Предложенное изобретение касается тормозного устройства, предназначенного для удержания движущегося тела в неподвижном состоянии и замедления в случае необходимости его движения, в соответствии с признаками, изложенными в пункте 1 ограничительной части формулы изобретения, подъемника с таким тормозным устройством, способа получения информации о функционировании тормозного устройства и модернизационного комплекта с таким тормозным устройством.
Из публикации DE 19737485 С1 известно тормозное устройство с электромагнитным приводом, со стационарным корпусом и вращающимся в нем рабочим валом. С рабочим валом соединены два тормозных диска, установленных без возможности вращения, но с возможностью осевого перемещения. При воздействии нормальной силы каждый из сдвигаемых в осевом направлении анкерных дисков так подпружинен посредством соответствующей пружины относительно тормозных дисков, что происходит первый скользящий контакт между тормозными дисками и корпусом и второй скользящий контакт между не вращающимися по отношению к корпусу анкерными дисками и тормозным диском. Действующие при таком контакте силы трения противодействуют вращению относительно рабочего вала и корпуса, установленного без возможности вращения тормозного диска, в частности, соединенных с ним установленных без возможности вращения анкерных дисков, и таким образом тормозят рабочий вал. Для выключения тормоза анкерные диски размыкаются при помощи электромагнитов против силы действия пружин. Для снижения возникающего при включении тормоза шума анкерные диски выполнены из трех частей.
В случае если такое тормозное устройство создает относительно меньшую силу трения между анкерными и тормозными дисками, например вследствие износа тормозных дисков, то это может привести к проскальзыванию анкерных дисков относительно прилегающих к ним тормозных элементов дисков. Это ставит под угрозу безопасность.
Поэтому задачей предлагаемого изобретения является создание тормозного устройства, обеспечивающего более высокий уровень безопасности.
Для решения этой задачи предложено усовершенствованное тормозное устройство в соответствии с признаками пункта 1 формулы изобретения. В пункте 11 заявлен соответственно оборудованный подъемник, в пункте 15 - соответствующий способ, а в пункте 18 - соответствующий модернизационный комплект.
Соответствующее этому типу тормозное устройство включает в основном неподвижный элемент и подвижный элемент, двигающийся относительно неподвижного элемента с одной степенью свободы и затормаживаемый относительно неподвижного элемента.
Причем понятие "Торможение" может включать в равной степени как затормаживание подвижного элемента относительно неподвижного, то есть снижение его относительной скорости, так и полное прекращение движения, или остановку подвижного элемента. Отличие неподвижного элемента от подвижного состоит по существу в разграничении двух двигающихся относительно друг друга с определенной степенью свободы элементов. Так, например, один из неподвижных и подвижных элементов может быть размещен инерционно устойчиво по отношению к окружающим деталям для того, чтобы тормозить другой неподвижный и подвижный элемент относительно окружающих деталей. Таким тормозящим элементом может являться привод, применяемый, например, для приведения в движение, замедления движения и остановки ведущего шкива подъемника и таким образом, тормозящим движущееся тело подъемника. Движущимися телами подъемника являются, в частности, кабина, предназначенная для принятия транспортируемого груза, или противовес, используемый в подъемных устройствах для балансирования массы кабины и обеспечения движения. Тормозящим элементом может являться также составная часть движущегося тела, в частности, кабины, или противовеса. Причем тормозное устройство может быть, в частности, выполнено в виде стояночной тормозной системы для остановки кабины.
В современных подъемниках допустимо, если управление и замедление движения кабины лифта вплоть до ее остановки, в частности взаимодействующих с кабиной элементов привода, таких как привод, противовес и тяговый элемент, осуществляется посредством электродвижущей силы, а вследствие этого задачей тормозного устройства является только удержание уже остановившейся кабины. Однако подобное тормозное устройство наряду с функцией удержания должно осуществлять торможение, например, если в случае возникновения таких неполадок, как, например, прекращение подачи электроэнергии, необходимо быстро остановить кабину лифта.
Первой степенью свободы может являться, например, степень вращения. В этом случае подвижный элемент может размещаться с возможностью вращения в неподвижном элементе. В этом смысле понятие "Сила" содержит в обобщенном смысле силы, действующие в соответствующей степени свободы, в частности вращающие моменты, для того, чтобы представить обобщенно предложенное изобретение, применяемое для действующих в разных степенях свободы тормозных устройствах. Следовательно, если речь идет о "Силе трения", то также и в степенях вращения, содержится, равным образом, вращающий момент трения.
Первая степень свободы также может быть поступательно движущейся степенью свободы. В этом случае подвижный элемент может быть расположен в неподвижном элементе с возможностью перемещения, как это, например, известно из публикации DE 41 06 595 А1, где статичный элемент в виде мерного тормоза скользит вдоль подвижного элемента в виде тормозной рабочей направляющей.
Между неподвижным и подвижным элементами вследствие воздействия управляемой нормальной составляющей силы, действующей во второй степени свободы, может произойти выборочно первый скользящий контакт на первой плоскости касания. Во время первого скользящего контакта движению подвижного элемента относительно неподвижного противодействует первая сила трения. В этом случае, например, в соответствии с публикацией DE 19737485 С1, тормозные диски прижимаются первой плоскостью касания к корпусу. Возникающие во время этих скользящих контактов первые силы трения противодействуют вращению рабочего вала, соединенного с тормозными дисками без возможности вращения. Причем, как указывалось ранее, понятие "Сила трения" вследствие степени свободы вращения рабочего вала включает воздействующий на него вращающий момент трения.
Кроме того, предусмотрена установка одного или нескольких промежуточных элементов таким образом, чтобы между подвижным элементом и каждым из промежуточных элементов под воздействием нормальной силы происходил второй контакт на второй плоскости касания и во время второго скользящего контакта вторая сила трения противодействовала движению подвижного элемента относительно промежуточного элемента. Например, в соответствии с публикацией DE 19737485 С1 первый делительный диск каждого состоящего из трех частей анкерного диска оказывает давление на соответствующий тормозной диск, если нормальная сила прижимает тормозной диск к корпусу. Возникающие во время этих скользящих контактов вторые силы трения противодействуют вращению рабочего вала, соединенного без возможности вращения с тормозными дисками относительно первых делительных дисков, соединенных с корпусом без возможности вращения.
Кроме того, каждому промежуточному элементу предпочтительно соответствует нажимной элемент, находящийся в неподвижном состоянии по отношению к статичному элементу в первой степени свободы, причем между нажимным элементом и промежуточным элементом при воздействии нормальной силы происходит третий контакт скольжения в третьей плоскости касания и во время третьего контакта скольжения третья сила трения противодействует движению промежуточного элемента относительно нажимного элемента. Например, в DE 19737485 С1 второй делительный диск состоящего из трех частей анкерного диска нажимает на первый делительный диск, если нормальная сила прижимает тормозной диск к корпусу. Возникающие при таких скользящих контактах третьи силы трения противодействуют вращению первых делительных дисков относительно вторых делительных дисков. Предпочтительно, если первая, вторая и третья плоскости касания нагружаются одинаковыми нормальными силами.
При скользящем контакте возникает, в общем, постоянно одинаковая суммарная величина прочих сил, противодействующая такой же силе трения FR, имеющей максимальное значение, равное FRmax=µ×FN, причем FN является действующей на площадь контакта нормальной силой, a µ - коэффициентом трения. Действует в этом случае трение сцепления (показатель Н), тогда максимальное значение силы трения, равно FRH=µH×FN. Превышает суммарная величина остальных приложенных сил это значение, - трение сцепления скользящего контакта переходит в трение скольжения (показатель G), и коэффициент трения будет равен FRG=µG×FN. Причем понятие "Трение скольжения" содержит также и трение качения, возникающее, например, при перекатывании подшипников качения.
В соответствии с изобретением промежуточный элемент совершает движение в первой степени свободы по отношению к неподвижному элементу из обычного положения в положение торможения и предварительно подпружинен в нормальном положении, причем вторая и третья площади контакта выполнены так, чтобы максимальное значение второй силы трения, в частности, при сцеплении во время второго и третьего скользящего контакта было больше максимального значения третьей силы трения. Движение промежуточного элемента в первой степени свободы за границы положения торможения ограничивается, например, путем геометрического, или силового замыкания. Предпочтительно, если движение промежуточного элемента между положением торможения ограничено выступами.
В механическом аспекте происходит следующее: если подвижный элемент удерживается, то нормальная сила FN действует во второй степени свободы, все три скользящих контакта произошли, и действует сила сцепления. Поскольку третья сила
трения FR3H, действующая между промежуточным элементом и нажимным элементом, находящимся неподвижно в первой степени свободы по отношению к неподвижному элементу, всегда меньше максимального значения действующей между промежуточным элементом и подвижным элементом второй силы трения FR2maxH, эта меньшая третья сила трения FR3H ограничивает ту силу трения, которая передается через нажимной элемент и промежуточный элемент между неподвижным и подвижным элементами. Вместе с первой силой трения FR1H, передаваемой непосредственно, то есть без промежуточного включения нажимного элемента и промежуточного элемента на первую плоскость касания, возникает общая, действующая на подвижный элемент сила трения FRH, равная сумме величин этих обеих сил трения:

Если теперь при эксплуатации уже не хватает этой силы трения для остановки подвижного элемента, что может иметь место, в частности, в результате износа, или загрязнения, приводящих, в частности, к уменьшению нормальной силы и/или более низкому коэффициенту трения плоскостей касания, то происходит проскальзывание подвижного элемента относительно неподвижного в первой степени свободы.
В этом случае подвижный элемент также движется под действием нормальной силы FN в первой степени свободы. Поскольку в соответствии с изобретением максимальная величина второй силы трения, возникающая между промежуточным элементом и подвижным элементом, больше максимальной величины третьей силы трения, возникающей между промежуточным элементом и нажимным элементом, то при втором скользящем контакте по-прежнему присутствует сила сцепления, в то время как третий скользящий контакт переходит в состояние скольжения (в частности, в прокручивание). Подвижный элемент захватывает при этом промежуточный элемент в первой степени свободы, пока он из своего обычного положения не перейдет в положение торможения, а в дальнейшем застопорится путем геометрического замыкания, например, выступом. Вследствие этого промежуточный элемент самостоятельно, то есть без внешнего управления, переключается из обычного положения в положение торможения, и это переключение происходит в обоих направлениях движения, в частности, в обратном и прямом.
