Изобретение относится к медицине и медицинской технике, в частности к практике и технике эндоскопии органов человека.
Известен контактный датчик давления для исследования полостей, имеющий заполненную газовой средой камеру, предназначенный для определения плотности слизистой оболочки носовых раковин (RU 2240028, 20.11.2004). Датчик подключен к средствам фиксации и обработки данных.
Технические возможности этого устройства не позволяют проводить обследование в глубоких полостях тела.
Известна эндоскопическая система замера биофизических параметров ткани, в которой предусмотрен замер плотности ткани во время внутриполостного медицинского обследования (US 6711429, 23.03.2004), в котором осуществляется замер плотности подлежащей ткани сенсором на торце эндоскопа.
Однако система не позволяет формировать у исследователя эффект, сходный с непосредственным осязанием обследуемой ткани.
Известно устройство для определения вязкоупругих свойств мягких тканей, содержащее цилиндрический корпус, внутри которого установлен вибратор с датчиком силы, соединенные соответственно с генератором сигналов и с элементами обработки и регистрации сигнала силы и смонтированные через опорную площадку с контактным штампом, контактный штамп прикреплен посредством резьбы к опорной площадке и выполнен плоским в торце и с возможностью выступа с торцевой части корпуса (RU 2082312, 28.07.1993).
Недостатком устройства является невозможность сравнения соседних участков исследуемого образца и выявления его неоднородности.
Известны способ и устройство для исследования ткани молочной железы, которое содержит множество датчиков, размещенных на поверхности, контактирующей с исследуемой тканью, каждый из которых измеряет локальное давление, действующее на него со стороны ткани в ответ на силу, с которой врач прижимает устройство к исследуемой ткани. В зависимости от структуры подлежащей ткани изменяется распределение давлений между датчиками, что позволяет после соответствующей обработки сигналов выделить зоны с измененными физическими свойствами (Патент US 006091981).
Недостатком способа и устройства является отсутствие измерения суммарной силы воздействия на ткань, передачи и отображения тактильной информации на дисплее для восприятия рукой врача при проведении обследования плотности ткани с помощью эндоскопа.
Наиболее близким к заявляемому изобретению является устройство для исследования плотности ткани при эндоскопическом исследовании, содержащее эндоскоп с датчиками плотности ткани, причем датчиками плотности ткани являются датчики давления, выполненные в виде упругих камер, заполненных воспринимающей давление средой, например физиологическим раствором (RU 2286080, 26.01.2005).
Недостаток устройства заключается в отсутствии передачи и воспроизведения тактильного изображения состояния ткани на дисплее для восприятия рукой врача при эндоскопическом обследовании.
Задачей изобретения является расширение функциональных возможностей устройства передачи и воспроизведения тактильного изображения состояния ткани при эндоскопическом обследовании с отображением тактильной информации для восприятия рукой врача.
Поставленная задача достигается тем, что в устройство передачи и воспроизведения тактильного изображения состояния ткани при эндоскопическом обследовании, содержащее эндоскоп с датчиками плотности ткани, причем датчиками плотности ткани являются датчики давления, выполненные в виде упругих камер, дополнительно введены тактильная матрица, состоящая из множества ячеек, выполненных на едином общем основании и содержащих перегородки, в которые встроены ферромагнитные разделительные вставки, экран тактильной матрицы, матрица управления, состоящая из множества ячеек, размещенных на общем основании и содержащих сердечники, на которых размещены обмотки, измерительные усилители, входной коммутатор, первый и второй усилители с регулируемым коэффициентом усиления, первый и второй перемножители, сумматор управляющего сигнала, сумматор общего давления, блок индикации величины общего давления, регулятор уровня общего давления, регулятор контрастности, выходной коммутатор, блок синхронизации, ячейки памяти выходных сигналов, причем основание, перегородки и экран тактильной матрицы образуют герметичную камеру, заполненную магнитной жидкостью, тактильная матрица соединена с матрицей управления посредством центрирующих углублений под каждой ячейкой в основании тактильной матрицы и выступов сердечников ячеек матрицы управления.
Такое техническое решение расширяет функциональные возможности устройства за счет передачи и отображения тактильной информации о состоянии ткани при эндоскопическом обследовании и повышает контрастность предоставления тактильной информации для восприятия рукой врача.
