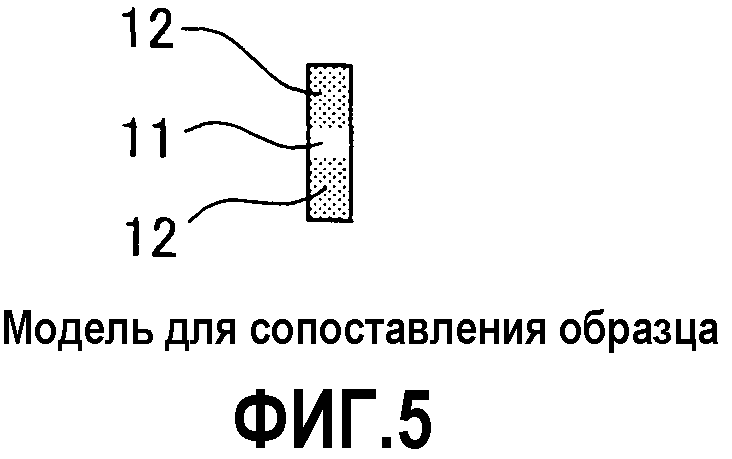
Фиг.5 показывает пример модели сопоставления образца первого варианта воплощения согласно данному изобретению.
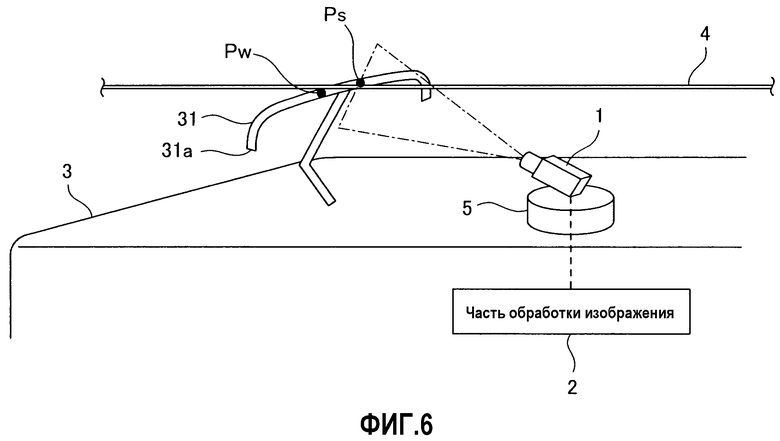
Фиг.6 показывает схематичное строение второго варианта воплощения устройства измерения вертикального ускорения пантографа посредством обработки изображения согласно данному изобретению.
Вариант воплощения для применения изобретения
Варианты воплощения данного изобретения будут описаны ниже.
Вариант воплощения 1
Со ссылкой на фиг. 1-5 будет описан первый вариант воплощения данного изобретения. Фиг.1 показывает схематичное строение первого варианта воплощения устройства для измерения вертикального ускорения пантографа посредством обработки изображения согласно данному изобретению. Фиг.2 - блок-схема для демонстрации компонентов в части обработки изображения первого варианта воплощения устройства измерения вертикального ускорения пантографа согласно данному изобретению. Фиг.3 - блок-схема последовательности для демонстрации процесса части обработки изображения первого варианта воплощения согласно данному изобретению. Фиг.4 показывает образец картинки линейного датчика, полученной камерой с линейным датчиком первого варианта воплощения, согласно данному изобретению. Фиг.5 показывает пример модели сопоставления с образцом первого варианта воплощения согласно данному изобретению.
Как показано на фиг.1, вариант воплощения устройства для измерения вертикального ускорения пантографа посредством обработки изображения содержит камеру 1 с линейным датчиком и часть 2 обработки изображения.
Пантограф 31 установлен на крыше 3 корпуса поезда, и камера 1 с линейным датчиком также установлена на крыше. Камера 1 с линейным датчиком наклонена относительно крыши. Таким образом, у оптической оси камеры с линейным датчиком есть угол возвышения так, чтобы камера 1 с линейным датчиком могла захватить изображение пантографа, расположенного в заданной позиции точки замера Ps. Направление сканирования камеры 1 с линейным датчиком расположено так, чтобы быть перпендикулярным пантографу 31. Таким образом, направлением сканирования является вертикальное направление.
В части 2 обработки изображения варианта воплощения происходит вычисление передаточной функции и вертикального ускорения. Как показано на фиг.2, часть 2 обработки изображения содержит часть 21 ввода изображения, часть 22 записи изображения, часть 23 обнаружения положения пантографа, часть 24 вычисления передаточной функции, часть 25 записи данных и часть 26 вычисления вертикального ускорения пантографа.
