Изобретение относится к медицине и медицинской технике, в частности к практике и технике эндоскопии полых органов - желудка, 12-перстной кишки и др., а также других полостей организма (плевральная, брюшная полости, пространство малого таза и пр.).
Известен способ повышения точности обнаружения злокачественных новообразований и определения границ их локализации, при котором проводят осмотр пациента с помощью эндоскопа с подключенными к нему спектральным прибором и видеокамерой, измеряют интенсивности, спектры отражения и флуоресценции нормальных и подозреваемых участков на персональном компьютере и при обнаружении разницы в спектрах и при превышении интенсивности отраженного света от подозреваемого участка ткани по сравнению с нормальным более чем на 25% делают заключение о наличии злокачественного новообразования (RU 2152162, 10.07.2000). Известны гибкие многофункциональные эндоскопы, содержащие оптическую систему из светопроводящих волокон, заключенных в гибкий каркас с возможностью управления рабочей частью, вводимой в обследуемую полость, а также с наличием рабочего канала, предназначенного для подведения и эвакуации жидкости, клея, лазерного светодиода, манипуляторов, в частности, для забора биопсийного материала и с возможностью освещения (Дуоденофиброскоп, TJF-300, наружный d=13,0 мм, канал d=4,2 мм фирмы «Олимпус», Япония, каталог фирмы 2004 г.).
Эти устройства не позволяют проводить исследование подлежащей ткани, находящейся в зоне осмотра, на предмет ее однородности и плотности, так как используют изменение оптических, а не механических свойств тканей.
Недостатком устройства является невозможность сравнения соседних участков исследуемого образца.
Известно устройство для исследования ткани молочной железы (US 6091981, 18.07.2000), которое содержит множество датчиков, размещенных на поверхности, контактирующей с исследуемой тканью, каждый из которых измеряет локальное давление, действующее на него со стороны ткани, в ответ на силу, с которой врач прижимает устройство к исследуемой ткани. В зависимости от структуры подлежащей ткани изменяется распределение давлений между датчиками, что позволяет после соответствующей обработки сигналов выделить зоны с измененными физическими свойствами.
Недостатком устройства является отсутствие измерения перемещения контактной поверхности в направлении ткани и суммарной силы воздействия на ткань, что не позволяет оценить усредненные упруго-пластические свойства биологической ткани.
Наиболее близким к заявляемому изобретению является устройство для исследования плотности ткани при эндоскопическом исследовании (RU 2286080, 27.10.2006), содержащее эндоскоп с датчиками плотности ткани, подключенными к компьютерной системе, причем датчиками плотности ткани являются датчики давления, выполненные в виде упругих камер, заполненных воспринимающей давление средой, например физиологическим раствором, установленные на торце эндоскопа.
Недостаток устройства заключается в отсутствии возможности проводить тактильное обследование плотности биологической ткани эндоскопическим способом с передачей тактильной информации для восприятия рукой врача на рельефном дисплее.
Технический результат предлагаемого изобретения заключается в расширении функциональных возможностей устройства за счет формирования тактильной информации для восприятия рукой врача на рельефном дисплее.
Указанный технический результат обеспечивается тем, что в устройстве тактильного исследования плотности ткани при эндоскопическом обследовании, содержащем эндоскоп с датчиками плотности ткани, являющимися датчиками давления, выполненными в виде упругих камер, заполненных воспринимающей давление средой, и блок обработки и отображения информации в динамическом режиме, последний включает рельефный дисплей, каждый из элементов отображения тактильной информации которого установлен с возможностью перемещения в соответствующем отверстии пластины наборного поля посредством пружинной пластины переменной жесткости соответствующего электромеханического узла перемещения, выход каждого из датчиков давления соединен через его измерительный усилитель с первым входом его блока сравнения с опорным напряжением, блоком сравнения с обратной связью и соответствующим входом сумматора общего давления, при этом выход блока сравнения обратной связи через усилитель мощности соединен с электрическим двигателем соответствующего электромеханического узла перемещения, многооборотный потенциометр которого соединен через преобразователь со вторым входом блока сравнения обратной связи, вторые входы блоков сравнения с опорным напряжением соединены с источником опорного напряжения, а выходы - с элементами индикации равномерности прижатия соответствующих датчиков давления, выход сумматора общего давления соединен с элементом индикации значения общего давления.
