Изобретение относится к медицинской технике, в частности к практике и технике эндоскопии различных органов человека.
Известен контактный датчик давления для исследования полостей, имеющий заполненную газовой средой камеру, предназначенный для определения плотности слизистой оболочки носовых раковин (RU 2240028, 20.11.2004). Датчик подключен к средствам фиксации и обработки данных.
Технические возможности этого устройства не позволяют проводить обследование в глубоких полостях тела.
Известна эндоскопическая система замера биофизических параметров ткани, в которой предусмотрен замер плотности ткани во время внутриполостного медицинского обследования (US 6711429, 23.03.2004), в котором осуществляется замер плотности подлежащей ткани сенсором на торце эндоскопа.
Однако система не позволяет формировать у исследователя эффект, сходный с непосредственным осязанием исследуемого объекта.
Известно устройство для определения вязкоупругих свойств мягких тканей, содержащее цилиндрический корпус, внутри которого установлен вибратор с датчиком силы, соединенные соответственно с генератором сигналов и с элементами обработки и регистрации сигнала силы и смонтированные через опорную площадку с контактным штампом, контактный штамп прикреплен посредством резьбы к опорной площадке и выполнен плоским в торце и с возможностью выступа с торцевой части корпуса (RU 2082312, 28.07.1993).
Недостатком устройства является невозможность сравнения соседних участков исследуемого образца.
Известен способ и устройство для исследования ткани молочной железы, которое содержит множество датчиков, размещенных на поверхности, контактирующей с исследуемой тканью, каждый из которых измеряет локальное давление, действующее на него со стороны ткани в ответ на силу, с которой врач прижимает устройство к исследуемой ткани. В зависимости от структуры подлежащей ткани изменяется распределение давлений между датчиками, что позволяет после соответствующей обработки сигналов выделить зоны с измененными физическими свойствами (US 6091981, 18.07.2000).
Недостатком способа и устройства является отсутствие измерения перемещения контактной поверхности в направлении ткани и суммарной силы воздействия на ткань, что не позволяет оценить усредненные упругопластические свойства биологической ткани.
Известен способ и устройство оценки плотности и неоднородности биологической ткани, состоящий в механическом воздействии контактирующим элементом на образец ткани, определении датчиками давления изменения давления ткани образца во времени за счет ее деформации, регистрации перемещения контактирующего элемента и обработке регистрируемой информации, причем в качестве контактирующего элемента используют тактильный датчик с множеством герметичных камер, при регистрации учитывают показания датчиков давления об изменении давления в полостях камер тактильного датчика во времени и суммарную силу воздействия на образец, а при обработке информации вычисляют отношение величины суммарной силы воздействия к величине перемещения тактильного датчика, усредненное по времени значение вычисленного отношения оценивают как усредненное значение плотности биологической ткани образца, а по усредненному по времени значению дисперсии показаний датчиков давления оценивают неоднородность ткани. Устройство содержит контактирующий элемент, выполненный с возможностью его перемещения, датчики давления и устройство обработки информации, неподвижное основание для размещения образца ткани, тензометрический силоизмерительный датчик, усилитель, систему управления, сервопривод для обеспечения перемещения контактирующего элемента, причем контактирующий элемент выполнен в виде тактильного датчика, содержащего множество герметичных камер, заполненных воспринимающей давление средой, пространство между которыми заполнено эластичным материалом, камеры тактильного датчика соединены с датчиками давления, при этом выходной вал сервопривода через кривошипно-шатунную передачу соединен с подвижным концом рычага, другой конец которого шарнирно соединен с неподвижным основанием, к подвижному концу рычага жестко прикреплены тензометрический силоизмерительный датчик и тактильный датчик, причем датчики давления и тензометрический силоизмерительный датчики через усилитель и систему управления связаны с устройством обработки информации (RU 2299011, 20.10.2006).
Недостаток способа и устройства состоит в ограничении функциональных возможностей при тактильном обследовании плотности биологической ткани эндоскопическим способом посредством передачи тактильной информации на рельефный дисплей для ее восприятия рукой врача.
Наиболее близким к заявляемому изобретению является устройство для исследования плотности ткани при эндоскопическом исследовании, содержащее эндоскоп с датчиками плотности ткани, подключенными к компьютерной системе, причем датчиками плотности ткани являются датчики давления, выполненные в виде упругих камер, заполненных воспринимающей давление средой, например физиологическим раствором, установленные на торце эндоскопа (RU 2286080, 27.10.2006).
