ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
По данной заявке испрашивается приоритет по поданной ранее предварительной заявке, озаглавленной "Система и способ автоматической калибровки отслеживаемого ультразвука", Sheng Xu и др. №60/987809, поданной 14 ноября 2007 г., заявителем которой является заявитель настоящего изобретения.
Настоящие варианты исполнения относятся в общем случае к медицинским системам и, более конкретно, - к способам и аппаратам для автоматической калибровки отслеживаемого ультразвука.
Ультразвуковые следящие зонды с пространственными локализаторами имеют применение в хирургической и интервенционной навигации, например, для слияния прямого ультразвукового изображения с изображениями, полученными другими способами. Калибровка отслеживаемого ультразвука, то есть определение пространственного соотношения между "прямым" ультразвуковым изображением и прикрепленным пространственным следящим устройством необходима, чтобы проведение этих операций было возможно. Многие традиционные способы калибровки являются длительными по времени, поскольку в них требуется вмешательство человека для определения контрольных точек в ультразвуковых изображениях. В этих "ручных" способах трудно достичь высокой точности, поскольку это потребовало бы получения большого количества контрольных точек "вручную". И хотя некоторые недавние способы калибровки могут выполнять калибровку автоматически, их недостаток заключается в том, что они основаны на сложных воображаемых заключениях.
Использование ультразвука в хирургической навигации требует отслеживания преобразователя в общей координатной системе. Обычно к ультразвуковому преобразователю прикрепляется оптический или электромагнитный датчик слежения, позволяющий отслеживать положение и ориентацию преобразователя. Ультразвуковая калибровка означает процедуру для определения фиксированного преобразования между ультразвуковыми изображениями и следящим устройством или датчиком, прикрепленным к ультразвуковому преобразователю.
Таким образом, в соответствующей области техники есть необходимость в улучшенном способе и системе для преодоления существующих проблем.
Фиг.1 представляет собой частичную блок-схему системы для автоматической калибровки отслеживаемого ультразвука в соответствии с вариантом исполнения настоящего изобретения.
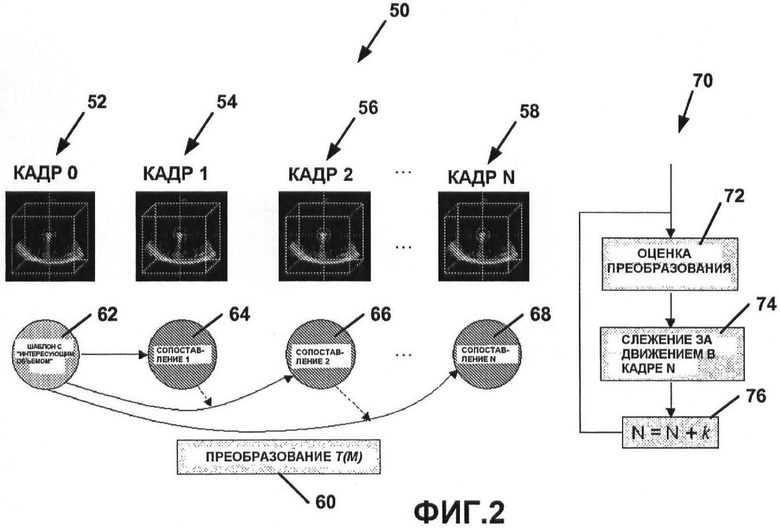
Фиг.2 представляет собой упрощенную условную схему и блок-схему, иллюстрирующую способ автоматической калибровки отслеживаемого ультразвука в соответствии с вариантом исполнения настоящего изобретения.
Фиг.3 представляет собой изображения на экране дисплея, иллюстрирующие мультипланарную реконструкцию изображений ультразвукового объема, полученных слежением на основе изображения в соответствии с другим вариантом исполнения настоящего изобретения.
На фигурах одинаковые ссылочные позиции относятся к одним и тем же элементам. Кроме того, следует заметить, что фигуры могут быть изображены не в масштабе.
Как уже отмечалось, калибровка отслеживаемого ультразвука означает определение пространственного соотношения между "прямым" ультразвуковым изображением и прикрепленным пространственным следящим устройством. Другими словами, ультразвуковая калибровка означает процедуру для определения фиксированного преобразования между ультразвуковыми изображениями и прикрепленным следящим устройством. В ответ на существующие в соответствующей области техники проблемы варианты исполнения по настоящему описанию предлагают способ для полностью автоматической калибровки отслеживаемого ультразвука.