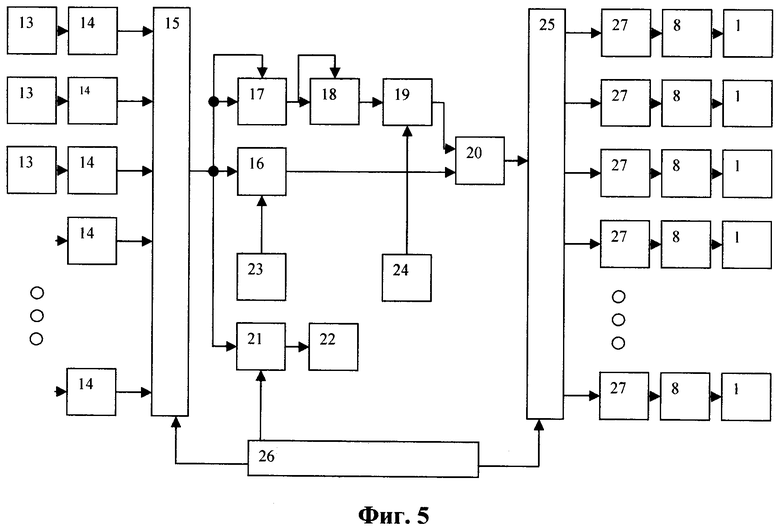
На фиг.1 показана тактильная матрица устройства, на фиг.2 - ячейка тактильной матрицы, на фиг.3 - матрица управления, на фиг.4 - ячейка матрицы управления, на фиг.5 - схема устройства передачи и воспроизведения тактильного изображения состояния ткани при эндоскопическом обследовании.
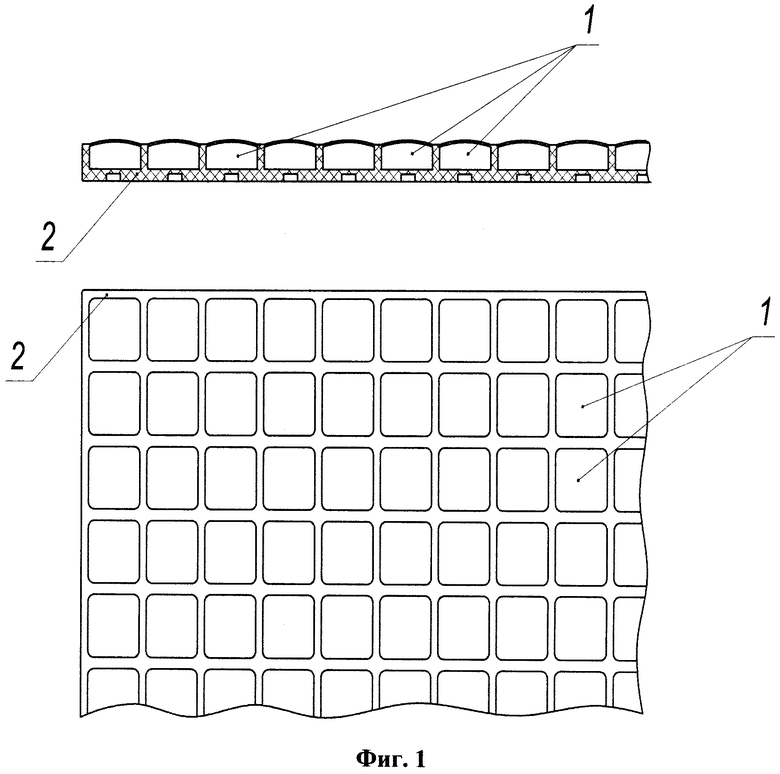
Тактильная матрица устройства (фиг.1) состоит из множества ячеек 1 тактильной матрицы, выполненных на едином общем основании 2 из гибкого материала, возможно резины. Ячейки 1 тактильной матрицы скрыты экраном тактильной матрицы 3 (на фиг.1 не показан).