Недостаток устройства заключается в отсутствии возможности передачи тактильной информации для восприятия рукой врача на рельефном дисплее при тактильном обследовании плотности биологической ткани эндоскопическим способом.
Технический результат, достигаемый изобретением, заключается в расширении функциональных возможностей устройства с передачей тактильной информации на рельефный дисплей и ее отображением для восприятия рукой врача при тактильном обследовании плотности биологической ткани эндоскопическим способом.
Технический результат достигается тем, что в устройстве передачи и отображения тактильной информации при эндоскопическом исследовании плотности ткани, содержащем эндоскоп с датчиками плотности ткани, являющимися датчиками давления эндоскопа, выполненными в виде упругих камер, заполненных воспринимающей давление средой, и блок обработки и отображения информации в динамическом режиме, последний включает дисплей отображения тактильной информации, состоящий из основания, в ячейках которого закреплены элементы отображения тактильной информации, каждый из элементов отображения состоит из полого корпуса, перекрытого в верхней части тонкой гибкой пленкой, а в нижней части - имеющего вводы трубки подачи сжатого воздуха, через впускной клапан связанной с магистралью сжатого воздуха, трубки отвода воздуха, через выпускной клапан связанной с атмосферой, и трубки датчика давления элемента отображения, выходы датчиков давления эндоскопа через соответствующие измерительные усилители и усилители с регулируемым коэффициентом передачи соединены с первыми входами блоков управления впускными клапанами и блоков управления выпускными клапанами, вторые входы которых соединены с датчиками давления элементов отображения, входы регулирования коэффициента передачи усилителей с регулируемым коэффициентом передачи соединены с задатчиком коэффициента передачи, выходы измерительных усилителей соединены с входами сумматора общего давления, выход которого подключен к первым входам блоков сравнения верхнего и нижнего давления, вторые входы блоков сравнения верхнего и нижнего давлений соединены с задатчиками верхнего и нижнего давлений соответственно, а выходы блоков сравнения верхнего и нижнего давлений соединены с индикаторами верхнего и нижнего давлений.