Как только промежуточный элемент остановился в положении торможения и застопорился неподвижно в первой степени свободы относительно неподвижного элемента, то вторичная сила трения FR2 передается от неподвижного элемента к подвижному элементу через вторую плоскость касания между промежуточным элементом и подвижным элементом. Вследствие этого общая величина действующей на подвижный элемент силы трения FR складывается из суммы этих двух сил трения:


Если согласно предложенному изобретению в тормозном устройстве уже не хватает общей силы трения FR=FR1+FR3, обычно прилагаемой для остановки подвижного элемента, тогда он совершает движение в первой степени свободы и, как описывалось прежде, смещает при этом промежуточный элемент в его положение торможения, в котором он стопорится относительно неподвижного элемента и передает вторую силу трения FR2 большей величины на подвижный элемент, увеличивая тем самым действующую на подвижный элемент силу трения от FR1+FR3 до FR1+FR2. Предпочтительно, что таким образом можно увеличить запас безопасности S=(FR1+FR2)/(FR1+FR3) на случай, если уже недостаточно нормальной общей силы трения, например, когда первая и/или третья плоскость касания имеет износ, замаслена, или нормальная сила стала меньше.
Кроме того, такое поэтапное накопление всей необходимой для торможения силы особенно предпочтительно, поскольку уменьшается воздействие импульса силы на всю движущуюся систему, так как передача тормозного усилия осуществляется в два этапа.
Альтернативно вместо третьей плоскости касания и нажимного элемента можно также использовать, например, нажимную пружину, с одной стороны, прижимающую промежуточный элемент во второй степени свободы, а с другой - дающую возможность промежуточному элементу осуществлять в первой степени свободы относительное перемещение между нормальным положением и положением торможения. В этом варианте выполнения изобретения промежуточный элемент может быть одновременно выполнен, например, как анкерная пластина. При таком выполнении значение силы трения третьей плоскости касания (FR3) практически сводится к нулю. В других вариантах выполнения изобретения постоянно используется третья плоскость касания, которая исключается, а соответствующая сила трения (FR3) становится равной нулю.
При эксплуатации тормозных устройств большую сложность может представлять простота и надежность получения информации о неисправностях. Например, неисправность может возникнуть, если при эксплуатации подъемника тормозное устройство не выключается, или оно, как описывалось прежде, только производит более слабое тормозное усилие. Согласно внутренним инструкциям для этого следует, например, в установленные сроки обслуживания вручную проверять величину тормозного усилия и степень износа, что отнимает много времени и требует затрат рабочей силы.
Для решения этой задачи в предпочтительном варианте выполнения предлагаемого изобретения тормозное устройство содержит сенсорное устройство для определения нормального положения и/или положения торможения промежуточного элемента. В качестве такого сенсорного устройства может, например, рассматривается контакт, который замыкается, если промежуточный элемент находится в положении торможения и/или размыкается, как только он переместиться из нормального положения. Таким же образом можно отслеживать положение промежуточного элемента, например, посредством оптических датчиков, или получать информацию при помощи позиционного датчика.
Если теперь, как описано прежде, подвижный элемент приводится в движение даже под воздействием нормальной силы FN в первой степени свободы, то подвижный элемент захватывает с собой промежуточный элемент в первой степени свободы, пока он из нормального положения не перейдет в положение торможения.
Это движение промежуточного элемента распознается сенсорным устройством, определяющим нормальное положение и/или положение торможения. Поскольку промежуточный элемент в нормальном положении предварительно подпружинен и
остается в нем при достаточной для торможения общей силы трения FRH=FR1H+FR3H, в частности, остается в нем при нормальной без сбоев в функционировании эксплуатации, то следовательно, по смещению промежуточного элемента из нормального положения в положение торможения можно уверенно делать вывод о возникших неполадках и, например, передать предупреждение на блок управления подъемником.
Преимущество изобретения состоит в использовании целесообразной системы слежения, контролирующей исправность функционирования тормозного устройства. Эта система слежения содержит сенсорное устройство для получения информации о нормальном положении и/или положении торможения промежуточного элемента, датчик скорости и/или датчик перемещения и устройство передачи команд на тормозное устройство. В отдельных случаях тормозное устройство может быть оборудовано также другим датчиком для определения состояния: "контактный цикл прерван, в частности, тормоз включен", или "контактный цикл замкнут, в частности, тормоз отпущен". "Сигнал управления тормозным устройством" сообщает далее о состоянии команды, которую устройство управления передает тормозному устройству в виде сигнала управления ("включено" или "выключено"). Сигнал "Скорость" соответствует состоянию подвижного элемента, в частности, движущегося тела, или кабины лифта и передает информацию, находится ли подвижный элемент в положении покоя (0), или в положении движения (≠0).
Например, исходя из этого, диагностику состояния можно проводить по следующей схеме:
Такая схема проведения диагностики позволяет, по меньшей мере, осуществлять длительный контроль функционирования тормозного устройства, так как, в частности, при каждой остановке (F1,F2) можно получать информация о заданном состоянии, а при отклонениях от него - принимать соответствующие меры. Можно не опасаться, что при перемещении в положение торможения возникнет увеличенная тормозная сила, как правило, приблизительно большая, чем в позиции 2. Вследствие этого обеспечивается надежная остановка.
Равным образом, при обнаружении нарушения воздушного зазора (F5) можно остановить подъемник и сверить параметры функционирования. На основании учета неисправностей, накапливаемого в блоке контроля, можно целенаправленно проводить сервисное обслуживание.
При этом путь свободного хода промежуточного элемента может быть небольшим. Он может быть выбран только такой величины, чтобы надежно и просто обеспечивать определение положения промежуточного элемента сенсорным устройством, а с другой стороны, чтобы не возникало опасное отклонение от положения остановки вследствие образования смещения подвижного элемента, в частности, движущегося тела, например, если кабина лифта находится выше, или ниже заданного положения. Обычно длина выбранного свободного хода находится примерно в пределах от 3 до 10 мм в каждом направлении движения в соответствии с первой степенью свободы.
Промежуточный элемент удерживается в нормальном положении посредством предварительного натяжения, и, в частности, после завершения относительного смещения - снова возвращается в исходное положение. Это натяжение может осуществляться, например, при помощи упругой пружины, иногда - простым упругим стержнем, механической пружины сжатия или винтовой пружины, а также гидравлической пружины. Возможно также использование магнитной силы в качестве предварительного натяжения при соответствующем направлении магнитного поля. Устройство предварительного натяжения можно комбинировать с магнитным узлом, особенно, если вместо нажимного элемента, как пояснялось прежде, используется прижимная пружина.
Прежде не учитывалось преодолеваемое промежуточным элементом для совершения движения из нормального положения в положение торможения предварительное натяжение, удерживающее промежуточный элемент в нормальном положении, в частности, стремящееся вернуть его на прежнее место. Предпочтительно вторая и третья плоскости касания выполнены так, что максимальная величина второй силы трения, в частности, при сцеплении в ходе второго и третьего скользящих контактов, была все же больше суммарной величины максимальной третьей силы трения и силы предварительного натяжения KV, удерживающей промежуточный элемент в нормальном положении:

что выполняется, если не учитывать меньшую силу KV для:

в частности, если вторая сила трения значительно больше третьей силы трения:

Поскольку кроме этого в тормозных устройствах, в частности, предназначенных
для подъемников, постоянно возникают относительно большие силы трения FR2H, FR3H, то к уравнению (2'), в частности, (2'') с большим приближением относится также и уравнение(2).
Прежде объяснялся случай остановки подвижного элемента, при котором во время первого, второго и третьего контакта скольжения соответственно имеет место трение сцепления. Этот случай относится только к тормозным устройствам, предусмотренным для совершения остановки в качестве стояночной тормозной системы.
Если к тому же тормозное устройство применяется дополнительно для притормаживания подвижного элемента, то подвижный элемент продолжает движение во время торможения также под действием нормальной силы в первой степени свободы и пытается в соответствии с описанным прежде принципом захватить с собой промежуточный элемент и перевести его из нормального положения в положение торможения. В этом случае в первом, и, по меньшей мере, во втором, и третьем скользящем контакте имеет место трение скольжения.
В этом случае сила KV, прижимающая промежуточный элемент в нормальном положении, может быть рассчитана так, чтобы она при штатном режиме процесса торможения вместе с третьей силой трения в достаточной степени компенсировала бы вторую силу трения и вследствие этого удерживала промежуточный элемент в его нормальном положении. В общих чертах предварительное натяжение может производиться, например, посредством упругой пружины, иногда механической пружины сжатия или винтовой пружины, или гидравлической пружины. Когда подвижный элемент, в результате затормаживания останавливается и в завершение удерживается, то при первом, втором и, в частности, третьем скользящих контактах их характер изменяется от трения скольжения до трения сцепления. В общем, возникающие при этом значения сил трения сцепления значительно больше, чем сопутствующих торможению сил трения при трении скольжения (в частности, трении качения).
Если затем суммарной величины силы трения сцепления FRH=FR1H+FR3H уже недостаточно для остановки подвижного элемента, тогда он, как описывалось прежде, перемещается, наконец, в свое положение торможения и там останавливается неподвижно, что фиксируется в предпочтительном варианте выполнения изобретения сенсорным устройством. Поскольку трение скольжения в целом значительно меньше трения сцепления, промежуточный элемент вследствие этого может удерживаться небольшим предварительным натяжением в своем нормальном положении во время торможения, где трение скольжения возникает, по меньшей мере, в некоторых плоскостях касания, в то время как при остановке, когда присутствует сила сцепления, а вместе с ней большая вторая и третья сила трения, вступает в действие описанный выше механизм обеспечения достаточной величины общей составляющей сил, в частности, для определения ошибочно низкой общей составляющей силы торможения сцепления FRH=FR1H+FR3H.
