Изобретение относится к авиационным системам, использующим дистанционно пилотируемые летательные аппараты (ДПЛА) для применения в таких целях, как оперативно-тактическая разведка, воздушное картографирование, мониторинг нефте- и газопроводов, линий электропередач и т.д.
Известна система наблюдения за наземной обстановкой, содержащая беспилотный летательный аппарат (БЛА), на котором установлен комплекс наблюдения и слежения, включающий в себя приемник команд, камеры наблюдения и слежения, передатчик изображений, микропроцессор, высотомер, бесплатформенный инерциальный блок, аналого-цифровой преобразователь, бортовое форматирующее устройство, блок сжатия данных, два блока памяти, корреляционное устройство, блок рулевых машинок и исполнительные устройства, а также мобильный наземный комплекс наблюдения и управления, содержащий приемник изображений, мобильный персональный компьютер, передатчик команд, формирователь кадра [1].
Известен портативный комплекс авианаблюдений, содержащий дистанционно пилотируемый летательный аппарат с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображения, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом. Радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены корректируемыми по глобальной навигационной системе инерциальными блоками с микромеханическими вибрационными гироскопами - акселерометрами, а сам дистанционно пилотируемый летательный аппарат выполнен в виде автономно пилотируемого летательного микроаппарата и размещен вместе с мобильным комплексом управления и обработки информации в общем портативном контейнере. Автономно пилотируемый летательный микроаппарат для портативного комплекса авианаблюдений содержит фюзеляж, на котором размещены винтовой движитель, рулевое управление по курсу и тангажу, видеокамера с передатчиком видеоизображения, радиоуправляемая бортовая система обеспечения полета летательного аппарата и бортовая приемопередающая аппаратура. В корпусе отсека установлены видеокамера с передатчиком видеоизображения, рулевые машинки, аккумуляторная батарея, приборы радиоуправляемой бортовой системы обеспечения полета летательного аппарата и бортовой приемопередающей аппаратуры [2].
Однако радиус действия данных систем весьма ограничен, а способ ориентации и стабилизации БЛА в пространстве не применим для наблюдения за наземной обстановкой большой протяженности.
Известен ДПЛА модели "ГрАНТ" для телевизионного наблюдения за местностью и целей на ней, содержащий бортовое оборудование управления, бортовое радиоэлектронное оборудование, бортовую ЭВМ, пункт управления, глобальную навигационную спутниковую систему, комплекс радиоантенн, транспортно-пусковую установку [3].
Однако данный комплекс имеет значительные габариты и вес, громоздкую пусковую установку.
Известен комплекс ДПЛА "Нетопырь 3", содержащий пусковую установку на автомобиле, несущую конструкцию, силовую установку, полезную нагрузку - видеокамеру, инфракрасную систему, навигационную спутниковую систему [4].
Известен ДПЛА модели "Tasuma CSV-20", содержащий несущую конструкцию, полезную нагрузку - цветную телевизионную камеру, передатчик команд управления, передатчик видеосигнала, приемную аппаратуру, пуско-траспортировочную установку, силовую установку [5].
Недостатком вышеупомянутых технических решений является низкая степень интеграции комплекса с другими системами летательного аппарата; возможность определения пространственной ориентации объекта только с помощью инерциальных датчиков, что делает затруднительным ручное управление летательным аппаратом, уменьшает мобильность и надежность его управления.
Наиболее близким к заявляемому техническому решению является "Автоматический беспилотный диагностический комплекс" (см. патент РФ №2256894, G01M 3/00), который и выбран в качестве прототипа [6].