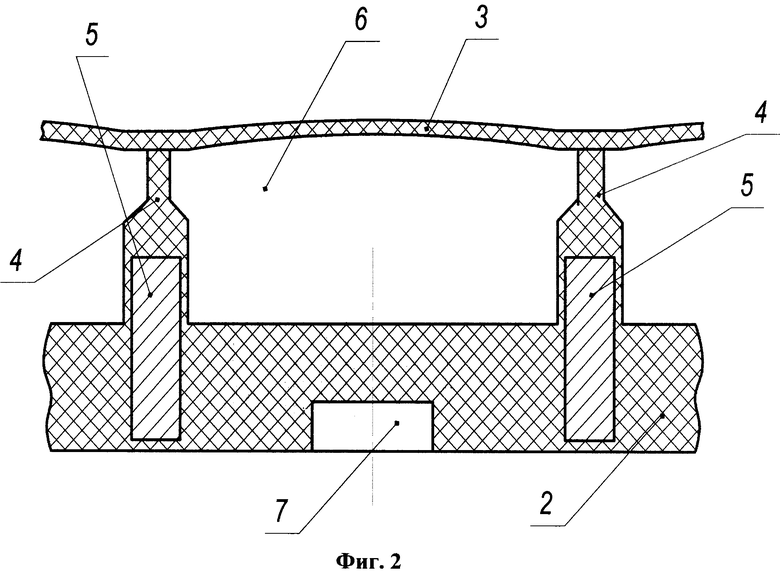
Ячейка 1 тактильной матрицы (фиг.2) содержит перегородки 4, размещенные на основании тактильной матрицы 2, которые разделяют тактильную матрицу на множество ячеек. В перегородки встроены ферромагнитные разделительные вставки 5, которые являются магнитными экранами для уменьшения взаимного влияния соседних ячеек. Основание тактильной матрицы 2, перегородки 4 и экран тактильной матрицы 3 образуют герметичную камеру, заполненную магнитной жидкостью 6. В основании тактильной матрицы 2 под каждой ячейкой 1 тактильной матрицы имеются центрирующие углубления 7. Количество ячеек 1 тактильной матрицы определяет информационное разрешение устройства. Это количество согласуется с количеством датчиков давления эндоскопа, снимающих информацию о состоянии обследуемой ткани, определяется требованиями к размерам исследуемых образцов и уплотнений, размерами ячеек тактильной матрицы и устройства в целом и может быть различным.
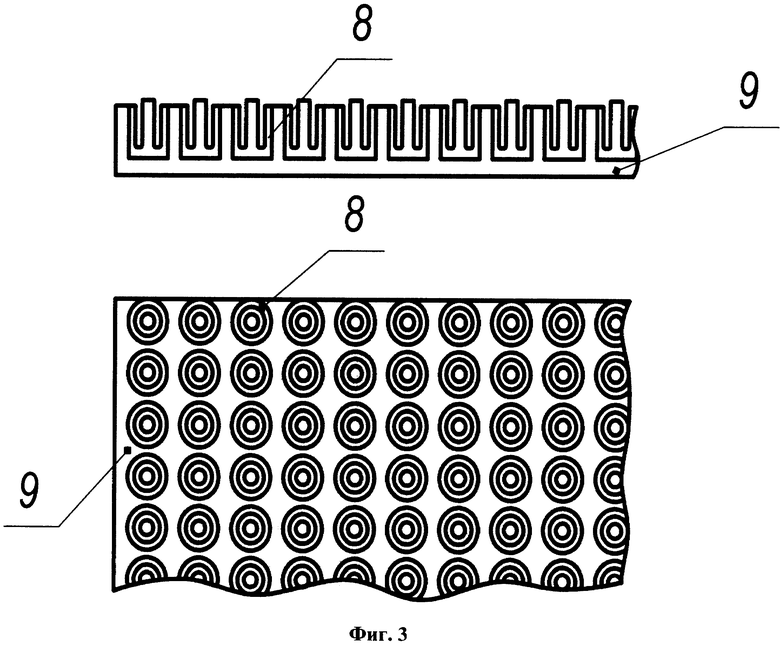
Матрица управления устройства (фиг.3) состоит из множества ячеек 8 матрицы управления, размещенных на общем жестком основании 9 матрицы управления.