Исходя из этого в предпочтительном варианте выполнения изобретения вторая и
третья плоскости касания выполнены таким образом, что вторая сила трения FR2, возникающая при скольжении во втором скользящем контакте, меньше суммы сил, слагаемых из силы KV, предварительно прижимающей промежуточный элемент в
нормальном положении и третьей силы трения FR3 и/или FR3, возникающей при скольжении, в частности, сцеплении в ходе третьего скользящего контакта. Поэтому промежуточный элемент удерживается во время торможения в своем нормальном положении. Одновременно с этим вторая и третья плоскости касания выполнены в этом предпочтительном варианте так, что максимальная величина второй силы трения FR2maxH, составляющей максимальное значение при сцеплении во время второго скользящего контакта, будет больше суммарной величины, слагаемой из силы KV, предварительно прижимающей промежуточный элемент в нормальном положении и третьей силы трения FR3maxH, которая может возникнуть при сцеплении в третьем скользящем контакте. Как объяснялось прежде, это реализовать просто, поскольку силы торможения сцепления в целом значительно больше сил торможения скольжения. Итак, в соответствии с предпочтительным вариантом выполнения изобретения принимается:


Но все же, как правило, выполнение условия (2) считается уже достаточным по следующим причинам: когда в тормозном устройстве начинается процесс торможения, то происходят первый, второй и третий скользящие контакты. Причем уже при втором скользящем контакте сразу же возникает трение скольжения между подвижным элементом, сначала двигающимся относительно статичного элемента, и промежуточным элементом, находящимся в предварительном натяжении, в неподвижном нормальном положении относительно статичного элемента. При третьем скользящем контакте между промежуточным элементом и нажимным элементом сначала возникает трение сцепления, пока промежуточный элемент не подвержен ускорению. В результате, как приводилось прежде, трение скольжения в целом значительно меньше максимального значения трения сцепления. Из-за этого действующая при втором скользящем контакте вторая сила трения FR2G в целом меньше третьей силы трения FR3maxH, имеющей максимальное значение в третьем скользящем контакте. Следовательно, в обычном случае (если только промежуточный элемент и нажимной элемент не двигаются относительно друг друга) вторая сила трения во время торможения во втором скользящем контакте, в котором преобладает трение скольжения, будет продолжительное время меньше третьей силы торможения в третьем скользящем контакте, когда преобладает трение сцепления. Это позволяет удерживать промежуточный элемент в его нормальном положении до тех пор, пока подвижный элемент совершенно не остановится. Итак, к началу торможения относится:

таким образом, промежуточный элемент не движется относительно нажимного элемента, а пребывает в своем нормальном положении, в то время как при втором скользящем контакте имеет место трение скольжения. Как только подвижный элемент останавливается, трение скольжения и второго скользящего контакта изменяется на трение сцепления и считается:

Превышают все другие силы, действующие на подвижный элемент, максимально производимые тормозным устройством силы торможения -
 ,
,
перемещается промежуточный элемент из нормального положения в положение торможения и неподвижно фиксируется в нем, причем предпочтительно, если можно получить информацию о нарушении функционирования. Как объяснялось, выполнения условия (2) достаточно, в частности, без учета действия силы KV условия (2), для повышения безопасности тормозного устройства и получения информации о неполадках только от остановившегося тормозного устройства. Если вместе с тормозным устройством тормозится также и подвижный элемент, то в рамках изобретения вполне достаточно выполнения условия (3), или (3') для определения: находится ли промежуточный элемент при штатном режиме процесса торможения в своем нормальном положении; это необходимо, чтобы иметь в результате, в распоряжении запас безопасности и, предпочтительно, для определения возникающих при торможении неисправностей.
Условие (3') выполняется, как правило, одновременно с условием (2), в частности, (2'), поскольку трение скольжения (в частности, трение качения) в основном значительно меньше трения сцепления. Следовательно, согласно изобретению единственным общим требованием является только то, что максимальная величина силы трения FR2max, присутствующая при втором скользящем контакте, как правило, определяется максимальной силой трения сцепления FR2maxH, больше максимальной силы трения FR3max, возникающей в третьем скользящем контакте и, как правило, определяется максимальной силой трения сцепления FR3maxH (условие (2')). Это, в общем, определяет также выполнение условия (3'), поскольку промежуточный элемент даже при торможении удерживается в своем нормальном положении до остановки.
Но все же предпочтительно, отказаться от точного согласования предварительного натяжения при использовании тормозного устройства, прежде всего, в качестве стопорного, в частности, стояночной тормозной системы и только в случае необходимости - для динамического торможения движущегося тела. Например, таким случаем может являться запрос системы слежения за скоростью движения, или прекращение подачи электроэнергии и т.д. Тогда в такой ситуации чрезвычайно важно, чтобы промежуточный элемент немедленно захватывался до положения торможения (В), а затем принудительно производил тормозную силу большей величины. В этом случае требования к предварительному натяжению соответственно незначительны, оно необходимо только для осуществления возвратного движения разгруженного промежуточного элемента (3) в свое нормальное положение и удержания его в нем незначительным усилием в незакрепленном состоянии.
Максимальная величина второй силы торможения может быть, например, больше максимальной величины третьей силы торможения за счет того, что вторая плоскость касания имеет больший коэффициент трения, чем третья плоскость касания. Этим обеспечивается выполнение условий (2), в частности, (2') и (3), в частности, (3'). Если нагрузить промежуточный и нажимной элементы одинаковой нормальной силой FN, то в результате возникает максимальная вторая сила трения FR2=µ2×FN, больше максимального значения третьей силы трения FR3=µ3×FN. Для этого вторая и третья плоскости касания могут быть выполнены, например, из различных материалов. С этой целью промежуточный элемент на второй плоскости касания может иметь покрытие для повышения коэффициента трения µ2 и/или на третьей плоскости касания нажимного элемента наносится покрытие для снижения коэффициента трения µ3. На третьей плоскости касания можно разместить подшипники качения, в частности игольчатые подшипники для получения необходимых значений коэффициентов трения.
В предпочтительном варианте выполнения изобретения коэффициенты силы трения первой и третьей плоскости касания, по существу, равны, поскольку во время первого и второго скользящего контакта возникают одинаковые силы трения, позволяющие равномерно распределять нагрузки. Понятие "Коэффициент силы трения" может содержать, преимущественно, как коэффициент трения сцепления, так и коэффициенты трения скольжения, в частности трения качения, причем в результате испытаний для практического применения первую и вторую плоскость касания выполняют в виде фрикционной обкладки.
В качестве альтернативы или дополнительно можно добиться максимального значения второй силы торможения большего, чем третья сила торможения, если наклонить третью плоскость касания относительно направления действия нормальной силы. Вследствие этого на наклонную третью плоскость касания соответственно действует меньшая нормальная сила, а следовательно, соответственно меньшая третья сила трения. Предпочтительно нормальная сила, действующая в первом, втором и третьем скользящем контакте, при наклонной третьей плоскости касания раскладывается на нормальную составляющую силы, вызывающую третью силу трения, относительно третьей плоскости касания и составляющую силы, направленную перпендикулярно к третьей плоскости касания, которая при движении в первой степени свободы в направлении действия третьей силы трения суммируется в третью общую силу трения, а при движении в противоположном направлении - вычитается из нее. Тем самым предпочтительно при движении в противоположном направлении в первой степени свободы можно получить разные значения третьих общих сил трения. Предпочтительно при использовании скошенной третьей плоскости касания во время относительного перемещения между промежуточным элементом и нажимным элементом происходит изменение нормальной силы, когда, например, пружины, применяемые для создания этой нормальной силы, сжимаются, или разжимаются. Предпочтительно это используется в подъемниках с частично сбалансированными противовесами, поскольку в зависимости от разных направлений скольжения можно получить разную эффективность торможения.
Как указывалось прежде, под понятием "Сила" в предложенной заявке понимаются действующие в соответствующей степени свободы линейные силы и крутящие моменты. Исходя из этого, разные силы трения можно было бы обозначить разными плечами сил.
Так, например, большую по величине вторую силу трения (в данном случае крутящий момент) можно показать таким образом, что второй скользящий контакт происходит дальше в радиальном направлении от оси вращения, чем третий скользящий контакт. Вследствие этого при одинаковой нормальной силе возникают разные силы трения, в данном случае - крутящие моменты.
Предпочтительно, если промежуточный элемент и нажимной элемент так перемещаются под действием нормальной силы во второй степени свободы, что происходят первый, второй и третий скользящие контакты. Это позволяет осуществлять скользящие контакты при помощи простой механической конструкции.
В частности, может быть предусмотрен тормозной элемент, статичный по отношению к подвижному элементу в первой степени свободы и перемещающийся, в частности, упруго изменяющий свою форму под действием нормальной силы во второй степени свободы, так, что происходят первый, второй и третий скользящие контакты.
Например, в соответствии с публикацией DE 19737485 С1, или DE 4106595 A1 нажимной элемент может быть предварительно напряжен нормальной силой, в частности, упругим средством, и разомкнут, в зависимости от выбора, - электромагнитным, или гидравлическим способом. При прекращении подачи напряжения к одному из электромагнитов, падении давления в трубопроводе гидросистемы, или сбое в системе управления тормозным устройством нажимной элемент уже не освобождается, и таким образом под воздействием нормальной силы скользящие контакты замыкаются, и приводится в действие тормозное устройство. Итак, тормозное устройство включается автономно и автоматически в случае дефекта.
Таким образом, представленное тормозное устройство выполнено так, что оно может быть переключено в нормальное положение, при котором тормозное устройство при остановившемся движущемся теле, в частности, остановившемся подвижном элементе, производит первое удерживающее усилие. Это удерживающее усилие рассчитано для удержания подвижного элемента в неподвижном состоянии. В дальнейшем тормозное устройство самостоятельно переключается из нормального положения в положение торможения при различном движении подвижного элемента, независимо от направления движения. В положении торможения тормозное устройство производит, по существу, удвоенное, или учетверенное удерживающее усилие, в частности силу торможения. Предпочтительно, это самостоятельное переключение из нормального положения в положение торможения контролируется посредством сенсорного устройства.
Преимущество этого аспекта изобретения заключается в возможности получения информации сенсорным устройством о первом проскальзывании подвижного элемента и осуществлении самостоятельного усиления удерживающего усилия, прекращающего дальнейшее пробуксовывание.
Предпочтительно использовать это тормозное устройство вместе с приводным двигателем, например электромотором, или гидравлическим устройством, регулирующим ускорение движения движущегося тела от неподвижного состояния и замедление его движения до остановки, вследствие чего тормозное устройство применяют, как правило, только для удержания движущегося тела в неподвижном состоянии.