Комплекс содержит систему автоматического управления, спутники глобальной навигационной системы, навигационную систему, инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, вычислитель действительных координат спутниковой навигационной системы, радиомаяк, систему воздушно-скоростных сигналов, малогабаритный радиовысотомер малых высот, систему автоматического дистанционного управления, систему команд радиоуправления, информационно-логический блок, приемную аппаратуру командного радиоуправления, обзорную телевизионную систему, систему радиотелеметрии, систему автоконтроля работы бортовых систем с вычислителем, систему управления двигателем, вычислитель системы автоматического управления, радиотранслятор, блок управления бортовыми системами, бортовой накопитель информации, систему посадки и выпуска парашюта, систему диагностики состояния магистральных трубопроводов и блок управления ею, радиовысотомер, наземные пункты управления, стартовую катапульту и систему спасения. Радиотелеметрическая система содержит две радиостанции, размещенные соответственно на дистанционно-пилотируемом летательном аппарате и наземном пункте управления, каждая из которых содержит генератор высокой частоты, фазовый манипулятор, источник дискретных сообщений и команд, первый смеситель, первый гетеродин, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, приемопередающую антенну, второй усилитель мощности, второй смеситель, второй гетеродин, усилитель второй промежуточной частоты, перемножитель, полосовой фильтр и фазовый детектор.
Однако назначением этого комплекса является только поиск и обнаружение утечек в газопроводе. Комплекс должным образом не обеспечивает надежный, помехоустойчивый, скрытный обмен радиотелеметрической и командной информацией между дистанционно-пилотируемым летательным аппаратом и наземным пунктом управления, а также безопасное управление летательным аппаратом в ручном дистанционном режиме вне зоны его видимости.
В основу изобретения положена задача создания системы зондирования земной поверхности, позволяющей обеспечить помехоустойчивый, скрытный, надежный обмен радиотелеметрической и командной информации между дистанционно-пилотируемым летательным аппаратом и наземным пунктом управления, а также безопасное управление летательным аппаратом в ручном дистанционном режиме вне зоны его видимости.
Поставленная задача решается тем, что в авиационной системе зондирования земной поверхности, включающей дистанционно-пилотируемый летательный аппарат с планером, силовой установкой с поршневым двигателем, бортовым комплексом управления дистанционно-пилотируемым летательным аппаратом, содержащим инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, вычислитель действительных координат спутниковой навигационной системы, систему воздушно-скоростных сигналов, высотомер, систему командного радиоуправления и обзорную телевизионную систему, систему автоконтроля работы бортовых систем, систему обеспечения посадки с устройством торможения основных колес шасси, систему управления двигателем и бортовой накопитель информации, а также мобильный наземный пункт управления, содержащий телевизионную систему, пульт дистанционного управления, и радиотелеметрическую систему, содержащую две радиостанции, размещенные одна - на наземном пункте управления, а другая - на дистанционно пилотируемом летательном аппарате, согласно изобретению бортовой комплекс управления дистанционно-пилотируемым летательным аппаратом дополнительно содержит блок сопряжения с видеокамерой, своим входом соединенный с обзорной телевизионной системой, а выходом - с бортовым накопителем информации, блок сопряжения навигационных систем, одним из своих входов соединенный с выходом приемной аппаратуры спутниковой навигационной системы, другим - с выходом инерциальной навигационной системы, а выход блока сопряжения навигационных систем соединен с вычислителем действительных координат спутниковой навигационной системы, который выполнен с возможностью определения углов крена, тангажа и курса дистанционно-пилотируемого летательного аппарата, на планере в одной плоскости размещены три малогабаритные антенны, подключенные к приемной аппаратуре спутниковой навигационной системы, при этом они разнесены в пространстве относительно друг друга на 120°, мобильный наземный пункт управления дополнительно содержит мобильный персональный компьютер, включающий систему ввода поворотных пунктов маршрута, пульт дистанционного управления, выполненный с возможностью управления пространственным положением ДПЛА, систему обработки и отображения радиотелеметрии, выполненную с возможностью вывода цифровой и графической информации на экран мобильного персонального компьютера, каждая радиостанция содержит приемник, включающий входной полосовой фильтр, своим входом соединенный с приемопередающей антенной, а выходом - с защитным устройством, которое через полосовой фильтр соединено с малошумящим усилителем, в свою очередь, малошумящий усилитель соединен с двумя перемножителями, каждый из которых соответственно соединен с арифметико-логическим устройством через последовательно соединенные первый фильтр нижних частот, усилитель нижних частот и второй фильтр нижних частот, при этом каждый из перемножителей другим своим входом соединен с генератором псевдослучайной последовательности, и передатчик, включающий источник данных, соединенный с возбудителем, который содержит последовательно соединенные формирователь видов работ (модулятор), преобразователь частот, полосовой пропускающий фильтр, при этом формирователь видов работ (модулятор) двумя входами соединен с датчиком опорных частот, который входом подключен к задающему генератору, а другим выходом к датчику сетки частот, чей выход является вторым входом преобразователя частот, причем полосовой пропускающий фильтр возбудителя подключен к последовательно соединенным усилителю мощности из n каскадов и выходной цепи, при этом приемник и передатчик выполнены с возможностью использования шумоподобных сигналов, для передачи данных - с функцией Уолша, а для поиска сигнала и его синхронизации - с М-последовательностью.
