Область техники, к которой относится изобретение
Это раскрытие относится к абляционным системам, способам и устройствам, и более конкретно к эластографическим измерениям для оптимизации абляции в медицинских применениях.
Уровень техники
Способы тепловой абляции предоставляют превосходную альтернативу для обширного оперативного вмешательства, которое может влечь риск, даже у самого опытного хирурга. Эти способы являются минимально инвазивными и требуют только игл (например, радиочастотная (RF), криотерапия и микроволновая абляция) или неинвазивного источника тепла, например, с использованием фокусированного ультразвука высокой интенсивности (HIFU). В большинстве процедур злокачественную ткань нагревают выше 60°C и коагулируют.
Радиочастотная абляция (RFA) в настоящее время представляет собой единственную одобренную FDA минимально инвазивную нагревательную терапию в Соединенных Штатах. В ней используют зонд с активным электродным кончиком, через который пропускают переменный электрический ток 460-500 кГц. Ток распространяется через тело к площадкам для заземления, помещенным на спине или бедре пациента. Ток вызывает ионное возбуждение и фрикционный нагрев. Затем происходит рассеивание тепла через теплопроводность для того, чтобы выполнять абляцию опухоли.
RFA часто используют для лечения злокачественной опухоли печени. В существующих протоколах лечения используют упрощенный сферический абляционный объем, предсказываемый по описаниям производителей устройств. Фактические объемы лечения значительно отклоняются от этого предсказания, что ведет к высоким частотам рецидивов (приблизительно 35%).
RFA типично осуществляют при сопровождении ультразвуковой, компьютерно-томографической (CT) или магнитно-резонансной визуализации (MRI). Одна общая причина для высоких частот рецидивов состоит в неспособности осуществлять мониторинг и контроль размера абляции, чтобы в достаточной мере убивать опухолевые клетки. Обратную связь в реальном времени для клинициста в настоящее время можно осуществлять с обоснованной точностью с использованием визуализации температур на основе магнитного резонанса (MR). Однако магнитно-резонансная визуализация (MRI) является дорогостоящей и может не быть легко доступной. Ультразвук представляет собой другую модальность, которую широко используют для визуального сопровождения во время размещения иглы. Однако в настоящее время единственный путь, используемый для мониторинга лечения, опосредован визуализацией гиперэхогенных повреждений на изображении в B-режиме. В большинстве случаев гиперэхогенность обусловлена формированием микропузырьков во время RFA, что является временным эффектом и слабо коррелирует с границами повреждения. Следовательно, такая визуализация является только приблизительной, а не хорошим индикатором эффекта лечения.
Раскрытие изобретения
В соответствии с данными принципами, система для осуществления абляции содержит абляционное устройство, выполненное с возможностью выполнять абляцию ткани в соответствии с параметрами управления и выполненное с возможностью выполнять измерения во время процесса абляции. Система визуализации выполнена с возможностью измерять соответствующий эластографический параметр для того, чтобы осуществлять мониторинг прогресса абляции. Модуль оценки параметров и мониторинга выполнен с возможностью принимать измерения от абляционного устройства и/или соответствующий эластографический параметр для того, чтобы предоставлять обратную связь для того, чтобы адаптивно корректировать параметры визуализации устройства визуализации в различные моменты времени в течение процесса абляции.
