Изобретение относится к промышленности строительства и стройматериалов, а именно к устройствам для стекольного машиностроения, и может
быть использовано на лаводах, выпускающих листовое, а также крупногабаритное стекло
Цель изобретения - повышение на дежности устройства в работе за счет кинематической связи приводов поворотной рамы и пирамиды
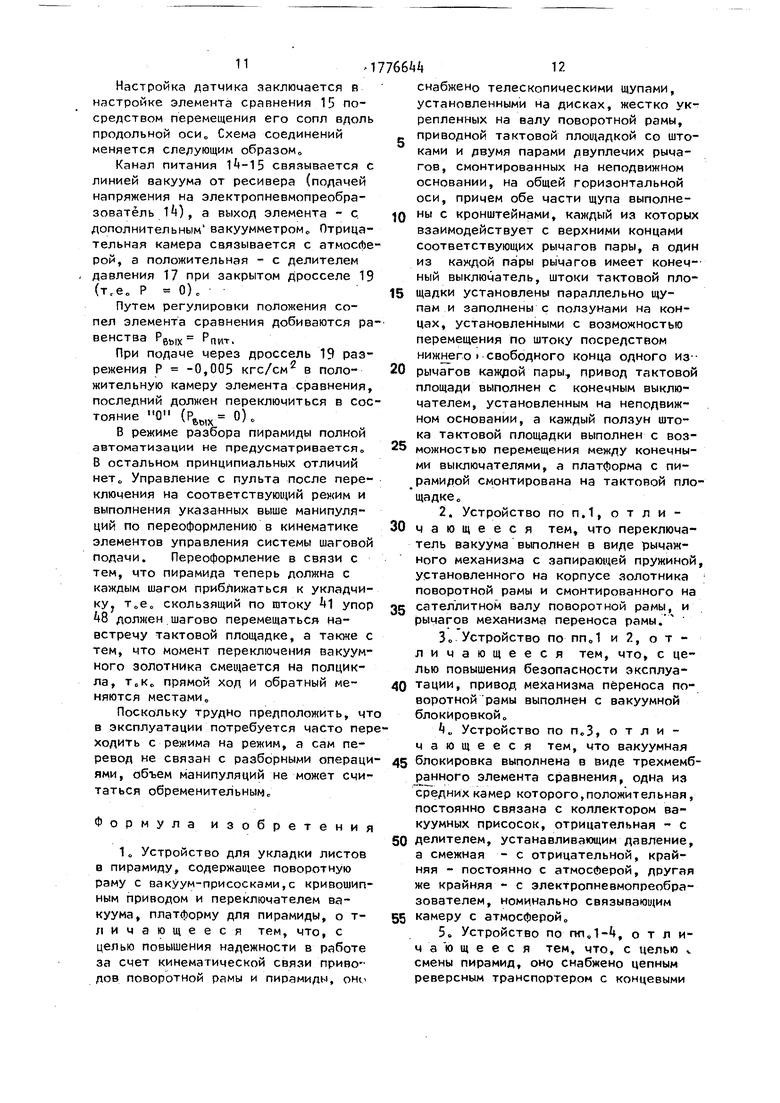
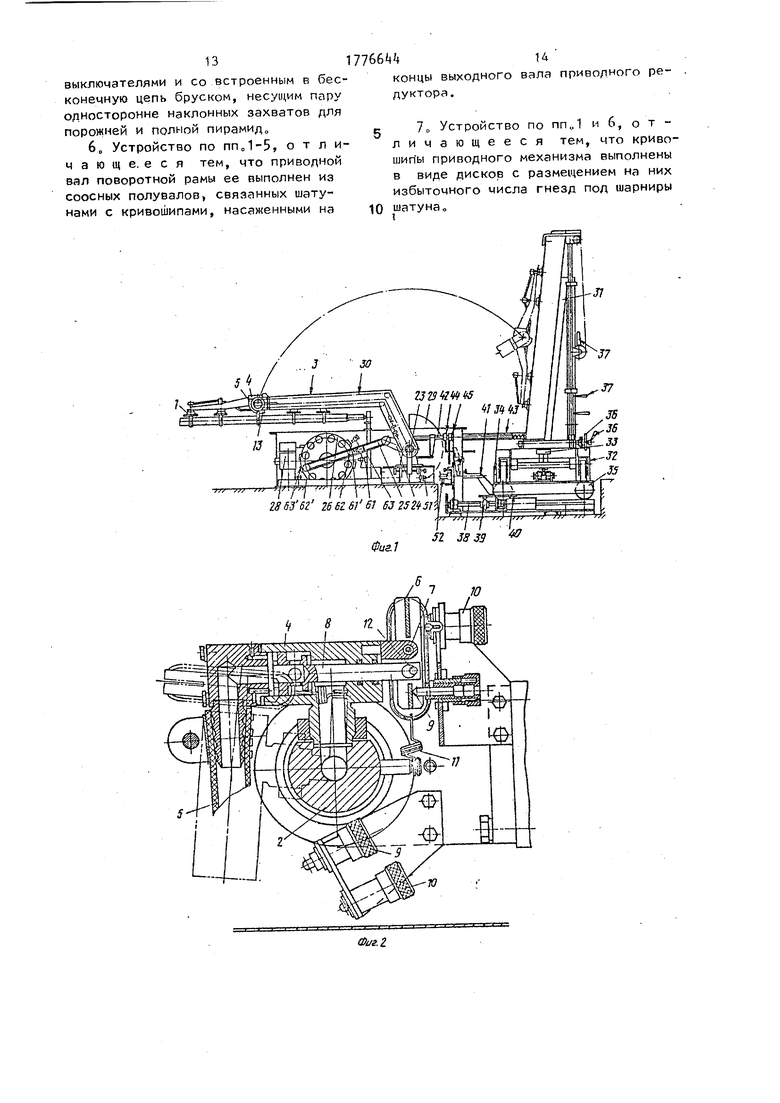
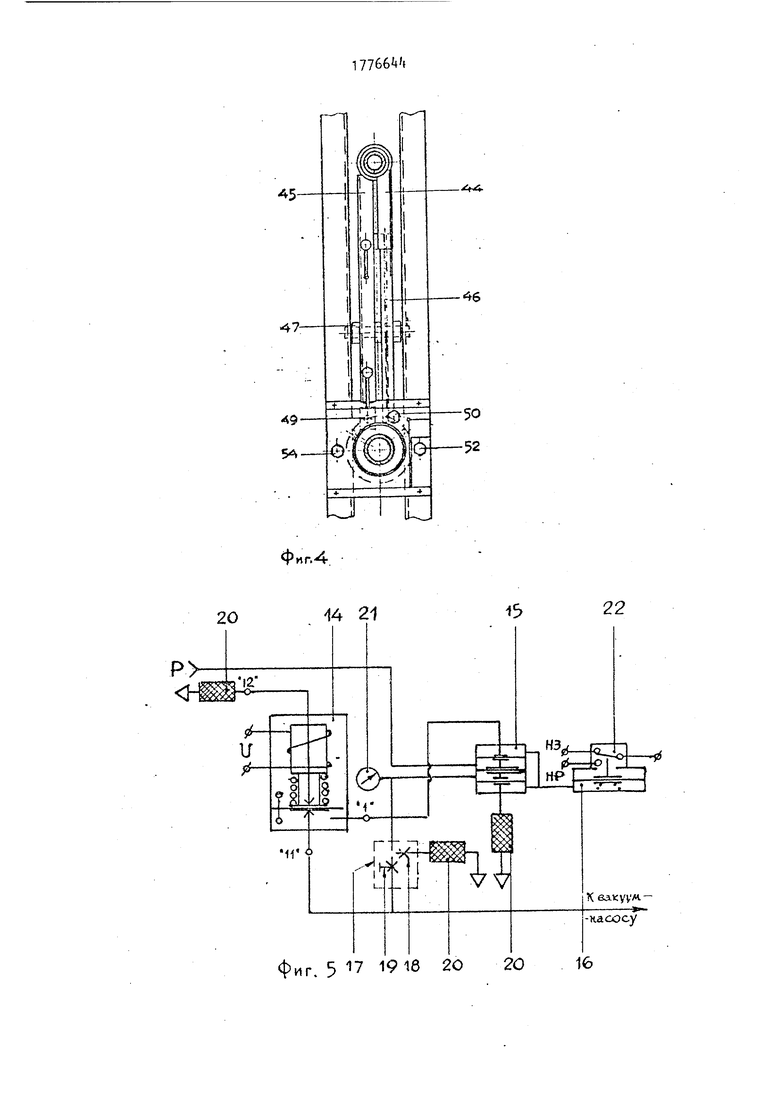
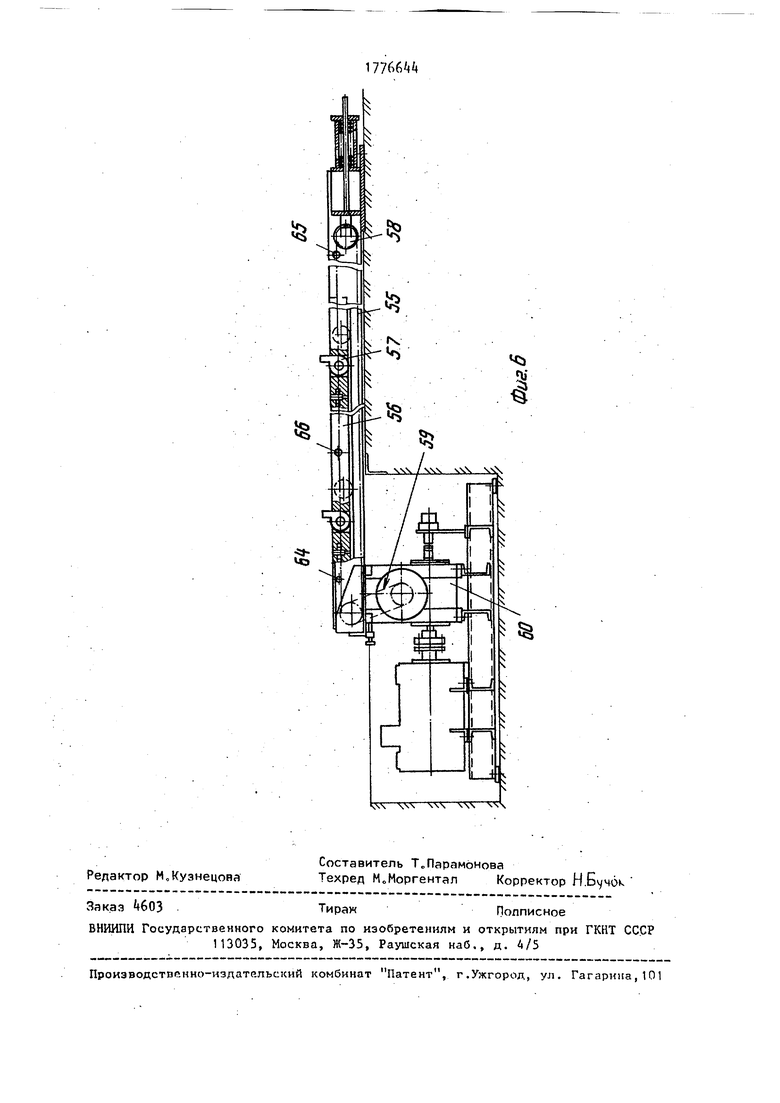
На фиг. 1 схематически изображен профильный вид укладчика, предназначенного для работы в режиме набора пирамиды со снятием листов с рольганга и в режиме разбора (пирамиды), например, с укладкой на резной