Фиг.1 представляет собой частичную блок-схему ультразвуковой системы 10 формирования изображения, предназначенной для выполнения автоматической калибровки отслеживаемого ультразвука в соответствии с вариантом исполнения настоящего изобретения. Ультразвуковая система 10 формирования изображения содержит ультразвуковой преобразователь 12, следящее устройство 14, связанное с ультразвуковым преобразователем, локализатор (обозначенный в общем ссылочной позицией 16), калибровочный элемент 18, контейнер 20 и системный контроллер 22. Следящее устройство 14 связано с ультразвуковым зондом 12 в данном положении и в данной ориентации относительно поверхности 24 испускания энергии ультразвукового преобразователя 12. Ультразвуковой преобразователь или зонд 12 может включать в себя любой подходящий ручной ультразвуковой преобразователь или зонд, который может быть сконфигурирован для реализации вариантов исполнения настоящего изобретения при выполнении требований данного применения, связанного с формированием ультразвукового изображения. Ультразвуковой зонд 12 включает в себя ультразвуковой преобразователь (не показан), расположенный внутри своего корпуса, проксимальную поверхность 24 для испускания необходимой ультразвуковой энергии в поле изображения (обозначенное в общем ссылочной позицией 26). Различные цепи электрического питания и сигнальные цепи, все вместе представленные элементами, обозначенными ссылочной позицией 28, соединяют должным образом ультразвуковой зонд 12, следящее устройство 14 и системный контроллер 22, например, для выполнения описанных здесь различных функций и этапов.
Калибровочный элемент 18 устроен таким образом, что является по меньшей мере частично погруженным внутри объема жидкости, геля либо иной жидкообразной субстанции (которая обозначена в общем ссылочной позицией 30) в различных положениях и ориентации в соответствии с конкретными требованиями по калибровке отслеживаемого ультразвука. Объем жидкости, геля либо иной жидкообразной субстанции 30 заключен в соответствующем контейнере или резервуаре 20. Этот контейнер или резервуар 20 включает в себя по меньшей мере одну поверхность 32, подходящую для пропускания ультразвуковой энергии в ответ на энергию, излучаемую ультразвуковым преобразователем, а поверхность 24 ультразвукового зонда 12 находится в контакте с поверхностью 32.
Локализатор 16 включает в себя генератор 34 слежения, при этом генератор 34 слежения сконфигурирован с возможностью испускания энергии слежения, используемой совместно со следящим устройством 14 и с калибровочным элементом 18. В одном варианте исполнения генератор 34 слежения включает в себя генератор электромагнитного поля, причем этот генератор привязан к фиксированной ориентации и положению, как показано ссылочной позицией 36. Генератор 34 электромагнитного поля генерирует электромагнитное поле в «области интереса», называемой также заданным пространством локализатора или интересующим объемом, который в общем обозначен ссылочной позицией 38.
Системный контроллер 22 может содержать любой подходящий компьютер и/или интерфейс ультразвукового преобразователя, причем этот контроллер дополнительно программируется соответствующими инструкциями для выполнения различных функций, как описано далее относительно выполнения автоматической калибровки отслеживаемого ультразвука. Системный контроллер 22 может включать в себя различные сигнальные цепи входа-выхода, такие как 40 и 42, например, чтобы быть связанным электронным образом (i) с другими элементами ультразвуковой системы 10 формирования изображения или (ii) с одним или несколькими удаленными компьютерными системами вне этой ультразвуковой системы 10 формирования изображения. К системному контроллеру 22 подсоединено соответствующее дисплейное устройство 44, например, для использования его системным оператором во время проведения данной автоматической калибровки отслеживаемого ультразвука. Кроме того, по мере необходимости для использования во время выполнения какого-либо одного или нескольких этапов процедуры автоматической калибровки отслеживаемого ультразвука могут присутствовать дополнительные устройства, такие как устройства входа-выхода, позиционирующие устройства и т.д. (не показаны). Дополнительно, с системным контроллером 22 может быть связано средство 46 для получения изображения из запоминающего устройства (например, из памяти или из запоминающего устройства, содержащего изображения, полученные ранее в заданном режиме работы) или средство для получения изображения в реальном времени (например, изображений, получаемых в реальном времени от устройства формирования изображений в заданном режиме).
В одном варианте исполнения настоящего изобретения способ ультразвуковой калибровки включает в себя решение задачи точечной регистрации, при которой координаты P I ультразвукового изображения общего набора точек приписываются соответствующим координатам P L в пространстве локализатора. Фиг.1 содержит иллюстрации различных координатных систем, используемых для проведения автоматической калибровки отслеживаемого ультразвука в том виде, как она представлена здесь, включая координатную систему L для пространства локализатора, координатную систему Т для пространства следящего устройства и координатную систему I для пространства ультразвукового изображения. Далее, как показано на фиг.1, может быть выполнено общее преобразование, выраженное произведением матриц гомогенного преобразования, что выражается формулой
P L = L F T · T F I ·P I , (1)
где P L и P I - координаты контрольной точки в координатных системах пространства локализатора и пространства ультразвукового изображения соответственно. Термин L F T представляет собой результат отслеживания в реальном времени локализатором следящего устройства, укрепленного на ультразвуковом преобразователе в момент идентификации контрольной точки в ультразвуковом изображении. Термин T F I представляет собой фиксированное преобразование между следящим устройством и изображением. При наличии достаточного количества контрольных точек (N≥3) T F I может быть решен с использованием сингулярной декомпозиции (SVD).