Предложенное тормозное устройство может содержать большое количество
промежуточных элементов, а также соответствующих нажимных элементов, что известно из публикации DE 19737485 С1. Описанные прежде общие силы трения образуются в этом случае из суммарной величины первой и третьей, в частности второй силы трения.
Как объяснялось прежде, одна из вероятных неисправностей в функционировании тормозного устройства может состоять в том, что общая сила трения, слагаемая из первой и третьей силы трения, недостаточна для удержания подвижного элемента в неподвижном состоянии. Эту неисправность можно обнаружить при получении информации сенсорным устройством о нахождении промежуточного элемента не в своем нормальном положении. Причем предпочтительно, если движение промежуточного элемента ограничено выступами. После продвижения до этих выступов вступает в действие большая, по сравнению с третьей силой трения - вторая сила трения и удерживает подвижный элемент. Таким образом, эту неисправность в функционировании можно распознать, в общем, без угрозы нарушения функции остановки подвижного элемента. Имеется только одно предупреждение - используется резерв безопасности S. Вследствие этого уровень безопасности тормозного устройства становится выше и можно начинать сервисные работы.
Другая возможная неисправность состоит в том, что тормозное устройство в результате нее не выключилось, то есть во время эксплуатации первый, второй и третий скользящие контакты не разомкнуты. Эта неисправность может являться следствием, например, дефекта элементов управления тормозным устройством. И такую неисправность можно обнаружить, если сенсорное устройство зарегистрирует размещение промежуточного элемента не в своем нормальном положении. Поскольку, как описывалось прежде, в таком случае подвижный элемент захватывает промежуточный элемент в первой степени свободы, вследствие чего он перемещается из своего нормального положения в положение торможения. Эксплуатация подъемника, например, при возникновении такой неисправности может быть прекращена до того, как соответствующие плоскости касания перегреются, износятся, или получат другие повреждения.
Особенно предпочтительно, в данном случае, если работоспособность тормозного устройства и достаточный уровень безопасности при его эксплуатации можно определять во время каждого обычного рабочего цикла тормозного устройства. Это значительно повышает эксплуатационную безопасность тормозного устройства.
Как правило, подобное тормозное устройство поставляется в новых установках, предпочтительно, непосредственно вместе с соответствующим приводным элементом. Соответствующее тормозное устройство может также использоваться и в существующих установках и подъемниках в качестве замены существующего тормозного устройства. Этим можно значительно повысить порог безопасности, особенно в сочетании с возможной модернизацией управления приводом. Соответствующий модернизационный комплект может быть подготовлен с привязкой к известным подъемникам.
Другие задачи, особенности и преимущества предложенного изобретения вытекают из зависимых пунктов формулы изобретения и представленных ниже примеров выполнения изобретения. На приложенных чертежах схематично показано:
фиг.1а. Тормозное устройство в соответствии с первым примером выполнения предложенного изобретения в выключенном состоянии, вид в разрезе I-I на фиг.1b;
фиг.1b. Тормозное устройство по фиг.1а, поперечный разрез;
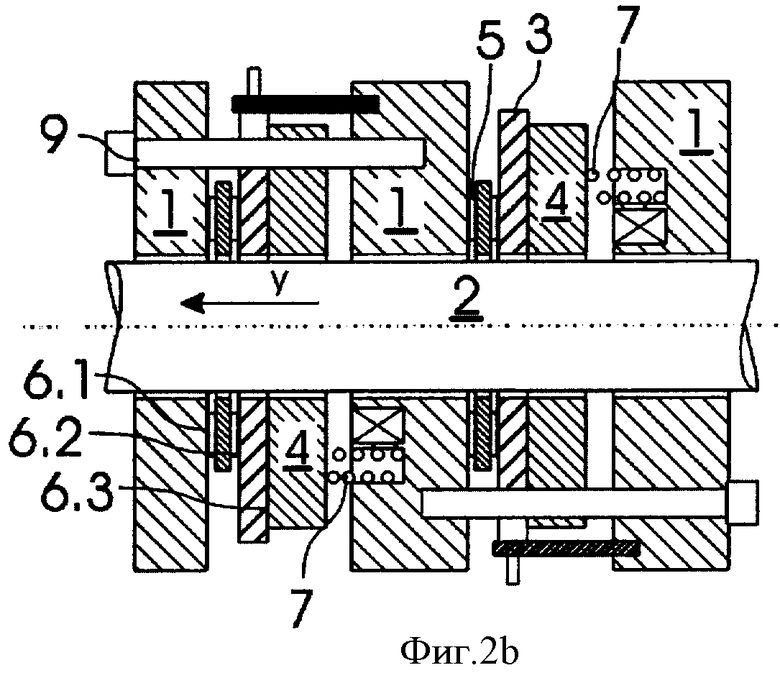
фиг.2а, 2b. Тормозное устройство по фиг.1в нормальном положении остановки;
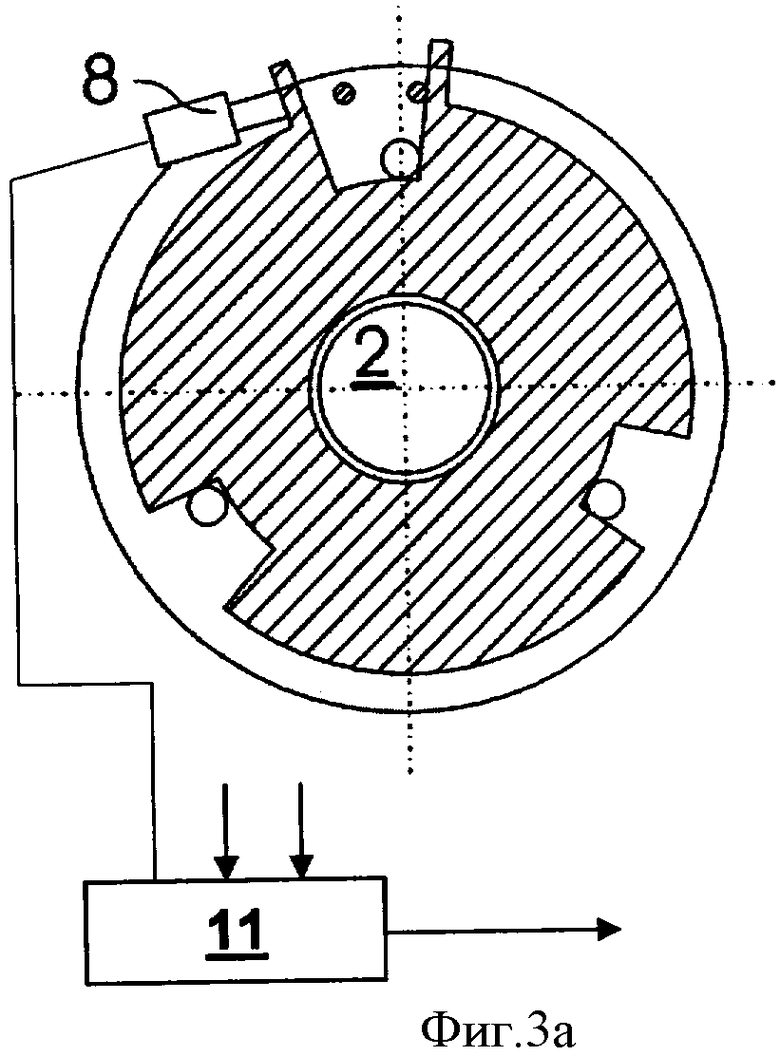
фиг.3а, 3b. Тормозное устройство по фиг.1 при сбое в работе, оснащенное системой контроля;
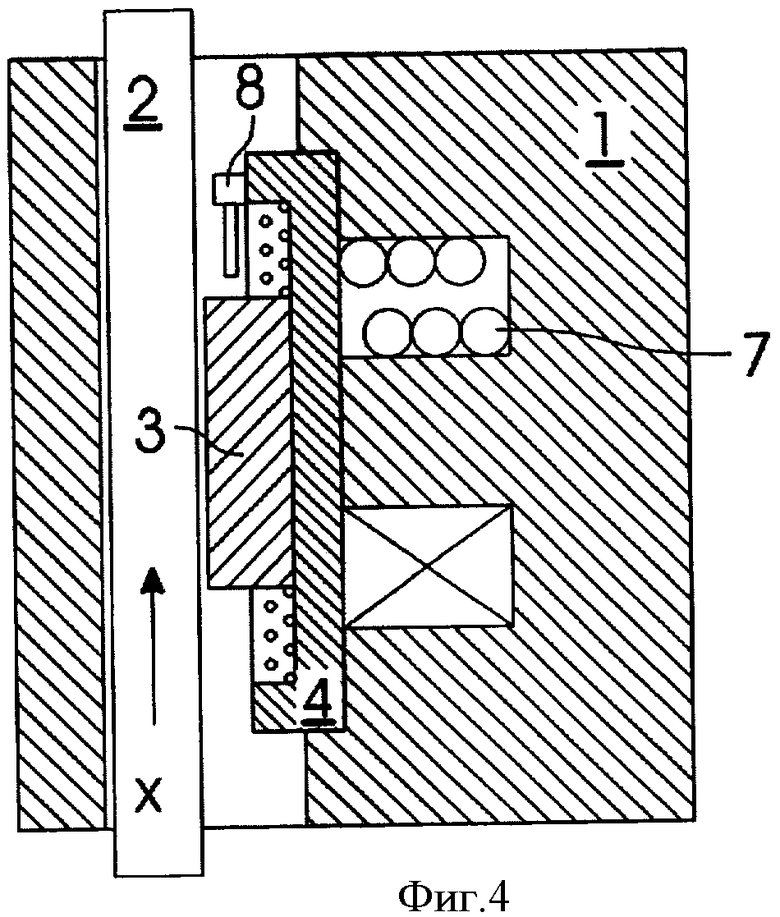
фиг.4. Тормозное устройство согласно второму варианту выполнения предложенного изобретения в выключенном состоянии, поперечный разрез;
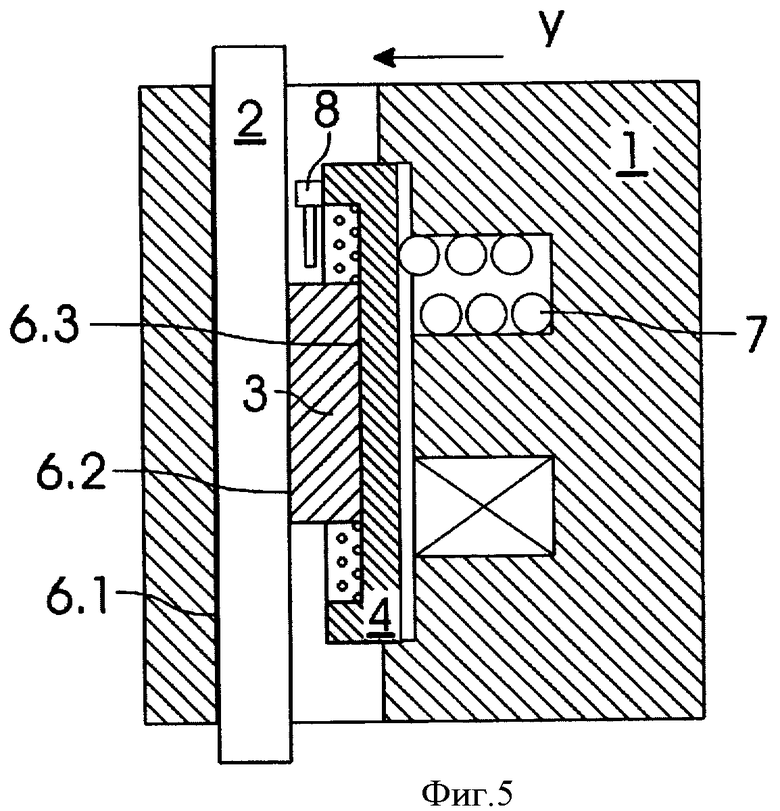
фиг.5. Тормозное устройство по фиг.4 в нормальном положении остановки;
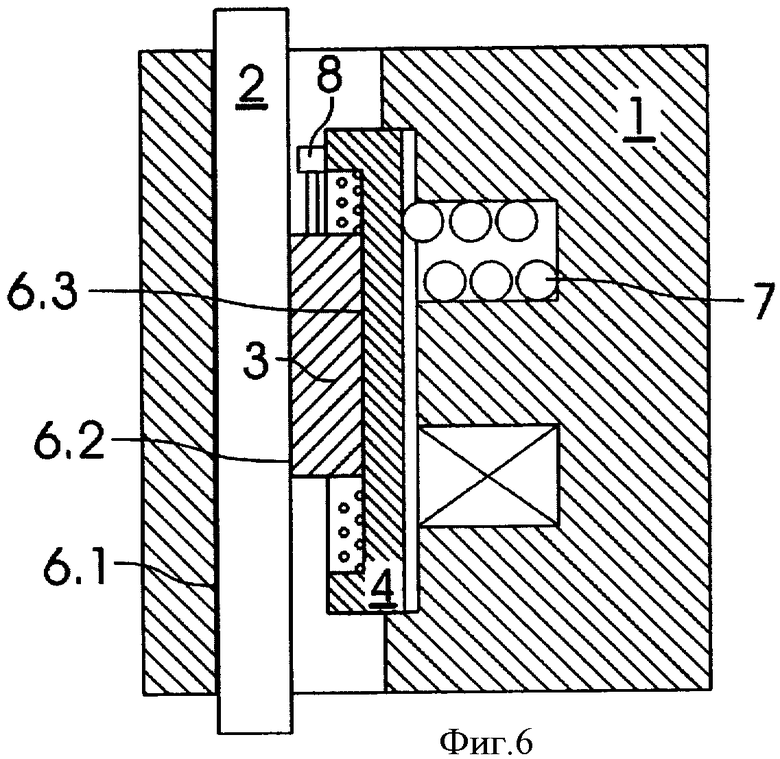
фиг.6. Тормозное устройство по фиг.4 при неисправности и
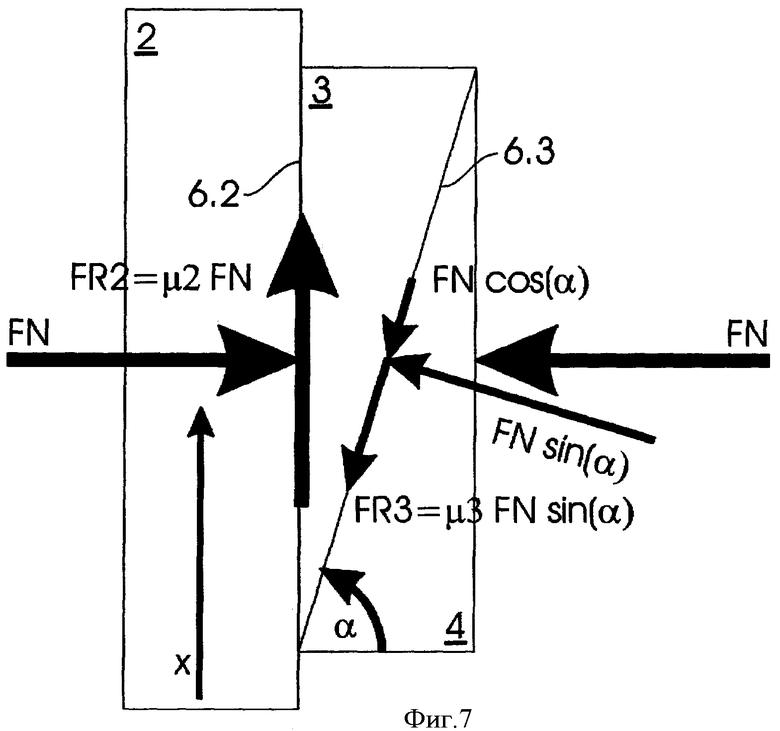
фиг.7. Принципиальная схема третьего примера выполнения предложенного изобретения.
На фигурах 1a, 1b показано тормозное устройство в соответствии с первым примером выполнения предложенного изобретения в выключенном, не производящем торможение состоянии в продольном, в частности, фронтальном разрезе. Тормозное устройство содержит неподвижный элемент в виде многосекционного инерционно неподвижного корпуса 1. В корпусе 1 расположен с возможностью вращения подвижный элемент в виде рабочего вала 2, имеющий относительно корпуса 1 степень свободы вращения ϕ. На валу установлены посредством зубчатого шлицевого соединения, или призматической шпонки (не показано), два тормозных элемента в виде тормозных дисков 5, перемещаемых по оси, однако без возможности поворота.