Другая система для осуществления абляции содержит абляционное устройство, выполненное с возможностью выполнять абляцию ткани в соответствии с управляющим сигналом. Система визуализации выполнена с возможностью выполнять эластографические измерения. Модуль оценки параметров и мониторинга выполнен с возможностью принимать эластографические измерения в качестве обратной связи от устройства визуализации и корректировать управляющий сигнал для того, чтобы управлять абляционным устройством, чтобы достигать терапевтические цели, на основании эластографических измерений.
Способ абляции включает расположение абляционного устройства и ультразвукового зонда в субъекте для того, чтобы начинать абляцию; генерацию информации об измерениях в качестве обратной связи во время процесса абляции, включая соответствующий эластографический параметр, информация об измерениях содержит информацию от по меньшей мере одного из абляционного устройства и ультразвукового сканера; адаптивное обновление по меньшей мере одного из параметров визуализации ультразвукового сканера и/или управляющего сигнала абляционного устройства в соответствии с обратной связью; и завершение процесса абляции, когда достигают цель лечения.
Эти и другие цели, признаки и преимущества по настоящему раскрытию будут видны из следующего подробного описания его иллюстративных вариантов осуществления, которое следует читать совместно с сопроводительными рисунками.
Краткое описание чертежей
В этом раскрытии подробно представлено следующее описание предпочтительных вариантов осуществления со ссылкой на следующие фигуры, на которых:
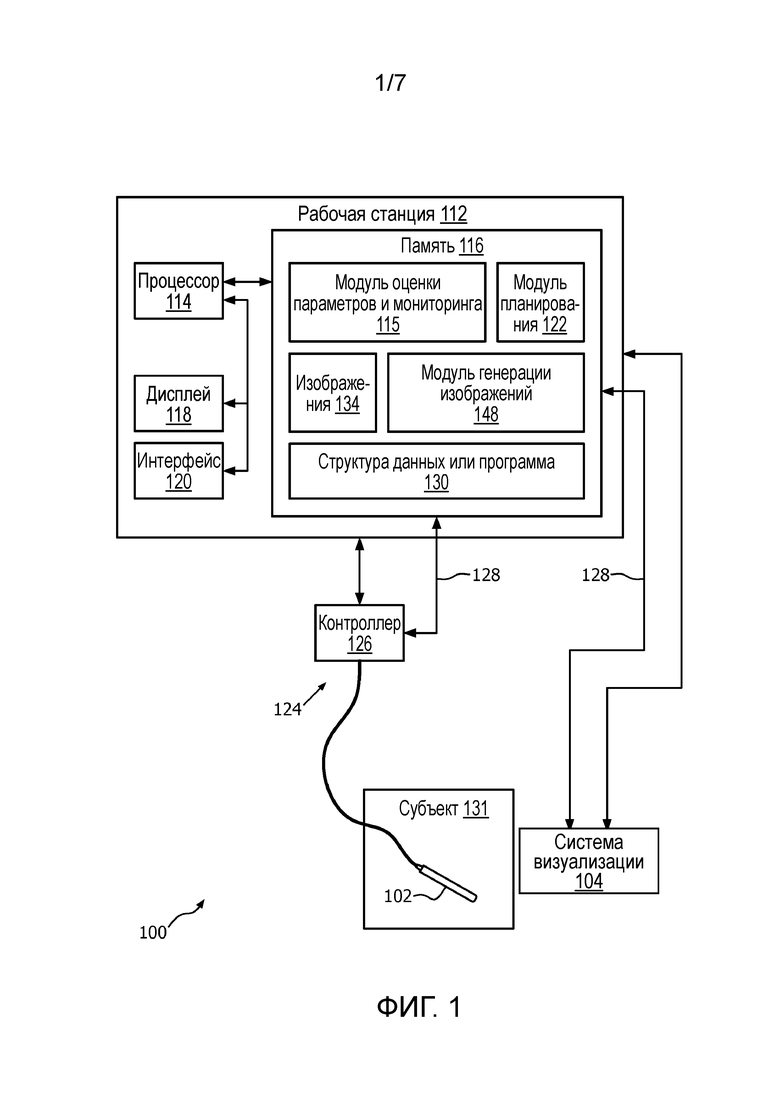
на фиг. 1 представлена блочная/потоковая диаграмма, показывающая систему для осуществления абляции в соответствии с полезными вариантами осуществления;
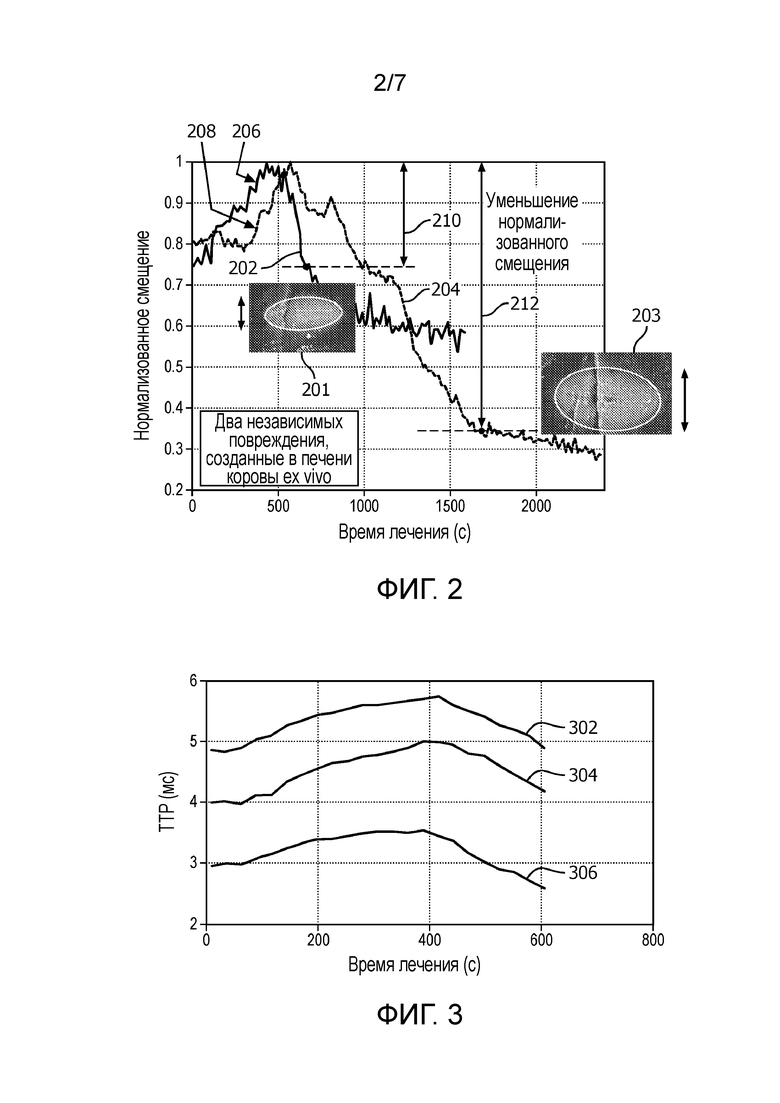
на фиг. 2 представлено построение графика нормализованного смещения в зависимости от времени лечения (сек.) для формирования двух повреждений в печенях коров, который показывает характеристики размягчения и твердения ткани после абляции;
на фиг. 3 представлено построение графика времени до пика (TTP) (мс) в зависимости от времени лечения (сек.) для трех повреждений в печенях коров, который показывает характеристики размягчения и твердения ткани после абляции;
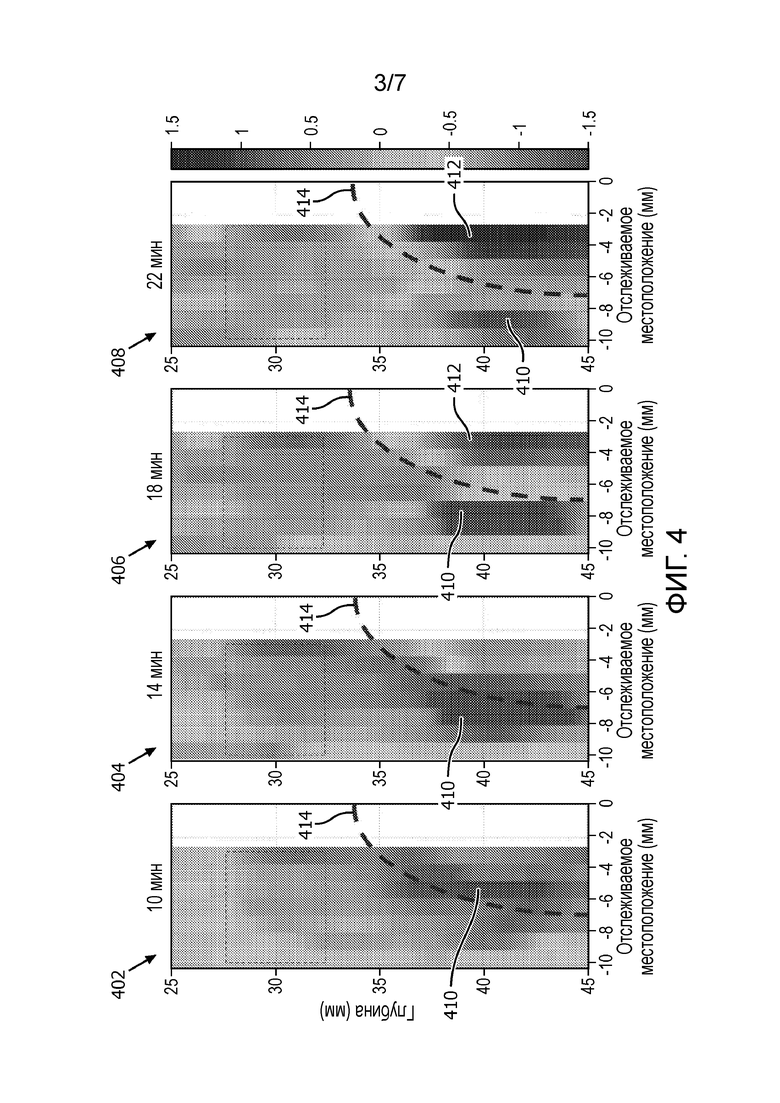
На фиг. 4 представлены графики глубины (мм) в зависимости от отслеживаемых местоположения (мм) для четырех времен лечения (10 мин, 14 мин, 18 мин и 22 мин соответственно) для формирования повреждений, которые показывают характеристики размягчения и твердения ткани после абляции в соответствии с одним из вариантов осуществления;
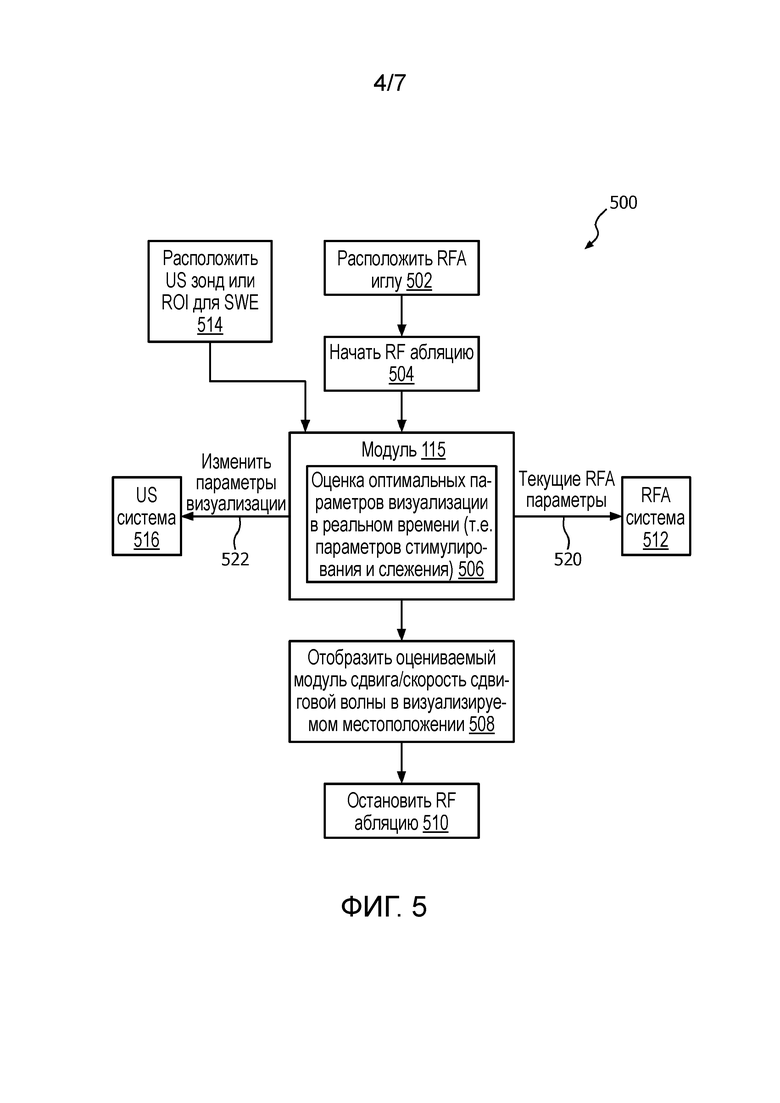
на фиг. 5 представлена блочная/потоковая диаграмма, показывающая систему/способ осуществления абляции с использованием обратной связи от абляционного устройства для того, чтобы менять параметры визуализации в соответствии с полезными вариантами осуществления;
