Изобретение относится к медицине и медицинской технике, в частности к практике и технике эндоскопии органов человека.
Известен контактный датчик давления для исследования полостей, имеющий заполненную газовой средой камеру, предназначенный для определения плотности слизистой оболочки носовых раковин (RU 2240028, 20.11.2004). Датчик подключен к средствам фиксации и обработки данных.
Технические возможности этого устройства не позволяют проводить обследование в глубоких полостях тела.
Известна эндоскопическая система замера биофизических параметров ткани, в которой предусмотрен замер плотности ткани во время внутриполостного медицинского обследования (US 6711429, 23.03.2004), в котором осуществляется замер плотности подлежащей ткани сенсором на торце эндоскопа.
Однако система не позволяет формировать у исследователя эффект, сходный с непосредственным осязанием обследуемой ткани.
Известно устройство для определения вязкоупругих свойств мягких тканей, содержащее цилиндрический корпус, внутри которого установлен вибратор с датчиком силы, соединенные соответственно с генератором сигналов и с элементами обработки и регистрации сигнала силы и смонтированные через опорную площадку с контактным штампом, контактный штамп прикреплен посредством резьбы к опорной площадке и выполнен плоским в торце и с возможностью выступа с торцевой части корпуса (RU 2082312, 28.07.1993).
Недостатком устройства является невозможность сравнения соседних участков исследуемого образца и выявления его неоднородности.
Известен способ и устройство для исследования ткани молочной железы, которое содержит множество датчиков, размещенных на поверхности, контактирующей с исследуемой тканью, каждый из которых измеряет локальное давление, действующее на него со стороны ткани в ответ на силу, с которой врач прижимает устройство к исследуемой ткани. В зависимости от структуры подлежащей ткани изменяется распределение давлений между датчиками, что позволяет после соответствующей обработки сигналов выделить зоны с измененными физическими свойствами (Патент США US 006091981).
Недостатком способа и устройства является отсутствие измерения суммарной силы воздействия на ткань, передачи и отображения тактильной информации на дисплее для восприятия рукой врача при проведении обследования плотности ткани с помощью эндоскопа.
Наиболее близким к заявляемому изобретению является устройство для исследования плотности ткани при эндоскопическом исследовании, содержащее эндоскоп с датчиками плотности ткани, причем датчиками плотности ткани являются датчики давления, выполненные в виде упругих камер, заполненных воспринимающей давление средой, например физиологическим раствором (RU 2286080, 26.01.2005).
Недостаток устройства заключается в отсутствии передачи и воспроизведения тактильного изображения состояния ткани на дисплее для восприятия рукой врача при эндоскопическом обследовании.
Технический результат предлагаемого изобретения заключается в расширении функциональных возможностей устройства для тактильного исследования плотности ткани при эндоскопическом обследовании с организацией передачи и воспроизведения тактильного изображения состояния ткани при эндоскопическом обследовании с отображением тактильной и температурной информации для восприятия рукой врача.
Указанный технический результат достигается тем, что в устройство для тактильного исследования плотности ткани при эндоскопическом обследовании, содержащее эндоскоп с датчиками давления, выполненными в виде упругих камер, дополнительно введены тактильная матрица, состоящая из множества ячеек, выполненных на едином общем основании и содержащих перегородки, экран тактильной матрицы, измерительные усилители температуры и давления, сумматор общего давления, блок индикации величины общего давления, в датчик плотности ткани введен датчик температуры, выполненный в виде терморезистора, причем основание, перегородки и экран тактильной матрицы образуют герметичную камеру, заполненную жидкостью, каждая ячейка тактильной матрицы содержит винт, нагревательный элемент и датчик температуры, усилители нагревательных элементов, формирующие цилиндры, винты, тахометры, усилители электрических двигателей, электрические двигатели, устройства сравнения температуры.
Такое техническое решение расширяет функциональные возможности устройства за счет передачи и отображения тактильной информации и температуры ткани при эндоскопическом обследовании и повышает контрастность предоставления тактильной информации для восприятия рукой врача.
