Изобретение относится к области строительства и предназначено для полуавтоматической укладки плитки на горизонтальную поверхность по требованиям ТУ, что повышает производительность труда в 25 раз, улучшает культуру производства и уменьшает трудозатраты.
Известно полуавтоматическое устройство «Аппарат-плиткоукладчик Черепановых» патентообладателей Черепанова В.Д. (RU), Черепанова А.Д. (RU), Черепанова С.В. (RU)., (см. патент на изобретение №2374408, МПК E04F 21/20).
Данное устройство имеет ряд недостатков, а именно для перемещения устройства требуется направляющий рельс, который необходимо крепить к плоскости во избежание сбоя прямолинейности по всей длине укладки, выверять уровень рельса относительно горизонта; для установки второго ряда укладки требуется специальная линейка, а при работе на малых площадях, в некоторых случаях, возникает необходимость укорачивания рельса, что приводит к потере рабочего времени. Иногда платформа-шаблон, жестко закрепленная с основным каркасом и прочно связанная одной конструкцией с рельсом, не всегда точно ложится на горизонтально уложенный раствор из-за дефектов рельса, в особенности на стыках рельсов.
Предложенное изобретение устраняет все указанные недостатки, уменьшает количество точных регулировок устройства, что, в конечном итоге, увеличивает производительность труда и облегчает обслуживание устройства.
Данная техническая задача решается тем, что основное движение автоматического устройства в продольном и поперечном направлении осуществляется не по рельсу, а в определенном положении устройства - на паре колес, расположенных перпендикулярно друг другу и закрепленных на раме устройства через подвижную каретку с разносом высоты относительно друг друга, а вспомогательное поперечное движение осуществляется через систему рычагов, перемещающих рамку вокруг оси рамки, на которой нежестко, имея степени свободного движения в вертикальных и горизонтальных плоскостях, крепится платформа-шаблон, имеющая крепления под лазерные указатели, делители, перпендикулярно расположенные, закрепленные неподвижно, и делители, свободно крепящиеся к платформе-шаблону с помощью магнитных держателей, в количестве от 1 до 10, поворот же всего устройства до полного упора в адгезив, заранее нанесенный на подготовленную поверхность пола с уложенными в платформу-шаблон плитками, прижатыми к платформе вакуумом, осуществляется последовательно через неполный поворот вокруг оси платформы- шаблона и через нижнюю точку упора продольных колес.
Изобретение поясняется чертежами, где:
На фиг.1 изображен общий вид устройства сбоку.
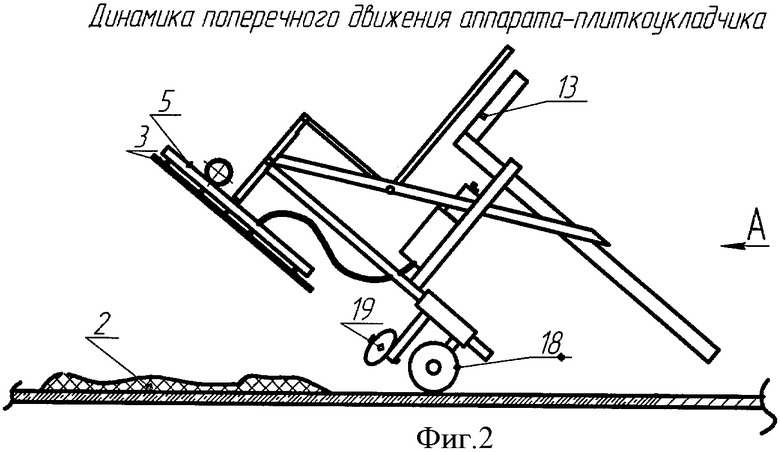
На фиг.2. изображена динамика поперечного движения аппарата-плиткоукладчика.
На фиг.3. изображена динамика продольного движения аппарата-плиткоукладчика.