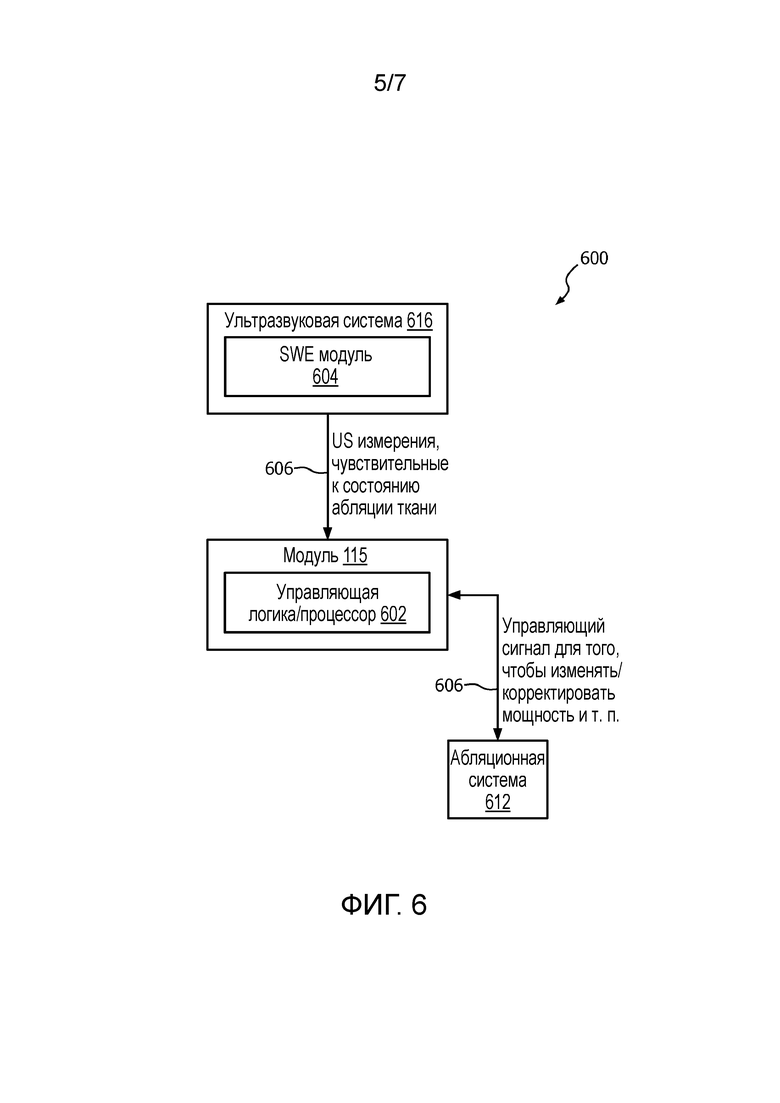
на фиг. 6 представлена блочная/потоковая диаграмма, показывающая систему/способ осуществления абляции с использованием обратной связи от устройства визуализации (эластографической информации) для того, чтобы менять параметры визуализации абляционного устройства в соответствии с полезными вариантами осуществления;
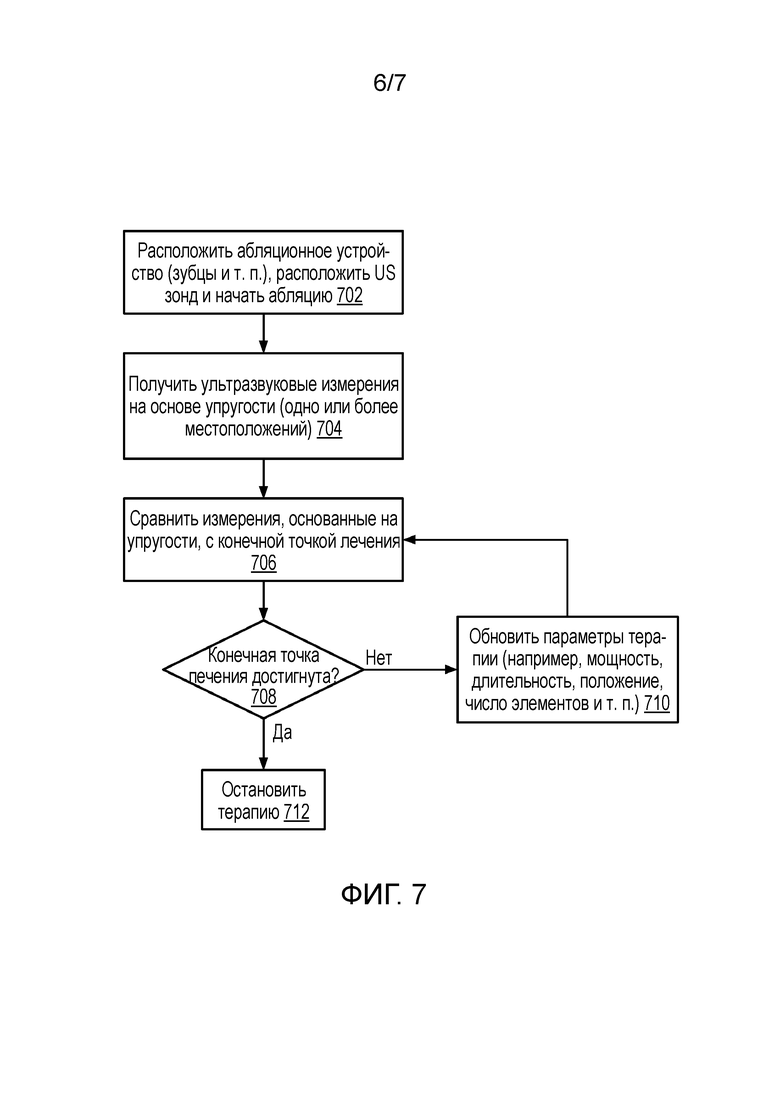
на фиг. 7 представлена потоковая диаграмма, показывающая способ осуществления абляции с использованием обратной связи от устройства визуализации (эластографической информации) для того, чтобы менять параметры визуализации абляционного устройства для лечения в соответствии с полезными вариантами осуществления; и
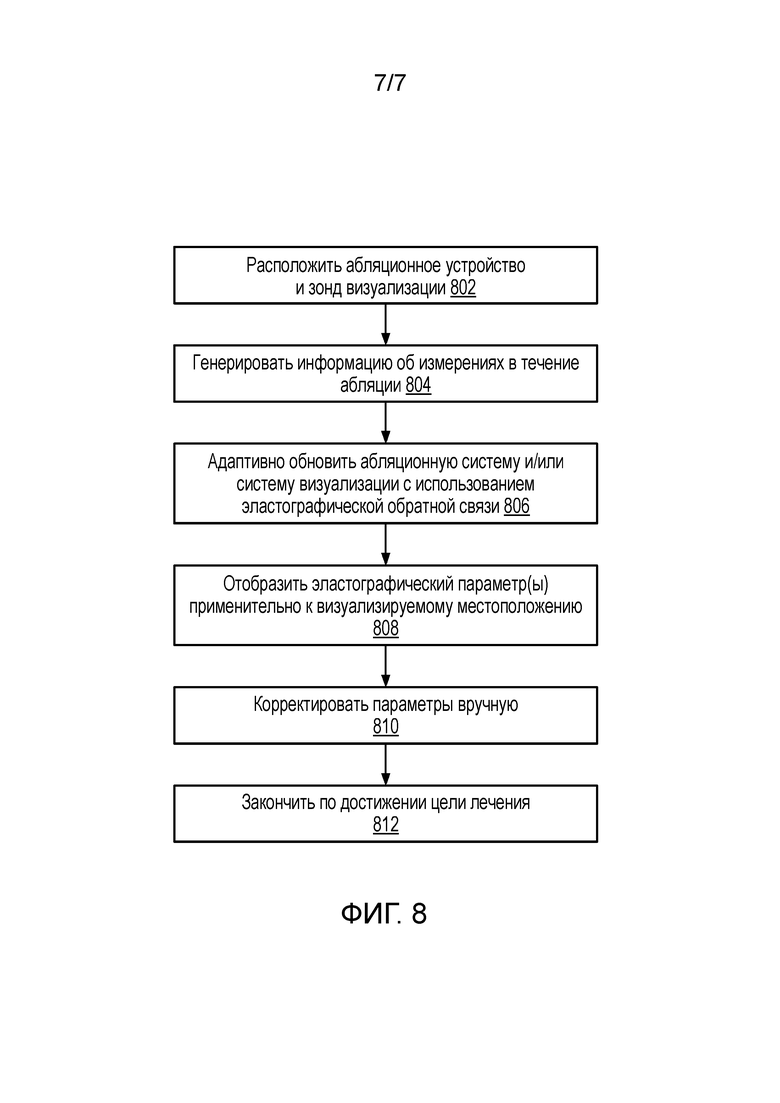
на фиг. 8 представлена потоковая диаграмма, показывающая способ осуществления абляции в соответствии с полезными вариантами осуществления.
Осуществление изобретения
В соответствии с данными принципами, система, способ и устройства описаны для обеспечения обратной связи в реальном времени с клиницистом или другим оператором во время процедуры абляции. В особенно полезных вариантах осуществления в системе, способе и устройствах используют эластографию сдвиговой волны (SWE) в качестве модальности для мониторинга процедур радиочастотной абляции (RFA). Во время RFA, эластические свойства тканей меняются так, что участок, подлежащий абляции, сначала становится мягче и затем постепенно тверже. SWE может разрешать степень формирования повреждения во время RFA из-за зависимости скорости сдвиговой волны от жесткости, лежащей в основе, посредством определения изменений в модуле сдвига во время формирования повреждения. Могут быть предусмотрены различные наборы параметров для стимулирования и отслеживания модуля сдвига или другой сдвиговой волны или параметры упругости на различных этапах процесса формирования повреждения.
В соответствии с данными принципами, система, способ и устройства обеспечивают оптимизацию в реальном времени для параметров стимулирующих и следящих импульсов, чтобы делать возможным более точный и надежный мониторинг RFA процедуры посредством обеспечения более точной оценки скорости и модуля сдвига. RFA лечением можно управлять на основании оцениваемого модуля сдвига, чтобы достигать полного разрушения опухоли.
Данные принципы автоматически меняют параметры стимулирующих и следящих импульсов, на основании входных сигналов от RFA системы. Таким образом, на всех этапах RFA можно получать надежные оценки скорости (и, таким образом, оценки модуля сдвига). Данные системы включают канал связи (или контур обратной связи) между RFA системой и ультразвуковой (US) системой. Параметры, которые оптимизируют в реальном времени, могут включать, но не ограничиваясь этим: частоту повторения импульса (PRF), число отслеживаемых местоположений, расстояние между следящими пучками и т. д. Например, в начале RFA процедуры, можно использовать вектор параметров «X». От истекшего времени RFA (и/или выходной мощности/напряжения или другого входного сигнала), вектор параметров будут менять соответственно (сначала на «Y», затем на «Z» и так далее). Значения для «X», «Y», «Z», и т. д. можно определять эмпирически. Примером линии между RFA и US системами может быть кабель Ethernet, интерфейсная компьютерная/схемная плата и т. д.