стол; на фиг о 2 - золотник переключения присосов на связь с вакуумной системой или атмосферойJ на Фиг„ 3 - система настройки шаговой подачи пира- миды, профильный вид; на Лиг0 4 - система настройки шаговой подачи пирамиды, поперечный разрез на Фиг„5 схема пневмоэлектрической блокировки вакуума; на фигс6 - механизм смены пирамид, вид сбоку
Укладчик - рычажная конструкция с вакуумными захватами 1, расположенными на захватной раме„ Рама представляет собой вал-ресивер 2 (см„ фиг.,1 и 2) с поперечными кронштейнами для вакуумных присосов, опирающийся на верхние концы коромысел 3 кривошипно-шатунного привода механизма переноса присосной рамьи Вал-реси вер 2 является звеном вакуумной системы, к которому через золотниковый клапан 4 присоединен коллектор 5 ва- куумных присосов 1 о Назначение клапана 4 в переключении присосов на связь либо с вакуумной магистралью, либо с атмосферой Это переключение осуществляется механически с использованием в качестве привода относительного встречного вращения вала- ресивера 2 и несущих его коромысел Зо Механизм переключения составлен из пары подпружиненных двуплечих рычагов 6, установленных на корпусе золотникового клапана 4 с возможно- стью поворота вокруг горизонтальной оси 7 проходящей над штоком 8 в по- поперечном направлении, и двух пар регулируемых упоров 9 и 10, из которых первая пара используется при режиме работы укладчика с набором (пирамиды), а вторая - с разбором пирамиды.