На фиг.4. изображена динамика дополнительного поперечного движения аппарата-плиткоукладчика
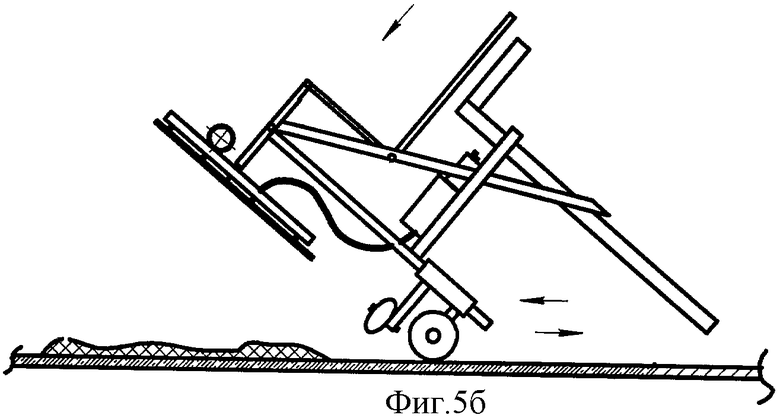
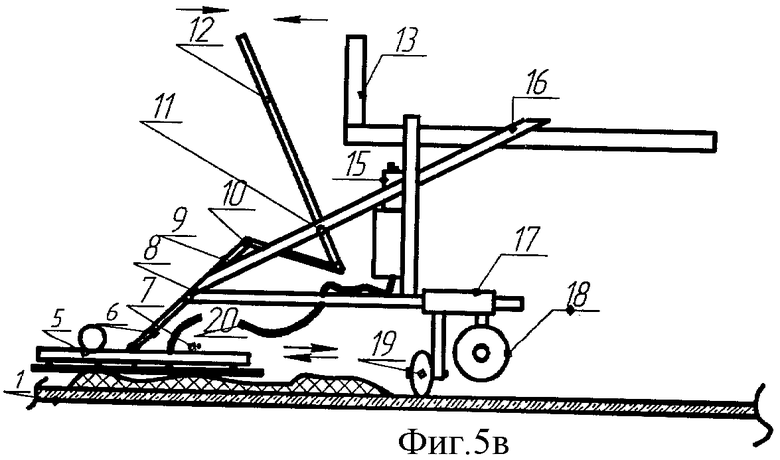
На фиг.5., 5а, 5б, 5в изображен способ укладки напольной плитки в динамике движения аппарата-плиткоукладчика.
На фиг.6. изображена платформа-шаблон «Аппарата-плиткоукладчика
Черепановых-2».
Устройство «Аппарат-плиткоукладчик Черепановых-2» выполнен следующим образом: имеется рама устройства (фиг.1, п.16), на которой крепятся: рычаг противовеса 13, вакуумный насос 14 со шлангом 20, пульт управления 15, две пары колес 18, 19, расположенных перпендикулярно друг другу и закрепленных на раме устройства 16 через подвижную каретку 17 с разносом высоты относительно друг друга, система рычагов с рычагом перемещения рамки 12, первой осью системы рычагов поперечного движения платформы-шаблона 10 и второй осью системы рычагов поперечного перемещения платформы-шаблона, перемещающих рамку 9 вокруг оси рамки 8, на которой нежестко со степенью свободного движения в вертикальных и горизонтальных плоскостях крепится платформа-шаблон 5 с вибратором 6, имеющая крепления под лазерные указатели (фиг.3, п.21). На платформе-шаблоне (фиг.6) крепятся делители 3, перпендикулярно расположенные, закрепленные неподвижно, и делители 4 в количестве от 1 до 10, которые свободно крепятся к платформе-шаблону с помощью магнитных держателей 5. На ней также размещены присоски 2 для крепления плиток.
Работа устройства. «Аппарат-плиткоукладчик Черепановых-2» действует следующим образом. Рабочий, осуществляющий укладку плитки с помощью аппарата, устанавливает раму устройства 16 в устойчивое положение загрузки плитки (фиг.5). Уложив в платформу-шаблон плитки, включает на пульте управления (фиг.1, п.15) вакуумный насос 14, в результате чего плитка присасывается вакуумом через присоски 4 плотно к шаблону. Закрепленную таким образом и уложенную в шаблон плитку 3 рабочий разворачивает вместе с платформой-шаблоном вокруг оси 7. В том же направлении рабочий поворачивает и раму устройства (фиг.5, 5а) и двигает все устройство (фиг.5б) к месту укладки. Опустив платформу-шаблон до упора в заранее нанесенный на пол (фиг.1, п.1) адгезив 2, включает вибратор 6 и через несколько секунд выключает. Затем выключает вакуумный насос 14 и, нажимая на рычаг противовеса 13, приподнимает освободившуюся платформу-шаблон над адгезивом. При необходимости, устройство передвигают в продольном направлении на колесах продольного движения 19, а для поперечного движения применяют дополнительное движение платформы-шаблона с помощью рычага (фиг.5в., п12).
После завершения продольной укладки для перемещения аппарата для укладки нового двойного ряда устройство откатывается на новую позицию на колесах 18 или 19, приподняв платформу-шаблон рычагом противовеса 13.
Изобретение по сравнению с ближайшим техническим решением обеспечивает укладку плитки различных размеров благодаря магнитному креплению делителей. Настройка точности укладки второго ряда плиток возможна без применения специальных линеек; возникает простота обслуживания аппарата. Уменьшается количество деталей конструкции, а за счет работы без направляющего рельса обеспечивается большая маневренность и возможность работы на малых площадях, при этом существенно уменьшается металлоемкость всего устройства.