Модуль сдвига представляет собой внутреннее свойство ткани, и существует прямая зависимость для многих опухолей и степени повреждения ткани (некроза). Решения, связанные с лечением, могут быть основаны на этом параметра. Стандартные RFA системы или работают без какой-либо обратной связи или с ограниченной обратной связью в форме температуры на кончике RF зонда или электрического импеданса в замкнутой схеме. Оба этих способа с обратной связью являются непрямыми и, таким образом, склонны быть субоптимальными при отслеживании эффекта лечения. Например, температура на кончике зонда может не полностью отражать то, вся ли опухоль уничтожена, в частности, на краях опухоли, что является наиболее распространенной клинической причиной местного рецидива. Более надежное основание для управления RFA лечением будет состоять в том, чтобы основывать решения на фактических изменениях, наблюдаемых ткани (например, изменения жесткость или модуля) для решения автоматизированного адаптивного лечения.
В одном из вариантов осуществления автоматизированное решение адаптирует RFA лечение в реальном времени, на основании оцениваемых параметров ткани (например, модуль сдвига) во время абляции. Например, ткань печени после абляции (полностью некротическая) имеет модуль сдвига > 20 кПа в сравнении с таковым у нормальной печени приблизительно 5 кПа. Модуль сдвига можно оценивать в какой-либо желаемой точке в ткани. посредством оценки модуля на границах повреждения, можно принимать решения для того, чтобы надлежащим образом адаптировать RFA лечение (например, увеличивать время абляции, останавливать абляцию, изменять положение RF зонда(ов) и т. д.). Например, если оцениваемый модуль сдвига в предполагаемых границах повреждения составляет 10 кПа, можно заключить, что ткань в этом местоположении не является полностью некротической и RFA лечение можно продлевать до тех пор, пока оцениваемый модуль не станет ~20 кПа. Этот вариант осуществления можно сделать возможным посредством канала связи от US системы к RFA системе. Модуль сдвига (и, необязательно, другие соответствующие параметры), оцениваемые с помощью US системы, передают в RFA систему по этой линии, для использования при адаптации протокола лечения.
Следует понимать, что настоящее изобретение описано в отношении медицинских устройств; однако положения настоящего изобретения значительно шире и применимы к любым абляционным системам или устройствам. В некоторых вариантах осуществления данные принципы используют при отслеживании, лечении или анализе биологических тканей. В частности, данные принципы применимы к процедурам для лечения или модификации биологических тканей во всех областях организма, таких как легкие, желудочно-кишечный тракт, выделительные органы, печень, почки, кровеносные сосуды и т. д. Элементы, изображенные на фиг., можно реализовать в различных комбинациях аппаратного обеспечения и программного обеспечения, и они могут обеспечивать функции, которые можно комбинировать в одном элементе или множестве элементов.
Функции различных элементов, представленных на фиг., можно обеспечивать через использование специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного исполнять программное обеспечение, в сочетании с подходящим программным обеспечением. При обеспечении с помощью процессора, функции можно обеспечивать посредством одного специализированного процессора, посредством одного процессора совместного использования или посредством множества отдельных процессоров, некоторые из которых могут быть совместного использования. Кроме того, явное использование термина «процессор» или «контроллер» не следует толковать как относящееся исключительно к аппаратному обеспечению, способному исполнять программное обеспечение, и оно может неявно включать, без ограничения, аппаратное обеспечение цифрового сигнального процессора («DSP»), постоянное запоминающее устройство («ROM») для хранения программного обеспечения, оперативное запоминающее устройство («RAM»), энергонезависимый накопитель и т. д.
Кроме того, в настоящем документе все утверждения, где излагают принципы, аспекты и варианты осуществления изобретения, а также их конкретные примеры, предназначены для того, чтобы охватывать как их структурные, так и их функциональные эквиваленты. Дополнительно, подразумевают, что такие эквиваленты включают как эквиваленты, известные в настоящее время, так и эквиваленты, разработанные в будущем (т. е. какие-либо разработанные элементы, которые выполняют ту же функцию, независимо от структуры). Таким образом, например, специалисты в данной области примут во внимание, что блочные диаграммы, представленные в настоящем документе, представляют принципиальные изображения компонентов иллюстративных систем и/или схем, осуществляющих принципы изобретения. Аналогичным образом, следует принимать во внимание, что какие-либо блок-схемы, потоковые диаграммы и т. п. представляют различные процессы, которые можно по существу представлять в машиночитаемых запоминающих средах и так исполнять с помощью компьютера или процессора, независимо от того, показан ли такой компьютер или процессор явно.
Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, доступного в используемой компьютером или машиночитаемой запоминающей среде, предоставляющей программный код для использования посредством компьютера или какой-либо системы исполнения инструкций или в сочетании с ними. Для целей этого описания, используемая компьютером или машиночитаемая запоминающая среда может представлять собой какой-либо аппарат, который может содержать, хранить, передавать, распространять или транспортировать программу для использования с помощью системы, аппарата или устройства исполнения инструкций или в сочетании с ними. Среда может представлять собой электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему (или аппарат или устройство) или среду распространения. Примеры машиночитаемой среды включают полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. Существующие примеры оптических дисков включают постоянное запоминающее устройство на компакт-дисках (CD-ROM), читаемый/записываемый компакт-диск (CD-R/W), Blu-RayTM и DVD.
[0001] В описании отсылка к «одному из вариантов осуществления» или «варианту осуществления» данных принципов, также другим их вариациям, обозначает, что конкретный признак, структура, характеристика и так далее, описанные в сочетании с вариантом осуществления, включены в по меньшей мере один из вариантов осуществления данных принципов. Таким образом, появление фразы «в одном из вариантов осуществления» или «в варианте осуществления», равно как и любые другие вариации, встречающиеся в различных местах на всем протяжении описания, не обязательно все относятся к одному и тому же варианту осуществления.
[0002] Следует принимать во внимание, что использование любого из следующего «/», «и/или» и «по меньшей мере один из», например, в случаях «A/B», «A и/или B» и «по меньшей мере один из A и B», предназначено для того, чтобы охватывать выбор только первой перечисленной возможности (A) или выбор только второй перечисленной возможности (B) или выбор обеих возможностей (A и B). В качестве дополнительного примера в случаях «A, B и/или C» и «по меньшей мере один из A, B и C», такие фразы предназначены для того, чтобы охватывать выбор только первой перечисленной возможности (A) или выбор только второй перечисленной возможности (B) или выбор только третьей перечисленной возможности (C) или выбор только первой и второй перечисленных возможностей (A и B) или выбор только первой и третьей перечисленных возможностей (A и C) или выбор только второй и третьей перечисленных возможностей (B и C) или выбор всех трех возможностей (A и B и C). Это можно расширять, как абсолютно очевидно среднему специалисту в этой и связанных областях, на многие перечисленные элементы.
Далее, со ссылкой на фиг., на которых схожие номера позиций представляют одни и те же или схожие элементы, и сначала на фиг. 1, система 100 для осуществления абляции иллюстративно представлена в соответствии с одним из вариантов осуществления. Система 100 может содержать рабочую станцию или консоль 112, с которой за процедурой наблюдают и/или управляют ей. Рабочая станция 112 предпочтительно содержит один или более процессоров 114 и память 116 для хранения программ и приложений. Память 116 может хранить по меньшей мере часть модуля 115 оценки параметров и мониторинга, выполненного с возможностью оценивать/оптимизировать параметры визуализации для системы 104 визуализации (например, для параметров стимулирования и слежения) и/или для того, чтобы оценивать/оптимизировать параметры абляции для абляционного устройства (абляционных устройств) 102 (например, активация или деактивация абляционных устройств 102). Сигналы обратной связи от ультразвукового (US) устройства или системы 104 используют для того, чтобы измерять модуль сдвига, скорость сдвиговой волны, упругость ткани или другие характеристики в местоположении, которое визуализировали или лечили, чтобы обеспечивать информацию в реальном времени, касающуюся областей прогрессирования и лечения во время процедуры. Модуль 115 оценки параметров и мониторинга может содержать программное обеспечение (например, программы для параметров обновления) и/или аппаратное обеспечение (например, линии Ethernet между устройством 104 визуализации и абляционным устройством 102).
Модуль 122 планирования можно хранить в памяти 116 и предоставлять последовательности целей, задач и заданий для осуществления процедуры. Модуль 122 планирования может хранить пороги и другие критерии для сравнения между параметрами, которые измеряют и мониторинг которых осуществляют, и порогами/критериями. Абляционное устройство или устройство 102 может содержать или быть частью катетера, проволочного направителя, зонда, эндоскопа, робота, электрода, фильтрующего устройства, баллонного устройства или другого медицинского компонента для выполнения абляции. Абляция может включать RF абляцию, криоабляцию, фокусированный ультразвук высокой интенсивности (HIFU), лазерную абляцию, микроволны и т. д. Абляционное устройство 102 можно соединять с контроллер 126 абляции и управлять им с его помощью, несмотря на то, что функциями контроллера можно управлять с использованием рабочей станции 112. Абляционное устройство 102 и контроллер 126 (который может содержать датчики или тому подобное) совместно обозначают как абляционная система 124. Данные принципы предусматривают адаптивное управление абляционной терапией, которые можно применять к какому-либо коммерческому устройству, используемому для абляционной терапии.
Абляционная система 124 содержит абляционное устройство 102 и контроллер 126 абляции. Абляционная система 124 может представлять собой часть рабочей станции 112 или может представлять собой независимый блок, управляемый с использованием обратной связи, создаваемой посредством рабочей станции 112. Канал 128 связи между абляционной системой 124 и US системой 104 можно предусмотреть для того, чтобы сделать возможной обратную связь с абляционной системой 124 и/или системой 104 визуализации, чтобы более точно оценивать прогресс абляции и другие параметры во время процедуры.