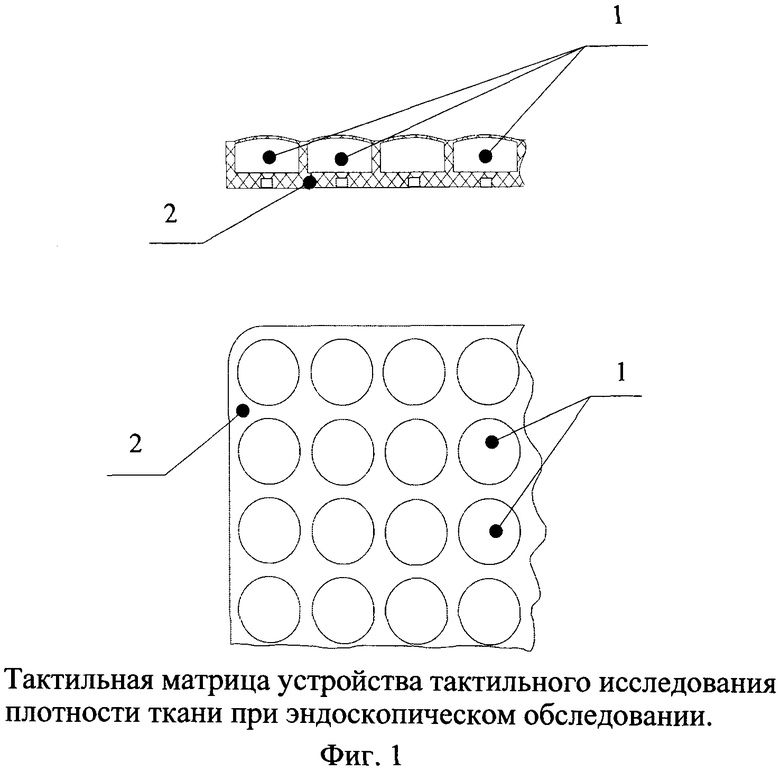
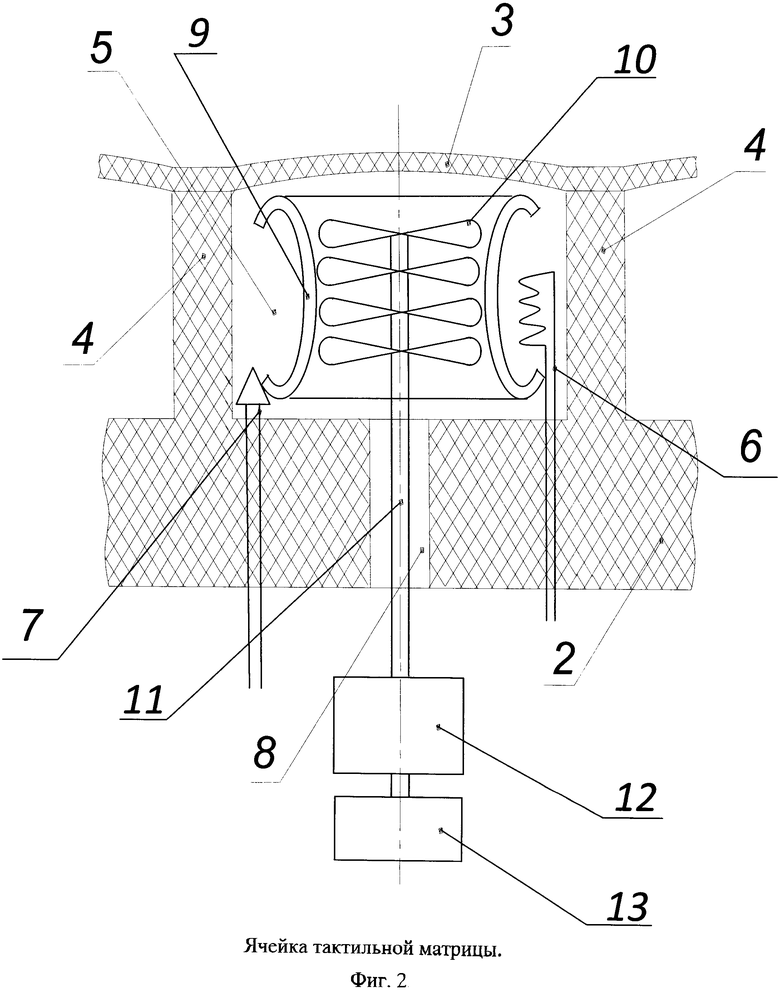
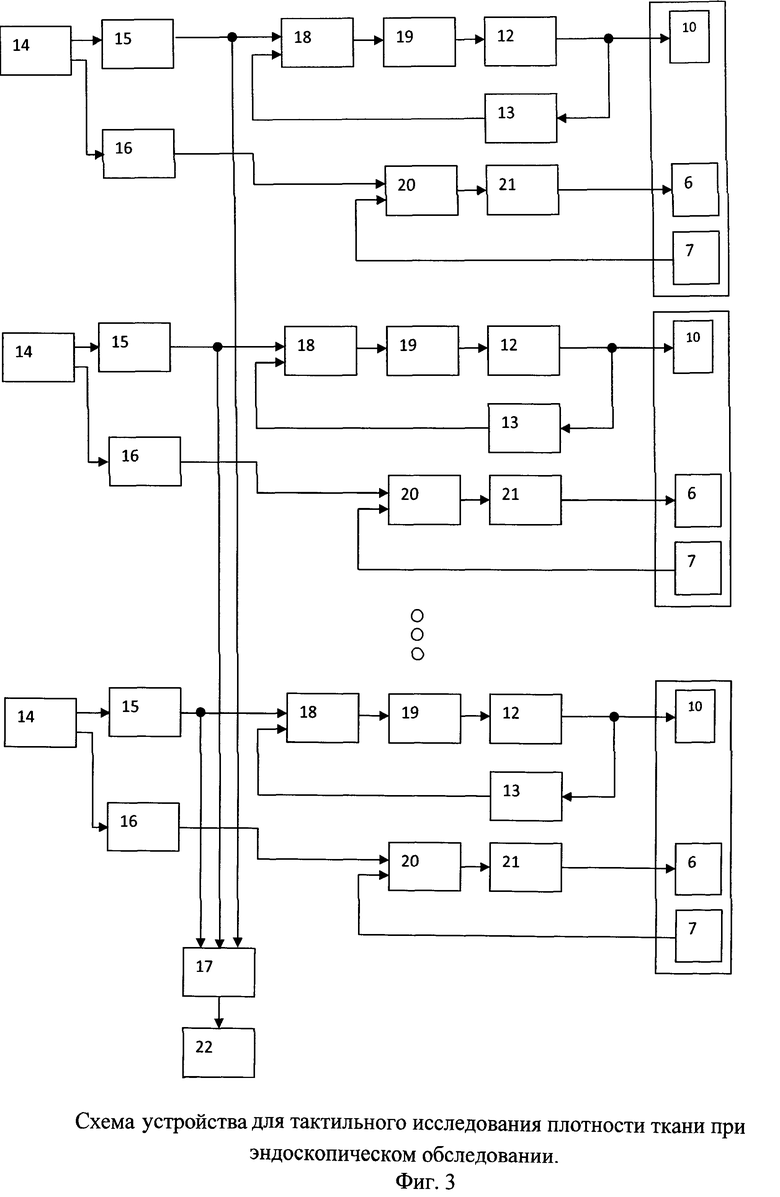
На фиг.1 показана тактильная матрица устройства для тактильного исследования плотности ткани при эндоскопическом обследовании, на фиг.2 - ячейка тактильной матрицы, на фиг.3 - схема устройства для тактильного исследования плотности ткани при эндоскопическом обследовании.
Тактильная матрица устройства (фиг.1) состоит из множества ячеек 1 тактильной матрицы, выполненных на едином общем основании 2 из гибкого материала, возможно резины. Ячейки 1 тактильной матрицы скрыты экраном тактильной матрицы 3 (на фиг.1 не показан).