Предпочтительно, чтобы электромеханический узел перемещения состоял из основания, на котором помещен электрический двигатель с редуктором, приводящим в движение вал винтовой передачи, установленный с возможностью перемещения ползуна по направляющему валу вдоль основания и контакта его заостренного торца с пружинной пластиной переменной жесткости, консольно закрепленной на одном конце и связанной с элементом отображения тактильной информации - на другом, при этом вал винтовой передачи соединен с многооборотным потенциометром.
Кроме того, пластина наборного поля может быть перекрыта гибкой защитной оболочкой.
В качестве среды, воспринимающей давление, в датчиках давления предпочтительно используется физиологический раствор.
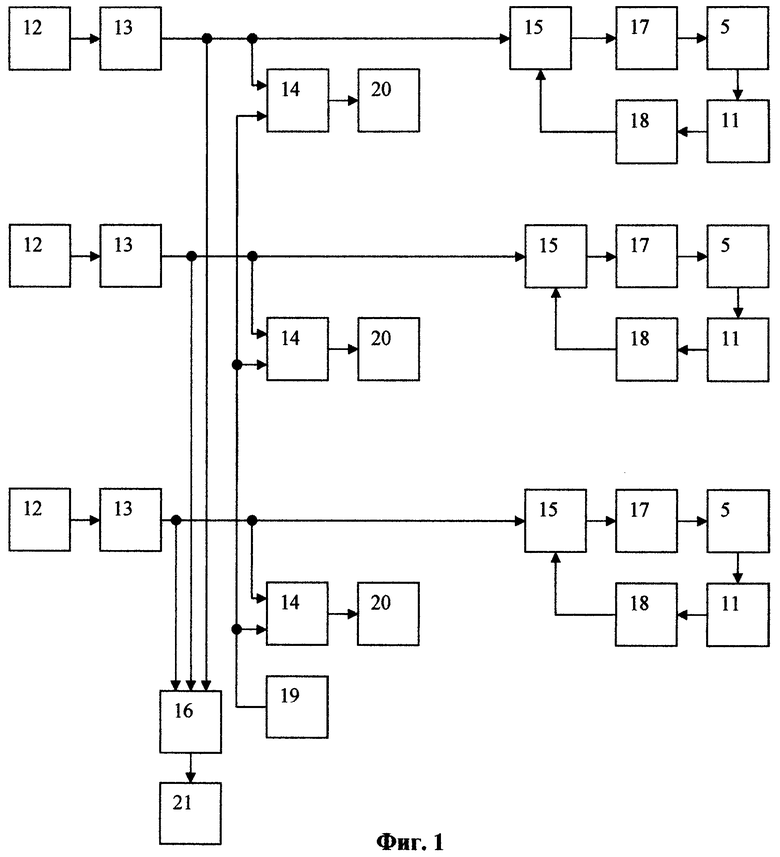
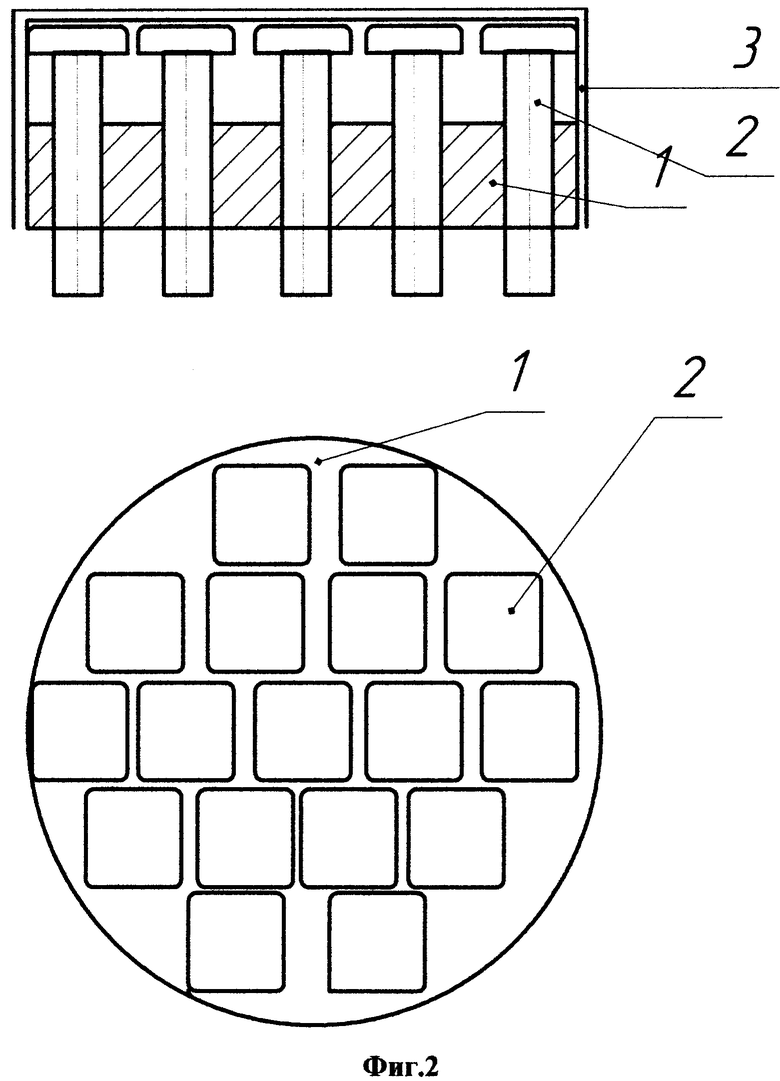
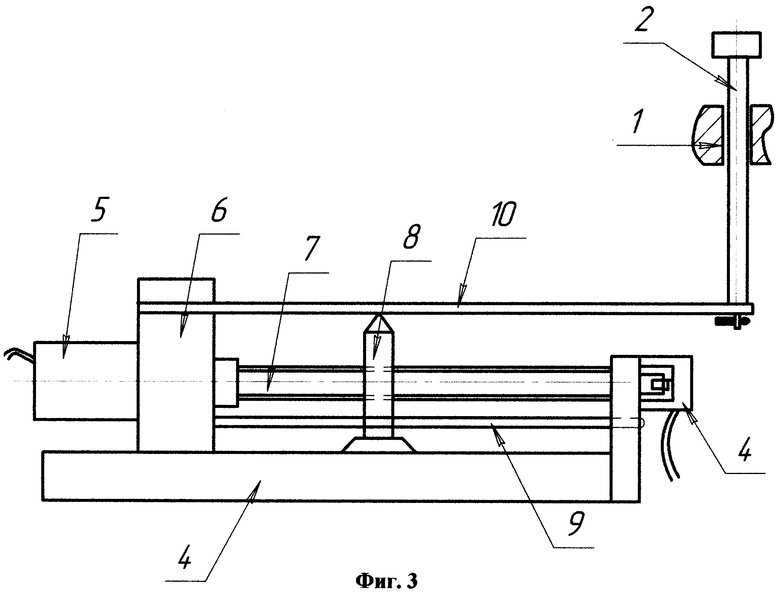
На фиг.1 представлена блок- схема устройства тактильного исследования плотности ткани при эндоскопическом обследовании; на фиг.2 - наборное поле рельефного дисплея тактильной информации; на фиг.3 - электромеханический узел перемещения.
Устройство тактильного исследования (фиг.1) содержит N датчиков давления 12 эндоскопа, выполненных в виде упругих камер, заполненных воспринимающей давление средой, в частности физиологическим раствором. Информация от каждого из датчиков давления 12 через соответствующие элементы электрической схемы и электромеханические узлы перемещения поступает на блок обработки и отображения информации, который включает N элементов отображения тактильной информации 2, перемещающихся в соответствующих отверстиях