Изобретение относится к вентиляторным установкам регулируемой производительности и может быть использовано в различных областях народного хозяйства, в том числе в системах транспортировки газа, в энергетических установках, в системах кондиционирования и охлаждения.
Известен способ автоматического управления группой вентиляторов, приведенный в Каталоге «Осевые вентиляторы», 2006 г., стр.294-295. При реализации этого способа посредством ведущего вентилятора управляют частотой вращения рабочих колес группы ведомых вентиляторов, причем все ведомые вентиляторы воспроизводят частоту вращения ведущего вентилятора.
Недостатком этого способа является низкая надежность, поскольку в случае выхода из строя ведущего вентилятора все ведомые вентиляторы также отключаются. При реализации данного способа невозможно эффективное энергосбережение, так как и ведущий, и все ведомые вентиляторы работают с одинаковой частотой вращения рабочих колес и одновременно, вне зависимости от того, необходима ли такая мощность в каждом конкретном рабочем моменте.
Наиболее близким по технической сущности к заявляемому изобретению является способ автоматического управления группой вентиляторов, приведенный в Каталоге фирмы ebm-papst Mulfingen GmbH & Co. KG «EC axial fans - HyBlade. Version 10/2009», стр.38. При таком способе частотой вращения ведомых вентиляторов управляют с помощью ведущего мастер-вентилятора, при этом ведущий мастер-вентилятор включает, выключает ведомые вентиляторы согласно заложенной в нем программе.
Недостатком этого способа является низкая надежность, поскольку, в связи с увеличением наработки ведущего мастер-вентилятора, повышается риск выхода его из строя и вместе с ведущим вентилятором выходит из строя и отключается вся цепочка подчиненных ему ведомых вентиляторов.
Техническая задача заявляемого технического решения - повышение надежности и достижение эффективного энергосбережения.
Технический результат достигается в способе автоматического управления частотой вращения рабочих колес вентиляторов в управляемой группе вентиляторов, при котором формируют управляемую группу вентиляторов, объединяют их одной интерфейсной линией, используют частотно-регулируемый привод, управляющий работой их электродвигателей, а также блок обработки измерительной информации и автоматического управления для регулирования частоты вращения рабочих колес вентиляторов, при этом регулирование частоты вращения рабочих колес вентиляторов и изменение количества активных ведомых вентиляторов осуществляют посредством наделения каждого из вентиляторов в сформированной управляемой группе управляющими функциями ведущего вентилятора, для этого встраивают частотно-регулируемый привод, управляющий работой электродвигателей вентиляторов, а также блок обработки измерительной информации и автоматического управления составной частью в конструкцию каждого из вентиляторов в сформированной управляемой группе. По интерфейсной линии посредством назначенного ведущего вентилятора одновременно управляют частотой вращения рабочих колес и изменяют количество активных ведомых вентиляторов, а также в алгоритм управления вводят маркер активности, при исчезновении которого переключают один из ведомых вентиляторов в режим ведущего.
Высокая степень надежности при использовании заявляемого способа подтверждается отсутствием коммутационных элементов, которые наиболее подвержены неисправностям и сбоям, поскольку содержат подвижные элементы, а также обеспечивается сохранением работоспособности и управляемости сформированной группы вентиляторов за счет передачи управляемых функций ведущего вентилятора, при выходе его из строя, одному из ведомых вентиляторов.
Эффективное энергосбережение достигается за счет регулирования частоты вращения рабочих колес ведомых вентиляторов в широких диапазонах, с одновременным включением в работу только такого количества ведомых вентиляторов, которое необходимо для поддержания заданных значений внешних параметров.
На фигуре 1 приведена структурная схема реализации способа автоматического управления частотой вращения рабочих колес вентиляторов, где:
M1÷Mn - вентиляторы;
Д - датчик внешних параметров, температуры (4-20 мА);
РТ - разветвитель токового сигнала;
БП - блок питания;
А1÷Аn+1 - автоматические выключатели;
Администратор - вспомогательный контроллер.