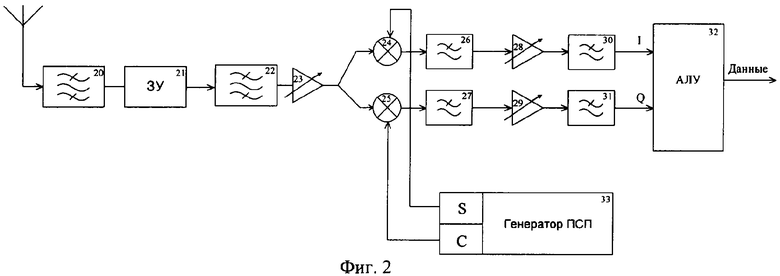
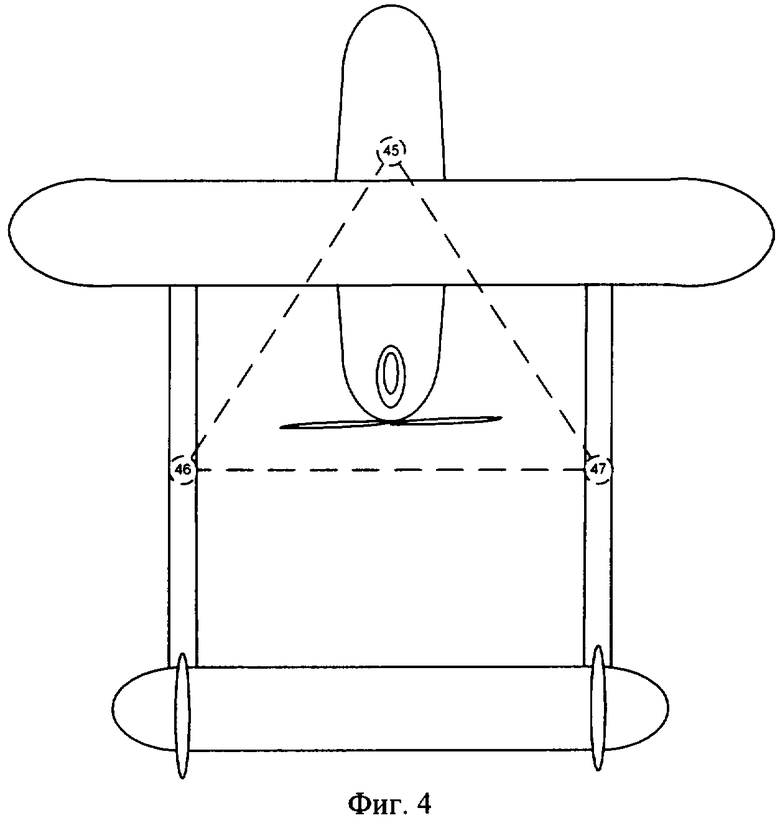
На фиг.1 представлена обобщенная структурная схема авиационной системы зондирования земной поверхности, на фиг.2 - структурная схема приемника радиотелеметрической системы, на фиг.3 - обобщенная структурная схема передатчика радиотелеметрической системы, на фиг.4 - вариант размещения антенн на ДПЛА.