На фиг.1 изображен общий вид устройства сбоку.
п.1. пол.
п.2. адгезив.
п.3. плитка.
п.4. присоски.
п.5. платформа- шаблон.
п.6. вибратор.
п.7. ось платформы-шаблона.
п.8. ось рамки.
п.9. рамка.
п.10. первая ось системы рычагов поперечного перемещения платформы-шаблона.
п.11. вторая ось системы рычагов поперечного перемещения платформы-шаблона.
п.12. рычаг перемещения рамки.
п.13. рычаг противовеса.
п.14. вакуумный насос.
п.15. пульт управления.
п.16. рама устройства.
п.17. каретка подвижная.
п.18. колесо поперечного движения.
п.19. колесо продольного движения.
п.20. шланг.
п.21. крепление для лазера.
На фиг.2. изображена динамика поперечного движения аппарата-плиткоукладчика.
п.2. адгезив
п.3. плитка.
п.5. платформа-шаблон.
п.13. рычаг противовеса.
п.18. колесо поперечного движения.
п.19. колесо продольного движения.
На фиг.3. изображена динамика продольного движения аппарата-плиткоукладчика.
п.5. платформа-шаблон.
п.6. вибратор.
п.12. рычаг перемещения рамки.
п.13. рычаг противовеса.
п.14. вакуумный насос.
п.15. пульт управления.
п.16. рама устройства.
п.18. колесо поперечного движения.
п.19. колесо продольного движения.
п.21. крепление для лазера.
На фиг.4. изображена динамика дополнительного поперечного движения аппарата-плиткоукладчика.
п.1. пол.
п.5. платформа-шаблон.
п.6. вибратор.
п.7. ось платформы-шаблона.
п.8. ось рамки.
п.9. рамка.
п.10. первая ось системы рычагов поперечного перемещения платформы-шаблона.
п.11. вторая ось системы рычагов поперечного перемещения платформы-шаблона.
п.12. рычаг перемещения рамки.
п.13. рычаг противовеса.
п.15. пульт управления.
п.16. рама устройства.
п.17. каретка подвижная.
п.18. колесо поперечного движения.
п.19. колесо продольного движения.
п.20. шланг.
На фиг.5., 5а, 5б, 5в изображен способ укладки напольной плитки в динамике движения аппарата-плиткоукладчика.
п.1. пол.
п.5. платформа-шаблон.
п.6. вибратор.
п.7. ось платформы-шаблона.
п.8. ось рамки.
п.9. рамка.
п.10. первая ось системы рычагов поперечного перемещения платформы-шаблона.
п.11. вторая ось системы рычагов поперечного перемещения платформы-шаблона.
п.12. рычаг перемещения рамки.
п.13. рычаг противовеса.
п.15. пульт управления.
п.16. рама устройства.
п.17. каретка подвижная.
п.18. колесо поперечного движения.
п.19. колесо продольного движения.
п.20. шланг.
На фиг.6. изображена платформа-шаблон «Аппарата-плиткоукладчика Черепановых-2».
п.1. платформа.
п.2. присоски.
п.3. делитель неподвижный.
п.4. делитель подвижный.
п.5. держатель магнитный.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ-ПЛИТКОУКЛАДЧИК ЧЕРЕПАНОВЫХ | 2008 |
|
RU2374408C1 |
| Машина для укладки керамогранитной плитки | 2017 |
|
RU2652207C1 |
| Устройство подачи раствора для машины по укладке керамогранитной плитки | 2017 |
|
RU2657297C1 |
| УСТРОЙСТВО ДВУХУРОВНЕВОЙ ИЛИ МНОГОУРОВНЕВОЙ ПАРКОВКИ АВТОМОБИЛЕЙ | 2010 |
|
RU2442870C1 |
| ПАНДУС (ВАРИАНТЫ) | 2013 |
|
RU2540724C2 |
| УСТАНОВКА ДЛЯ КЛАДКИ СТЕН ИЗ КИРПИЧА | 1991 |
|
RU2047714C1 |
| ОКОННАЯ РАМА-СТЕКЛОПАКЕТ ЧЕРЕПАНОВЫХ | 2006 |
|
RU2346130C2 |
| УСОВЕРШЕНСТВОВАННОЕ УСТРОЙСТВО МЕХАНИЗИРОВАННОЙ РАСКЛАДКИ ЖЕЛЕЗНОДОРОЖНЫХ ШПАЛ НА БАЛЛАСТНЫЙ СЛОЙ | 2020 |
|
RU2745765C1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |





Изобретение относится к области строительства и предназначено для полуавтоматической укладки плитки на горизонтальную поверхность. Автоматическое устройство для укладки плиток на горизонтальную поверхность содержит один направляющий рельс, в продольном направлении по которому на каретке свободно перемещается устройство, а перемещение в перпендикулярном направлении для осуществления следующего продольного ряда осуществляется вместе с направляющим рельсом, через опорную тележку, закрепленную на раме устройства, или же ручным способом без применения ее, причем на каретке крепится рама с платформой-шаблоном под размер укладываемой плитки с разделительными полосами, одна из которых является подвижной с магнитным креплением, на шаблоне также расположены присоски для каждой плитки, соединенные посредством шлангов с вакуумным насосом, вибратор, плитки же, уложенные в платформу-шаблон и закрепленные