Для реализации заявляемого способа автоматического управления частотой вращения рабочих колес вентиляторов формируют группу, например, электронно-коммутируемых вентиляторов, в количестве, необходимом для поддержания заданных значений внешних параметров. Объединяют все вентиляторы в сформированной группе одной интерфейсной линией, устанавливают датчик внешних параметров, и через разветвитель токового сигнала подводят передающие сигналы этого датчика к каждому вентилятору в сформированной группе. В конструкцию каждого из вентиляторов в сформированной группе составной частью включают блок обработки измерительной информации и автоматического управления, а также частотно-регулируемый привод, управляющий работой электродвигателей этих вентиляторов. Далее, устанавливают два режима работы вентиляторов: режим «Мультимастер» и режим «Подчиненный». Выбирают ведущий вентилятор, например M1, подключают его в режим работы «Мультимастер». Одновременно, для остальных ведомых вентиляторов М2÷Мn интерфейсной линии подключают режим «Подчиненный». Посредством встроенного в назначенный «Мультимастер» блока обработки измерительной информации и автоматического управления на основании измерительной информации, поступающей через разветвитель сигнала от датчика, определяют необходимую частоту вращения рабочих колес и количество ведомых вентиляторов М2÷Мn, передают соответствующие управляющие электрические сигналы на частотно-регулируемые привода, управляющие работой электродвигателей ведомых вентиляторов М2÷Мn, регулируют частоту вращения их рабочих колес. В алгоритм управления вводят маркер активности, при исчезновении которого переключают один из ведомых вентиляторов в режим ведущего «Мультимастер».
В режиме «Подчиненный» встроенные в ведомые вентиляторы М2÷Мn блоки обработки измерительной информации и автоматического управления игнорируют сигналы от датчика.
Также в режиме «Мультимастер» на основании измерительной информации от датчика, при необходимости, изменяют количество работающих вентиляторов и частоту вращения их рабочих колес, отключают от интерфейсной линии или подключают к интерфейсной линии ведомые вентиляторы М2÷Мn, работающие в режиме «Подчиненный».
Штатное переключение из режима «Мультимастер» в режим «Подчиненный» и наоборот производят через определенное время для обеспечения одинаковой наработки всех вентиляторов в сформированной группе.
Аварийное переключение режимов производят в случае выхода ведущего вентилятора, работающего в режиме «Мультимастер», из строя. При этом вышедший из строя ведущий вентилятор не передает маркер активности, что вызывает передачу управления интерфейсной линией ведомому вентилятору из группы М2÷Мn, имеющему наименьшую наработку. Поскольку все вентиляторы в сформированной группе имеют одинаковые настройки и уставки, то аварийное переключение производят плавно и с небольшим увеличением частоты вращения рабочих колес, чтобы компенсировать вышедший из строя вентилятор.
При реализации заявляемого способа формируют группу, например, электронно-коммутируемых вентиляторов, в количестве, необходимом, например, для поддержания требуемой температуры охлаждаемой среды. В данном примере это n электронно-коммутируемых вентиляторов M1÷Мn (фиг.1). Устанавливают автоматические выключатели и подключают их к каждому вентилятору в сформированной группе. Блок питания подключают к разветвителю токового сигнала и к автоматическим выключателям. Подключают вспомогательный контроллер Администратор для настройки и отображения информации о работе группы вентиляторов. Подают питание через блок питания БП, определяют ведущий вентилятор и подключают его в режим «Мультимастер». Посредством ведущего вентилятора конфигурируют через интерфейсную линию остальные вентиляторы сформированной группы как ведомые с режимом работы «Подчиненный» и непосредственно регулируют частоту вращения их рабочих колес. Сигнал с датчика Д подают на вход разветвителя токового сигнала РТ, с выхода которого сигнал от датчика Д распределяют на вход блока обработки измерительной информации и автоматического управления каждого вентилятора M1÷Мn в сформированной управляемой группе. С помощью блока обработки измерительной информации ведущего вентилятора анализируют поступающий сигнал и сравнивают его с заранее введенной уставкой. По результатам сравнения через блок автоматического управления ведущего вентилятора выбирают необходимую частоту вращения рабочих колес и необходимое число активных ведомых вентиляторов, передают значение частоты вращения по интерфейсной линии. Для реализации аварийного управления посредством ведущего вентилятора дополнительно передают по интерфейсной линии контрольную информацию о состоянии управляемой группы в целом.