пластины 1 наборного поля рельефного дисплея тактильной информации (фиг.2). Для удобства эксплуатации рельефный дисплей перекрыт гибкой защитной оболочкой 3. Количество элементов отображения тактильной информации 2 в наборном поле определяет информационное разрешение рельефного дисплея и в предлагаемом устройстве соответствует количеству датчиков давления на эндоскопе.
Сигналы с датчиков давления 12 через N измерительных усилителей 13 подаются на соответствующие N блоков сравнения с опорным напряжением 14, N блоков сравнения с обратной связью 15 и сумматор 16 общего давления. Выходы блоков сравнения обратной связи 15 через усилители мощности 17 соединены с N электрическими двигателями 5 электромеханических узлов перемещения.
Каждый электромеханический узел перемещения (фиг.3) состоит из основания 4, на котором помещен электрический двигатель 5 с редуктором 6, приводящим в движение вал винтовой передачи 7, установленный с возможностью перемещения ползуна 8 по направляющему валу 9 вдоль основания 4. Заостренный торец ползуна 8 контактирует, в частности, он может опираться на нее, с пружинной пластиной 10 переменной жесткости, которая консольно закреплена с одного конца корпуса редуктора. На другом конце пластина 10 связана с элементом отображения тактильной информации 2. Таким образом, жесткость пружинной пластины 10 зависит от положения ползуна 8 на основании 4, что, в свою очередь, определяет ход элементов отображения тактильной информации 2 в отверстиях пластины 1 наборного поля рельефного дисплея. Вал винтовой передачи 9 соединен с многооборотным потенциометром 11.