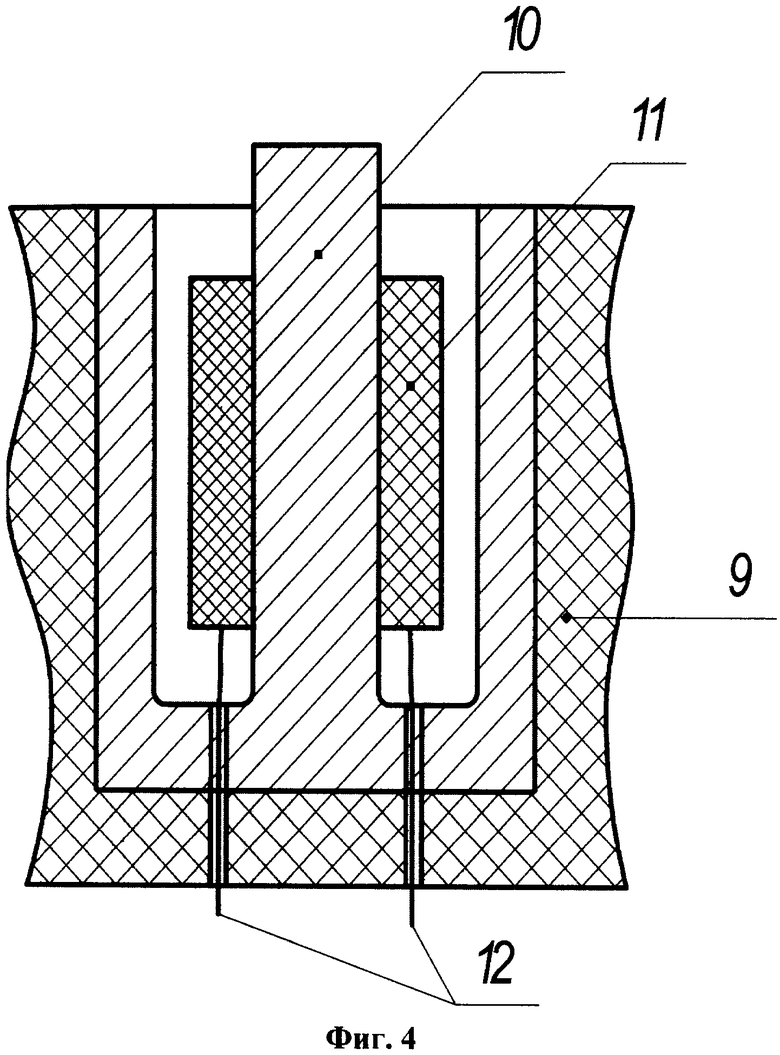
Ячейка 8 матрицы управления (фиг.4) содержит сердечник 10 ячейки матрицы управления, на котором размещена обмотка 11 с выводами 12. Сердечник 10 неподвижно закреплен в общем жестком основании 9 матрицы управления. Сердечник 10 выполнен с выступом, совпадающим по размерам с размерами центрирующего углубления 7 ячейки 1 тактильной матрицы устройства.
В собранном состоянии тактильная матрица устройства (фиг.1) соединяется с матрицей управления устройства (фиг.3), причем все выступы сердечников 10 ячеек 8 матрицы управления входят в соответствующие центрирующие углубления 7 ячеек 1 тактильной матрицы.
Схема устройства передачи и воспроизведения тактильного изображения состояния ткани при эндоскопическом обследовании (фиг.5) содержит датчики давления 13 эндоскопа, количество которых должно соответствовать количеству ячеек 1 тактильной матрицы, измерительные усилители 14, входной коммутатор 15, первый усилитель с регулируемым коэффициентом усиления 16, первый перемножитель 17, второй перемножитель 18, второй усилитель с регулируемым коэффициентом усиления 19, сумматор управляющего сигнала 20, сумматор 21 общего давления, блок индикации величины общего давления 22, регулятор уровня 23 общего давления в ячейках тактильной матрицы, регулятор контрастности 24 давления в ячейках тактильной матрицы, выходной коммутатор 25, блок синхронизации 26, ячейки памяти 27 выходных сигналов, ячейки 8 матрицы управления, ячейки 1 тактильной матрицы.
Устройство работает следующим образом.
В процессе обследовании состояния ткани датчики давления 13 эндоскопа вырабатывают сигналы, которые отражают плотность исследуемой биологической ткани. Эти сигналы усиливаются на измерительных усилителях 14 и подаются на входной коммутатор 15, который по командам с блока синхронизации 26 поочередно в круговом цикле подключает выходы измерительных усилителей 14 к входам первого усилителя с регулируемым коэффициентом усиления 16, первого перемножителя 17 и сумматора 21 общего давления. Сигнал с первого перемножителя 17 через второй перемножитель 18 и второй усилитель с регулируемым коэффициентом усиления 19 подается на первый вход сумматора управляющего сигнала 20, на второй вход которого подается сигнал с первого усилителя с регулируемым коэффициентом усиления 16. Сигнал с выхода сумматора управляющего сигнала 20 через выходной коммутатор 25, который по командам с блока синхронизации 26 синхронно с входным коммутатором 15 поочередно в круговом цикле подключает входы ячеек памяти 27 выходных сигналов и затем ячейки 8 матрицы управления и ячейки 1 тактильной матрицы. Управляющий вход сумматора 21 общего давления подключен к блоку синхронизации 26. Выход сумматора 21 подключен к входу блока индикации величины общего давления 22.