По окончании единичного обмена, по интерфейсной линии передают маркер активности ведущего вентилятора.
Ведомому вентилятору передают функцию ведущего в двух случаях.
В первом случае, при штатном переключении, то есть через определенное время, при достижении заданного значения наработки ведущего вентилятора. По интерфейсной линии прекращают подачу маркера активности и, один из ведомых, вентилятор, имеющий наименьшее время наработки, наделяют функциями ведущего, переключают его в режим «Мультимастер».
Во втором случае, при аварийном переключении, в случае выхода из строя ведущего вентилятора. Неполучение маркера активности через определенное время, вызывает процедуру смены ведущего и процедуру переключения режимов с «Подчиненный» на «Мультимастер» у вентилятора с наименьшим временем наработки в управляемой группе.
Таким образом, передавая управляемые функции ведущего вентилятора, при выходе его из строя, одному из ведомых вентиляторов, обеспечивают сохранение работоспособности и управляемости сформированной группы вентиляторов, при этом одновременно регулируя в широких диапазонах частоту вращения рабочих колес вентиляторов и количество ведомых вентиляторов, включая в рабочий процесс только необходимое количество ведомых вентиляторов для поддержания заданных значений внешних параметров, повышают надежность и достигают эффективного энергосбережения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ГУСЕНИЧНОЕ ШАССИ | 2013 |
|
RU2541590C1 |
| Способ передачи данных по шине, система связи для осуществления данного способа и устройство автоматической защиты для предотвращения аварийной ситуации на объекте управления | 2018 |
|
RU2705421C1 |
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТАМИ ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2012 |
|
RU2532536C2 |
| АВТОМОБИЛЬ | 1998 |
|
RU2202480C2 |
| Устройство для сопряжения микропроцессора с системной шиной | 1990 |
|
SU1837299A1 |
| АРБИТР ИНТЕРФЕЙСА RS-485 | 2014 |
|
RU2546574C1 |
| Система зарядки и способ управления зарядкой батареи электротранспортного средства | 2021 |
|
RU2797370C1 |
| СИСТЕМА РАСПРЕДЕЛЕННЫХ БАЗОВЫХ СТАНЦИЙ, СПОСОБ ОРГАНИЗАЦИИ СЕТИ, СОДЕРЖАЩИЙ ТАКУЮ СИСТЕМУ, И БЛОК БАЗОВОГО ДИАПАЗОНА | 2006 |
|
RU2364057C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ИНИЦИАЛИЗАЦИИ И АВТОРИЗАЦИИ УСТРОЙСТВ, ОБЪЕДИНЕННЫХ В ОДНОЙ СИСТЕМЕ | 2022 |
|
RU2802535C1 |
| СТАЦИОНАРНЫЙ ЭРГОМЕТРИЧЕСКИЙ ТРЕНАЖЕР | 2017 |
|
RU2729088C1 |