В корпусе 1 установлены перемещаемые по оси, однако, без возможности вращения два нажимных элемента в виде анкерных дисков 4. Для этого по окружности распределены три болта 9, проходящие через сквозные или глухие отверстия в корпусе 1 и анкерных дисках 4 и по которым скользят анкерные диски 4. Между каждым тормозным диском 5 и анкерным диском 4 размещен сдвигаемый в осевом направлении промежуточный элемент в форме диска 3. Каждый из дисков 3 имеет по три выреза 10 в форме паза с основанием паза, которые так захватывают болты 9, что они опираются на соответствующее основание паза, и таким образом диски 3 располагаются с возможностью вращения. Вращение дисков 3 ограничено боковыми сторонами пазов 10 с геометрическим замыканием, причем диски могут повернуться на определенный угол, прежде чем болты 9 коснутся соответствующих боковых сторон. При помощи двух пружин, вставленных в корпус 1 и закрепленных в данном случае с внутренней стороны на удлиненных сторонах пазов 10 (вверху фиг.1а), диски 3 предварительно напряжены в показанном на фигурах 1,2 нормальном положении А, фиксируемом сенсорным устройством 8.
На фигурах 1a, 1b показано тормозное устройство в расторможенном состоянии. Для этого электромагниты оттягивают анкерные диски 4 против напряжения пружины 7 сжатия от тормозных дисков 5, вследствие этого свободно вращающихся с рабочим валом 2. В этом состоянии промежуточные диски 3 удерживаются указанными пружинами в своем нормальном положении, что свидетельствует о штатном режиме эксплуатации.
На фигурах 2а, 2b представлено тормозное устройство в включенном состоянии. Для этого электромагниты уже обесточены энергией, и, таким образом, анкерные диски 4 нагружаются пружинами 7 нормальной силой FN в направлении второй осевой степени свободы у. С такой же нормальной силой анкерные диски 4 прижимают промежуточные диски 3 к тормозным дискам 5, смещающимся вследствие этого в осевом направлении и прижимаемым с этой же нормальной силой к корпусу 1.
Под действием этой нормальной силы FN происходят первый, второй, в частности, третий скользящий контакт первой плоскости 6.1 касания - между корпусом 1 и тормозным диском 5, второй плоскости 6.2 касания - между тормозным диском 5 и промежуточным диском 3, в частности, третьей плоскости 6.3 касания - между промежуточным диском 3 и анкерным диском 4. Причем при первом и втором скользящем контакте вследствие вращающегося рабочего вала 2 с самого начала преобладает трение скольжения, поэтому возникает первая, в частности, вторая сила
трения (в частности, вращающий момент трения) FRiG=µiG×FN (i=1,2). При этом µ1G означает коэффициент трения скольжения во время первого, в частности, второго скользящего контакта.
Во время третьего скользящего контакта сначала преобладает трение сцепления, поскольку промежуточный диск 3 и анкерный диск 4 находятся относительно друг друга в неподвижном состоянии. В этом случае максимальное значение действующей силы FR3max выражается FR3maxH=µ3H×FN, где µ3h означает коэффициент трения сцепления во время третьего скользящего контакта. Он подобран таким, чтобы максимальная величина третьей силы трения сцепления была больше второй силы трения скольжения:


Промежуточный элемент 3 удерживается в своем нормальном положении А за счет
резерва силы сцепления (FR3maxH-FR2G), в то время как тормозной диск 5 скользит по нему. Когда рабочий вал 2 окончательно остановлен (фиг.2), то также изменяется и вид трения первого и второго скользящего контакта - от трения скольжения к трению
сцепления. Поскольку выбраны коэффициенты трения сцепления µ1H=µ2H>>µ3H, то теперь максимальная величина второй силы трения FR2max больше максимальной величины третьей силы трения FR3max. Здесь следует обратить внимание на то, что для упрощения в каждом случае речь идет об одном коэффициенте трения µiH, µiG. На самом деле каждый из этих коэффициентов трения имеет диапазон разброса, в частности допуск. Например, определение µ3H>µ2G следует понимать так, что значение µ3H, независимо от его положения допуска, больше значения µ2G, независимо от его положения допуска. Исходя из этого, предпочтительно выбирать такие границы допуска, чтобы описанные соотношения касались также сил трения, в частности коэффициентов трения у границ допуска для обеспечения даже при возникающих на практике разбросов внутри допуска функционирования тормозного устройства в рамках изобретения.