В одном из вариантов осуществления рабочая станция 112 содержит модуль 148 генерации изображений для того, чтобы отображать измеряемые параметры на изображениях в реальном времени или рядом с ними, эти изображения получают во время процедуры с использованием US системы 104. Следует отметить, что эластографическую информацию (например, модуль сдвига, скорость сдвига, упругость и т. д.) измеряют/осуществляют ее мониторинг с использованием US визуализации; однако другие модальности визуализации можно использовать в дополнение к US или взамен него, и их можно адаптировать для того, чтобы измерять эти или другие параметры для того, чтобы предоставлять обратную связь для процесса абляции. Изображение 134 можно модифицировать или предоставлять с наложением, включающим параметры упругости или сдвига, и отображать на устройстве 118 отображения, чтобы предоставлять пользователю обратную связь в реальном времени и демонстрировать прогресс процедуры абляции. Другое наложение или модификацию можно отображать на дисплее 118 для того, чтобы демонстрировать цели или критерии в соответствии с планом, хранимым в модуле 122 планирования. Например, по мере лечения ткани сравнение или изменения упругости можно измерять и отображать, и можно в реальном времени создавать визуальное сравнение с областями, подлежащими лечению, как отображено в соответствии с планом, хранимым в модуле 122 планирования. Таким образом, одновременно доступно незамедлительное понимание об остающихся областях, подлежащих лечению, а также областях покрытия лечением в пространстве или объеме (субъекте) 131 у пациента.
Рабочая станция 112 содержит дисплей 118 для просмотра одного или более внутренних изображений 134 субъекта (пациента) или объема 131. Дисплей 118 также может позволять пользователю взаимодействовать с рабочей станцией 112 и ее компонентами и функциями или каким-либо другим элементом в системе 100. Это дополнительно облегчают с помощью интерфейса 120, который может содержать клавиатуру, мышь, джойстик, осязательное устройство или какое-либо другое периферическое устройство или средство управления, чтобы предоставлять пользователю обратную связь от рабочей станции 112 и взаимодействие с ней.
В одном из вариантов осуществления процесс абляции может иметь ручной аспект. В таком случае в настоящее время выбранные параметры визуализации и получаемые оценки скорости сдвига и модуля сдвига можно отображать на дисплее 118, чтобы помогать оператору при наведении. Оператору можно предоставлять механизм (например, программную/виртуальную кнопку) (интерфейс 120), чтобы переопределять автоматически выбранные значения параметров визуализации и допускать ручную работу с обратной связью от абляционной системы 124 и/или US системы 104.
В соответствии с данными принципами, эластографию сдвиговой волны (SWE) можно использовать для мониторинга абляции и, в частности, радиочастотной абляции (RFA). Во время RFA, эластические свойства ткани меняются, например, участок, подлежащий абляции, сначала становится мягче, и затем постепенно тверже. SWE разрешает степень формирования повреждения во время RFA благодаря зависимости скорости сдвиговой волны от жесткости, лежащей в основе. Количественную меру изменения локальной жесткости можно получать из параметров, таких как смещение, вызванное силой излучения, и время до пика (TTP), измеряемых по сдвиговой волне.
Модуль 115 оценки параметров и мониторинга автоматически меняет параметры стимулирующих и следящих импульсов US системы 104 (например, для смещения, вызванного силой излучения), на основании входных сигналов от RFA системы 124. Таким образом, на всех этапах RFA можно получать надежные оценки скорости (и, таким образом, оценки модуля сдвига). Если RFA система 124 и US система 104 представляют собой отдельные блоки, линия 128 может соединять RFA систему 124 с US системой 104 (например, консоль сканера). Альтернативно, как RFA система 124, так и US система 104 может быть соединена или быть частью рабочей станции 112, которая собирает данные от обеих систем. В таком случае оцениваемые параметры визуализации (т. е., параметры стимулирования и слежения, параметры управления абляцией и т. д.) передают обратно в соответствующую систему (например, US систему 104 и/или абляционную систему 124) для того, чтобы корректировать параметры.
Релевантные параметры, которые можно извлекать из RFA системы 124, могут включать, например, затраченное RFA время, накопленную внесенную мощность, текущую температуру на кончике RF зонда, текущую температуру на каждом зубце (электроде абляционного устройства 102) наряду с местоположением этого зубца, и т. д. Подходящие параметры визуализации (т. е., параметры стимулирования и слежения) можно отбирать с помощью модуля 115 оценки параметров и мониторинга, чтобы изменять в различные моменты времени на основании входных сигналов от RFA системы 124 (например, с использованием предварительно определяемой таблицы соответствия, программы или другой структуры данных или модели 130). Дополнительно, местоположение в опухоли или ткани, которое в настоящее время визуализируют, также может быть определяющим фактором при выборе параметров визуализации. Например, визуализация ближе к границам повреждения может требовать других настроек визуализации по сравнению с визуализацией центра RF повреждения.
Со ссылкой на фиг. 2, графики 202, 204 нормализованного смещения в зависимости от времени лечения (сек.) для ткани печени коровы демонстрируют изменения параметров во время формирования повреждения по мере прогресса терапии. Графики 202, 204 нормализованного смещения иллюстрируют начальное размягчение, после чего следует твердение для независимых повреждений, создаваемых в печень коровы ex vivo. Изображения 201, 203 на вкладках представляют повреждения, визуализируемые на макропатологии. Измерения осуществляли в одном местоположении вблизи от ядра зоны нагрева во время RF абляции в печени коровы. Изображены два образца, соответствующие графикам 202 и 204. Тенденция начального увеличения 206, 208 смещения из-за размягчения сменяется снижением 210, 212 нормализованного смещения 210, 212 из-за твердения. Смещения 210, 212 нормализованы так, что пиковое значение всегда составляет 1.
Со ссылкой на фиг. 3, иллюстративно представлены графики 302, 304 и 306, демонстрирующие изменение времени до пика в качестве функции времени лечения в плоскости, параллельной абляционному электроду и расположенной на 3 мм от него. Графики 302, 304 и 306 показывают латеральные положения слежения (отражающие расстояние) вдали от фокуса толчка. Тенденция соответствует тому, что ожидают по мере прогресса абляции и формирования повреждения. Изменение времени до пика демонстрирует начальное увеличение, поскольку сдвиговая волна дольше достигает местоположения, после которого следует снижение из-за увеличенной скорости при твердении.
Моделирование конечных элементов показывает, как временной профиль кривой смещения сдвиговой волны в зависимости от времени распространения, значительно различается между мягкой (например, жесткость приблизительно 1,33 кПа) и жесткой (например, жесткость приблизительно 8 кПа) тканью. Модуль сдвига нормальной ткани составляет ~ 2 кПа, тогда как он близок к 40-50 кПа или более для ткани после абляции и, таким образом, различие значительно. Если фиксированную частоту дискретизации (или частоту повторения импульса (PRF)), которая подходит для нормальной ткани, также используют для ткани после абляции, кривая смещения для ткани после абляции будет недостаточно дискретизирована, что ведет к ошибочному измерению времени до пика (TTP) и, следовательно, неточной оценке модуля сдвига.
Во время абляции, когда температура возрастает, ткань изначально размягчается и затем в конечном итоге затвердевает, данные принципы используют это знание для того, чтобы оптимизировать параметры с тем, чтобы поддерживать полную целостность профиля времени до пика во время всего курса лечения. На основании знания об ожидаемой вариации профиля времени до пика будет полезно оптимизировать серию параметров, например, частоту дискретизации (также известную как частота повторения импульса (PRF)) и расстояние между отслеживаемыми местоположениями, в качестве функции фазы лечения. Эти признаки можно реализовать/выбирать на лету во время лечения.
Жесткость ткани снижается в начале нагрева из-за размягчения ткани в ответ на повышение температуры. Когда достигают пороговой температуры некроза ткани, ткань начинает затвердевать и продолжает вести себя так при увеличенном тепловом воздействии. Посредством отслеживания этого изменения можно оценивать прогресс терапии и можно определять конечную точку. Жесткость ткани можно измерять с использованием сдвиговой волны визуализации (или компонента Philips® ElastPQTM в системах визуализации Philips®). В этих способах используют силу акустического излучения для того, чтобы генерировать смещение и сдвиговые волны, которые затем отслеживают для того, чтобы извлекать информацию о жесткости.
Способы мониторинга и оценки терапии в реальном времени, описанные в настоящем документе, используют для того, чтобы сделать возможной модификацию параметров доставки терапии на лету для того, чтобы оптимизировать результат терапии. Данные принципы корректируют параметры терапии на основании измерений сдвиговой волны/модуль сдвига и/или эластографии, получаемых от ультразвукового сканера в реальном времени. Эти эластографические измерения можно проводить во всем объеме лечения во множестве ориентаций и предоставлять более полную картину эффекта лечения по сравнению со стандартными системами.
Со ссылкой на фиг. 4, иллюстративно представлены графики, показывающие карты упругости, основанные на времени до пика (TTP) в различные моменты времени, в течение 22-минутной абляции. Первая карта 402 показывает упругость после 10 минут абляции. Вторая карта 404 показывает упругость после 14 минут абляции. Третья карта 406 показывает упругость после 18 минут абляции. Четвертая карта 408 показывает упругость после 22 минут абляции. Темные участки 410, двигающиеся влево через карты 402-408, представляют размягчение, и темные участки 412 справа представляют твердение повреждения в печени коровы ex vivo. Штриховые линии 414 представляют конечную границу теплового повреждения, которую оценивают при патологической оценке.