Тем не менее, многие традиционные подходы к ультразвуковой калибровке требуют вмешательства человека для идентификации координат контрольных точек в изображении. "Ручная процедура" является длительной по времени, что, к сожалению, может привести к возникновению проблем, связанных с коммерциализацией ультразвуковой системы наведения. Кроме того, точная ультразвуковая калибровка может потребовать большого количества контрольных точек. Поэтому существует высокая потребность в полностью автоматическом подходе к калибровке. Кроме того, хотя некоторые недавние подходы к калибровке реализовали полностью автоматическую калибровку, такие подходы к калибровке имеют тот недостаток, что основаны на сложных воображаемых заключениях. В соответствии с вариантами исполнения настоящего изобретения данный способ ультразвуковой калибровки включает в себя использование алгоритма обработки изображения, совмещенного с процедурой калибровки. В результате для достижения полностью автоматической процедуры ультразвуковой калибровки не требуется ни вмешательства человека, ни дополнительной сложной аппаратуры.
В одном варианте исполнения в соответствии с настоящим изобретением для определения местонахождения некоторого количества наборов контрольных точек в пространстве ультразвукового изображения способ ультразвуковой калибровки включает в себя использование алгоритма обработки изображения. В результате, для выполнения ультразвуковой калибровки может быть использовано неограниченное количество контрольных точек, позволяя тем самым достичь высокой точности калибровки. Кроме того, система, реализующая данный способ ультразвуковой калибровки, является простой и дешевой. Наконец, эта ультразвуковая калибровка является быстрой и выполняется автоматически (то есть без "ручного" определения контрольных точек).
Хотя варианты исполнения описаны здесь применительно к трехмерной ультразвуковой калибровке, эти варианты исполнения могут быть использованы также и для двухмерной ультразвуковой калибровки. Дополнительно, в соответствии с другим вариантом исполнения (двухмерные или трехмерные) ультразвуковые изображения могут быть переданы в реальном времени - с использованием соответствующей техники передачи видеоизображения - на компьютер, отдельный от системы формирования ультразвуковых диагностических изображений, для выполнения одной или нескольких частей процедуры ультразвуковой калибровки. Далее, если ультразвуковые изображения являются двухмерными, то изображения могут быть получены покадровым захватом изображений, содержащихся в выходном видеосигнале ультразвукового сканера или системного контроллера 22 ультразвуковой диагностической системы 10 формирования изображения.
В соответствии с одним вариантом исполнения в резервуар 20 геля или воды 30 погружен по меньшей мере кончик 19 отслеживаемой иглы 18. На ультразвуковом преобразователе 12 закреплено следящее устройство 14 с шестью степенями свободы (6 DOF), что позволяет внешнему локализатору 16 отслеживать положение и ориентацию преобразователя. Аналогично, следящее устройство оснащено иглой 18, например, использующей миниатюрный датчик, встроенный в ее кончик 19. Эта игла, в частности, по меньшей мере, кончик 19 иглы, который содержит миниатюрный датчик, перемещается внутри резервуара относительно преобразователя, в результате чего положение кончика иглы в ультразвуковом объеме изменяется. После движения иглы внутри объема из предыдущего положения в новое положение производится обработка ультразвукового кадра ультразвукового объема для определения нового положения иглы на изображении. Кроме того, во время этой процедуры локализатор 16 следит (i) и за иглой, (ii) и за следящим устройством ультразвукового преобразователя.
Способ автоматической ультразвуковой калибровки дополнительно включает в себя использование регистрации изображения для идентификации кончика иглы в ультразвуковом объеме. На фиг.2 иллюстрируется пример алгоритмов 50 обработки изображения, в каждом из которых производится сопоставление шаблона кончика 19 иглы с текущим изображением кончика иглы с соответствующим ультразвуковым кадром (52, 54, 56 и 58). Количество кадров содержит N≥3. Для начального кадра 52 устанавливается шаблон 62 с "интересующим объемом" (VOI). Алгоритм обработки изображения переходит к следующему кадру 54 и использует обработку изображения для сопоставления шаблона кончика иглы (из кадра 52) с изображением кадра 54, соответствующего сопоставлению 1, обозначенному ссылочной позицией 64. Этот процесс продолжается с кадром 56, где используется обработка изображения для сопоставления шаблона кончика иглы (из начального кадра 52 и кадра 54) с изображением кадра 56, соответствующего сопоставлению 2, обозначенному ссылочной позицией 66. Подобным же образом этот процесс продолжается с кадром 58, где используется обработка изображения для сопоставления шаблона кончика иглы (из начального кадра 52, кадра 54 и кадра 56, а также любого дополнительного следующего кадра) с изображением кадра 58, соответствующего сопоставлению N, обозначенному ссылочной позицией 68.