Возможная неисправность тормозного устройства состоит в том, что оно вследствие неполадок не размыкается при дальнейшем приведении в действие рабочего вала. В этом случае рабочий вал 2 оказывает воздействие через тормозной диск 5, исходя из описанного прежде со ссылкой на фиг.2 положения остановки, на еще замкнутые первый, второй и третий скользящие контакты. Поскольку максимальное значение третьей силы торможения вследствие выбранного соотношения коэффициентов трения µ1H=µ2H>>µ3H самое небольшое, то сначала сила трения сцепления третьего скользящего контакта изменяется на силу трения скольжения, а промежуточный диск 3 начинает поворачиваться относительно анкерного диска 4. Причем промежуточный элемент 3 прокручивается в показанное на фиг.3 положение торможения В, фиксируемое сенсорным устройством 8. Сенсорное устройство 8 передает затем информацию о состоянии на логический блок 11 слежения. Блок 11 слежения обрабатывает полученный от сенсорного устройства 8 сигнал вместе с другими сигналами, например, о движении или скорости движущегося тела, в частности, подвижного элемента 2 и/или торможении, сигнализирующем о включенном, или выключенном состоянии тормозной системы, и передает возможную информацию о неисправности на блок управления подъемника (не показан), останавливающий привод рабочего вала 2, и, таким образом, предохраняет тормозные диски 5 от прогорания, и выдает соответствующее сервисное сообщение.
Другой возможной неисправностью тормозного устройства может являться недостаток производимой тормозным устройством удерживающей силы. Опять же, исходя из описанного со ссылкой на фиг.2 положения остановки, максимальным значением производимой тормозным устройством в нормальном положении А силы торможения FRmax при варианте выполнения изобретения с двумя тормозными дисками, считается: 
Как изложено прежде, вместо линейных сил в уравнения можно вставить также крутящие моменты вследствие степени свободы вращения ϕ. Если теперь сил торможения не достаточно, то рабочий вал 2 начинает вращаться. Поскольку максимальная величина третьей силы трения вследствие подбора коэффициентов трения µ1H=µ2H>>µ3H самая маленькая, то сначала сила трения сцепления третьего скользящего контакта изменяется на силу трения скольжения, в то время как во втором скользящем контакте по-прежнему действует трение сцепления. Промежуточный элемент 3 начинает поворачиваться относительно анкерного диска 4. Причем промежуточный элемент 3 снова поворачивается в показанное на фиг.3 положение торможения В, регистрируемое сенсорным устройством 8. Оно выдает затем, как описано прежде, сигнал о неисправности, например, через логический блок слежения на блок управления подъемника (не показан).
В положении торможения В (фиг.3) геометрическое замыкание между болтом 9 и боковыми сторонами паза 10 препятствует дальнейшему прокручиванию промежуточного элемента 3, и вследствие этого он неподвижно фиксируется относительно корпуса 1 с первой степенью свободы ϕ. Теперь это дает возможность промежуточному элементу 3 передать большую по величине силу трения сцепления на тормозной диск 5, тем самым общая составляющая силы торможения повышается до значения: 
Поскольку тормозное устройство рассчитано так, что произведенная в обычном режиме в первом и третьем скользящих контактах сила торможения согласно уравнению (6) достаточна для остановки рабочего вала 1, то резерв безопасности складывается из:

На фиг.4 показан второй вариант выполнения предложенного тормозного устройства в расторможенном состоянии, в поперечном разрезе. Это тормозное устройство предусмотрено для подъемника, в котором корпус 1, который может быть закреплен на кабине лифта (не показана), перемещается с первой степенью свободы х вдоль тормозной направляющей 2.
В выключенном состоянии тормозного устройства (фиг.4) электромагнит притягивает анкерный диск 4 в корпус 1, преодолевая напряжение пружины 7 сжатия во второй степени свободы у, поэтому корпус 1 свободно может скользить вдоль тормозной направляющей.
Для торможения кабины лифта (фиг.5) электромагнит (или другое подходящий для этого размыкающий привод) отключается, пружина 7 сжатия прижимает анкерный диск 4 во второй степени свободы у нормальной силой FN к промежуточному элементу 3, установленный с возможностью продольного перемещения в первой степени свободы х, и удерживает в нормальном положении А (фиг.4, 5) расположенными по бокам пружинами сжатия. Вследствие этого также и промежуточный элемент 3 оказывает давление нормальной силой FN на тормозную направляющую 2, которая, со своей стороны, прижимается к корпусу 1. При этом в первой плоскости касания 6.1, где тормозная направляющая 2 прижимается к корпусу, во второй плоскости касания 6.2, где промежуточный элемент 3 касается тормозной направляющей 2 и в третьей плоскости касания 6.3, где анкерный диск 4 и промежуточный элемент 3 в контакте друг с другом, - замыкаются первый, второй и, в частности, третий скользящий контакт. Причем в первом и втором скользящем контакте, вследствие двигающейся относительно корпуса 1 тормозной направляющей 2 присутствует трение скольжения, в третьем скользящем контакте, вследствие покоящихся относительно друг друга промежуточного элемента 3 и анкерного элемента 4 - трение сцепления.
Как и в первом примере выполнения изобретения выбраны коэффициенты трения сцепления: µ1H=µ2H>>µ3H. Тем не менее, коэффициенты трения скольжения µ1G=µ2G первой и второй плоскости касания меньше коэффициента трения сцепления µ3H третьей плоскости касания. Поскольку все плоскости касания нагружены одинаковой нормальной силой FN, силы трения скольжения первого и второго скользящего контакта меньше максимальной величины силы трения сцепления третьего скользящего контакта:


Поэтому тормозная направляющая 2 скользит в первом и втором скользящем контакте, а промежуточный элемент 3 остается в своем предварительно напряженном пружинами сжатия нормальном положении А (фиг.5). В неподвижном состоянии состояние первого и второго скользящего контакта изменяется от трения скольжения к трению сцепления, общая составляющая силы трения, с которой корпус 1 удерживает тормозную направляющую 2, ограничена в первом и третьем скользящих контактах:

Как и в первом примере выполнения изобретения, блокировка тормозного устройства, не разъединяющегося, несмотря на движение корпуса 1 относительно тормозной направляющей 2, также как и слишком малая общая составляющая силы торможения в соответствии с уравнением (6''), опять же приводит к захвату промежуточного элемента 3 тормозной направляющей 2 в первой степени свободы х, пока промежуточный элемент 3 не будет остановлен верхним выступом анкерного элемента 4 (не показан). При этом сенсорное устройство 8 регистрирует переход промежуточного элемента из нормального положения А (фиг.5) в это положение торможения В (фиг.6) и выдает сигнал о неисправности. Как только промежуточный элемент будет остановлен (не показанным) выступом в первой степени свободы х напротив анкерного элемента 4, во второй плоскости касания 6.2 действует против направления движения вторая сила трения FR2, увеличивающая общую составляющую силы трения от FR=(µ1+µ3)×FN до FR=(µ1+µ2)×FN.
В первом и втором примерах выполнения изобретения максимальная величина второй и третьей силы трения реализуется за счет выбранного в каждом случае соответствующих коэффициентов трения µ2, µ3, в частности коэффициентов трения сцепления µ2H, µ3H.В качестве альтернативы, или дополнительно можно добиться различных значений максимальной величины силы торможения к тому же и за счет того, что третья плоскость 6.3 касания находится под углом к направлению действия нормальной силы. С этой целью на фиг.7 показаны в виде принципиальной схемы приложенные к промежуточному элементу 3 силы при нагрузке его общей составляющей нормальной силы FN. Представленную на фиг.1 схему можно, например, применить к первому, или второму примеру выполнения изобретения, причем в этом случае одинаковые обозначения соответствуют одинаковым элементам, в частности нажимной элемент 4 на фиг.7, например, соответствует анкерному диску 4 в первом примере, или анкерному элементу 4 - во втором.
Прежде всего, принимается, что удерживаемый подвижный элемент 2 под влиянием внешних сил, например, нагрузки кабины лифта, в первой степени свободы х стремится переместиться в положительном направлении (вверх на фиг.7). Затем при нагрузке нажимного элемента 4 нормальной силой FN на второй плоскости 6.2 касания возникает направленная противоположно сила трения FR2, такой же величины, как сумма остальных приложенных к подвижному элементу 2 сил, однако имеющая максимальную величину FR2max=µ2H×FN.
Нормальная сила FN, действующая на наклоненную к ней под углом (π-α) третью плоскость 6.3 касания, раскладывается на две составляющие, причем одна составляющая FN×sin(α) направлена перпендикулярно к третьей плоскости 6.3 касания, другая FN×cos(α) ориентирована по касательной к ней. Максимально действующая в третьей плоскости 6.3 касания третья сила трения образуется из одной составляющей, выраженной в FR3max=µ3H×sin(α)×FN. Таким образом, подбирая подходящий угол наклона α можно, например, при одинаковом значении коэффициента силы трения сцепления добиться меньшего значения максимально действующей третьей силы трения. Если перенести действие этой силы трения еще и в первую степень свободы х, то в таком случае движению промежуточного элемента 3 в первой степени свободы будет еще максимально противодействовать только сила трения сцепления: FR3max=µ3H×sin(α)×FN.
Далее, как это изображено на фиг.7, движению промежуточного элемента 3 относительно нажимного элемента в первой степени свободы х в положительном направлении (вверх, на фиг.7) дополнительно противодействует составляющая FN×cos(α), увеличивая в совокупности действующую максимальную третью силу трения. При движении в отрицательном направлении (вниз, на фиг.7) эти составляющие FN×cos(α), наоборот, уменьшают действующую максимальную третью силу трения, поэтому в обоих направлениях движения возникают разные максимальные величины третьих сил трения. Это можно предпочтительно использовать, если, например, удерживаемая тормозным устройством кабина лифта сбалансирована только частично, то есть подвижный элемент 2 должен сильнее удерживаться в одном направлении движения, чем в другом.