Регулируемые упоры (теперь уже в
смешанных парах) установлены на опорных кронштейнах вала-ресивера 2, являющихся продолжением коромысел.
Точками подвеса пружин 11 выбраны верхние части двухплечих рычагов
6 0 5 0
5
б и корпус вала-ресивера 2, несущего золотниковый клапан, Нижние концы двуплечих рычагов 6 связаны со штоком 8 клапана 4 путем охвата собственными расширенными окнами запрессованной в шток шпильки 12„
Захватная рама несет на себе пнев- моэлектрический датчик вакуума 13 (фиг„1 и 5), являющийся средством вакуумной блокировки, предусматривающий немедленный (в пределах 100 мс) останов привода механизма переноса захватной рамы при недостаточной глубине вакуума в выбранный для контроля момент захвата листа„
Датчик построен на элементах универсальной системы промышленных; приборов и средств автоматизации (УСЭППД) и содержит электропневмо- преобразователь 14, трехмембранный элемент сравнения 15, пневмоэлектро- преобразователь 16, обеспечивающий работоспособность элемента на вакууме, дроссельный делитель давления 17 для установки заданной величины разрежения, состоящий из постоянного дросселя 18 и регулируемого дросселя 19 и трех вспомогательных фильтров 20 для местной очистки атмосферного воздуха Для измерения разрежения предусмотрен .вакуумметр 21 .
Датчик установлен в непосредственной близости к вакуумным присо- сам - на их коллекторе. Принцип построения датчика: сравнение в заданный момент времени величины разрежения в коллекторе питания вакуумных захватов с заданной предельно допустимой величиной разрежения и размыкания нормально замкнутого контакта электрического микропереключателя 22 пневмоэлектропреобразователя 16 в - случае недостаточной величины разрежения,
Механизм переноса захватной рамы кривошипно-рычажный, включает вал 23, состоящий из двух соосных полувалов, противоположные концы которых несут коромысла 3, а внутренние рычаги 24, двумя шатунами 25 связывающие вал 23 с дисковыми кривошипами 26, в свою очередь наезженными на концы выходного вала редуктора 27, связанного с двигателем 28„ Смежные концы полувалов, кроме того, несут противовесы 29,
Цель оформления кривошипов в виде дисков - в продлении срока службы редуктора за счет последовательной,
5
номере износа,замены наиболее нагружаемых зубьев последней пары колес путем перестановки шатунов 25„
Лвигатель 28 привода постоянного тока запрограммирован на работу со значительным ускорением обратного холостого) хода в пользу замедления прямого (рабочего)„
Дисковая форма кривошипов позволяет к тому же удобно расположить управляющие элементы бесконтактных торцовых переключателей с использованием четырех ручьев в двух дисках0 При этом в двух ручьях одного диска установлены два управляющих элемента двух бесконтактных переключателей, отвечающих за ускорение и замедление скорости движения в режиме, например, набора пирамиды„ Для управляющего элемента датчика, включающего средства пневмоэлектриче- ской блокировки вакуума, в этом режиме используется третий ручей с другого диска Аналогично в двух ручьях другого диска установлены управляющие элементы бесконтактных переключателей, отвечающих за скорость движения в режиме разбора пирамиды, а в качестве третьего ручья для вакуумной блокировки используется ручей с первого бездействующего диска. Подробнее - в разделе работа укладчика..
Для осуществления необходимого поворота стекла во время его переноса, вал-ресивер захватной рамы,снабженный сателлитной звездочкой, гибкой передачей 30, проложенной вдоль коромысла, планетарно связан с соос- ной главному валу солнечной звездочкой „
Пирамида 31, принимающая листы стекла от захватной рамы (см„Лиг01), установлена на транспортную тележку 32 с центральной несущей осью, допускающей разворот на месте, с продольной штангой-водилом 33, сообщающим тележке толкающее усилие, поскольку воздействует на нее сзади0 Такая связь пирамиды с буксиром обеспечивает скольжение колеса по бордюру 34, проложенному вдоль трассы пирамиды, обуславливая точность ее позиции под загрузкой на тактовой площадке 35.