Дополнительно может быть смоделировано движение иглы - параметрическим преобразованием, таким как чистое преобразование, твердотельное преобразование или аффинное преобразование и т.д. Например, если игла перемещается вручную, то для моделирования переноса, вращения и искусственных изменений положения иглы в ультразвуковом изображении может быть использовано твердотельное или аффинное преобразование. Если для перемещения иглы имеется робот с тремя перемещающими сочленениями, то для увеличения определенности и точности алгоритма слежения за движением следует использовать трансляционную модель. В предположении, что движение иглы непрерывно, параметры движения одного ультразвукового кадра могут быть использованы для оценки движения в следующем кадре. Задача локальной регистрации изображения решена в каждом отдельном кадре с использованием способа цифровой оптимизации (метод Гаусса-Ньютона). Алгоритм слежения является быстрым и может выполняться в реальном времени. Среднее время обработки в одном варианте исполнения составляет порядка 35 мс на кадр (или 28,6 Гц) с использованием рабочей станции с частотой 3,2 ГГц, имеющей двухгигабайтное (2 Гб) оперативное запоминающее устройство (RAM). Подробности одного из примеров подходящего алгоритма слежения за перемещением можно найти в документе: S. Xu, J. Kruecker, S. Settlemier and B.J. Wood, "Real-time motion tracking using 3D ultrasound" Proc. SRIE Vol. 6509, 65090X (21 Марта, 2007).
Фиг.2, далее, показывает преобразование Т(μ), обозначенное ссылочной позицией 60, а также упрощенную схему 70 для выполнения оценки преобразования (шаг 72), выполнения слежения за движением в данном кадре N (шаг 74), прибавления величины N к следующей величине N+k при k≥1 (шаг 76) и повторения процесса с шага 72. Результат слежения в данном кадре N используется для оценки движения в кадре N+k, например, используя подходящий алгоритм слежения за движением. Цикл повторяет сам себя до тех пор, пока не будет зарегистрировано нужное количество кадров друг с другом.
На фиг.3 показаны мгновенные снимки 80 экранов дисплея в одном варианте исполнения программного обеспечения, производящего слежение за кончиком иглы. Три вида изображения (82, 84 и 86) представляют собой мультипланарную реконструкцию ультразвукового объема. Вид 82 представляет собой мультипланарную реконструкцию ультразвукового объема для сечения XY данного кадра. Вид 84 представляет собой мультипланарную реконструкцию ультразвукового объема для сечения ZY данного кадра. Вид 86 представляет собой мультипланарную реконструкцию ультразвукового объема для сечения XZ данного кадра. На всех трех видах кончик иглы автоматически идентифицирован с использованием описанного здесь сопоставления с шаблоном, а также техники обработки изображения и выведен на экран дисплея. В отношении различных видов изображения и в связи с неподвижной координатной системой относительно пациента, этим видам изображения можно присваивать различные обозначения. Например, обозначение L может обозначать "левый", R может обозначать "правый", F может обозначать "нога", Н может обозначать "голова" и т.д. Для обозначения соответствия между различными видами изображений или частями видов можно использовать перекрестие, что обычно используется при рассматривании трехмерных изображений. Нижний правый вид (или окно) 88 показывает остаточную погрешность сопоставления с шаблоном каждого ультразвукового кадра (в серии кадров). На виде 88 фиг.3 остаточная погрешность слежения за текущим движением, как было определено, составляет 17,5 от ее величины. Величина определяет точность слежения за движением, которая может быть использована в процедуре калибровки во избежание включения кадров с результатами слежения, которые выходят за приемлемый диапазон (то есть соответствующие результатам неточного слежения).
Дополнительно, что касается использования обозначений в уравнении (1): P I есть положение кончика иглы при слежении на основе изображения, а P L - при слежении локализатором. Для каждого кадра ультразвукового изображения одна такая пара точек может быть вычислена автоматически, что позволяет производить захват сотен или тысяч пар точек и что приводит к достижению значительно более высокой точности по сравнению с ручным методом. При ручной идентификации P I в каждом захваченном кадре количество точек, как правило, ограничено диапазоном 10-50. Экономия времени на каждую пару точек составляет порядка коэффициента 1000, так как точная ручная идентификация кончика иглы в трехмерном режиме требует порядка 30-60 секунд.