В дальнейшем при смещении промежуточного элемента 3 относительно нажимного элемента 4 неизбежно происходит изменение пути подачи вдоль степени свободы у. Это изменение становится причиной приложения или снятия нормальной силы FN в соответствии с силовой характеристикой воздействующего подающего элемента, например, пружины сжатия 7 (фигуры 4-6). Вследствие этого сила торможения может находиться под влиянием соответственно направления движения, или направления торможения.
В примерах выполнения изобретения приведены ссылки на согласование коэффициентов трения скольжения и трения сцепления поверхностей трения, необходимого для надежного обнаружения неисправностей, как исключительно при удержании, так и торможении и последующем удержании. Это достигается соблюдением условия:  .
.
Это не обязательно, поскольку в настоящее время во многих случаях применения тормозного устройства оно используется обычно только для удержания, в частности, кабины лифта в неподвижном положении. Использование тормозного устройства для торможения требуется только в случае возникновения неисправности и само по себе представляет собой уже нештатную ситуацию. В этих отдельных случаях не требуется, чтобы промежуточный элемент 3 оставался в своем нормальном положении. Он вообще может быть смещен из нормального положения в положение торможения, что затем позволяет использовать силу торможения соответственно большей величины:

Этого можно добиться, подобрав коэффициенты трения µ3H, µ3G третьей плоскости касания значительно меньше коэффициентов трения µ2H, µ2G второй плоскости касания  .
.
Разумеется, что возможны и комбинации представленных вариантов выполнения изобретения. Так, например, можно комбинировать использование нескольких вторых и третьих плоскостей касания с первой плоскостью касания, вследствие чего дополнительно увеличивается резерв безопасности.
В предпочтительном варианте выполнения изобретения тормозное устройство встроено в привод, или установлено на нем. Привод содержит один или несколько ведущих дисков, объединенных с приводным валом, или установленных на нем. Приводной вал приводится в действие двигателем и удерживается тормозным устройством в неподвижном состоянии, или, при необходимости, затормаживается им. В отдельных случаях между двигателем и приводным валом может быть размещена передача. Привод содержит также тормозное устройство, разделенное, как правило, на два, по существу, идентичных конструктивных элемента. Каждый из элементов в своем положении торможения (В) в состоянии самостоятельно останавливать и удерживать движущееся тело. В соответствии с первым вариантом выполнения привода оба конструктивных элемента собраны в одно тормозное устройство и размещены в конце приводного вала. Приводной вал соответствует в этом варианте выполнения изобретения подвижному элементу (2). Такой способ расположения является экономичным, поскольку тормозное устройство может быть заранее установлено, например, как комплектующий элемент.
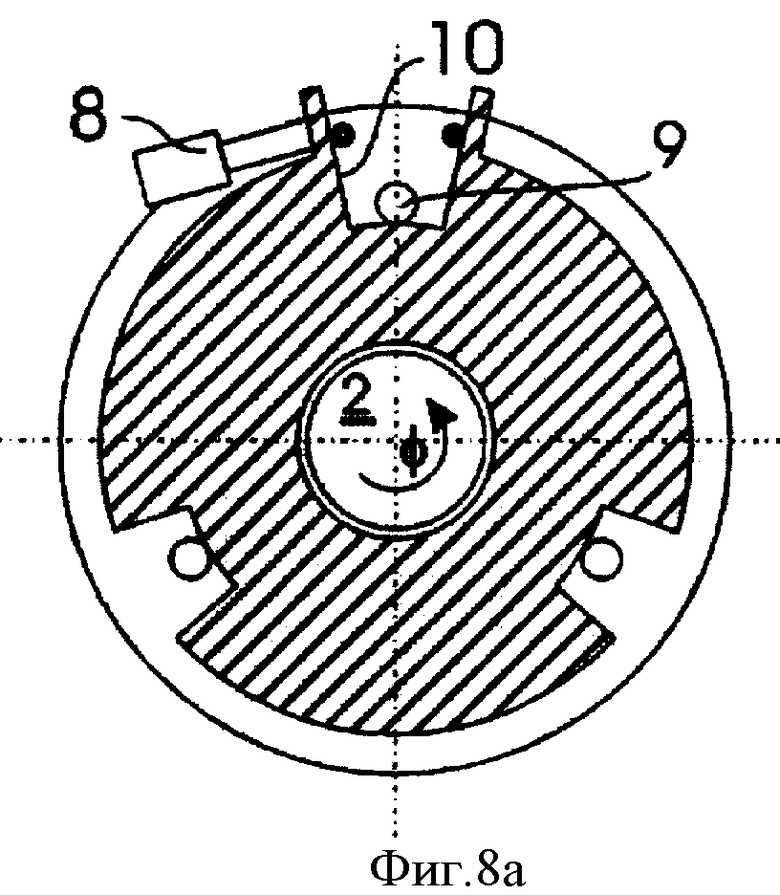
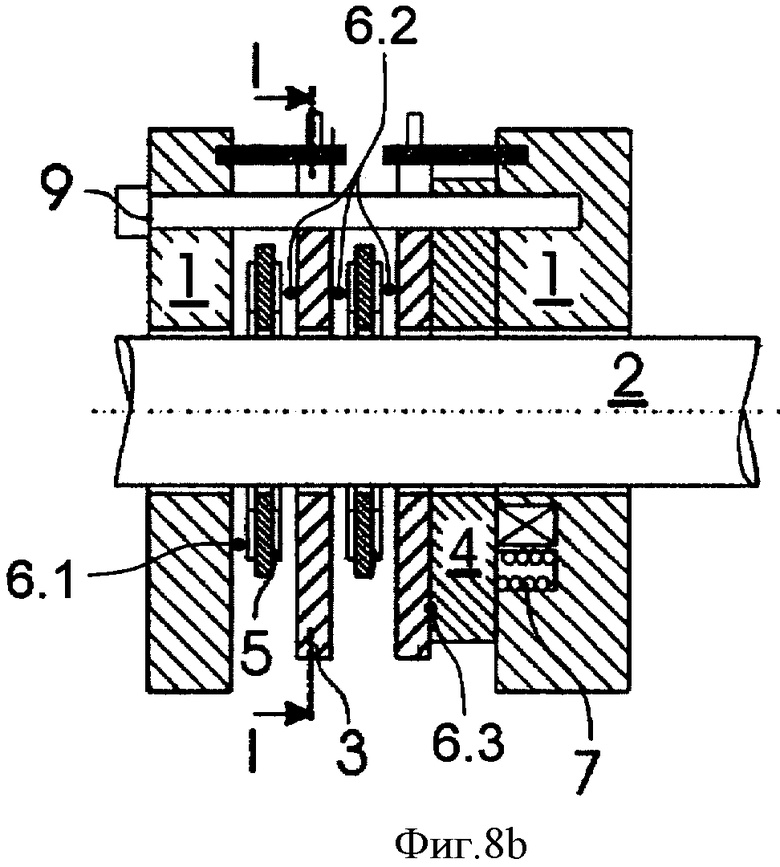
Согласно альтернативному варианту выполнения привода оба элемента тормозного устройства установлены на обоих концах тормозного вала. Это значит, что ведущий вал расположен между элементами тормозного устройства. Поэтому при торможении тормозной, или удерживающий момент распределяется от ведущего вала на оба элемента. Это позволяет получить значительно лучшее распределение энергии на ведущем валу и снизить риск отказа тормозного устройства из-за разрыва ведущего вала. В идеальном варианте эффективность торможения между нормальным положением и положением торможения возрастает в два раза. Это происходит тогда, когда коэффициент трения µ3 третьей плоскости касания приблизительно равен нулю. При применении тормозного устройства с несколькими включающимися последовательно тормозными устройствами, как это показано, например, на фигурах 8а и 8b, можно влиять на увеличение силы торможения между нормальным положением и положением торможения. Например, расположив друг за другом несколько тормозных дисков (5) и промежуточных элементов (1), или неподвижных элементов (1), можно добиться желаемого повышения эффективности торможения за счет выполнения свободного хода пути отдельных промежуточных, в частности, неподвижных элементов. Например, согласно фигурам 8а и 8b размещены три вторые плоскости (6.2) касания, взаимодействующие только в положении торможения с первой плоскостью (6.1) касания. Если пренебречь силой трения третьей плоскости (6.3) касания, то получаем учетверение силы торможения по достижении положения торможения. Специалист может составить любые комбинации.