Ячейка 1 тактильной матрицы (фиг.2) содержит перегородки 4, размещенные на основании тактильной матрицы 2, которые разделяют тактильную матрицу на множество ячеек. Основание тактильной матрицы 2, перегородки 4 и экран тактильной матрицы 3 образуют герметичную камеру, заполненную жидкостью 5. В каждую ячейку 1 подводится нагревательный элемент 6 и датчик температуры 7. В основании тактильной матрицы 2 под каждой ячейкой 1 тактильной матрицы имеются уплотнители 8. В каждой ячейке 1 расположен формирующий цилиндр 9, внутри которого размещен винт 10 на валу 11 электрического двигателя 12, каждый электрический двигатель 12 соединен с тахометром 13.
Количество ячеек 1 тактильной матрицы определяет информационное разрешение устройства. Это количество согласуется с количеством датчиков давления эндоскопа, снимающих информацию о состоянии обследуемой ткани, определяется требованиями к размерам исследуемых образцов и уплотнений, размерами ячеек тактильной матрицы и устройства в целом и может быть различным.
Схема устройства для тактильного исследования плотности ткани при эндоскопическом обследовании (фиг.3) содержит датчики давления и температуры 14 эндоскопа, количество которых должно соответствовать количеству ячеек 1 тактильной матрицы, измерительные усилители давления 15, измерительные усилители температуры 16, сумматор 17 общего давления, устройства сравнения давления 18, усилители электрического двигателя 19, электрические двигатели 12, винты 10, тахометры 13, устройства сравнения температуры 20, усилители нагревательных элементов 21, нагревательные элементы 6, датчики температуры 7, блок индикации 22 величины общего давления.
Устройство работает следующим образом.
В процессе обследовании состояния ткани датчики давления и температуры 14 эндоскопа вырабатывают сигналы, которые отражают плотность и температуру исследуемой биологической ткани. Сигналы плотности усиливаются на измерительных усилителях давления 15, сигналы температуры усиливаются на измерительных усилителях температуры 16. Усиленные сигналы с измерительных усилителей давления 15 подаются на устройства сравнения давления 18 и сумматор 17 общего давления, сигнал от устройства сравнения давления 18 через усилители 19 электрических двигателей подается на электрические двигатели 12, скорость вращения винтов 10 формирует перепад давления в формирующих цилиндрах 9, выходы тахометров 13 соединены со вторыми входами устройств сравнения давления 18. В результате скорость вращения винтов 10 изменяется пропорционально сигналам, подаваемым на устройства сравнения давления 18 с измерительных усилителей давления 15.
Выходы измерительных усилителей температуры 16 соединены с первыми входами устройств сравнения температуры 20, выходы устройств сравнения температуры 20 через усилители нагревательных элементов 21 соединены с входами нагревательных элементов 6, выходы датчиков температуры 7 соединены с вторыми входами устройств сравнения температуры 20. Такое решение обеспечивает поддержание нагревательными элементами 6 температуры жидкости 5 в герметичных камерах, близкой к температуре, измеряемой датчиками давления и температуры 14 эндоскопа.
Таким образом, в каждой ячейке 1 формируются давление и температура, пропорциональные давлению и температуре, полученным от датчиков давления и температуры 14 эндоскопа.
Выход сумматора 17 общего давления подключен к входу блока индикации 22 величины общего давления, на котором отображается значение общего давления прижима всех датчиков давления и температуры 14 эндоскопа к обследуемой ткани. Наблюдая эту величину, врач может регулировать усилие прижатия эндоскопа к исследуемой ткани для более точного выявления ее состояния.