Значения сопротивлений с N многооборотных потенциометров 11, пропорциональных положению ползунов 8, преобразуются в соответствующие напряжения на N преобразователях 18, которые сравниваются с напряжениями от N измерительных усилителей 13 на N блоках сравнения с обратной связью 15. Вторые входы N блоков сравнения с опорным напряжением 14 соединены с источником опорного напряжения 19. Выходы N блоков сравнения с опорным напряжением 14 соединены с N элементами индикации равномерности прижатия 20 датчиков давления эндоскопа. Выход сумматора 16 общего давления соединен с элементом индикации значения общего давления 21.
Устройство работает следующим образом.
В процессе обследования биологической ткани N датчиков давления 12 эндоскопа вырабатывают сигналы, пропорциональные величинам давлений в каждой камере, которые, в свою очередь, отражают состояние исследуемой биологической ткани. Эти сигналы усиливаются на N измерительных усилителях 13. Сигналы с измерительных усилителей 13 подаются на сумматор 16 общего давлениям, и величина суммарного давления всех датчиков давления 12 эндоскопа отображается на элементе индикации значения общего давления 21. Наблюдая величину суммарного давления, врач может изменять усилия прижатия эндоскопа к исследуемой ткани. Также сигналы с измерительных усилителей 13 подаются на соответствующие блоки сравнения с опорным напряжением 14, где сравниваются с установленным уровнем источника опорного напряжения 19. В результате на элементах индикации равномерности прижатия 20 датчиков давления эндоскопа отображается соотношение между действительным уровнем давления и некоторой установленной начальной величиной, которая является порогом срабатывания каждого отдельного датчика давления 12 эндоскопа. Наблюдая информацию о пороге срабатывая датчиков давления 12, врач может управлять равномерностью прижатия эндоскопа к исследуемой ткани, задействовав при этом все N датчиков давления 12 эндоскопа.
Также сигналы с измерительных усилителей 13 подаются на соответствующие блоки сравнения с обратной связью 15, усилители мощности 17 и электрические двигатели 5, которые через редуктор 6 вращают вал 7 винтовой передачи и перемещают ползун 8 по направляющему валу 9 вдоль основания 4. Ползун 8 перемещается до тех пор, пока напряжение, снимаемое с преобразователей 18, связанных с многооборотными потенциометрами 11, не станет равным напряжению, подаваемому с измерительных усилителей 13, которое пропорционально давлению, воспринимаемому датчиками давления 12 эндоскопа при контакте с исследуемой биологической тканью. В результате на рельефном дисплее отображается величина давления, которое воспринимается рукой человека при нажатии на элементы отображения тактильной информации 2 устройства. Эта величина пропорциональна значениям, снимаемым с датчиков давления эндоскопа.
Такое техническое решение расширяет функциональные возможности устройства и позволяет проводить тактильное обследование плотности биологической ткани эндоскопическим способом с передачей тактильной информации для восприятия рукой врача на рельефном дисплее.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТАКТИЛЬНОГО ДИСПЛЕЯ ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ | 2011 |
|
RU2488343C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ОТОБРАЖЕНИЯ ТАКТИЛЬНОЙ ИНФОРМАЦИИ ПРИ ЭНДОСКОПИЧЕСКОМ ИССЛЕДОВАНИИ ПЛОТНОСТИ ТКАНИ | 2008 |
|
RU2391891C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ВОСПРОИЗВЕДЕНИЯ ТАКТИЛЬНОГО ИЗОБРАЖЕНИЯ СОСТОЯНИЯ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2009 |
|
RU2425620C2 |
| УСТРОЙСТВО ДЛЯ ТАКТИЛЬНОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2011 |
|
RU2479245C2 |
| УСТРОЙСТВО ТАКТИЛЬНОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391893C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ УПРУГОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2012 |
|
RU2515481C1 |
| УСТРОЙСТВО ТАКТИЛЬНОЙ ИНДИКАЦИИ | 1991 |
|
RU2030790C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПЛОТНОСТИ И НЕОДНОРОДНОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ | 2005 |
|
RU2299011C2 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ, ОПТОВОЛОКОННОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ДИАГНОСТИКИ БИОТКАНИ IN VIVO | 1998 |
|
RU2148378C1 |