На представленных фигурах использованы следующие обозначения: 1 - бортовой комплекс управления ДПЛА; 2 - приемник команд управления; 3 - система командного радиоуправления; 4 - созвездие спутников глобальной навигационной системы "ГЛОНАСС" и "GPS"; 5 - приемная аппаратура спутниковой навигационной системы; 6 - инерциальная навигационная система; 7 - блок сопряжения с видеокамерой; 8 - блок автопилота и управления бортовыми системами; 9 - блок исполнительных устройств и механизмов; 10 - бортовой накопитель информации; 11 - система ввода поворотных пунктов маршрута; 12 - мобильный персональный компьютер; 13 - радиотелеметрическая система; 14 - обзорная телевизионная система; 15 - система обеспечения посадки; 16 - система обработки и отображения радиотелеметрии; 17 - система управления двигателем; 18 - пульт дистанционного управления; 19 - мобильный наземный пункт управления и слежения; 20, 22 - входной полосовой фильтр; 21 - защитное устройство; 23 - малошумящий усилитель (МШУ); 24, 25 - перемножитель; 26, 27, 30, 31 - фильтры нижних частот (ФНЧ); 28, 29 - усилители нижних частот; 32 - арифметико-логическое устройство (АЛУ); 33 - генератор псевдослучайной последовательности (ПСП); 34 - источник данных (ИД); 35 - формирователь видов работ (модулятор, ФВР); 36 - преобразователь частот; 37 - полосовой пропускающий фильтр (ППФ); 38 - датчик опорных частот; 39 - датчик сетки частот (ДСЧ); 40 - задающий генератор (ЗГ); 41 - синтезатор частот; 42 - усилитель мощности из n каскадов; 43 - выходная цепь (ВЦ); 44 - возбудитель; 45, 46, 47 - малогабаритная антенна спутниковой навигационной системы; 48 - блок сопряжения навигационных систем; 49 - система воздушно-скоростных сигналов; 50 - высотомер; 51 - система автоконтроля работы бортовых систем; 52 - вычислитель действительных координат спутниковой навигационной системы.
Представленная авиационная система зондирования земной поверхности содержит (фиг.1) созвездие спутников навигационной системы 4, бортовой комплекс 1 управления ДПЛА, включающий в себя приемную аппаратуру 5 спутниковой навигационной системы и инерциальную навигационную систему 6, подключенные выходом к блоку 48 сопряжения навигационных систем, блок 8 автопилота и управления бортовыми системами. При этом со входами блока 8 автопилота и управления бортовыми системами соединены выходы, соответственно, приемника 2 команд управления, вычислителя 52 действительных координат спутниковой навигационной системы, системы 3 командного радиоуправления, системы 49 воздушно-скоростных сигналов, высотомера 50, системы автоконтроля 51 работы бортовых систем, бортового накопителя информации 10, а выходы блока автопилота и управления бортовыми системами 8 соединены с входами, соответственно, бортового накопителя информации 10, обзорной телевизионной системы 14, соединенной выходом с блоком 7 сопряжения с видеокамерой, блока 9 исполнительных устройств и механизмов, системы 15 обеспечения посадки, системы 3 командного радиоуправления, радиотелеметрической системы 13. В состав авиационной системы зондирования земной поверхности входят также мобильный наземный пункт 19 управления и слежения, который содержит радиотелеметрическую систему 13, соединенную своим входом с мобильным персональным компьютером 12, содержащий систему 11 ввода поворотных пунктов маршрута, систему 16 обработки и отображения радиотелеметрии, обзорную телевизионную систему 14, пульт 18 дистанционного управления, выполненный с возможностью контроля пространственной ориентации ДПЛА.