Изобретение относится к вентиляторным установкам регулируемой производительности. При реализации способа автоматического управления частотой вращения рабочих колес вентиляторов в управляемой группе вентиляторов формируют управляемую группу вентиляторов, объединяют их одной интефейсной линией. При этом регулирование частоты вращения рабочих колес вентиляторов и изменение количества активных ведомых вентиляторов осуществляют посредством наделения каждого из вентиляторов в сформированной управляемой группе управляющими функциями ведущего вентилятора. Для этого встраивают частотно-регулируемый привод, управляющий работой электродвигателей вентиляторов, а также блок обработки измерительной информации и автоматического управления составной частью в конструкцию каждого из вентиляторов в сформированной управляемой группе. По интерфейсной линии посредством назначенного ведущего вентилятора одновременно управляют частотой вращения рабочих колес и изменяют количество активных ведомых вентиляторов. Также в алгоритм управления вводят маркер активности, при исчезновении которого переключают один из ведомых вентиляторов в режим ведущего. Технический результат: повышение надежности и достижение эффективного энергосбережения. 1 ил.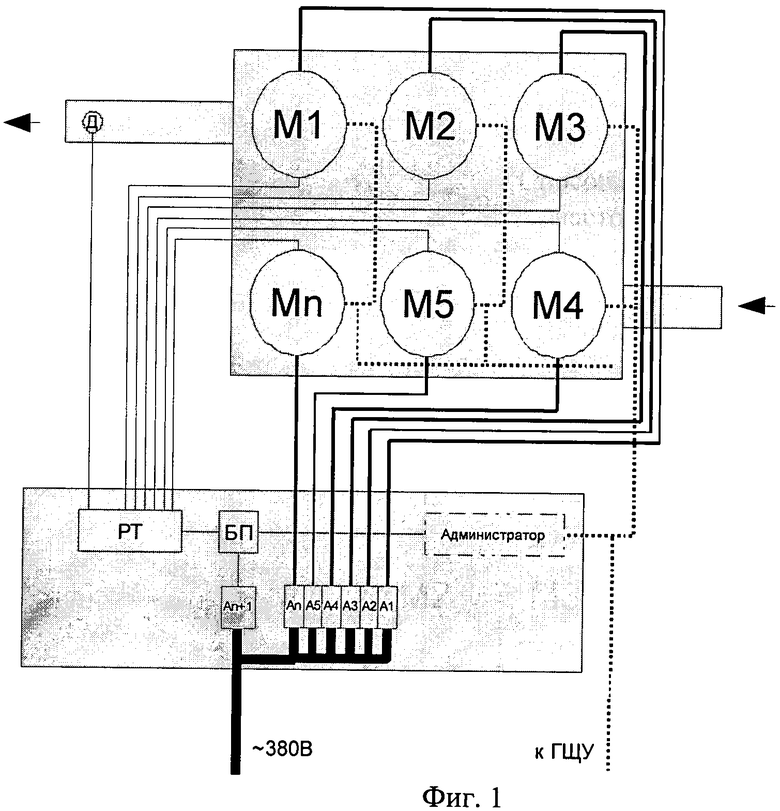
Способ автоматического управления частотой вращения рабочих колес вентиляторов в управляемой группе вентиляторов, при котором формируют управляемую группу вентиляторов, объединяют их одной интерфейсной линией, используют частотно-регулируемый привод, управляющий работой их электродвигателей, а также блок обработки измерительной информации и автоматического управления для регулирования частоты вращения рабочих колес вентиляторов, отличающийся тем, что регулирование частоты вращения рабочих колес вентиляторов и изменение количества активных ведомых вентиляторов осуществляют посредством наделения каждого из вентиляторов в сформированной управляемой группе управляющими функциями ведущего вентилятора, для этого встраивают частотно-регулируемый привод, управляющий работой электродвигателей вентиляторов, а также блок обработки измерительной информации и автоматического управления составной частью в конструкцию каждого из вентиляторов в сформированной управляемой группе, при этом по интерфейсной линии посредством назначенного ведущего вентилятора одновременно управляют частотой вращения рабочих колес и изменяют количество активных ведомых вентиляторов, а также в алгоритм управления вводят маркер активности, при исчезновении которого переключают один из ведомых вентиляторов в режим ведущего.
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ВЕНТИЛЯТОРА | 0 |
|
SU166085A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ УГЛОВ УСТАНОВКИ РАБОЧИХ ЛОПАТОК ВЕНТИЛЯТОРА ТУРБОДВИГАТЕЛЯ И СПОСОБ РЕГУЛИРОВАНИЯ ВЕНТИЛЯТОРА ТУРБОДВИГАТЕЛЯ | 1994 |
|
RU2107194C1 |
| CN 102011742 A, 13.04.2011 | |||
| CN 101761500 A, 30.03.2010. | |||