Тонкая гибкая пленка, перекрывающая верхнюю часть полого корпуса элемента отображения тактильной информации, может быть выполнена из латекса.
Такое техническое решение расширяет функциональные возможности устройства и позволяет передавать тактильную информацию на рельефный дисплей для восприятия рукой врача при тактильном обследовании плотности биологической ткани эндоскопическим способом.
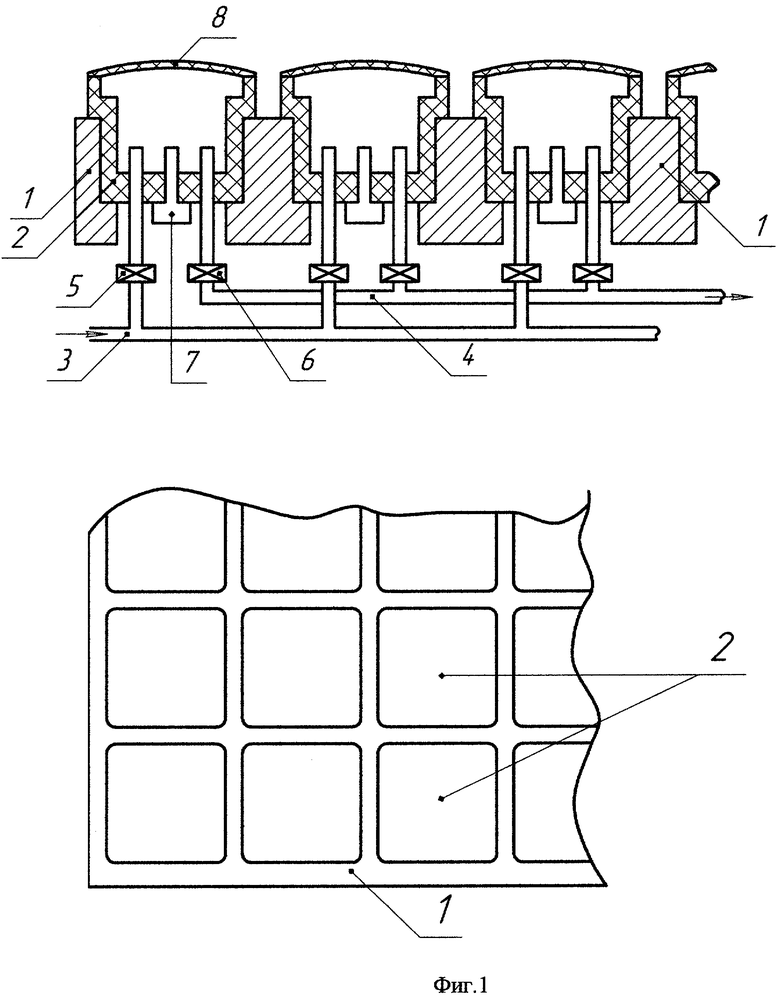
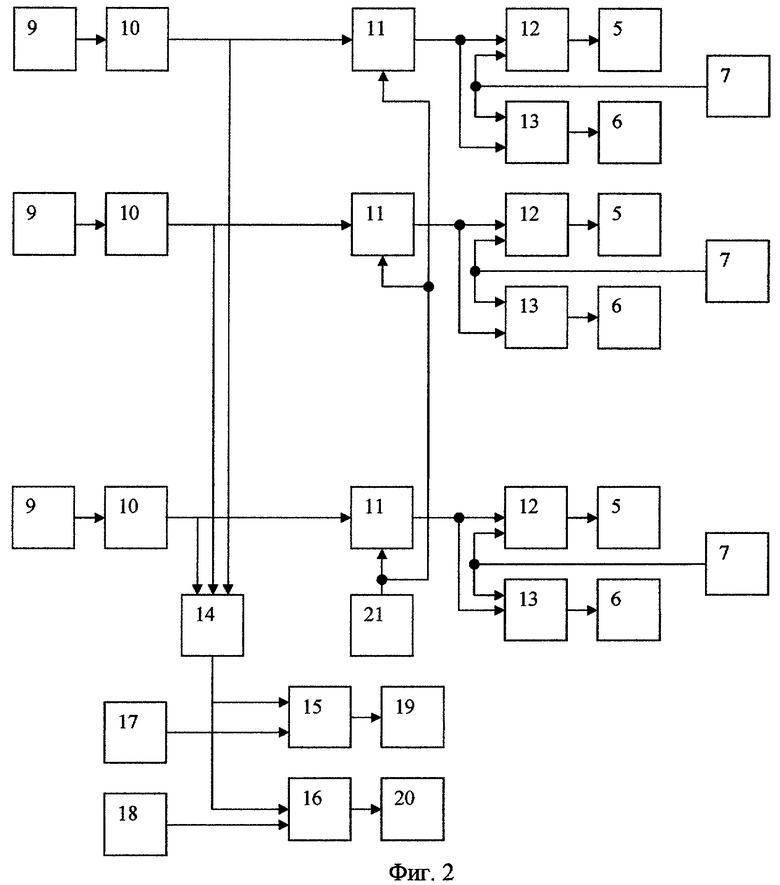
На фиг.1 показан дисплей отображения тактильной информации, на фиг.2 приведена блок-схема устройства передачи и отображения тактильной информации при эндоскопическом исследовании плотности ткани.
Дисплей отображения тактильной информации (фиг.1.) содержит основание дисплея 1, в котором выполнены ячейки, в каждую из которых вставлены элементы отображения тактильной информации 2, закрепленные на основании 1, причем количество элементов 2 определяет разрешающую способность дисплея отображения. Элемент отображения тактильной информации представляет собой полый корпус, верхняя часть которого перекрыта тонкой гибкой пленкой 8, через которую тактильная информация воспринимается рукой врача. В нижней части корпуса в полость введены трубка подачи 3 сжатого воздуха, трубка отвода 4 воздуха и трубка датчика давления 7 элемента отображения, причем трубка подачи сжатого воздуха 3 через впускной клапан связана с магистралью сжатого воздуха, а трубка отвода воздуха через выпускной клапан связана с атмосферой.
Блок-схема устройства передачи и отображения тактильной информации (фиг.2) содержит N датчиков давления 9 эндоскопа, где N - количество элементов 2 отображения тактильной информации, N измерительных усилителей 10, N усилителей с регулируемым коэффициентом передачи 11, N блоков управления 12 впускными клапанами 5, N блоков управления 13 выпускными клапанами 6 и N датчиков давления 7 элементов 2 отображения тактильной информации, сумматор 14 общего давления, блок сравнения верхнего давления 15, блок сравнения нижнего давления 16, задатчик верхнего давления 17, задатчик нижнего давления 18, индикатор верхнего давления 19, индикатор нижнего давления 20, задатчик коэффициента передачи 21 усилителей.