Пирамида снабжена двумя парами фиксаторов пакета: нижней 3&, включающей поворотный от рукоятки флажок
776644
0
и винтовой от маховичка зажим, и верхней 37, включающей также поворотный от рукоятки флажок с изменяемым по толщине пакета Фиксируемым вылетом 0
Тактовая площадка 35 - платформа на рельсовом пути Пара колес, опирающихся на один рельс - с двойными ребордами. Вторая пара - без ребордо Платформа связана с винтовым приводом 38, смонтированным на неподвижном основании о Связь через ведущую гайку 39 ходового винта и д -водило 40 платформы0
На носовой чзсти платформы установлены два горизонтальных штока
41, относящихся в системе настройки подачи на шаг0
0 Система подачи тактовой площадки (см0Фиго 1,3,4) предусматривает шаговую подачу, соответствующую толщине листа на рольганге - при режиме набора пирамиды, или толщине ли5 ста снятого с пирамиды - при режиме разбора, а также ускоренный возврат тактовой площадки в исходное положение при смене пирамиды,,
Система включает в себя главный
0 вал 23, используемый здесь в качестве приводного для щупа, представляющего собой композицию из штока
42с подпружиненной концевой гильзой 43о Связь щупа и вала 23 ленс точная и образована так, что обеспечивает трансформацию возвратно- вращательного движения пала на противоположно направленное возвратно, поступательное щупа
0 Шток 42 несет на себе кронштейн 44, а гильза 43 - кронштейн 5 Оба кронштейна расположены против насаженных на общую ось двуплечих рычагов: № - против 46, 45 - против
g 470 Следующими элементами, входящими в комплект системы шаговой подачи тактовой площадки и замыкающими кинематическую связь являются: штоки 41 со скользящими с достаточным
Q трением упорами 48 с концевыми выклю4- чателями, из которых: 49 - установлен на нижнем плече рычага 47 (по (Ьиг„3 - справа от скользящего упора 48} , 50 - слева от упора 48, на стаg ционарном основании. Крайние положения платформы с пирамидой отмечают концевые выключатели 51 и 52 „ Надо отметить, что кронштейн 44 снабжен отводным захватом для возмож
7
ности в крайне левом положении восстанавливать исходное положение племего рычага с концевым выключателем 49.
Описанная система шаговой подачи тактовой площадки составпена для режима набора пирамиды,, Для режима разбора она несколько изменяется: двуплечий рычаг 46 ставится в нейтральное положение,, Из кронштейна 45 выдвигается вниз Фиксируемый полпун 53 и включается в действие концевой выключатель 54 „
Для смены пирамид по мере их набора или разбора, укладчик снабжен цепным реверсным транспортером (см, фиг„6)0 Он представляет собой бесконечную цепь 55 с встроенным в нее массивным бруском 56, несущим на себе два подпружиненных односторонне наклонных пальцевых захвата 57 для двух (порожней и полной) пирамид„ Обе ветви транспортной цепи постоянно натянуты через подпружиненную звездочку 580 Натяжение винтовое с возможностью многократного выбора удлинения цепи о Привод транспортера с головной стороны механизма также цепной 59 с использованием обоих концов выходного вала редуктора б00
В режиме набора пирамиды, напри- мре, укладчик работает следующим образом0
К моменту занятия листом исходного положения на рольганге захватная рама оказывается в непосредственно близости к листу и если датчики на рольганге не запрещают, рама присосными тарелками касается листа, приподнимая при этом тарелочные вакуумные клапаны Момент касания тарелок совпадает с переключением вакуумного золотника на связь с вакуумной магистралью и перекрытием связи с атмосферой„
На фиг„ 2 момент встречи двуплечего рычага б, опирающегося на ось с нижним упором пары 9, т„ес исходный момент перевода линии действия пружины 11 через мертвое положение, за которым последует смещение штока влево, прерывающее в итоге связь с атмосферой, а с вакуумной магистралью - открытую Лист захвачен„
Условимся: движение захватом рам в сторону рольганга считать обратным ходома Обратный ход осуществляется, например, с удвоенной, по сра
8
0
0
5
0
нению с прямым ходом, средней скоростью Изменение скорости обеспечивается электрической схемой: в начале прямого (замедленного) хода - по команде от концевого выключателя 61, в начале обратного (ускоренного) хода - от выключателя 61„
Присос листа осуществляется в период некоторого замедления, мгновенного останова и начального ускорения рамы. Далее, после отхода центра листа 50-100 мм от рольганга, по сигналу от концевого выключателя 639 осу- ществляется измерение глубины вакуума в коллекторе присосов , При достаточности этой глубины перемещение листа к пирамиде продолжается„ В противном случае, по команде от устройства вакуумной блокировки - пневмо- электрического датчика вакуума 13. привод механизма переноса захватной рамы отключается с одновременным включением команд и сигналов аварийной ситуации о
В конце прямого хода механизма переноса захватной рамы, в момент г встречи золотника 4 с вторым пере- / ключающим упором 9, т.е. в момент переключения золотника на связь присосных тарелок с атмосферой и перекрытием вакуума, лист отдается, тсе„ остается на пирамиде.