В качестве средства ввода изображения, часть 21 ввода изображения обеспечена для того, чтобы последовательно вводить изображения, записанные камерой 1 с линейным датчиком с заданным временным интервалом. Часть 22 записи изображения обеспечена для того, чтобы сохранять данные изображения, вводимые средством 21 ввода изображения. В части 22 записи изображения заранее сохраняется модель для сопоставления образца для сравнения записанных изображений и модели для сопоставления образца.
В качестве средства обнаружения положения пантографа обеспечена часть 23 обнаружения положения пантографа для того, чтобы оценивать положение пантографа 31 на изображении линейного датчика, в котором множество данных изображений во временной последовательности, сохраненных в части 22 записи изображения, помещаются по порядку (как показано на фиг.4), и изображение линейного датчика и модели для сопоставления образца сравниваются так, чтобы получить траекторию 11 пантографа посредством распознавания траектории 11 из фона 12 в изображении.
В качестве средства вычисления передаточной функции обеспечено средство 24 вычисления передаточной функции для вычисления передаточной функции H (ω, x) так, чтобы определить фактическое вертикальное ускорение пантографа во входной точке Pw, основанное на вертикальном ускорении пантографа 31 в точке замера Ps, где используются действие траектории 11 пантографа на изображении линейного датчика в момент, когда вертикальная сила вибрации приложена к пантографу 31 во входной точке, положение входной точки (x=xw) в случае, когда положение точки замера Ps на изображении, снятом камерой 1 с линейным датчиком, представляет собой x=0, и вертикальное ускорение пантографа 31 во входной точке Pw.
Часть 25 записи данных обеспечена для того, чтобы сохранять вертикальное ускорение у (t), полученное двойным дифференцированием положения траектории 11 пантографа на изображении линейного датчика, обнаруженном частью 23 обнаружения положения пантографа, передаточную функцию H (ω, x), вычисленную в части 24 вычисления передаточной функции, вертикальное ускорение u (t) пантографа 31, вычисленное частью 26 вычисления вертикального ускорения пантографа, как описано ниже, и так далее.
В качестве средства вычисления вертикального ускорения пантографа обеспечена часть 26 вычисления вертикального ускорения для того, чтобы сохранять вертикальное ускорение (ω, x) в точке контакта, где пантограф 31 соприкасается с контактным проводом 4, в соответствии с передаточной функцией H (ω, x), вычисленной в части 23 вычисления передаточной функции, и точке отклонения x (=xw) контактного провода 4 (входная точка Pw).
В дальнейшем будет описан процесс обнаружения вертикального ускорения u (t) во входной точке Pw пантографа 31, выполняемый частью 2 обработки изображения устройства измерения вертикального ускорения по отношению к пантографу со ссылкой на вариант воплощения, как показано на фиг.3.
Как показано на фиг.3, вначале, в части 2 обработки изображения, заранее записывается (этап S1) модель для сопоставления образца, как показано на фиг.5. Далее производится вычисление передаточной функции H (ω, x) (этап S2).
Передаточная функция H (ω, x) вычисляется на протяжении процесса, как описано ниже. Во-первых, в то время как камера 1 с линейным датчиком записывает заданное положение Ps пантографа 31 в качестве точки замера, вертикальная вибрация прилагается к входной точке Pw, которая удалена от точки замера Ps на расстояние xw, и затем вертикальное ускорение u (t) во входной точке Pw пантографа 31 измеряется датчиком ускорения (не показан).
Изображения, записанные камерой 1 с линейным датчиком, периодически вводятся в часть 21 ввода изображения части 2 обработки изображения с заданным временным интервалом и сохраняются в части 22 записи изображения. Затем в части 23 обнаружения положения пантографа изображения линейного датчика, выводимые из части 22 записи изображения, сравниваются с моделью для сопоставления образца, ранее зарегистрированной, чтобы обнаружить траекторию 11 пантографа на изображениях линейного датчика. Таким образом, обнаруживается положение пантографа в изображении линейного датчика.
Затем в части 24 вычисления передаточной функции дважды дифференцируется положение пантографа 31 в изображении линейного датчика, обнаруженном частью 23 обнаружения положения пантографа, чтобы получить вертикальное ускорение у (t). В соответствии со следующим уравнением (1) передаточная функция H (ω, x) вычисляется по вертикальному ускорению u (t) во входной точке Pw пантографа 31 и вышеупомянутому вертикальному ускорению у (t).
H (ω)=у(ω)/U(ω) (1)
где y (ω) означает вертикальное ускорение y (t) пантографа 31 на изображении линейного датчика, Н (ω) означает передаточную функцию h (t) и U (ω) означает преобразование Фурье фактического вертикального ускорения u (t) пантографа.