Выходы датчиков давления 9 эндоскопа через измерительные усилители 10 и усилители с регулируемым коэффициентом передачи 11 соединены с первыми входами блоков управления 12 впускными клапанами 5 и блоков управления 13 выпускными клапанами 6, вторые входы которых соединены с датчиками давления 7 элементов отображения, входы регулирования коэффициента передачи усилителей с регулируемым коэффициентом передачи 11 соединены с задатчиком коэффициента передачи 21, выходы измерительных усилителей 10 соединены со входами сумматора 14 общего давления, выход которого подключен к первым входам блоков сравнения верхнего 15 и нижнего 16 давления, вторые входы блоков сравнения верхнего 15 и нижнего 16 давления соединены с задатчиками верхнего 17 и нижнего 18 давления соответственно, а выходы блоков сравнения верхнего 15 и нижнего 16 давления соединены с индикаторами верхнего 19 и нижнего 20 давления.
Устройство работает следующим образом.
В процессе обследования плотности ткани эндоскопическим методом датчики давления 9 эндоскопа прижимаются к биологической ткани и на выходах соединенных с ними измерительных усилителях 10 формируются значения электрических напряжений, пропорциональных возникающим давлениям в датчиках давления 9 эндоскопа. Эти значения зависят от неоднородности и наличия включений в исследуемой биологической ткани. Напряжения с входов измерительных усилителей 10 суммируются на сумматоре 14 общего давления, на выходе которого формируется напряжение, пропорциональное величине силы прижатия датчиков давления 9 эндоскопа к исследуемой ткани. С помощью задатчиков верхнего 17 и нижнего 18 давлений и блоков сравнения верхнего 15 и нижнего 16 давлений формируются сигналы управления индикаторами верхнего 19 и нижнего 20 давлений. В случае недостаточного прижима датчиков давления 9 эндоскопа к биологической ткани загорается индикатор нижнего давления 20, а в случае избыточного прижима - загорается индикатор верхнего давления 19. Величины нижнего и верхнего давлений зависят от исследуемой ткани и устанавливаются задатчиком верхнего давления 17 и задатчиком нижнего давления 18.
Усилители с регулируемым коэффициентом передачи 11 предназначены для пропорционального увеличения или уменьшения давлений в элементах 2 отображения тактильной информации дисплея по отношению к давлениям, возникающим в датчиках давлений 9 эндоскопа. Этим достигается повышение чувствительности устройства передачи и отображения тактильной информации при исследовании плотности ткани эндоскопическим методом и появляется возможность подстройки устройства под чувствительность пальцев руки врача.
Датчики давления 7 элементов отображения, блоки управления 12 впускными клапанами 5 и блоки управления 13 выпускными клапанами 6 обеспечивают поддержание в ячейках 2 отображения тактильной информации величины давления, пропорционального значениям соответствующих напряжений на выходах усилителей с регулируемым коэффициентом передачи 11. Для получения требуемого давления сжатый воздух в элементы 2 отображения тактильной информации поступает по магистрали сжатого воздуха от компрессора (на фиг.1 не показан) по трубкам подачи 3 сжатого воздуха через впускные клапаны 5. Сброс излишнего воздуха обеспечивается выпускными клапанами 6 через трубки отвода 4 воздуха.
Такое техническое решение расширяет функциональные возможности устройства и позволяет передавать тактильную информацию на рельефный дисплей для восприятия рукой врача при тактильном обследовании плотности биологической ткани эндоскопическим способом. Кроме того, устройство позволяет врачу управлять силой прижима эндоскопа к исследуемой ткани, наблюдая за индикаторами нижнего и верхнего давлений. Введение в устройство усилителей с регулируемым коэффициентом передачи позволяет подстраивать дисплей отображения тактильной информации под чувствительность пальцев руки врача.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТАКТИЛЬНОГО ДИСПЛЕЯ ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ | 2011 |
|
RU2488343C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391892C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ВОСПРОИЗВЕДЕНИЯ ТАКТИЛЬНОГО ИЗОБРАЖЕНИЯ СОСТОЯНИЯ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2009 |
|
RU2425620C2 |
| УСТРОЙСТВО ДЛЯ ТАКТИЛЬНОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2011 |
|
RU2479245C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ УПРУГОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2012 |
|
RU2515481C1 |
| УСТРОЙСТВО ТАКТИЛЬНОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391893C2 |
| СИСТЕМА ДИСТАНЦИОННОЙ ДИАГНОСТИКИ СОСТОЯНИЯ ПЛОДА | 2008 |
|
RU2386389C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ, ДАТЧИК ФАЗ ДЫХАНИЯ ДЛЯ УСТРОЙСТВА ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ И СПОСОБ ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ | 1992 |