В соответствии с данными принципами, авторы настоящего изобретения осуществляли эксперименты для того, чтобы иллюстрировать полезность эластографических измерений, одновременно с формированием повреждения во время RFA. В этих экспериментах, последовательность слежения включала семь местоположений, расположенных на расстоянии 1,5 мм от стимулирующего пучка. Ультразвуковой зонд ориентировали поперечно абляционной игле так, что абляционная игла была на ультразвуковом изображении в виде в поперечном разрезе. Окно ElastPQTM аккуратно размещали на экране так, что левый край находился в 10 мм от абляционного зубца. Необработанные ультразвуковые данные в ответ на каждую последовательность стимулирования-слежения получали каждые 15 секунд в течение всего курса лечения. Данные обрабатывали для того, чтобы получать оценки времени до пика (TTP) в течение всего курса абляции. TTP значения получали для каждой линии слежения при осевом расстоянии 3 мм. Таким образом, получали пространственную карту, иллюстрирующую вариации TTP по всему участку, подвергаемому тепловой абляционной терапии.
Из моментальных TTP карт 402, 404, 406, 408, разностную TTP карту получают посредством сравнения с первым TTP кадром, полученным перед нагревом. TTP карты 402, 404, 406, 408 показаны в различные моменты времени. Абляционный зубец находился на глубине 45 мм и приблизительно в 2 мм от правого края изображения. Положительные значения на картах показывают, что ткань затвердевает (поскольку на данной карте снизилось TTP), тогда как отрицательные значения показывают, что она размягчается (на данной карте возросло TTP). Используя эту условность, можно видеть, что изначально около абляционного зубца ткань размягчается (10 мин) и это размягчение постепенно (14, 18 и 22 мин) удаляется от правого края (близко к зубцу) в направлении левого края (близко к границе повреждения). Одновременно, правый край также начинает затвердевать, поскольку он находится близко к зубцу. Эффект твердения также постепенно начинает перемещаться справа налево во время нагрева, т. е., от ткани ближе к зубцам к участкам ближе к границам повреждения, которое формируют.
Из-за больших изменений в модуле сдвига во время формирования повреждения, различные наборы параметров для стимулирования и слежения оптимальны на различных этапах процесса формирования повреждения. Параметры, которые можно оптимизировать, могут включать частоту повторения импульса (PRF), число отслеживаемых местоположений, расстояние между следящими пучками и т. д. Однако изменения этих параметров может требоваться выполнять вручную оператором, на основании истекшего времени RF абляции. Это не удобно, а также не оптимально, поскольку решение менять эти параметры можно принимать субъективно по усмотрению пользователя. Оптимальные значения для этих параметров эмпирически выведены для различных этапов RFA процесса, по лабораторным экспериментам ex vivo. Эти эмпирически полученные значения параметров могут быть связаны с различными сигнатурами RFA процесса (например, затраченное RFA время, накопленная выходная мощность, температура на кончике RF зонда и т. д.). Использование таких метрик автоматизированным образом можно использовать в соответствии с данными принципами для того, чтобы оптимизировать параметры визуализации (стимулирования и слежения) в реальном времени, для оптимальной и точной оценки скорости сдвига и модуля сдвига.
Со ссылкой на фиг. 5, блочная/потоковая диаграмма представляет систему/способ 500, который предусматривает канал 520/522 связи (обратной связь) между RFA системой 512 и US системой 516 (через модуль 115). Канал связи или соединение 520/522 может содержать комбинацию аппаратного обеспечения и программного обеспечения для того, чтобы передавать и корректировать параметры из RFA системы 512 по параметрам для US системы 516. Параметры оптимизируют в реальном времени посредством модуля 115 оценки параметров и мониторинга, который содержит модуль 506 оптимизации, по линии 520/522. Модуль 506 оптимизации оптимизирует параметры, например, такие как частота повторения импульса (PRF), число отслеживаемых местоположений, расстояние между следящими пучками или какой-либо другой подходящий параметр. Например, в начале RFA процедуры вектор параметров «X» следует направлять в модуль 506 по соединению 520. По затраченному RFA времени (и/или выходной мощности/напряжению или другому входному сигналу) вектор параметров меняют соответственно (сначала на «Y», затем на «Z» и так далее). Значения для «X», «Y», «Z» можно определять эмпирически с использованием модели, таблицы соответствия, формулы или другого способа оценки. В одном из вариантов осуществления измерения акустического поля (например, параметры сдвиговой волны, модули сдвига и т. д.) можно осуществлять, пока систему 500 используют в сочетании с RFA системой 512 для того, чтобы измерять значения параметров. Например, вектор X может содержать затраченное RFA время, накопленную внесенную мощность, текущую температуру на кончике RF зонда, текущую температуру на каждом зубце наряду с местоположением этого зубца и т. д. Эти признаки можно обновлять посредством модуля 506 для вывода вектора Y в соединение 522 в US систему 516. Соединения 520/522 могут включать кабель Ethernet, интерфейсную компьютерную/схемную плату, беспроводные каналы связи и т. д.
В одном из вариантов осуществления RFA зонд (102, фиг. 1) вводят в ткань в блоке 502 для того, чтобы начинать абляцию в блоке 504. US зонд или участок, представляющий интерес, (ROI) также располагают и настраивают для SWE в блоке 514. Подходящие RFA параметры непрерывно считывают из RFA системы 512. Модуль 506 оптимизации предлагает оптимальные настройки визуализации (например, настройки параметров стимулирования и слежения) для использования в этот момент на основании комбинации RFA настроек и текущего местоположения зонда. Это можно определять с помощью сохраненного плана или на основании опыта оператора и т. д. Модуль 506 учитывает выходные сигналы визуализации сдвиговых волн при вычислении новых параметров стимулирования и слежения. Модуль 115 оценки параметров и мониторинга дополнительно содержит модуль 508 обработки изображений (модуль 148, фиг. 1), выполненный с возможностью отображать оцениваемый модуль сдвига в заданном местоположении (например, на одном из экрана US системы 516, экрана отдельного компьютера или дисплея 118). Кроме того, также можно отображать параметры визуализации, которые выбраны в этот момент (посредством модуля 506). Пользователь также может переопределять автоматический выбор параметров визуализации посредством ввода своего выбора параметров в какой-либо момент с использованием интерфейса 120 (фиг. 1).
В любое время оператор может перемещать US зонд (или ROI для SWE) в другое местоположение (блок 514). Используя знание о пространственных координатах нового местоположения применительно к абляционному электроду, параметры визуализации обновляют соответствующим образом. Абляционный зонд также можно повторно располагать в новом местоположении в блоке 502. В блоке 510 абляцию останавливают и процесс заканчивается, когда достигают цель или цели процедуры или выполнены другие критерии. Система 500 допускает более точный и надежный мониторинг RFA процедуры, делая возможной точную оценку скорости и модуля сдвига автоматизированным образом. Данные принципы можно внедрять в SWE модуль (например, Philips ElastPQTM и/или Визуализация сдвиговых волн (SWI)) на ультразвуковой платформе.
Со ссылкой на фиг. 6, другая блочная/потоковая диаграмма представляет систему/способ 600, который предусматривает канал связи или соединение 606 для того, чтобы управлять RFA системой 612 на основе обратной связи (изображения и/или данные) от US системы 616. Канал связи или соединение 606 может содержать комбинацию аппаратного обеспечения и программного обеспечения для того, чтобы передавать и корректировать параметры RFA системы 612 по параметрам для US системы 616.
Существующие предписания для абляционной терапии основаны на использовании температурных (или импедансных в устройствах некоторых производителей) показаний от устройства. Температурные показания получают от небольшого набора термопар, расположенных на кончике абляционного электрода. Термопары предоставляют локальную информацию о росте температуры в центральном ядре повреждения, но не содержат полезной информации об эффекте терапии на границах.
В соответствии с данными принципами, эластографическая визуализация посредством US системы 616 предоставляет путь для того, чтобы измерять прямые эффекты изменений, вызванных терапией, в потенциально множестве пространственных измерений, охватывая всю протяженность повреждения. Эту исчерпывающую информацию, извлекаемую из ультразвукового сканера, затем можно использовать для того, чтобы оптимизировать выходной сигнал доставки мощности для различных абляционных электродов, которые используют в многоэлектродной нагревающей конфигурации.
Затем эту информацию в реальном времени используют для того, чтобы адаптировать параметры доставки терапии посредством избирательного повышения или снижения мощности, выключения некоторых из абляционных электродов и т. д. на основании исчерпывающих измерений, выполняемых не только в ядре повреждения, но также на границе повреждения.
US система 616 содержит ультразвуковой сканер, оборудованный модулем 604 эластографической визуализации/измерений, который может получать оценки локальных свойств жесткости в реальном времени во время абляции. Модуль 115 оценки параметров и мониторинга дополнительно может содержать устройство 602 управления абляционной терапией, которое может динамически менять настройки мощности на основании входных сигналов от независимого источника (например, изображения или данные от US системы 616 и/или SWE модуля 604). Устройство 602 управления абляционной терапией может содержать управляющую логику или процессор (например, рабочая станция 112, фиг. 1)), который принимает измерения на основе ультразвука (например, оценки модуля сдвига или эластографические оценки) от ультразвуковой системы 616 и меняет настройки мощности или режим работы модуля абляционного генератора на основании предварительно определяемого порога, который отвечает в одной или более точках карте пространственных и/или временных измерений.