Приемник радиотелеметрической системы (фиг.2) включает входной полосовой фильтр 20, своим входом соединенный с приемопередающей антенной, а выходом - с защитным устройством 21, которое через полосовой фильтр 22 соединено с малошумящим усилителем (МШУ) 23, в свою очередь, малошумящий усилитель соединен с двумя перемножителями 24 (25), каждый из которых соединен с арифметико-логическим устройством 32 через последовательно соединенные первый фильтр нижних частот 26 (27), усилитель нижних частот 28 (29) и второй фильтр нижних частот 30 (31) соответственно, при этом каждый из перемножителей другим своим входом соединен с генератором псевдослучайной последовательности (ПСП) 33.
Передатчик команд управления (фиг.3) содержит источник данных 34, соединенный с возбудителем 44, который содержит последовательно соединенные формирователь видов работ (модулятор) 35, преобразователь частот 36, полосовой пропускающий фильтр 37, при этом формирователь видов работ (модулятор) 35 двумя входами соединен с датчиком опорных частот 38, который входом подключен к задающему генератору 40, а другим выходом к датчику сетки частот 39, чей выход является вторым входом преобразователя частот 36, причем полосовой фильтр возбудителя подключен к последовательно соединенным усилителю мощности из n каскадов 42 и выходной цепи 43, после прохождения которой сигнал поступает в приемопередающую антенну, причем приемник и передатчик команд управления выполнены с возможностью использования шумоподобных сигналов, для передачи данных - с функцией Уолша, а для поиска сигнала и его синхронизации - с М-последовательностью.
На фиг.4 представлен вариант размещения на ДПЛА малогабаритных антенн 45, 46, 47 спутниковой навигационной системы. Фюзеляж планера выполнен из легких композиционных материалов, при этом конструкция планера просто разбирается и собирается, что делает его легко транспортируемым.
Передатчик команд управления (фиг.3) работает следующим образом.
Бинарная последовательность, представляющая собой промодулированную ПСП в соответствии с передаваемыми данными, с источника данных 34 поступает на формирователь 35 видов работ, где под его воздействием происходит модулирование фазы автогенератора по закону бинарной последовательности. Модулирование фазы автогенератора происходит через систему автоподстройки частоты (АПЧ) автогенератора. Блоки 38, 39, 40 образуют синтезатор частот (СЧ) 41. СЧ 41 генерирует две частоты: одна предназначена для системы АПЧ модулятора - f01, другая служит для обеспечения перестройки несущей частоты передатчика в пределах рабочего диапазона - fсчн÷fсчв. Частота f01 поступает в систему АПЧ через фазовращатель, на который поступает бинарная последовательность от источника данных 34. В системе АПЧ происходит сравнение образцовой частоты f01 с частотой генератора, управляемого напряжением (ГУН), и в случае несоответствия частот вырабатывается сигнал ошибки, который стремится устранить разницу между частотами. Таким образом происходит стабилизация частоты ГУН и одновременно манипуляция по фазе, что необходимо для правильной и надежной работы передатчика в частотном диапазоне. Промоделированный сигнал fсрм поступает на преобразователь частот 36, где с помощью сигнала с СЧ 41 fсчн fсчв переносится в рабочий диапазон передатчика. Для выделения полезного сигнала используется ППФ 37. Далее полезный сигнал усиливается до требуемой мощности усилителем 42, состоящим из двух каскадов, и поступает на ВЦ 43, где происходит фильтрация внеполосного излучения. После прохождения сигналом ВЦ 43 он поступает в приемопередающую антенну и излучается в пространство.
В радиоканале телеуправления применяется шумоподобный сигнал (ШПС), что обеспечивает наибольшую помехоустойчивость комплекса, а также скрытую передачу данных с высокой точностью, при этом в качестве ПСП для передачи данных выбрана функция Уолша как более устойчивая к влиянию помех, а для поиска сигнала и его синхронизации используется М-последовательность как имеющая более низкий уровень боковых лепестков [7]. ШПС имеет два полезных эффекта:
Эффект первый - рассредоточение энергии сигнала в пределах очень большой полосы частот, что соответственно снижает плотность мощности в любой точке спектра. Уровень рассредоточенного сигнала зависит от нескольких факторов, таких как передаваемая мощность, расстояние от передатчика, усиление антенн и ширины спектра. Рассредоточение энергии позволяет опустить сигнал ниже уровня шума, сигнал при этом становится фактически невидимым. Стандартный узкополосный приемник не может распознать за шумами ШПС, в то время как ШПС может быть принят приемником с соответствующей ПСП без всяких затруднений. Обмен информацией возможен только в случае, если известна ПСП.