В результате ячейки памяти 27 выходных сигналов поддерживают значение напряжения, которое подается внутри кругового цикла на выводы 12 обмотки 11 ячейки матрицы управления (фиг.4). Это напряжение приводит к намагничиванию сердечника 10 и замыканию магнитного потока через магнитную жидкость 6 и ферромагнитные разделительные вставки 5 ячейки тактильной матрицы (фиг.2). При этом вязкость магнитной жидкости 6 и тактильные свойства (жесткость) в ячейках тактильной матрицы изменяются в зависимости от величины прикладываемого к выводам 12 обмотки 11 величины напряжения. Это воспринимается при тактильном обследовании как отдельные уплотнения в ячейках тактильной матрицы.
На блоке индикации величины общего давления 22 отображается величина прижима всех датчиков давления 13 эндоскопа к обследуемой ткани. Наблюдая эту величину, врач может регулировать усилие прижатия эндоскопа к исследуемой ткани для более точного выявления ее состояния.
Величина коэффициента усиления первого усилителя с регулируемым коэффициентом усиления 16 устанавливается регулятором уровня 23 общего давления в ячейках тактильной матрицы, величина коэффициента усиления второго усилителя с регулируемым коэффициентом усиления 19 устанавливается регулятором контрастности 24 давления в ячейках тактильной матрицы.
Такое решение позволяет посредством регулятора уровня 23 общего давления изменять коэффициент усиления первого усилителя с регулируемым коэффициентом усиления 16 от нуля до максимальной величины, а следовательно, одновременно менять уровень намагниченности магнитной жидкости одновременно во всех ячейках тактильной матрицы. Этим достигается подстройка тактильного дисплея под тактильную восприимчивость врача, проводящего обследование ткани.
Первый 17 и второй перемножитель 18 обеспечивают существенное усиление сильных сигналов при некотором ослаблении слабых сигналов, В результате повышается контрастность в намагниченности магнитной жидкости в ячейках тактильной матрицы. Регулятор контрастности 24 устанавливает коэффициент усиления второго усилителя с регулируемым коэффициентом усиления 19 от нуля до максимальной величины, тем самым изменяя контрастность тактильного изображения. Для лучшего восприятия тактильной информации врач может регулировать контрастность тактильного изображения на тактильной матрице для более точного выявления состояния исследуемой ткани.
Другой вариант устройства предполагает заполнение герметичной камеры 6 с магнитной жидкостью ячейки 1 тактильной матрицы пустотными объектами округлой формы из ферромагнитных материалов с плотностью, равной плотности магнитной жидкости. В отсутствие магнитного поля эти объекты находятся в произвольном положении и распределены по всему объему герметичной камеры. Под действием магнитного поля объекты объединяются, что ощущается при тактильном обследовании как местное уплотнение.
Такое решение позволяет усилить эффект изменения жесткости в ячейках 1 тактильной матрицы под действием прикладываемого магнитного поля, что способствует улучшению оценки состояния исследуемой ткани.
Предложенное техническое решение расширяет функциональные возможности устройства за счет передачи и отображения тактильной информации о состоянии ткани при эндоскопическом обследовании и повышает контрастность предоставления тактильной информации для восприятия рукой врача.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТАКТИЛЬНОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2011 |
|
RU2479245C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ УПРУГОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2012 |
|
RU2515481C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ОТОБРАЖЕНИЯ ТАКТИЛЬНОЙ ИНФОРМАЦИИ ПРИ ЭНДОСКОПИЧЕСКОМ ИССЛЕДОВАНИИ ПЛОТНОСТИ ТКАНИ | 2008 |
|
RU2391891C2 |
| УСТРОЙСТВО ТАКТИЛЬНОГО ДИСПЛЕЯ ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ | 2011 |
|
RU2488343C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391892C2 |
| УСТРОЙСТВО ТАКТИЛЬНОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2008 |
|
RU2391893C2 |
| УСТРОЙСТВО ИССЛЕДОВАНИЯ ПЛОТНОСТИ БИОЛОГИЧЕСКОЙ ТКАНИ | 2009 |
|
RU2440016C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СВАРОЧНОЙ ГОРЕЛКИ | 2004 |
|
RU2278770C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2005 |
|
RU2286080C2 |
| Эндоскоп с системой управления | 2022 |
|
RU2791385C1 |
Изобретение относится к медицинской технике. Устройство содержит эндоскоп с датчиками плотности ткани, причем датчиками плотности ткани являются датчики давления, тактильную матрицу, состоящую из множества ячеек, выполненных на едином общем основании и содержащих перегородки, в которые встроены ферромагнитные разделительные вставки, экран тактильной матрицы, матрицу управления, состоящую из множества ячеек, размещенных на общем основании и содержащих сердечники, на которых размещены обмотки, измерительные усилители, входной коммутатор, первый и второй усилители с регулируемым коэффициентом усиления, первый и второй перемножители, сумматор управляющего сигнала, сумматор общего давления, блок индикации величины общего давления, регулятор уровня общего давления, регулятор контрастности, выходной коммутатор, блок синхронизации, ячейки памяти выходных сигналов. При этом основание, перегородки и экран тактильной матрицы образуют герметичную камеру, заполненную магнитной жидкостью, тактильная матрица соединена с матрицей управления посредством центрирующих углублений под каждой ячейкой в основании тактильной матрицы и выступов сердечников ячеек матрицы управления. Применение устройства позволяет расширить функциональные возможности устройства передачи и воспроизведения тактильного изображения состояния ткани при эндоскопическом обследовании с отображением тактильной информации для восприятия рукой врача. 5 ил.