Линия или соединение 606 данных (через модуль 115) допускает передавать измерения из ультразвуковой системы 616 в абляционное устройство 612.
В системе 600 используют эластографические измерения, например, получаемые во время RF абляционного нагрева. В одном из вариантов осуществления используют модифицированную версию Elastography Point Quantification (режим ElastPQTM), которая может быть, например, на ультразвуковом сканере iU-22, оборудованном зондом C5-1. Несмотря на то, что варианты осуществления в настоящем документе относятся к измерениям конкретных типов, извлекаемым из ультразвука, данные принципы можно распространять на любые другие, которые предусматривают контуры повреждения во время терапии. Эластографические измерения (такие как способ Elastography Point Quantification (ElastPQTM)), выполненные в различных местоположениях, как в центре повреждения, так и около границ повреждения, отражают прогресс формирования повреждения. С учетом этих измерений на основе эластографии в реальном времени, которые отражают текущее состояние терапии, можно осуществлять выбор множества репрезентативных пространственных точек около центра и периферии зоны абляции, и можно осуществлять мониторинг изменений TTP оценок.
В одном из вариантов осуществления фактические значения модуля сдвига (или Юнга) можно использовать в качестве входных данных для процессора/модуля 602 управления. В другом варианте осуществления можно использовать изменения в оценках TTP. Также предусмотрены другие параметры управления, такие как скорость сдвига и т. д. Параметры эластографии можно использовать для обновления участка, который лечили (пиксели/воксели), сравнения с запланированным объемом лечения (PTV) и подачи в процессор, связанный с абляционным устройством 612. Процессор или модуль 602 управления может принимать решение о том, чтобы останавливать доставку мощности или модифицировать профиль внесения мощности в реальном времени посредством сравнения измерений с предварительно заданным порогом. Алгоритм или программа (130, фиг. 1) для того, чтобы модифицировать мощность, могут быть основаны на алгоритме по типу пропорционально-интегрально-дифференциального (PID) контроллера. Множество пространственных или временных измерений можно использовать в логике принятия решения контроллером.
В другом варианте осуществления система 600 может предлагать дополнительное местоположение(я) для абляционных зубцов, чтобы гарантировать полное формирование повреждения. Например, эластографические измерения можно выполнять в желаемом пространственном местоположении. Если измерения показывают, что ткань в этом местоположении не некротизирована и вероятно не будет некротизирована при любом изменении параметров абляции в текущем положении электрода, система 600 может предлагать новое местоположение для зубцов ближе к этому участку ткани. Эту информацию можно предоставлять для пользователя через интерфейс (например, дисплей 118, фиг. 1).
Со ссылкой на фиг. 7, способ использования эластографической обратной связи для процедуры абляции иллюстративно представлен в соответствии с иллюстративными вариантами осуществления. В блоке 702 располагают абляционный зонд или зубец(ы) и ультразвуковой зонд, и начинают абляцию. В блоке 704 выполняют ультразвуковые измерения на основе упругости в одном или более местоположениях около участка, подвергшегося абляции. В блоке 706 измерение(я) упругости сравнивают с конечной точкой. Конечная точка может включать конечную точку лечения или предшествующее измерение для того, чтобы оценивать прогресс. В блоке 708 выполняют определение того, достигнута ли конечная точка лечения. Если конечная точка лечения достигнута, то в блоке 712 терапию останавливают. Если конечная точка лечения не достигнута, параметры терапии обновляют при необходимости в блоке 710 и процесс возвращается к блоку 704. Параметры, которые обновляют, могут включать, например, мощность, длительность, число используемых нагревательных элементов, расположение зубцов/нагревательных элементов и т. д.
Со ссылкой на фиг. 8, иллюстративно представлен способ осуществления абляции с использованием эластографической обратной связи. Следует понимать, что эластографическую обратную связь можно использовать для того, чтобы корректировать параметры абляционного устройства, параметры визуализации или и то и другое. Данные принципы можно применять через промежутки в зависимости от процедуры, измеряемого порога или других критериев. Например, обратную связь от визуализации можно использовать для того, чтобы менять параметры абляции, параметры абляции можно использовать для того, чтобы менять параметры визуализации, а также и те и другие изменения можно использовать во время одной и той же процедуры, при необходимости.
В блоке 802, абляционное устройство и ультразвуковой зонд (или их множество) располагают у субъекта в или около участка, подлежащего лечению, для того, чтобы начинать абляцию. Если используют другую модальность визуализации, US зонд не нужно располагать. В блоке 804 информацию об измерениях генерируют в качестве обратной связи во время процесса абляции, в том числе эластографический параметр (например, сдвиговая волна, модуль сдвига, упругость/жесткость и т. д.) или соответствующий параметр. Информация об измерениях содержит информацию от абляционного устройства (параметры абляции), ультразвуковой сканер (параметры визуализации) или и то и другое. Информацию обратной связи также можно предоставлять посредством других источников или оборудования. Информация об измерениях ультразвукового сканера может содержать одно или более из модуля сдвига, оценки времени до пика, скорость сдвига и т. д. Информация об измерениях от абляционного устройства может содержать одно или более из затраченного времени абляции, накопленной внесенной мощности, температуры кончика абляционного зонда и/или параметр текущей температуры абляционного зубца.
В блоке 806 по меньшей мере одно из параметров визуализации ультразвукового сканера и/или управляющего сигнала абляционного устройства адаптивно обновляют в соответствии с обратной связью. Параметры визуализации могут включать параметры стимулирования и слежения, которые дополнительно могут включать одно или более из частоты повторения импульса, числа отслеживаемых местоположений и/или расстояния между следящими пучками. Обратная связь от ультразвукового сканера может содержать измерения жесткости из одной или более точек на карте пространственных или временных измерений, где при корректировке управляющего сигнала используют измерения жесткости из одной или более точек на карте пространственных или временных измерений. Управляющий сигнал можно выполнять с возможностью корректировать одно или более из настроек мощности абляционного устройства и/или режима работы абляционного устройства. Также можно управлять расположением, длительностью лечения и конфигурацией (числом элементов и т. д.) абляционного устройства.
В блоке 808 эластографический (относящийся к сдвиговой волне или соответствующий) параметр отображают относительно визуализируемого местоположения на дисплее. Также можно отображать параметры абляции, параметры визуализации или другую информацию. В блоке 810 параметры абляции и/или визуализации можно переопределять вручную посредством изменений вручную через интерфейс.
В блоке 812 завершают процесс абляции, когда достигают цели лечения. Намеченная цель может включать цели из дооперационного плана или другие критерии.
При интерпретации приложенной формулы изобретения следует понимать, что:
a) слово «содержит» не исключает присутствия других элементов или действий, нежели те, что перечислены в данном пункте формулы изобретения;
b) элемент в единственном числе не исключает присутствия множества таких элементов;
c) какие-либо ссылочные позиции в пунктах формулы изобретения не ограничивают их объем;
d) несколько «средств» может быть представлено с помощью одного и того же элемента или структуры или функции, реализованной в аппаратном обеспечении или программном обеспечении; и
e) никакая конкретная последовательность действий не предназначена в качестве необходимой, пока не указано конкретно.