с лицевой стороны посредством вакуума через присоски, поворачиваются вручную вместе с платформой-шаблоном вокруг оси платформы-шаблона с последующим дополнительным поворотом в том же направлении всей рамы до упора платформы-шаблона с плитками в адгезив, нанесенный на подготовленную поверхность пола, а включение-выключение вакуумного насоса и вибратора осуществляется через пульт управления, закрепленный на раме. Основное движение автоматического устройства в продольном и поперечном направлении осуществляется не по рельсу, а в определенном положении устройства на паре колес, расположенных перпендикулярно друг другу и закрепленных на раме устройства через подвижную каретку с разносом высоты относительно друг друга, а вспомогательное поперечное движение осуществляется через систему рычагов, перемещающих рамку вокруг оси рамки, на которой нежестко, имея степени свободного движения в вертикальных и горизонтальных плоскостях, крепится платформа-шаблон, имеющая крепления под лазерные указатели, делители, перпендикулярно расположенные закрепленные неподвижно, и делители, свободно крепящиеся к платформе-шаблону с помощью магнитных держателей в количестве от 1 до 10, поворот же всего устройства до полного упора в адгезив, заранее нанесенный на подготовленную поверхность пола с уложенными в платформу-шаблон плитками, прижатыми к платформе вакуумом, осуществляется последовательно через неполный поворот вокруг оси платформы-шаблона и через нижнюю точку упора продольных колес. Технический результат: увеличение производительности труда и облегчение обслуживания устройства. 9 ил.
Автоматическое устройство для укладки плиток на горизонтальную поверхность, включающее один направляющий рельс, в продольном направлении по которому на каретке свободно перемещается устройство, а перемещение в перпендикулярном направлении для осуществления следующего продольного ряда осуществляется вместе с направляющим рельсом через опорную тележку, закрепленную на раме устройства или же ручным способом без применения ее, причем на каретке крепится рама с платформой-шаблоном под размер укладываемой плитки с разделительными полосами, одна из которых является подвижной с магнитным креплением, на шаблоне также расположены присоски для каждой плитки, соединенные посредством шлангов с вакуумным насосом, вибратор, плитки же, уложенные в платформу-шаблон и закрепленные с лицевой стороны посредством вакуума через присоски, поворачиваются вручную вместе с платформой-шаблоном вокруг оси платформы-шаблона с последующим дополнительным поворотом в том же направлении всей рамы до упора платформы-шаблона с плитками в адгезив, нанесенный на подготовленную поверхность пола, а включение-выключение вакуумного насоса и вибратора осуществляется через пульт управления, закрепленный на раме, отличающееся тем, что основное движение автоматического устройства в продольном и поперечном направлении осуществляется не по рельсу, а в определенном положении устройства на паре колес, расположенных перпендикулярно друг другу, и закрепленных на раме устройства через подвижную каретку с разносом высоты относительно друг друга, а вспомогательное поперечное движение осуществляется через систему рычагов, перемещающих рамку вокруг оси рамки, на которой не жестко, имея степени свободного движения в вертикальных и горизонтальных плоскостях, крепится платформа-шаблон, имеющая крепления под лазерные указатели, делители перпендикулярно расположенные, закрепленные неподвижно, и делители, свободно крепящиеся к платформе-шаблону с помощью магнитных держателей, в количестве от 1 до 10, поворот же всего устройства до полного упора в адгезив, заранее нанесенный на подготовленную поверхность пола, с уложенными в платформу-шаблон плитками, прижатыми к платформе вакуумом, осуществляется последовательно через неполный поворот вокруг оси платформы-шаблона и через нижнюю точку упора продольных колес.
| АППАРАТ-ПЛИТКОУКЛАДЧИК ЧЕРЕПАНОВЫХ | 2008 |
|
RU2374408C1 |
| Машина для укладки плиток на горизонтальную поверхность | 1977 |
|
SU781302A1 |
| Устройство для укладки плиток | 1986 |
|
SU1449650A1 |
| EP 1601847 A1, 07.12.2005. | |||