Изобретение относится к медицине. Устройство содержит эндоскоп с датчиками плотности ткани, являющимися датчиками давления, выполненными в виде упругих камер, заполненных воспринимающей давление средой, и блок обработки и отображения информации в динамическом режиме. Блок обработки и отображения информации включает рельефный дисплей, каждый из элементов отображения тактильной информации которого установлен с возможностью перемещения в соответствующем отверстии пластины наборного поля посредством пружинной пластины переменной жесткости соответствующего электромеханического узла перемещения. Выход каждого из датчиков давления соединен через его измерительный усилитель с первым входом его блока сравнения с опорным напряжением, блоком сравнения с обратной связью и соответствующим входом сумматора общего давления. Выход блока сравнения обратной связи через усилитель мощности соединен с электрическим двигателем соответствующего электромеханического узла перемещения, многооборотный потенциометр которого соединен через преобразователь со вторым входом блока сравнения обратной связи, вторые входы блоков сравнения с опорным напряжением соединены с источником опорного напряжения, а выходы - с элементами индикации равномерности прижатия соответствующих датчиков давления, выход сумматора общего давления соединен с элементом индикации значения общего давления. Кроме того, электромеханический узел перемещения состоит из основания, на котором помещен электрический двигатель с редуктором, приводящим в движение вал винтовой передачи, установленный с возможностью перемещения ползуна по направляющему валу вдоль основания и контакта его заостренного торца с пружинной пластиной переменной жесткости, консольно закрепленной на одном конце и связанной с элементом отображения тактильной информации - на другом. Такое техническое решение расширяет функциональные возможности устройства и позволяет проводить тактильное обследование плотности биологической ткани эндоскопическим способом с передачей тактильной информации для восприятия рукой врача на рельефном дисплее. 3 з.п. ф-лы, 3 ил.
1. Устройство тактильного исследования плотности ткани при эндоскопическом обследовании, содержащее эндоскоп с датчиками плотности ткани, являющимися датчиками давления, выполненными в виде упругих камер, заполненных воспринимающей давление средой, и блок обработки и отображения информации в динамическом режиме, отличающееся тем, что блок обработки и отображения информации включает рельефный дисплей, каждый из элементов отображения тактильной информации которого установлен с возможностью перемещения в соответствующем отверстии пластины наборного поля посредством пружинной пластины переменной жесткости соответствующего электромеханического узла перемещения, выход каждого из датчиков давления соединен через его измерительный усилитель с первым входом его блока сравнения с опорным напряжением, блоком сравнения с обратной связью и соответствующим входом сумматора общего давления, при этом выход блока сравнения обратной связи через усилитель мощности соединен с электрическим двигателем соответствующего электромеханического узла перемещения, многооборотный потенциометр которого соединен через преобразователь со вторым входом блока сравнения обратной связи, вторые входы блоков сравнения с опорным напряжением соединены с источником опорного напряжения, а выходы - с элементами индикации равномерности прижатия соответствующих датчиков давления, выход сумматора общего давления соединен с элементом индикации значения общего давления.
2. Устройство по п.1, отличающееся тем, что электромеханический узел перемещения состоит из основания, на котором помещен электрический двигатель с редуктором, приводящим в движение вал винтовой передачи, установленный с возможностью перемещения ползуна по направляющему валу вдоль основания и - контакта его заостренного торца с пружинной пластиной переменной жесткости, консольно закрепленной на одном конце и связанной с элементом отображения тактильной информации на другом, при этом вал винтовой передачи соединен с многооборотным потенциометром.
3. Устройство по п.1 или 2, отличающееся тем, что пластина наборного поля перекрыта гибкой защитной оболочкой.
4. Устройство по п.1, отличающееся тем, что в качестве среды, воспринимающей давление, используется физиологический раствор.
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2005 |
|
RU2286080C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА ТКАНИ И АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1995 |
|
RU2138192C1 |
| US 2004267165, 30.12.2004 | |||
| US 5339799, 29.10.1992 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПОЛУЧЕНИЯ СПИРО-[2-ОКСО-4,6-ДИФЕНИЛ- ГЕКСАГИДРОПИРИМИДИН-5,5'-БАРБИТУРОВОЙ КИСЛОТЫ] | 0 |
|
SU218893A1 |
| US 2004254503, 16.12.2004 | |||
| САДОВНИЧИЙ В.А | |||
| и др | |||
| Искусственный тактильный механорецептор | |||
| Теория, опыт создания, экспериментальная апробация | |||
| Ж.: Технология живых систем, № 4 и 5, 2005, с.8-15. | |||