Главное преимущество изобретения состоит в использовании рационального логического блока слежения, контролирующего исправную работу тормозного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКОЕ ТОРМОЗНОЕ УСТРОЙСТВО ПРИВОДНОГО ВАЛА | 2012 |
|
RU2559054C2 |
| ТОРМОЗ | 1995 |
|
RU2188346C2 |
| Тормозное устройство | 1980 |
|
SU894254A1 |
| ТОРМОЗНОЕ УСТРОЙСТВО ПАССАЖИРСКОГО КОНВЕЙЕРА И ПАССАЖИРСКИЙ КОНВЕЙЕР | 2007 |
|
RU2461748C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО РУЧНОЙ МАШИНЫ | 2012 |
|
RU2626109C2 |
| КЛЕЩЕВОЕ ТОРМОЗНОЕ УСТРОЙСТВО | 2012 |
|
RU2568622C2 |
| ПНЕВМАТИЧЕСКИ УПРАВЛЯЕМЫЙ ДИСКОВЫЙ ТОРМОЗНОЙ МЕХАНИЗМ С УПРАВЛЯЮЩИМ ПОЛЗУНОМ | 2009 |
|
RU2514604C2 |
| ТОРМОЗНОЙ УЗЕЛ И ЭЛЕМЕНТ СИСТЕМЫ ЭКСТРЕННОГО ТОРМОЖЕНИЯ И СПОСОБ ИСПОЛЬЗОВАНИЯ ТОРМОЗНОГО УЗЛА | 2006 |
|
RU2390666C2 |
| ДИСКОВЫЙ ТОРМОЗНОЙ МЕХАНИЗМ ДЛЯ КОММЕРЧЕСКОГО АВТОМОБИЛЯ И КОМПЛЕКТ ТОРМОЗНЫХ КОЛОДОК | 2016 |
|
RU2683911C1 |
| КЛЕЩЕВОЕ ТОРМОЗНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2557097C2 |
Тормозное устройство содержит неподвижный элемент (1), подвижный элемент (2), перемещающийся относительно неподвижного элемента в первой степени свободы, причем между неподвижным элементом (1) и подвижным элементом (2) посредством действующей во второй степени свободы управляемой нормальной силой происходит выборочно первый скользящий контакт в первой плоскости касания, во время которого первая сила трения противодействует движению подвижного элемента относительно неподвижного элемента, и по меньшей мере, промежуточный элемент (3), а также промежуточный элемент (4). Между подвижным элементом (2) и, по меньшей мере, промежуточным элементом (4) под действием нормальной силы во второй плоскости касания происходит второй скользящий контакт, во время которого вторая сила трения противодействует движению подвижного элемента относительно промежуточного элемента. По меньшей мере, промежуточный элемент (3) перемещается в первой степени свободы относительно неподвижного элемента между нормальным положением и положением торможения, причем промежуточный элемент упруго подпружинен в нормальном положении. Указанное устройство входит в конструкцию подъемника. Группа изобретений обеспечивает повышение безопасности. 3 н. и 15 з.п. ф-лы, 12 ил.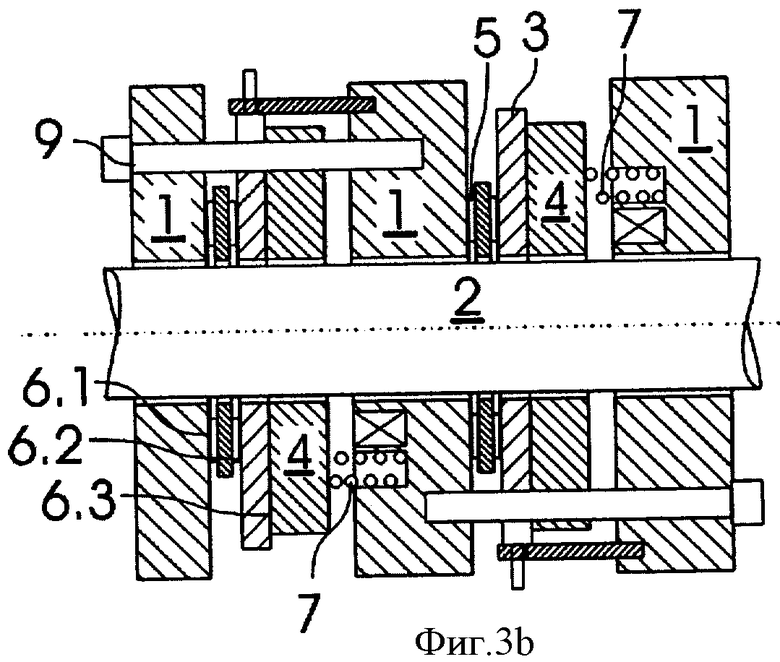
1. Тормозное устройство для удержания движущегося тела в неподвижном состоянии и при необходимости для замедления движения движущегося тела с
- неподвижным элементом (1),
- подвижным относительно неподвижного элемента в первой степени свободы (φ, х) в соответствии с направлением движения движущегося тела элементом (2), причем между неподвижным элементом (1) и подвижным элементом (2) благодаря действующей во второй степени свободы (у) нормальной силе (FN) происходит первый скользящий контакт в первой плоскости (6.1) касания, причем во время первого скользящего контакта движению подвижного элемента относительно неподвижного элемента (1) противодействует первая сила трения (FR1);
- промежуточным элементом (3), перемещающимся во второй степени свободы (у) в направлении подвижного элемента (2), причем между подвижным элементом (2) и промежуточным элементом (3) благодаря действию нормальной силы (FN) во второй плоскости (6.2) касания происходит второй скользящий контакт, причем во время второго скользящего контакта движению подвижного элемента относительно промежуточного элемента противодействует вторая сила трения (FR2), при этом промежуточный элемент (3) в первой степени свободы (φ, х) передвигается относительно неподвижного элемента (1) между нормальным положением (А) и положением торможения (В), причем промежуточный элемент (3) предварительно напряжен в нормальном положении (А) и его движение за положением торможения (В) застопорено, отличающееся тем, что указанное тормозное устройство содержит:
- нажимной элемент (4), неподвижный в первой степени свободы (φ, х) по отношению к неподвижному элементу (1) и подаваемый во второй степени свободы (у) в направлении подвижного элемента (2), причем между нажимным элементом (4) и промежуточным элементом (3) в состыкованном положении происходит третий скользящий контакт под действием нормальной силы (FN) в третьей плоскости (6.3) касания, в то время как третья сила трения (FR3) противодействует движению промежуточного элемента (3) относительно нажимного элемента (4); причем вторая и третья плоскости (6.2, 6.3) касания выполнены так, что максимальная величина второй силы трения (FR2max) второй плоскости (6.2) касания больше максимальной величины третьей силы трения (FR3max) третьей плоскости (6.3) касания.
2. Тормозное устройство по п.1, отличающееся тем, что тормозное устройство содержит сенсорное устройство (8), служащее для получения информации о нормальном положении или положении торможения (А, В) промежуточного элемента (3).
3. Тормозное устройство по п.1, отличающееся тем, что вторая плоскость (6.2) касания имеет большее значение коэффициента трения (µ), в частности, более высокое значение коэффициента трения сцепления (µн), чем третья плоскость (6.3) касания.
4. Тормозное устройство по пп.1-3, отличающееся тем, что третья плоскость (6.3) касания находится под углом к направлению действия нормальной силы (FN).
5. Тормозное устройство по п.4, отличающееся тем, что промежуточный элемент (3) и/или нажимной элемент (4) движутся под действием нормальной силы (FN) во второй степени свободы (у) таким образом, что происходят первый, второй и третий скользящие контакты.
6. Тормозное устройство по п.4, отличающееся тем, что оно содержит еще тормозной элемент (5), неподвижный в первой степени свободы (φ) по отношению к подвижному элементу (2), а под действием нормальной силы (FN) во второй степени свободы (у) перемещается так, что происходят первый, второй и третий скользящие контакты.
7. Тормозное устройство по п.4, отличающееся тем, что подвижный элемент (2) и неподвижный элемент (1) так перемещаются относительно друг друга под действием нормальной силы (FN) во второй степени свободы (у), в частности, изменяют форму, что происходят первый, второй и третий скользящие контакты.
8. Тормозное устройство по любому из пп.1-3, 5-7, отличающееся тем, что нажимной элемент (4) подпружинен, в частности, упругим элементом (7) с нормальной силой (FN) и размыкается в зависимости от выбора посредством электромагнита и/или гидравлического устройства.
9. Тормозное устройство по любому из пп.1-3, 5-7, отличающееся тем, что оно содержит несколько промежуточных элементов (3), а также относящихся к ним нажимных элементов (4), причем между каждым промежуточным элементом (3) и подвижным элементом (2) под действием нормальной силы (FN) происходит второй скользящий контакт во второй плоскости (6.2) касания, а между каждым промежуточным элементом (3) и относящимся к нему нажимным элементом (4) под действием нормальной силы (FN) - третий скользящий контакт на третьей плоскости (6.3) касания.
10. Подъемник с тормозным устройством по любому из пп.1-9, отличающийся тем, что один из элементов, неподвижного (1) и подвижного (2), размещен инерционно неподвижно внутри подъемника, а другой из элементов, неподвижного (1) и подвижного (2), так соединен с движущимся телом, в частности, с кабиной подъемника, что он может удерживать и/или тормозить ее.
11. Подъемник по п.10, отличающийся тем, что нормальная сила (FN) рассчитана так, что вызванной нормальным положением (А) тормозного устройства силы сцепления достаточно для надежного удержания движущего тела с допустимой нагрузкой.
12. Подъемник по п.11, отличающийся тем, что нормальная сила (FN) рассчитана так, что вызванной положением торможения (В) тормозного устройства силы скольжения достаточно для надежного торможения движущего тела с допустимой нагрузкой.
13. Подъемник по одному из пп.10-12, отличающийся тем, что вызванная тормозным устройством в положении торможения (В) сила скольжения, по меньшей мере, на 50% больше произведенной тормозным устройством в нормальном положении (А) силы сцепления.
14. Способ получения информации о функционировании тормозного устройства по одному из пп.1-9, отличающийся тем, что функционирование контролируют посредством сенсорного устройства (8), причем с помощью сенсорного устройства (8) определяют положение промежуточного элемента (3).
15. Способ по п.14, отличающийся тем, что функционирование тормозного устройства контролируют с помощью логического блока (11) слежения, в котором обрабатываются сигналы, поступающие от сенсорного устройства (8), сигналы управления тормозным устройством и о положении перемещения подвижного элемента (2).
16. Способ по п.14 или 15, отличающийся тем, что сигнал о неисправности поступает, когда логический блок слежения фиксирует:
- что сигнал управления тормозным устройством показывает "включен", положение перемещения подвижного элемента (2) - "0", а промежуточный элемент (3) находится в своем положении торможения (В), или
- сигнал управления тормозным устройством показывает "выключен", положение перемещения подвижного элемента (2) - "≠0", а промежуточный элемент (3) находится в своем положении торможения (В).
17. Способ по п.14 или 15, отличающийся тем, что сигнал о штатном режиме работы поступает, когда логический блок слежения фиксирует:
- что сигнал управления тормозным устройством показывает "включен", положение перемещения подвижного элемента (2) - "0", а промежуточный элемент (3) находится в своем нормальном положении (А), или
- что сигнал управления тормозным устройством показывает "включен", положение перемещения подвижного элемента (2) - "≠0", а промежуточный элемент (3) находится в своем положении торможения (В), или
- сигнал управления тормозным устройством показывает "выключен", положение перемещения подвижного элемента (2) - "≠0", а промежуточный элемент (3) находится в своем нормальном положении (В).
| ЕР 1431230 А1, 23.06.2004 | |||
| US 6092630 А, 25.07.2000 | |||
| Способ лечения больных розацеа, осложненной демодикозом | 1988 |
|
SU1655506A1 |
| GB 1488374 А, 12.10.1977 | |||
| Способ контроля приводимого в действие за счет давления тормозного устройства на перегрузку и устройство для его осуществления | 1990 |
|
SU1831610A3 |
| Рельсовый тормоз | 1990 |
|
SU1763274A1 |