Предложенное техническое решение расширяет функциональные возможности устройства за счет передачи и отображения тактильной и температурной информации о состоянии ткани при эндоскопическом обследовании.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕРЕДАЧИ И ВОСПРОИЗВЕДЕНИЯ ТАКТИЛЬНОГО ИЗОБРАЖЕНИЯ СОСТОЯНИЯ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2009 |
|
RU2425620C2 |
| УСТРОЙСТВО ТАКТИЛЬНОГО ДИСПЛЕЯ ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ | 2011 |
|
RU2488343C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ОТОБРАЖЕНИЯ ТАКТИЛЬНОЙ ИНФОРМАЦИИ ПРИ ЭНДОСКОПИЧЕСКОМ ИССЛЕДОВАНИИ ПЛОТНОСТИ ТКАНИ | 2008 |
|
RU2391891C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391892C2 |
| УСТРОЙСТВО ТАКТИЛЬНОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391893C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ УПРУГОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2012 |
|
RU2515481C1 |
| УСТРОЙСТВО ИССЛЕДОВАНИЯ ПЛОТНОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ | 2009 |
|
RU2440016C2 |
| СПОСОБ СИМУЛЬТАННОЙ ХИРУРГИИ ХРОНИЧЕСКИХ БОЛЕЗНЕЙ НОСА, ОКОЛОНОСОВЫХ ПАЗУХ И ГЛОТКИ У ДЕТЕЙ | 2008 |
|
RU2358669C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2005 |
|
RU2286080C2 |
| Аппарат диагностики камеры сгорания | 2022 |
|
RU2797772C1 |
Изобретение относится к медицинской технике, в частности к практике и технике эндоскопии органов человека. Устройство для тактильного исследования плотности ткани при эндоскопическом обследовании содержит эндоскоп с датчиками плотности ткани, причем датчиками плотности ткани являются датчики давления. Датчики давления выполнены в виде упругих камер, заполненных воспринимающей давление средой. В устройство дополнительно введены тактильная матрица, состоящая из множества ячеек, выполненных на едином общем основании и содержащих перегородки, экран тактильной матрицы, измерительные усилители давления, измерительные усилители температуры, сумматор общего давления, блок индикации величины общего давления. В датчик плотности ткани введен датчик температуры. Основание, перегородки и экран тактильной матрицы образуют герметичную камеру, заполненную жидкостью, а каждая ячейка тактильной матрицы содержит винт, нагревательный элемент и датчик температуры. Применение изобретения позволит расширить функциональные возможности устройства за счет передачи и воспроизведения тактильной и температурной информации о состоянии ткани при эндоскопическом обследовании для восприятия рукой врача. 3 ил.
Устройство для тактильного исследования плотности ткани при эндоскопическом обследовании, содержащее эндоскоп с датчиками плотности ткани, причем датчиками плотности ткани являются датчики давления, выполненные в виде упругих камер, заполненных воспринимающей давление средой, отличающееся тем, что в устройство дополнительно введены тактильная матрица, состоящая из множества ячеек, выполненных на едином общем основании и содержащих перегородки, экран тактильной матрицы, измерительные усилители давления, измерительные усилители температуры, сумматор общего давления, блок индикации величины общего давления, в датчик плотности ткани введен датчик температуры, причем основание, перегородки и экран тактильной матрицы образуют герметичную камеру, заполненную жидкостью, каждая ячейка тактильной матрицы содержит винт, нагревательный элемент и датчик температуры, выход каждого из датчиков давления и температуры эндоскопа через измерительные усилители давления соединен с входами сумматора общего давления и устройствами сравнения давления, выходы которых через усилители электрических двигателей соединены с электрическими двигателями, соединенными с винтами, выходы электрических двигателей соединены с тахометрами, соединенными со вторыми входами устройств сравнения давления, выход каждого из датчиков давления и температуры эндоскопа через измерительные усилители температуры соединен с первыми входами устройств сравнения температуры, выходы которых через усилители нагревательных элементов соединены с входами нагревательных элементов, вторые входы устройств сравнения температуры соединены с датчиками температуры, выход сумматора общего давления соединен с блоком индикации величины общего давления.
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2005 |
|
RU2286080C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391892C2 |
| МАТРИЦА ИНТЕГРАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ДАВЛЕНИЯ | 2007 |
|
RU2362236C1 |
| US 20060142657 A1, 29.06.2006 | |||
| US 20090157059 A1, 18.06.2009 | |||
| ZIEGLER R | |||
| et al | |||
| Haptic display of the VR arthroscopy training simulator | |||
| Proceedings of SPIE - The International Society for Optical Engineering, Volume 3012, 1997, pp.479-486 (реферат на сайте | |||