В соответствии с другим вариантом исполнения, хотя способ ультразвуковой калибровки был описан применительно к трехмерной ультразвуковой калибровке, этот способ также приемлем для двухмерной ультразвуковой калибровки. При двухмерной ультразвуковой калибровке этот способ дополнительно включает в себя ограничение движения иглы плоскостью изображения двухмерного ультразвукового преобразователя, например, с использованием направляющей иглы или других подходящих способов ограничения движения иглы в плоскости изображения.
В соответствии с другим вариантом исполнения алгоритм, основанный на изображении, определяет относительное движение иглы и преобразователя. В этом варианте исполнения игла находится в фиксированном положении, а ультразвуковой преобразователь относительно этой иглы движется.
В соответствии с еще одним вариантом исполнения вместо иглы может быть использован любой инструмент, пригодный для создания устойчивых элементов в ультразвуковом изображении. Дополнительно, в еще одном варианте исполнения алгоритм обработки изображения определяет положение устойчивого элемента сегментацией этого элемента на соответствующие ультразвуковые изображения. Сегментация изображения означает процесс разделения цифрового изображения на многочисленные области (или наборы пикселей). Вообще говоря, одна область соответствует одному объекту. Примеры подходящих инструментов могут включать сферу, куб или что-либо еще, местонахождение чего может быть точно определено в ультразвуковых изображениях.
Кроме того, алгоритм обработки изображения может следить как за движением ткани, так и за движением инструмента. Этот вариант исполнения настоящего изобретения может быть применим к области хирургии, "направляемой" изображением, особенно к хирургическим вмешательствам, которые требуют наведения, а также слияния ультразвуковых изображений.
Теперь обратим внимание на то, что способ автоматической калибровки отслеживаемого ультразвука включает конфигурирование локализатора (i) для слежения за положением и ориентацией ультразвукового преобразователя внутри пространства локализатора и (ii) для слежения за положением и ориентацией калибровочного элемента внутри пространства локализатора. Обеспечивается ультразвуковой объем, подходящий для пропускания ультразвука, при этом ультразвуковой объем расположен внутри пространства локализатора. Калибровочный элемент расположен внутри ультразвукового объема, и производится получение серии ультразвуковых изображений ультразвукового объема ультразвуковым зондом, поскольку относительное положение и ориентация ультразвукового преобразователя и калибровочного элемента изменяется. Этот способ использует обработку изображения для определения положения на основе изображения и ориентации калибровочного элемента внутри каждого кадра из серии ультразвуковых изображений. Способ дополнительно включает вычисление параметров преобразования калибровки отслеживаемого ультразвука в зависимости (i) от положения на основе изображения и ориентации калибровочного элемента в серии ультразвуковых изображений, (ii) от соответствующего положения и ориентации отслеживаемого локализатором ультразвукового преобразователя для каждого выбранного кадра из серии ультразвуковых изображений, и (iii) от соответствующего положения и ориентации отслеживаемого локализатором калибровочного элемента для каждого кадра из серии ультразвуковых изображений, при этом параметры преобразования пространственно соотносят координатное пространство локализатора к пространству ультразвукового изображения.
В соответствии с одним вариантом исполнения локализатор сконфигурирован (i) для отслеживания положения и ориентации ультразвукового преобразователя внутри пространства локализатора и (ii) для отслеживания положения и ориентации калибровочного элемента внутри пространства локализатора. В одном варианте исполнения ультразвуковой преобразователь включает в себя следящее устройство, связанное с преобразователем, при этом локализатор осуществляет слежение за следящим устройством внутри пространства локализатора. Дополнительно калибровочный элемент содержит любой инструмент, пригодный для создания по меньшей мере одного устойчивого элемента в ультразвуковом изображении. В другом варианте исполнения калибровочный элемент содержит иглу, и при этом обработка изображения определяет положение и ориентацию кончика этой иглы внутри каждого изображения в серии ультразвуковых изображений.
В другом варианте исполнения способ использует ультразвуковой объем, пригодный для пропускания ультразвука, причем ультразвуковой объем расположен внутри пространства локализатора. Этот ультразвуковой объем может включать в себя, например, резервуар, содержащий по меньшей мере что-то одно, выбранное из группы, состоящей из геля и воды.
Размещение калибровочного элемента внутри ультразвукового объема может включать в себя размещение калибровочного элемента в ультразвуковом объеме движением этого калибровочного элемента по ультразвуковому объему. В одном варианте исполнения движение калибровочного элемента включает в себя использование роботизированной руки, имеющей три перемещающих сочленения, предназначенной для перемещения этого калибровочного элемента по этому ультразвуковому объему.