Одновременно с обратным ходом захватной рамы, вследствие кинема- тической связи механизмов, щупы (их два) осуществляют свой прямой ход, имея целью коснуться поверхности вновь поставленного листа с тем, чтобы:
1) с помощью кронштейна 45 через посредство) двуплечего рычага 47 поставить концевые включатели 49 в позиции, соответствующие положению (включая и возможный перекос) внешней поверхности листа в пирамиде - будущей опорной для уже захваченного рамой очередного листа„ До этого рычаг 47 своей верхней частью находился в коайнем левом положении, будучи отведенным туда отводным плечом кронштейна 44 во время обратного хода штока 42Ј
.) кронштейном 44 через посредство двуплечего рычага 46 передвинуть скользящий по штоку 41 упор 48 в левое (исходное) положение, при котором срабатывает концевой выключатель 50, включая при этом привод
5
0
0
5
тактовой площадки. Выключение при- вода осуществится одним из концевых выключателей 9 при достижении его скользящим упором 8, перемещающимся вместе с тактовой площадкой,,
Далее.во время прямого хода захватной рамы, щупы повторяют свой обратный ход, возвращая двуплечий рычаг 7 с концевым выключателем 9 в исходное положение, а тактовая площадка сдвигается на толщину листа, подготавливая тем самым место на пирамиде для очередного поднятого рамой листа
Циклы повторяются до наполнения пирамиды, о- чем свидетельствует концевой выключатель 52, который совместно с концевым выключателем 61 включают световой и звуковой сигналы и дают команду на включение привода механизма смены пирамид. При этом на шаг смещаются одновременно две пирамиды: загруженная - на старт для буксировки, порожняя - на ее место под загрузку.
Механизм смены пирамид имеет ход, жестко ограниченный концевыми выключателями: - прямой, 65 обратный. Кроме того, он снабжен промежуточным концевым выключателем 66, предназначенным для обозначения начала замедления скорости поддачи пирамид с тем, чтобы и к моменту останова привода исключить возможность нерционного перебега порожней пирамиды
По достижении ведущими упорами 57 конца прямого хода, концевые выключатели 6 останавливают привод и включают обратный ход как собственного привода, так и привода тактовой площадки„ Ускоренный возврат платформы тактовой площадки на исходную позицию прерывается концевым выключателем 51 о
Суммарное время трех последовательных операций: подачи на часть шага платформы тактовой площадки, позиционного смещения пирамид и ускоренного возврата платформы тактовой площадки в исходное (с порожней пирамидой) не превышает времени пря- мого хода захватной рамы„
Работа пневмоэлектрического датчика начинается с поступления электрического сигнала - импульса постоянного напряжения 11 2 В длительностью не менее 100 мс на катушку электромагнита электропневмопре7766М
10
,
ы
10
15
образователя (см„фмг„5)„ Входной пневматический сигнал - разрежение в коллекторе питания вакуумных зах- затов - подается в положительную камеру элемента сравнения 15с В его отрицательную камеру поступает сигнал заданной постоянной величины разрежения РЗПД , формируемой посредством делителя давления 17, состоящего из постоянного дросселя 18 и регулируемого дросселя 19 по шкале вакуумметра 21 в пределах 0 - 0,4 кгс/см2-.