Второй эффект ШПС - это возможность выделить полезный сигнал при действии как узкополосных, так и широкополосных помех. Приемник имеет копию ПСП и использует ее для восстановления сигнала. Узкополосная помеха подавляется в процессе обработки. Эффективность по отношению к помехам привела к использованию ШПС в современных средствах связи. Попадающий в пределы полосы широкополосного приемника стандартный узкополосный сигнал с амплитудной модуляцией (как и ШПС), не несущий требуемой ПСП, будет отфильтрован.
Во время полета ДПЛА на наземный пункт управления и слежения передается изображение местности с обзорной телевизионной системы 14, текущие координаты полета, пространственное положение ДПЛА, информация о состоянии бортовых систем. Оператор следит за наземной обстановкой на экране персонального компьютера 12. Посредством радиотелеметрической системы 13, системы 16 обработки и отображения телеметрии и пульта 18 дистанционного управления оператор с наземного пункта может не только корректировать полет ДПЛА, но и управлять его пространственным положением, при необходимости вне зоны его прямой видимости, ориентируясь по системе 16 обработки и отображения радиотелеметрии, которая представляет собой понятную и удобную систему вывода цифровой и графической информации на экран мобильного персонального компьютера 12.
Повышенная точность определения пространственной ориентации ДПЛА осуществляется за счет применения сопряженных инерциальной и спутниковой навигационных систем, а также за счет применения трех малогабаритных антенн 45, 46, 47 спутниковой навигационной системы, разнесенных в пространстве относительно друг друга на 120° и расположенных в одной плоскости на фюзеляже и несущих поверхностях планера.
В частности, известны и используются в данной системе методы и алгоритмы определения пространственной ориентации объектов по сигналам спутниковых радионавигационных систем с использованием интерферометрического метода, основанного на измерении разности фаз сигналов от спутников между пространственно разнесенными антеннами [8, 9, 10].
При этом, используя показания акселерометров (например, фирмы Analog Devices, www.analog.com), установленных в инерциальной навигационной системе, можно значительно упростить алгоритмы определения пространственной ориентации, уменьшить требование к количеству принимаемых спутников, свести к нулю вероятность неверного определения пространственной ориентации ДПЛА. Для достижения данной цели используется блок сопряжения навигационных систем 48.
Мобильный персональный компьютер 12 представляет собой компьютер типа «Ноутбук», при этом обзорная телевизионная система 14, система 16 обработки и отображения радиотелеметрии, а также система 11 ввода поворотных пунктов маршрута конструктивно располагаются внутри корпуса этого компьютера.
Таким образом, предлагаемая авиационная система зондирования земной поверхности по сравнению с прототипом обеспечивает помехоустойчивый, скрытный канал радиоуправления ДПЛА, определение пространственной (углов крена, тангажа, курса) ориентации объекта по сигналам спутниковых навигационных систем ГЛОНАСС\GPS для управления в ручном режиме вне зоны видимости. Это достигается соответственно выполнением радиоканала телеуправления с применением ШПС, выполнением системы пространственной ориентации и определения текущих координат объекта при помощи сопряженных инерциальной 6 и спутниковой 5 навигационных систем. При этом сигналы спутниковой навигационной системы 5 принимаются на расположенные в одной плоскости три малогабаритные антенны 45, 46, 47 спутниковой навигационной системы, разнесенные в пространстве относительно друг друга на 120°, а для удобства управления оператор ориентируется по системе обработки и отображения радиотелеметрии 16, которая представляет собой понятную и удобную систему вывода цифровой и графической информации на экран персонального компьютера.