В одном варианте исполнения способ включает этап получения серии ультразвуковых изображений ультразвукового объема ультразвуковым зондом по мере изменения относительного положения и ориентации ультразвукового преобразователя и калибровочного элемента, при этом серия ультразвуковых изображений включает в себя N кадров, где N больше или равно трем (N≥3). В одном варианте исполнения ультразвуковые изображения содержат трехмерные изображения. В другом варианте исполнения ультразвуковые изображения содержат двухмерные изображения, при этом способ дополнительно содержит ограничение движения калибровочного элемента по ультразвуковому объему в плоскости изображения этих двухмерных изображений. Например, ограничение движения включает использование направляющей, которая ограничивает движение плоскостью двухмерного изображения. В еще одном варианте исполнения относительное позиционирование и ориентация ультразвукового преобразователя и калибровочного элемента изменяется сохранением ультразвукового преобразователя неподвижным перемещении, в то же время перемещая калибровочный элемент по ультразвуковому объему.
В другом варианте исполнения использование обработки изображения для определения положения на основе изображения и ориентации калибровочного элемента внутри каждого кадра из серии ультразвуковых изображений может содержать определение положения на основе изображения и ориентации калибровочного элемента для каждого кадра обработкой ультразвукового изображения для определения положения изображения калибровочного элемента и ориентации изображения. Этот этап может дополнительно включать в себя этап, на котором определение положения изображения калибровочного элемента и ориентации изображения дополнительно включает сопоставление шаблона калибровочного элемента с текущим изображением этого калибровочного элемента в каждом кадре изображения из серии ультразвуковых изображений.
В еще одном варианте исполнения вычисление параметров преобразования калибровки ультразвукового отслеживаемого датчика содержит вычисление в зависимости (i) от положения на основе изображения и ориентации калибровочного элемента в серии ультразвуковых изображений, (ii) от соответствующего положения и ориентации отслеживаемого локализатором ультразвукового преобразователя для каждого кадра из серии ультразвуковых изображений, и (iii) от соответствующего положения и ориентации отслеживаемого локализатором калибровочного элемента для каждого кадра из серии ультразвуковых изображений, при этом параметры преобразования пространственно соотносят координатное пространство локализатора к пространству ультразвукового изображения. Вычисление может включать в себя решение для параметров преобразования с использованием сингулярной декомпозиции (SVD). Дополнительно вычисление может включать в себя автоматическое вычисление пары точек для каждого кадра ультразвукового изображения, при этом пара точек включает в себя (i) отслеживаемую на основе изображения точку P I идентифицируемого участка калибровочного элемента и (ii) отслеживаемую локализатором точку P L ультразвукового преобразователя. В другом варианте исполнения калибровочный элемент содержит иглу, а идентифицируемый участок иглы содержит кончик иглы.
В еще одном варианте исполнения движение калибровочного элемента сконфигурировано таким образом, что является непрерывным, а способ дополнительно содержит моделирование движения калибровочного элемента с помощью параметрического преобразования. В этом варианте исполнения параметры движения одного кадра ультразвукового изображения используются для оценки движения калибровочного элемента в следующем кадре ультразвукового изображения. Дополнительно, моделирование движения включает в себя решение задачи локальной регистрации изображения в каждом отдельном кадре ультразвукового изображения с использованием числовой оптимизации.
Дополнительно, варианты исполнения по настоящему изобретению включают в себя диагностическую ультразвуковую систему формирования изображения, сконфигурированную для выполнения автоматической калибровки отслеживаемого ультразвука в соответствии с раскрытыми здесь способами.
Не смотря на то, что выше подробно было описано лишь несколько примерных вариантов исполнения, специалисты в данной области техники легко заметят, что в эти примерные варианты исполнения может быть внесено множество изменений без отклонения по существу от составляющих новизну идей и преимуществ вариантов исполнения настоящего изобретения. Например, варианты исполнения по настоящему изобретению могут быть применимы в любом ультразвуковом сканере, встроенном в локализатор. Соответственно, предполагается, что все такие изменения включены в объем вариантов исполнения настоящего изобретения, как это определено в нижеследующей формуле изобретения. Предполагается, что в формуле изобретения выражения "средство плюс функция" относятся к описанным здесь конструкциям как выполняющие описанные функции и являются не только конструктивными эквивалентами, но также и эквивалентными конструкциями.