Здесь вертикальное ускорение y (t) в точке замера Ps пантографа в изображении линейного датчика в момент, когда вертикальная вибрация приложена к входной точке Pw, передаточная функция h (t) и вертикальное ускорение u (t) пантографа 31 во входной точке Pw показаны в следующем уравнении (2).
Y (t)=∫ h(t)u(t)dt (2)
В соответствии с вышеупомянутым уравнением (2) может быть получено следующее уравнение (3).
Y (ω)=H(ω)•U(ω) (3)
В соответствии с вышеупомянутым уравнением (3) может быть получено вышеупомянутое уравнение (1).
Количество передаточных функций H (ω, x) зависит от желательного режима вибрации пантографа 31. В случае обнаружения режима первого порядка, например, центральная точка (x=x0) пантографа назначается в качестве входной точки, чтобы обнаружить одну передаточную функцию H0 (ω, x). В случае обнаружения режима второго порядка две точки (на левой стороне и правой стороне) пантографа 31 назначаются в качестве входных точек (x=xl, x2), чтобы обнаружить две передаточных функции H1 (ω, x) и H2 (ω, x). Обнаруженная передаточная функция H (ω, x) сохраняется в части 25 записи данных. Здесь, как показано на фиг.3 вышеупомянутого Патентного документа 1 и в его описании, режимом первого порядка является режим 3 вибрации (изгибные колебания первого порядка) и режимом второго порядка - режим 4 вибрации (изгибные колебания второго порядка).
Далее, в то время как поезд едет, точка замера Ps пантографа 31 фотографируется камерой 1 с линейным датчиком, и часть 21 ввода изображения вводит их с заданным временным интервалом, чтобы сохранить их в части 22 записи изображения (этап S3).
Далее в части 23 обнаружения положения пантографа изображение линейного датчика и модель для сопоставления образца, ранее сохраненная, выводятся из части 22 записи изображения. Сравнивая с изображением линейного датчика и моделью для сопоставления образца, извлекается траектория 11 пантографа в изображении линейного датчика (этап S4), чтобы обнаружить положение пантографа 31 в изображении линейного датчика (этап S5).
Затем в части 26 вычисления вертикального ускорения пантографа обычным способом обнаруживается точка отклонения контактного провода 4 (входная точка Pw). Используя передаточную функцию Hn (ω, x) самой близкой точки по отношению к точке отклонения и вертикальное ускорение у (t) в точке Ps, обнаруженное смещением пантографа 31 на изображении линейного датчика, вычислено следующее уравнение (4).
U(ω,x)=Y(ω)/H(ω,X) (4)
Таким образом, получено (этап S6) вертикальное ускорение u (t) в точке отклонения контактного провода 4 (входная точка Pw).
В соответствии с устройством и способом измерения вертикального ускорения пантографа посредством обработки изображения согласно данному варианту воплощения ускорение во входной точке может быть вычислено посредством использования передаточной функции так, что вертикальное ускорение пантографа 31 в точке отклонения контактного провода 4 (входная точка Pw) может быть вычислено с высокой точностью.
Хотя передаточная функция вычисляется посредством обнаружения положения пантографа 31 на изображении, сравнивая с моделью для сопоставления образца в данном варианте воплощения, данное изобретение может быть применимо к другим способам обнаружения положения пантографа в изображении. Например, данное изобретение может быть применено к способу, раскрытому в нерассмотренной патентной публикации Японии № 2006-250774. Хотя в части 2 обработки изображения в данном варианте воплощения обеспечена часть 22 записи изображения, как описано выше, оно также применимо для немедленной обработки изображения, сфотографированного камерой 1 с линейным датчиком, чтобы обнаружить траекторию 11 пантографа и вывести вертикальное ускорение пантографа в реальном времени. Приемлемы различные изменения в пределах сущности данного изобретения.
Вариант воплощения 2
Второй вариант воплощения данного изобретения будет описан со ссылкой на фиг.6. Фиг.6 показывает схематичное строение второго варианта воплощения устройства для измерения вертикального ускорения пантографа посредством обработки изображения согласно данному изобретению.
В данном варианте воплощения, как показано на фиг.6, камера 1 с линейным датчиком, описанная в первом варианте воплощения, обеспечена на платформе 5 камеры. Центральная часть пантографа 31 обычно окрашена в черный цвет железными порошками, потому что центральная часть скользит по контактному проводу. Если измерением управляют ночью, трудно распознать пантограф на черном фоне. Поэтому может произойти неправильное обнаружение.