Кроме того, данная система обеспечивает большую компактность за счет применения схемотехнических решений с большой степенью интеграции, замены телевизионной системы малогабаритным оптоэлектронным преобразователем с передачей цифровой информации на пункт управления в реальном времени.
Источники информации
1. Патент РФ №2248307. Система наблюдения за наземной обстановкой. МПК В64С 29/00, G08C 21/00, 2004.
2. Патент РФ №2232104. Портативный комплекс авианаблюдений и автономно пилотируемый летательный микроаппарат для него. МПК В64С 29/02, G01V 9/00, 2003.
3. ДПЛА "ГрАНТ". www.dpla.rn.
4. ДПЛА "Нетопырь 3". Авиа.ру. www.avia.ru.
5. ДПЛА "Tasuma CSV-20". http://dpla.info.
6. Патент РФ №2256894. Автоматический беспилотный диагностический комплекс. МПК G01M 3/00, 2003.
7. Дистанционное пропорциональное управление при наличии помех: Сб. науч. тр. / ред.: А.И.Громыко, А.В.Сарафанов. М.: Радио и связь, 2006 г., 629 с.
8. Фатеев Ю.Л. Теоретические основы и практическая реализация угловых измерений на основе глобальных навигационных спутниковых систем: Дисс. на соискание ученой степени докт. техн. наук.
9. Степанов О.А. Исследование методов решения задачи ориентации с использованием спутниковых систем / О.А.Степанов, Д.А.Кошаев // Гироскопия и навигация. - 1999. - №2. с.30-54.
10. Фатеев Ю.Л. Определение угловой ориентации на основе глобальных навигационных спутниковых систем. // Радиотехника, №7, 2002, - с.51-57.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2424539C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2362981C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2714845C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2012 |
|
RU2503038C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |

Изобретение относится к авиационным системам, использующим дистанционно пилотируемые летательные аппараты (ДПЛА) для применения в таких целях, как оперативно-тактическая разведка, воздушное картографирование, мониторинг нефтепроводов и газопроводов, линий электропередач. Авиационная система зондирования земли включает в себя радиоканал телеуправления с применением шумоподобных сигналов, выполнение системы пространственной ориентации и определения текущих координат объекта при помощи сопряженных инерциальной и спутниковой навигационных систем. При этом сигналы спутниковой навигационной системы принимаются на расположенные в одной плоскости три малогабаритные антенны спутниковой навигационной системы, разнесенные в пространстве относительно друг друга на 120°, а для удобства управления оператор ориентируется по системе обработки и отображения радиотелеметрии, которая представляет собой понятную и удобную систему вывода цифровой и графической информации на экран персонального компьютера. Технический результат - обеспечение помехоустойчивого, скрытного канала радиоуправления ДПЛА, определение пространственной ориентации (углов крена, тангажа, курса) объекта по сигналам спутниковых навигационных систем ГЛОНАСС\GPS для управления в ручном режиме вне зоны видимости. 4 ил.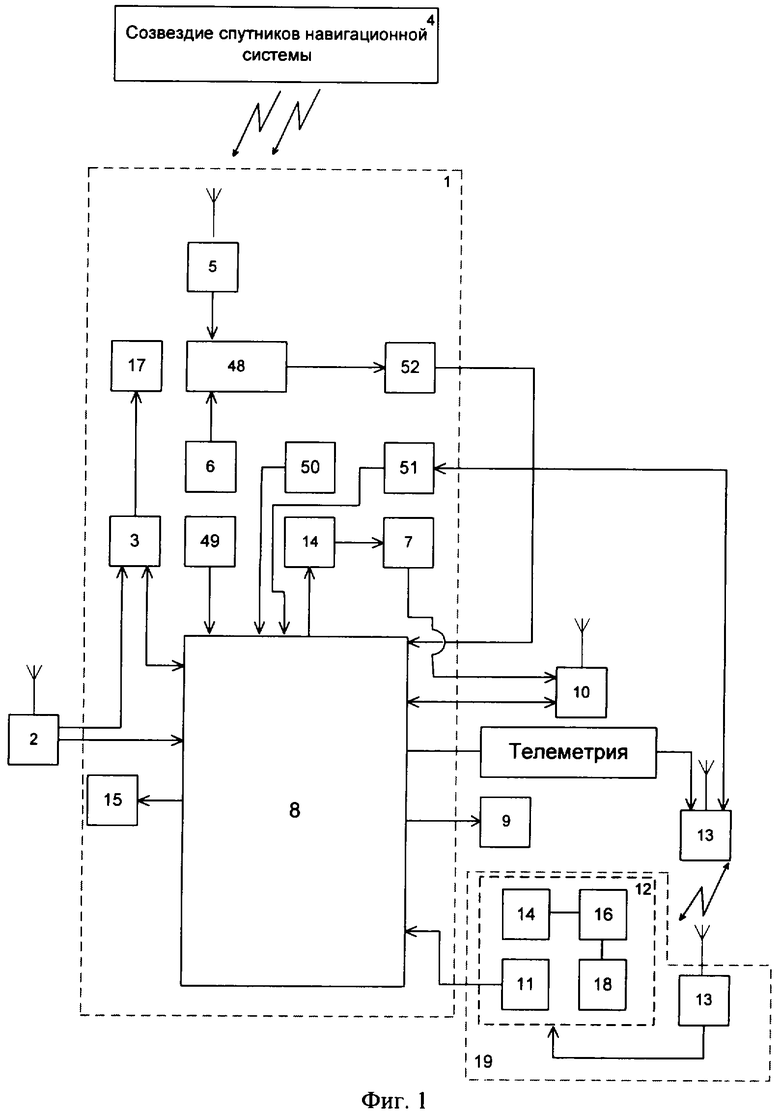