В добавление, каждая ссылочная позиция, указанная в скобках в одном или нескольких пунктах формулы изобретения, не должна рассматриваться как ограничение этих пунктов. Слова "содержащий", "содержит" и им подобные не исключают присутствия элементов или этапов, отличных от тех, которые перечислены в любом пункте или в описании в целом. Ссылка на какой-либо элемент в единственном числе не исключает ссылки на этот элемент во множественном числе и наоборот. Один или несколько вариантов исполнения могут быть реализованы посредством аппаратных средств, содержащих несколько отдельных элементов и/или посредством соответствующим образом запрограммированного компьютера. В пункте формулы изобретения, относящемся к устройству, где перечисляются несколько средств, несколько из этих средств могут быть реализованы одним и тем же наименованием аппаратуры. Простой факт, что некоторые показатели указаны во взаимно различных зависимых пунктах формулы изобретения не указывает на то, что для получения какого-либо преимущества не может быть использована комбинация этих показателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛУЧШЕННЫЙ СПОСОБ КАЛИБРОВКИ СИСТЕМЫ СЛЕЖЕНИЯ ЗА КАТЕТЕРОМ, ИСПОЛЬЗУЮЩЕЙ МЕДИЦИНСКИЕ ДАННЫЕ ОТОБРАЖЕНИЯ | 2007 |
|
RU2434579C2 |
| ИНТЕРВЕНЦИОННАЯ НАВИГАЦИЯ С ИСПОЛЬЗОВАНИЕМ ТРЕХМЕРНОГО УЛЬТРАЗВУКА С КОНТРАСТНЫМ УСИЛЕНИЕМ | 2008 |
|
RU2494676C2 |
| КОМБИНАЦИЯ УЛЬТРАЗВУКОВОЙ И РЕНТГЕНОВСКОЙ СИСТЕМ | 2010 |
|
RU2556783C2 |
| КАЛИБРОВОЧНОЕ ПРИСПОСОБЛЕНИЕ | 2013 |
|
RU2650037C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБЪЕДИНЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ В РЕАЛЬНОМ ВРЕМЕНИ С РАНЕЕ ПОЛУЧЕННЫМИ МЕДИЦИНСКИМИ ИЗОБРАЖЕНИЯМИ | 2007 |
|
RU2468436C2 |
| УЛЬТРАЗВУКОВАЯ ВИЗУАЛИЗАЦИЯ ВОЛН СДВИГА С ФОРМИРОВАНИЕМ СФОКУСИРОВАННЫХ ПУЧКОВ СКАНИРУЮЩИХ ЛИНИЙ | 2010 |
|
RU2552894C2 |
| СИСТЕМА И СПОСОБ АДАПТИВНОЙ АБЛЯЦИИ И ТЕРАПИИ НА ОСНОВАНИИ ЭЛАСТОГРАФИЧЕСКОГО МОНИТОРИНГА | 2016 |
|
RU2707037C2 |
| СИСТЕМА И СПОСОБ ЭЛАСТОГРАФИЧЕСКИХ ИЗМЕРЕНИЙ | 2014 |
|
RU2667617C2 |
| Система калибровки набора камер для задач оптического трекинга объектов в пространстве | 2023 |
|
RU2811363C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ МЕДИЦИНСКОГО УСТРОЙСТВА | 2016 |
|
RU2725061C2 |

Изобретение относится к способам и устройствам для автоматической калибровки отслеживаемого ультразвука. Система и способ со следящими ультразвуковыми преобразователями или зондами (12) с пространственными локализаторами (16) осуществляет автоматическую калибровку с минимальной добавкой аппаратуры к той, которая требовалась ранее существовавшим системам. Алгоритм слежения на основе изображения локализует имеющиеся в пространстве изображения (I) контрольные точки. После этого для выполнения ультразвуковой калибровки может быть использовано неограниченное количество точек, позволяя достичь высокой точности калибровки. Достигаемыми техническими результатами является то, что предложенная система (10) калибровки является простой и дешевой, а калибровка является быстрой и может проводиться автоматически. 2 н. и 13 з.п. ф-лы, 3 ил.