Описав предпочтительные варианты осуществления для систем и способов адаптивной абляции и терапии на основании эластографического мониторинга (которые предназначены в качестве иллюстративных и не ограничивающих), следует отметить, что модификации и вариации могут выполнять специалисты в данной области в свете приведенных выше положений. Следовательно, нужно понимать, что изменения можно выполнять в конкретных раскрытых вариантах осуществления по раскрытию, которые входят в объем вариантов осуществления, описанных в настоящем документе, как определено с помощью приложенной формулы изобретения. Таким образом, описав детали и конкретику, как требует патентное право, в приложенной формуле изобретения изложено то, что заявлено и желательно защитить патентом на изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАЛИБРОВКА УЛЬТРАЗВУКОВОГО, ОСНОВАННОГО НА ЭЛАСТИЧНОСТИ, ОТОБРАЖЕНИЯ ГРАНИЦЫ ОЧАГА ПОРАЖЕНИЯ | 2016 |
|
RU2702090C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УЛЬТРАЗВУКОВОЙ ТЕРАПИИ | 2009 |
|
RU2519378C2 |
| МОНИТОРИНГ И УПРАВЛЕНИЕ HIFU ТЕРАПИЕЙ В РЕАЛЬНОМ ВРЕМЕНИ ВО МНОЖЕСТВЕ ИЗМЕРЕНИЙ | 2011 |
|
RU2579737C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ АБЛЯЦИИ НА ОСНОВЕ КОНТАКТНОЙ СИЛЫ | 2013 |
|
RU2648213C2 |
| СИСТЕМА И СПОСОБ ЭЛАСТОГРАФИЧЕСКИХ ИЗМЕРЕНИЙ | 2014 |
|
RU2667617C2 |
| МЕДИЦИНСКОЕ УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО С ОПРЕДЕЛЕНИЕМ УСИЛИЯ | 2010 |
|
RU2556975C2 |
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АБЛЯЦИЕЙ ДЛЯ МОНИТОРИНГА В РЕАЛЬНОМ ВРЕМЕНИ СМЕЩЕНИЯ ТКАНИ В ОТВЕТ НА ПРИЛОЖЕННУЮ СИЛУ | 2009 |
|
RU2532958C2 |
| КОРРЕКЦИЯ СКОРОСТИ ОРОШЕНИЯ ПРИ РАДИОЧАСТОТНОЙ (РЧ) АБЛЯЦИИ В ОТВЕТ НА ИЗМЕНЕНИЕ УСИЛИЯ КОНТАКТА | 2020 |
|
RU2737762C1 |
| СИСТЕМЫ ПОДАЧИ ЭНЕРГИИ И ИХ ПРИМЕНЕНИЕ | 2016 |
|
RU2721647C2 |
Группа изобретений относится к медицинской технике, а именно к средствам проведения абляции ткани. Система для осуществления абляции содержит абляционное устройство, выполненное с возможностью осуществлять абляцию ткани в соответствии с параметрами управления и осуществлять измерения во время процесса абляции, систему визуализации, выполненную с возможностью измерять эластографический параметр для того, чтобы осуществлять мониторинг прогресса абляции, и модуль оценки параметров и мониторинга, выполненный с возможностью принимать измерения от абляционного устройства и/или эластографический параметр для обеспечения обратной связи для того, чтобы адаптивно корректировать параметры визуализации системы визуализации в различные моменты времени в течение процесса абляции, при этом обратная связь демонстрирует прогресс абляции. По второму варианту выполнения в системе для осуществления абляции модуль оценки параметров и мониторинга выполнен с возможностью принимать эластографические измерения в качестве обратной связи от системы визуализации и корректировать управляющий сигнал для того, чтобы управлять абляционным устройством для достижения терапевтических целей, на основании эластографических измерений. Способ абляции содержит расположение абляционного устройства и ультразвукового зонда в субъекте для того, чтобы начинать абляцию, генерацию информации об измерениях в качестве обратной связи во время процесса абляции, включая эластографический параметр, причем информация об измерениях включает в себя информацию от по меньшей мере одного из абляционного устройства и ультразвукового зонда, адаптивное обновление параметров визуализации ультразвукового зонда и управляющего сигнала абляционного устройства в соответствии с обратной связью, и завершение процесса абляции, когда эластографический параметр соответствует заданному критерию лечения. Использование изобретений позволяет повысить точность абляции за счет адаптивной настройки параметра визуализации. 3 н. и 12 з.п. ф-лы, 8 ил.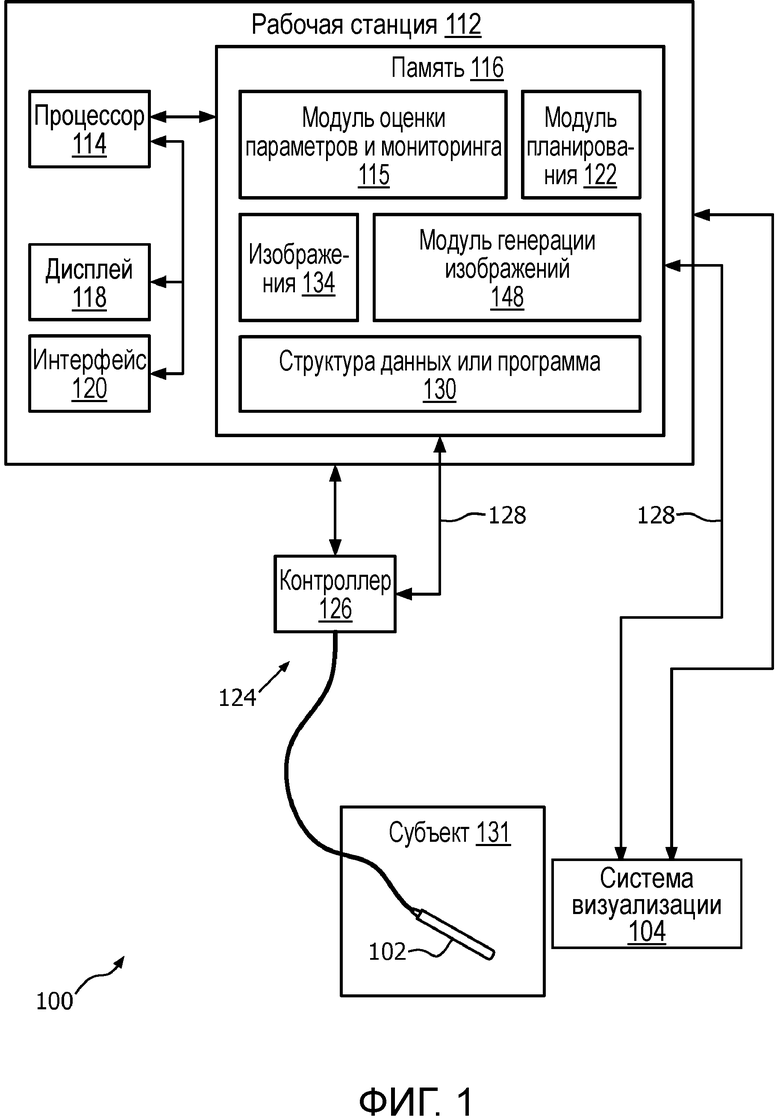
1. Система для осуществления абляции, содержащая:
абляционное устройство, выполненное с возможностью осуществлять абляцию ткани в соответствии с параметрами управления и выполненное с возможностью осуществлять измерения во время процесса абляции;
систему визуализации, выполненную с возможностью измерять эластографический параметр для того, чтобы осуществлять мониторинг прогресса абляции; и
модуль оценки параметров и мониторинга, выполненный с возможностью принимать измерения от абляционного устройства и/или эластографический параметр для обеспечения обратной связи для того, чтобы адаптивно корректировать параметры визуализации системы визуализации в различные моменты времени в течение процесса абляции, при этом обратная связь демонстрирует прогресс абляции.
2. Система по п. 1, в которой параметры визуализации включают в себя параметры стимулирования и слежения, при этом система визуализации выполнена с возможностью измерения по меньшей мере одного из: модуля сдвига, оценок времени до пика по сдвиговой волне и скорости сдвиговой волны, и модуль оценки параметров и мониторинга выполнен с возможностью обеспечения по меньшей мере одного из: модуля сдвига, оценок времени до пика по сдвиговой волне, и скорости сдвиговой волны в качестве обратной связи.
3. Система по п. 1, в которой измерения от абляционного устройства включают в себя одно или более из затраченного времени абляции, накопленной внесенной мощности, температуры кончика абляционного зонда и/или параметра текущей температуры абляционного зубца и указанные измерения от абляционного устройства обеспечиваются в качестве обратной связи.
4. Система по п. 1, в которой модуль оценки параметров и мониторинга корректирует параметры визуализации в соответствии с таблицей соответствия или компьютерной программой.
5. Система по п. 1, дополнительно содержащая модуль отображения, выполненный с возможностью воспроизводить соответствующий эластографический параметр применительно к визуализируемому местоположению на дисплее.
6. Система для осуществления абляции, содержащая:
абляционное устройство, выполненное с возможностью осуществлять абляцию ткани в соответствии с управляющим сигналом;
систему визуализации, выполненную с возможностью осуществлять эластографические измерения в выбранных точках на границе повреждения; и
модуль оценки параметров и мониторинга, выполненный с возможностью принимать эластографические измерения в качестве обратной связи от системы визуализации и корректировать управляющий сигнал для того, чтобы управлять абляционным устройством для достижения терапевтических целей, на основании эластографических измерений.
7. Система по п. 6, в которой управляющий сигнал выполнен с возможностью корректировать одно или более из настроек мощности абляционного устройства и/или режима работы абляционного устройства.
8. Система по п. 6, в которой эластографические измерения включают в себя оценки времени до пика и параметры визуализации системы визуализации регулируются для поддержания профиля оценки времени до пика.
9. Система по п. 6, в которой обратная связь от системы визуализации включает в себя измерения жесткости из одной или более точек на карте пространственных или временных измерений.
10. Система по п. 9, в которой при корректировке управляющего сигнала используют эластографические измерения из одной или более точек на карте пространственных или временных измерений.
11. Способ абляции, содержащий:
расположение абляционного устройства и ультразвукового зонда в субъекте для того, чтобы начинать абляцию;
генерацию информации об измерениях в качестве обратной связи во время процесса абляции, включая эластографический параметр, причем информация об измерениях включает в себя информацию от по меньшей мере одного из абляционного устройства и ультразвукового зонда;
адаптивное обновление параметров визуализации ультразвукового зонда и управляющего сигнала абляционного устройства в соответствии с обратной связью; и
завершение процесса абляции, когда эластографический параметр соответствует заданному критерию лечения.
12. Способ по п. 11, в котором параметры визуализации включают в себя параметры стимулирования и слежения, включающие в себя одно или более из частоты повторения импульса, числа отслеживаемых местоположений и/или расстояния между следящими пучками.
13. Способ по п. 11, в котором информация об измерениях от абляционного устройства включает в себя одно или более из затраченного времени абляции, накопленной внесенной мощности, температуры кончика абляционного зонда и/или параметра текущей температуры абляционного зубца.
14. Способ по п. 11, дополнительно содержащий отображение соответствующего эластографического параметра применительно к визуализируемому местоположению на дисплее.
15. Способ по п. 11, дополнительно содержащий переопределение параметров визуализации и/или параметров управления абляцией посредством изменений вручную.
| US 2010256530 A1, 07.10.2010 | |||
| US 2010036378 A1, 11.02.2010 | |||
| US 7166075 B2, 23.01.2007 | |||
| CN 103720489 A, 16.04.2014 | |||
| БИПОЛЯРНЫЙ РАДИОЧАСТОТНЫЙ АБЛЯЦИОННЫЙ ИНСТРУМЕНТ | 2010 |
|
RU2499574C2 |