В исходном состоянии датчика ка-- нал питания от электропневмопреобра- зователя 14 к элементу сравнения 15 через штуцера 1 и 12 электропнев- мопреобразователя 1 и фильтр 20 со20 общается с атмосферой., Разрежение на выходе элемента сравнения 15 при этом отсутствует (Р&ъ,х 0) и контакт микропереключателя 22 под действием пружины пневмоэлектропреобразоиателя
25 16 поддерживается в положении ИЗ (нормально замкнутое) независимо от разности разрежения ДР .
При подаче электрического импульса на катушку электромагнита элек30 тропневмопреобразователя 14, осуществляемой в заданный момент времени, канал питания 14-15 через штуцер 1 и 11 сообщается с линией вакуумного питания датчика При этом в зависимости от разности разрешения & Р на выходе элемента сравнения 15 устанавливается либо нулевое разрежение (Р6ЫХ 0)i либо разрешение, рав- , ное величине вакуума а линии питания
40 датчика (Рьых РПИГ ). При & Р О или при РЬ Pwii , т„е. когда величина разрежения Р недостаточна, Р
ftWX
- РПИТ и контакт 22 пневмоэлектро- преобразователя 16 переключается в
45 положение HP (нормально разомкнутое) При , т.е„ при Р РЗОА , давление на выходе элемента сравнения 15 равно 0 (P&bix °) и контакт 22 пневмоэлектропреобразоватеяя 16 ос50 тается в положении Н3,
Описанный датчик выполняет функцию контроля в заданный момент времени величины разрежения Р в коллекторе питания вакуумных захватов путем
55 сравнения этой величины с. заданной величиной разрежения (РМ1А) и размыкания НЗ контакта электрической цепи в случае недостаточности величины разрежения Р„
35
Настройка датчика заключается в настройке элемента сравнения 15 посредством перемещения его сопл вдоль продольной оси0 Схема соединений меняется следующим образом.
Канал питания связывается с линией вакуума от ресивера (подачей напряжения на электропневмопреобра- зоватёль , а выход элемента - с дополнительным вакуумметром Отрицательная камера связывается с атмосферой, а положительная - с делителем давления 17 при закрытом дросселе 19 (тге0 Р 0).
Путем регулировки положения сопел элемента сравнения добиваются равенства Р6Ш РПИТ.
При подаче через дроссель 19 разрежения Р -0,005 кгс/см2 в положительную камеру элемента сравнения, последний должен переключиться в сосгьых
0)
тояние О (Рь
В режиме разбора пирамиды полной автоматизации не предусматривается В остальном принципиальных отличий нето Управление с пульта после переключения на соответствующий режим и выполнения указанных выше манипуляций по переоформлению в кинематике элементов управления системы шаговой подачи. Переоформление в связи с тем, что пирамида теперь должна с каждым шагом приближаться к укладчику ,, скользящий по штоку 1 упор 48 должен шагово перемещаться навстречу тактовой площадке, а также с тем, что момент переключения вакуумного золотника смещается на полцикла, т „кс прямой ход и обратный меняются местами.
Поскольку трудно предположить, чт в эксплуатации потребуется часто перходить с режима на режим, а сам пе
ревод не связан с разборными операци- 45 блокировка выполнена в виде трехмемб- ями, объем манипуляций не может считаться обременительнымс
ранного элемента сравнения, одна из средних камер которого,положительная, постоянно связана с коллектором вакуумных присосок, отрицательная - с
Формула изобретения
1„ Устройство для укладки листов в пирамиду, содержащее поворотную раму с вакуум-присосками,с кривошипным приводом и переключателем вакуума, платформу для пирамиды, о т- личающееся тем, что, с целью повышения надежности в работе за счет кинематической связи приводов поворотной рамы и пирамиды, оно
снабжено телескопическими щупами, установленными на дисках, жестко укрепленных на валу поворотной рамы, « приводной тактовой площадкой со штоками и двумя парами двуплечих рычагов, смонтированных на неподвижном основании, на общей горизонтальной оси, причем обе части щупа выполнеQ ны с кронштейнами, каждый из которых взаимодействует с верхними концами соответствующих рычагов пары, а один из каждой пары рычагов имеет конечный выключатель, штоки тактовой пло5 щадки установлены параллельно щупам и заполнены с ползунами на концах, установленными с возможностью перемещения по штоку посредством нижнего свободного конца одного из-0 рычагов каждой пары, привод тактовой площади выполнен с конечным выключателем, установленным на неподвижном основании, а каждый ползун штока тактовой площадки выполнен с возможностью перемещения между конечными выключателями, а платформа с пирамидой смонтирована на тактовой площадке „
2. Устройство по п.1 отличающееся тем, что переключатель вакуума выполнен в виде рычажного механизма с запирающей пружиной, установленного на корпусе золотника поворотной рамы и смонтированного на
5 сателлитном валу поворотной рамы, и рычагов механизма переноса рамы.-
Зо Устройство по пп„1 и 2, о т - личающееся тем, что, с целью повышения безопасности эксплуа- 0 тации, привод механизма переноса поворотной рамы выполнен с вакуумной блокировкой,
)„ Устройство по п„3, о т л и - чающееся тем, что вакуумная
5
0
блокировка выполнена в виде трехмемб-
ранного элемента сравнения, одна из средних камер которого,положительная, постоянно связана с коллектором вакуумных присосок, отрицательная - с
делителем, устанавливающим давление, а смежная - с отрицательной, крайняя - постоянно с атмосферой, другая же крайняя - с электропневмопреобра- зователем, номинально связывающим
камеру с атмосферой.