1. Способ автоматической калибровки отслеживаемого ультразвука, включающий в себя этапы, на которых:
конфигурируют локализатор (16) (i) для слежения за положением и ориентацией ультразвукового преобразователя (12) внутри пространства (38) локализатора и (ii) для слежения за положением и ориентацией калибровочного элемента (18) внутри пространства локализатора;
обеспечивают ультразвуковой объем (20), пригодный для пропускания ультразвука, причем ультразвуковой объем расположен внутри пространства локализатора;
размещают калибровочный элемент (18) внутри ультразвукового объема (20);
получают серию ультразвуковых изображений (52, 54, 56, 58) ультразвукового объема ультразвуковым зондом по мере изменения относительного положения и ориентации ультразвукового преобразователя (12) и калибровочного элемента (18);
применяют обработку (62, 64, 66, 68) изображения для определения на основе изображения положения и ориентации калибровочного элемента внутри каждого кадра из серии ультразвуковых изображений; и
вычисляют параметры преобразования калибровки отслеживаемого ультразвука в зависимости (i) от основанного на изображении положения и ориентации калибровочного элемента (18) в каждой из серий ультразвуковых изображений, (ii) от соответствующего положения и ориентации отслеживаемого локализатором ультразвукового преобразователя (12) для каждого выбранного кадра (52, 54, 56, 58) из серии ультразвуковых изображений, и (iii) от соответствующего положения и ориентации отслеживаемого локализатором калибровочного элемента (18) для каждого кадра из серии ультразвуковых изображений, при этом параметры преобразования пространственно соотносят координатное пространство (L) локализатора с пространством (I) ультразвукового изображения, при этом, дополнительно,
определение положения изображения калибровочного элемента и ориентации изображения включает (i) сопоставление шаблона (62, 64, 66, 68) начального представляющего интерес объема кадра, который включает в себя калибровочный элемент, с (ii) изображением калибровочного элемента в каждом последующем кадре из серии ультразвуковых изображений.
2. Способ по п.1, в котором ультразвуковой преобразователь (12) включает в себя следящее устройство (14), связанное с преобразователем, и в котором локализатор осуществляет слежение за следящим устройством, внутри пространства локализатора.
3. Способ по п.1, в котором калибровочный элемент (18) содержит любой инструмент, пригодный для создания, по меньшей мере, одного устойчивого элемента в ультразвуковом изображении.
4. Способ по п.3, в котором, дополнительно, калибровочный элемент (18) содержит иглу, и в котором обработка изображения определяет положение и ориентацию кончика (19) этой иглы внутри каждого изображения в серии ультразвуковых изображений.
5. Способ по п.1, в котором размещение калибровочного элемента (18) внутри ультразвукового объема (20) включает в себя движение этого калибровочного элемента по ультразвуковому объему.
6. Способ по п.5, в котором движение калибровочного элемента (18) дополнительно включает в себя использование роботизированной руки, имеющей три перемещающих сочленения для перемещения этого калибровочного элемента по этому ультразвуковому объему.
7. Способ по п.1, в котором серия ультразвуковых изображений включает в себя N кадров, где N больше или равно трем (N≥3).
8. Способ по п.1, в котором ультразвуковые изображения содержат трехмерные изображения.
9. Способ по п.1, в котором ультразвуковые изображения содержат двухмерные изображения, при этом способ дополнительно содержит этап, на котором:
ограничивают движение калибровочного элемента по ультразвуковому объему в плоскости изображения этих двухмерных изображений.
10. Способ по п.9, в котором, дополнительно, ограничение движения включает использование направляющей, которая ограничивает движение плоскостью двухмерного изображения.
11. Способ по п.1, в котором определение на основе изображения положения и ориентации калибровочного элемента (18) включает - для каждого кадра (52, 54, 56, 58) - обработку ультразвукового изображения для определения положения изображения калибровочного элемента и ориентации изображения.
12. Способ по п.1, в котором вычисление дополнительно включает автоматическое вычисление пары точек для каждого кадра ультразвукового изображения, при этом пара точек включает в себя (i) отслеживаемую на основе изображения точку PI идентифицируемого участка калибровочного элемента и (ii) отслеживаемую локализатором точку PL ультразвукового преобразователя.
13. Способ по п.1, в котором движение калибровочного элемента (18) является непрерывным, и способ дополнительно содержит этап, на котором:
моделируют движение калибровочного элемента с помощью параметрического преобразования, при этом параметры движения одного кадра ультразвукового изображения используют для оценки движения калибровочного элемента в следующем кадре ультразвукового изображения.
14. Способ по п.13, в котором моделирование движения включает решение задачи локальной регистрации изображения в каждом отдельном кадре ультразвукового изображения с использованием числовой оптимизации.
15. Диагностическая ультразвуковая система (10) формирования изображения, сконфигурированная для выполнения автоматической калибровки отслеживаемого ультразвука в соответствии со способом по п.1.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ULTRASOUND IN MEDICINE AND BIOLOGY, NEW YORK, NY, US, vol.27, no.11, 1 November 2001 (2001-11-01), pages 1557-1566 | |||
| СПОСОБ КАЛИБРОВКИ УЛЬТРАЗВУКОВОГО ПРЕОБРАЗОВАТЕЛЯ | 1995 |
|
RU2142211C1 |
| RU 95109252 A1, 10.05.1997 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ СТРУКТУР И СОСУДОВ ГОЛОВНОГО МОЗГА | 2002 |
|
RU2232547C2 |
| US 5255680 A, 26.10.1993 | |||
| JP 11319106 A, 24.11.1999. | |||