|
RU2049425C1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕННОЙ ВИЗУАЛИЗАЦИИ ПРИ ЭНДОСКОПИЧЕСКИХ ПРОЦЕДУРАХ | 2018 |
|
RU2782402C2 |
| Эндоскоп с системой управления | 2022 |
|
RU2791385C1 |
Изобретение относится к медицинской технике. Устройство содержит эндоскоп с датчиками плотности ткани, являющимися датчиками давления эндоскопа, выполненными в виде упругих камер, заполненных воспринимающей давление средой, и блок обработки и отображения информации в динамическом режиме, который включает дисплей отображения тактильной информации, состоящий из основания, в ячейках которого закреплены элементы отображения тактильной информации. Каждый из элементов отображения состоит из полого корпуса, перекрытого в верхней части тонкой гибкой пленкой, а в нижней части - имеющего вводы трубки подачи сжатого воздуха, через впускной клапан связанной с магистралью сжатого воздуха, трубки отвода воздуха, через выпускной клапан связанной с атмосферой, и трубки датчика давления элемента отображения. Выходы датчиков давления эндоскопа через соответствующие измерительные усилители и усилители с регулируемым коэффициентом передачи соединены с первыми входами блоков управления впускными клапанами и блоков управления выпускными клапанами, вторые входы которых соединены с датчиками давления элементов отображения, входы регулирования коэффициента передачи усилителей с регулируемым коэффициентом передачи соединены с задатчиком коэффициента передачи, выходы измерительных усилителей соединены с входами сумматора общего давления, выход которого подключен к первым входам блоков сравнения верхнего и нижнего давления, вторые входы блоков сравнения верхнего и нижнего давлений соединены с задатчиками верхнего и нижнего давлений соответственно, а выходы блоков сравнения верхнего и нижнего давлений соединены с индикаторами верхнего и нижнего давлений. Изобретение позволяет передавать тактильную информацию на дисплей для восприятия рукой врача при тактильном обследовании биологической ткани эндоскопическим способом. 1 з.п. ф-лы, 2 ил.
1. Устройство передачи и отображения тактильной информации при эндоскопическом исследовании плотности ткани, содержащее эндоскоп с датчиками плотности ткани, являющимися датчиками давления эндоскопа, выполненными в виде упругих камер, заполненных воспринимающей давление средой, и блок обработки и отображения информации в динамическом режиме, отличающееся тем, что блок обработки и отображения информации включает дисплей отображения тактильной информации, состоящий из основания, в ячейках которого закреплены элементы отображения тактильной информации, каждый из элементов отображения состоит из полого корпуса, перекрытого в верхней части тонкой гибкой пленкой, а в нижней части имеющего вводы трубки подачи сжатого воздуха, через впускной клапан связанной с магистралью сжатого воздуха, трубки отвода воздуха, через выпускной клапан связанной с атмосферой, и трубки датчика давления элемента отображения, выходы датчиков давления эндоскопа через соответствующие измерительные усилители и усилители с регулируемым коэффициентом передачи соединены с первыми входами блоков управления впускными клапанами и блоков управления выпускными клапанами, вторые входы которых соединены с датчиками давления элементов отображения, входы регулирования коэффициента передачи усилителей с регулируемым коэффициентом передачи соединены с задатчиком коэффициента передачи, выходы измерительных усилителей соединены с входами сумматора общего давления, выход которого подключен к первым входам блоков сравнения верхнего и нижнего давлений, вторые входы блоков сравнения верхнего и нижнего давлений соединены с задатчиками верхнего и нижнего давлений соответственно, а выходы блоков сравнения верхнего и нижнего давлений соединены с индикаторами верхнего и нижнего давлений.
2. Устройство по п.1, отличающееся тем, что тонкая гибкая пленка, перекрывающая верхнюю часть полого корпуса элемента отображения тактильной информации, выполнена из латекса.
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2005 |
|
RU2286080C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА ТКАНИ И АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1995 |
|
RU2138192C1 |
| US 2004267165, 30.12.2004 | |||
| US 5339799, 29.10.1992 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПОЛУЧЕНИЯ СПИРО-[2-ОКСО-4,6-ДИФЕНИЛ- ГЕКСАГИДРОПИРИМИДИН-5,5'-БАРБИТУРОВОЙ КИСЛОТЫ] | 0 |
|
SU218893A1 |
| US 2004254503, 16.12.2004 | |||
| САДОВНИЧИЙ В.А | |||
| и др | |||
| Искусственный тактильный механорецептор | |||
| Теория, опыт создания, экспериментальная апробация | |||
| Ж.: Технология живых систем, №4, 5, 2005, с.8-15. | |||