Во втором варианте воплощения, хотя фактическое изображение наблюдается камерой 1 с линейным датчиком, направление камеры 1 с линейным датчиком, установленной на платформе камеры, регулируемо так, чтобы записывать отчетливое изображение пантографа 31, как, например, рога 31a пантографа 31. Строение второго варианта воплощения почти идентично строению, показанному на фиг.1 и фиг.3. Поэтому те же компоненты, соответствующие компонентам, описанным в первом варианте воплощения, пронумерованы теми же номерами, что и в первом варианте воплощения, и их описание опущено.
В соответствии со вторым вариантом воплощения устройства измерения вертикального ускорения пантографа посредством обработки изображений траектория пантографа 31 заведомо обнаруживается так, что вертикальное ускорение пантографа 31 в отклоненном положении контактного провода 4 (входная точка Pw) может быть измерено с высокой точностью в дополнение к эффекту, полученному в первом варианте воплощения.
Полезность в промышленности
Данное изобретение применимо к устройству и способу измерения вертикального ускорения пантографа посредством обработки изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КОНТАКТНОГО УСИЛИЯ И УСТРОЙСТВО ИЗМЕРЕНИЯ КОНТАКТНОГО УСИЛИЯ | 2011 |
|
RU2519589C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОНТАКТНОГО УСИЛИЯ И СПОСОБ ИЗМЕРЕНИЯ КОНТАКТНОГО УСИЛИЯ | 2010 |
|
RU2477229C1 |
| ВАГОН-ЛАБОРАТОРИЯ ИСПЫТАНИЙ КОНТАКТНОЙ СЕТИ | 2023 |
|
RU2806925C1 |
| ОПТИЧЕСКИЙ ТАКТИЛЬНЫЙ ДАТЧИК И СПОСОБ ВОССТАНОВЛЕНИЯ РАСПРЕДЕЛЕНИЯ ВЕКТОРА СИЛЫ С ИСПОЛЬЗОВАНИЕМ УКАЗАННОГО ДАТЧИКА | 2004 |
|
RU2358247C2 |
| ОПТИЧЕСКИЙ ТАКТИЛЬНЫЙ ДАТЧИК | 2005 |
|
RU2371686C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕКТОРА СИЛЫ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКОГО ТАКТИЛЬНОГО ДАТЧИКА | 2004 |
|
RU2354943C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВЫСОТЫ ПАНТОГРАФА | 2010 |
|
RU2478489C1 |
| УСТРОЙСТВО ФОТОСЪЕМКИ ТОКОПРИЕМНИКА ПОСРЕДСТВОМ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2491182C2 |
| ОБНАРУЖЕНИЕ НАПРАВЛЕНИЯ СЛАБОУСТОЙЧИВОГО КОРОТКОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ СРЕДНЕГО НАПРЯЖЕНИЯ С ПОМОЩЬЮ ЛИНЕЙНОЙ КОРРЕЛЯЦИИ | 2013 |
|
RU2631025C2 |
| Способ определения траектории объекта в окружающем пространстве для построения 3D карты | 2024 |
|
RU2830723C1 |

Изобретение относится к электрооборудованию транспортных средств и предназначено для измерения вертикального ускорения пантографа посредством фотографирования изображения пантографа камерой (1) с линейным датчиком, установленной на кузове транспортного средства. Вертикальное ускорение пантографа вычисляют в части (2) обработки изображения, снятого камерой (1). Часть (2) обработки изображения содержит часть (21) ввода изображения пантографа, сфотографированного камерой (1) с линейным датчиком в точке замера пантографа, часть (23) обнаружения положения пантографа, отображаемого камерой (1), и часть (24) измерения вертикального ускорения пантографа в точке для контакта пантографа с контактным проводом, основанного на одной или более ранее полученных передаточных функциях и смещении пантографа. Изобретение позволяет повысить компактность устройства. 2 н. и 3 з.п. ф-лы, 6 ил.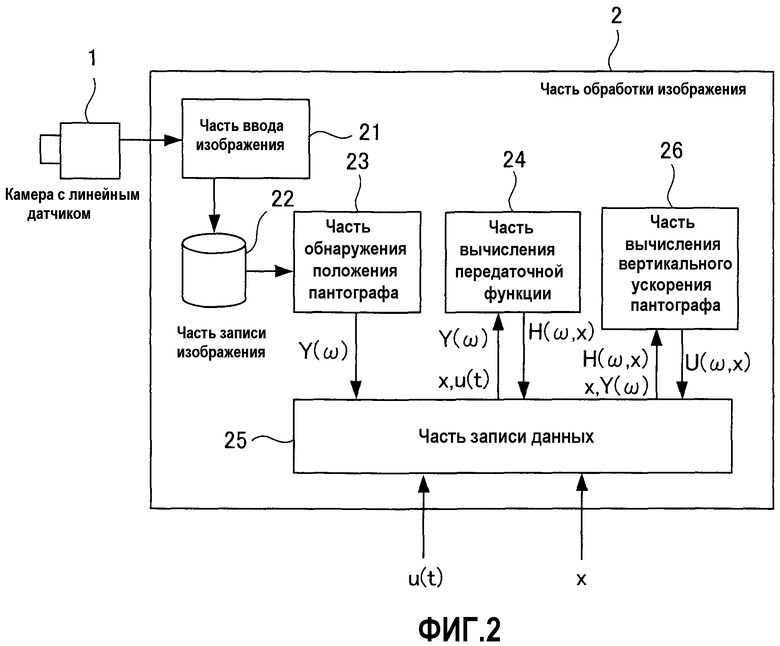
1. Устройство измерения вертикального ускорения пантографа посредством обработки изображения пантографа, сфотографированного камерой с линейным датчиком, установленной на кузове транспортного средства, в части обработки изображения, отличающееся тем, что упомянутая часть обработки изображения содержит:
средство ввода изображения для ввода изображения пантографа, сфотографированного в точке замера упомянутой камерой с линейным датчиком;
средство обнаружения положения пантографа для обнаружения положения упомянутого пантографа в упомянутом изображении, записанном в упомянутой камере с линейным датчиком, посредством обработки упомянутого изображения; и средство вычисления ускорения пантографа для вычисления вертикального ускорения упомянутого пантографа в точке контакта с контактным проводом в соответствии с положением упомянутого пантографа в упомянутом изображении линейного датчика, одной или более ранее обнаруженными передаточными функциями и отклоненным положением упомянутого пантографа.
2. Устройство измерения вертикального ускорения пантографа посредством обработки изображения пантографа по п.1, отличающееся тем, что упомянутая часть обработки изображения содержит средство вычисления передаточной функции для вычисления упомянутой передаточной функции в соответствии с вертикальным ускорением упомянутого пантографа, обнаруженным по положению упомянутого пантографа в упомянутом изображении линейного датчика в момент, когда вертикальная сила вибрации вертикально приложена к упомянутому пантографу в одной или более точек вибрации, и вертикальным ускорением упомянутого пантографа в упомянутых точках вибрации.
3. Устройство измерения вертикального ускорения пантографа посредством обработки упомянутого изображения по п.1, отличающееся тем, что упомянутая камера с линейным датчиком установлена на платформе камеры, и направление фотографирования упомянутой камеры с линейным датчиком регулируемо.
4. Способ измерения вертикального ускорения пантографа посредством обработки изображения пантографа, сфотографированного камерой с линейным датчиком, установленной на кузове транспортного средства, в части обработки изображения, отличающийся тем, что упомянутая часть обработки изображения содержит:
ввод данных изображения из упомянутой камеры с линейным датчиком;
обнаружение положения пантографа в точке замера в упомянутом изображении линейного датчика посредством сравнения с упомянутым изображением линейного датчика, сформированным упомянутыми введенными данными изображения, и с ранее сохраненной моделью сопоставления образца;
вычисление вертикального ускорения упомянутого пантографа в точке для контакта с упомянутым контактным проводов в соответствии с упомянутым вертикальным ускорением, обнаруженным по упомянутому положению упомянутого пантографа в упомянутом изображении линейного датчика, и одной или более ранее обнаруженными передаточными функциями.
5. Способ измерения вертикального ускорения пантографа по п.4, отличающийся тем, что вертикальная вибрация приложена к одной или более входным точкам на упомянутом пантографе одновременно с фотографированием упомянутого пантографа в упомянутой точке замера так, что упомянутые передаточные функции вычисляются на основе упомянутого вертикального ускорения упомянутого пантографа в упомянутой входной точке и вертикального ускорения упомянутого пантографа в упомянутой точке замера в упомянутом изображении линейного датчика, сформированном сфотографированными изображениями.
| JP 2006250774 А, 21.09.2006 | |||
| JP 2002279409 A, 27.09.2002 | |||
| JP 2003341389 A, 03.12.2003 | |||
| JP 2003156397 A, 30.05.2003 | |||
| JP 2008185457 A, 14.08.2008 | |||
| JP 2008104312 A, 01.05.2008 | |||
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНТАКТНОГО ПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2134203C1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕРА И РЕГИСТРАЦИИ ИЗНОСА КОНТАКТНОГО ПРОВОДА | 1997 |
|
RU2120866C1 |