Устройство передачи и воспроизведения тактильного изображения состояния ткани при эндоскопическом обследовании, содержащее эндоскоп с датчиками плотности ткани, причем датчиками плотности ткани являются датчики давления, выполненные в виде упругих камер, заполненных воспринимающей давление средой, отличающееся тем, что в устройство дополнительно введены тактильная матрица, состоящая из множества ячеек, выполненных на едином общем основании и содержащих перегородки, в которые встроены ферромагнитные разделительные вставки, экран тактильной матрицы, матрица управления, состоящая из множества ячеек, размещенных на общем основании и содержащих сердечники, на которых размещены обмотки, измерительные усилители, входной коммутатор, первый и второй усилители с регулируемым коэффициентом усиления, первый и второй перемножители, сумматор управляющего сигнала, сумматор общего давления, блок индикации величины общего давления, регулятор уровня общего давления, регулятор контрастности, выходной коммутатор, блок синхронизации, ячейки памяти выходных сигналов, причем основание, перегородки и экран тактильной матрицы образуют герметичную камеру, заполненную магнитной жидкостью, тактильная матрица соединена с матрицей управления посредством центрирующих углублений под каждой ячейкой в основании тактильной матрицы и выступов сердечников ячеек матрицы управления, датчики давления эндоскопа через измерительные усилители и входной коммутатор соединены с входами первого усилителя с регулируемым коэффициентом усиления, первого перемножителя и сумматора общего давления, выход которого соединен с входом блока индикации величины общего давления, выход первого перемножителя через второй перемножитель и второй усилитель с регулируемым коэффициентом усиления соединен с первым входом сумматора управляющего сигнала, второй вход которого соединен с выходом первого усилителя с регулируемым коэффициентом усиления, выход сумматора управляющего сигнала через выходной коммутатор и ячейки памяти выходных сигналов соединены с обмотками сердечников ячеек матрицы управления, блок синхронизации соединен с управляющим входом сумматора общего давления, входами входного и выходного коммутаторов, управляющий вход первого усилителя с регулируемым коэффициентом усиления соединен с выходом регулятора уровня общего давления, а управляющий вход второго усилителя с регулируемым коэффициентом усиления соединен с выходом регулятора контрастности давления в ячейках тактильной матрицы.
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТКАНИ ПРИ ЭНДОСКОПИЧЕСКОМ ОБСЛЕДОВАНИИ | 2005 |
|
RU2286080C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ТИПА ТКАНИ И АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1995 |
|
RU2138192C1 |
| US 2004267165, 30.12.2004 | |||
| US 5339799, 29.10.1992 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПОЛУЧЕНИЯ СПИРО-[2-ОКСО-4,6-ДИФЕНИЛ- ГЕКСАГИДРОПИРИМИДИН-5,5'-БАРБИТУРОВОЙ КИСЛОТЫ] | 0 |
|
SU218893A1 |
| US 2004254503, 16.12.2004 | |||
| JP 2006102152 A, 20.04.2006 | |||
| US 4469091 A, 04.09.1984 | |||
| САДОВНИЧИЙ В.А | |||
| и др | |||
| Искусственный тактильный механорецептор | |||
| Теория, опыт создания, экспериментальная апробация | |||
| Ж.: Технология живых систем, № 4, 5, 2005, с.8-15. | |||