5, Устройство по mi.l- t, о т л и- ча ющееся тем, что, с целью ,. смены пирамид, оно снабжено цепным реверсным транспортером с концевыми
28 5362 266161 61 6J2S2tSf Фиг.1
Л
37
51 3839 °

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для ионообменной обработки стеклоизделий | 1986 |
|
SU1379260A1 |
| Устройство для отделения листа от стопы и подачи его к обрабатывающей машине | 1982 |
|
SU1039614A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА«ик.;1^Л>&Юс$НАЯШ1цт~штчЕн^1^4Н&Л!/,иГЕНА | 1972 |
|
SU344714A1 |
| Укладчик листов | 1984 |
|
SU1181945A1 |
| Устройство для отделения листа от стопы и подачи его к обрабатывающей машине | 1983 |
|
SU1098625A1 |
| Линия для изготовления стекол "триплекс | 1979 |
|
SU975601A1 |
| Установка для многономенклатурной штамповки полосового материала | 1989 |
|
SU1682019A1 |
| Устройство для разборки полых цилиндрических изделий | 1990 |
|
SU1794835A1 |
| Устройство для укладки в коробки штучных предметов | 1972 |
|
SU440304A1 |
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |

Изобретение относится к промышленности строительства и стройматериалов, а именно к устройствам для стекольного машиностроения, и может быть использовано на заводах, выпускающих листовое, а также крупногабаритное стекло Цель изобретения - повышение надежности устройства в работе за счет кинематической связи приводов поворотной рамы устройства и пирамиды Работа осуществляется в автоматическом режиме набора листов стекла в пирамиду с рольганга и в режиме разбора с укладкой листов на горизонтальную плоскость при дистанционном управлении0 Съем листов происходит под прямым углом к осевой рольганга Предусмотрена возможность парной установки укладчиков, из которых один - запасной„ Смена пирамид на лозиции загрузки - автоматическая, в цикле подачи листов рольгангом Транспорт пирамид осуществляется двояким способом: либо с помощью тягача, при этом каждая пирамида снабжена собственной тележкой, либо с помощью вильчатого погрузчика, при этом пирамида съемная, а единственная тележка - составляющая комплекта тактовой площадки механизма, осуществляющего шаговую для обоих режимов работы подачу пирамиды на толщину листа0 Настройка шагового смещения осуществляется без линейных измерений, шаговая подача - без суммирования ошибок, обуславливаемых естественном рпзнотол- цинностьюперерабатываемой ленты стекла, благодаря непрерывной индикации положения наружной поверхности пакета листов в пирамиде, Укладчик укомплектован устройством пневмовакуумной блокировки, обесточивающим привод при недостаточной глубине вакуума в захватах перед началом подъема листа, разработан для листов размером 3х м с минимальной толщиной 3 мм„ Конструкция легко модифицируется как в сторону увеличения Формата до м, так и в сторону уменьшения. 6 з„п0ф-лы, 6 ил« (Л С XI х| О о 4
sD vD
rcO
u
5
&
-зvO vD I-- fЛ
Nf С
Ј
V х Л
| Информационный проспект Фирмы Grenzebach , Московская выставка Стройиндустрия-87 „ |