Авиационная система зондирования земной поверхности, включающая дистанционно-пилотируемый летательный аппарат с планером, силовой установкой с поршневым двигателем, бортовым комплексом управления дистанционно-пилотируемым летательным аппаратом, содержащим инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, вычислитель действительных координат спутниковой навигационной системы, систему воздушно-скоростных сигналов, высотомер, систему командного радиоуправления и обзорную телевизионную систему, систему автоконтроля работы бортовых систем, систему обеспечения посадки с устройством торможения основных колес шасси, систему управления двигателем и бортовой накопитель информации, а также мобильный наземный пункт управления, содержащий телевизионную систему, пульт дистанционного управления и радиотелеметрическую систему, содержащую две радиостанции, размещенные одна - на наземном пункте управления, а другая - на дистанционно-пилотируемом летательном аппарате, отличающаяся тем, что бортовой комплекс управления дистанционно-пилотируемым летательным аппаратом дополнительно содержит блок сопряжения с видеокамерой, своим входом соединенный с обзорной телевизионной системой, а выходом - с бортовым накопителем информации, блок сопряжения навигационных систем, одним из своих входов соединенный с выходом приемной аппаратуры спутниковой навигационной системы, другим - с выходом инерциальной навигационной системы, а выход блока сопряжения навигационных систем соединен с вычислителем действительных координат спутниковой навигационной системы, который выполнен с возможностью определения углов крена, тангажа и курса дистанционно-пилотируемого летательного аппарата, на планере в одной плоскости размещены три малогабаритные антенны, подключенные к приемной аппаратуре спутниковой навигационной системы, при этом они разнесены в пространстве относительно друг друга на 120°, мобильный наземный пункт управления дополнительно содержит мобильный персональный компьютер, включающий систему ввода поворотных пунктов маршрута, пульт дистанционного управления, выполненный с возможностью управления пространственным положением ДПЛА, систему обработки и отображения радиотелеметрии, выполненную с возможностью вывода цифровой и графической информации на экран мобильного персонального компьютера, каждая радиостанция содержит приемник, включающий входной полосовой фильтр, своим входом соединенный с приемопередающей антенной, а выходом - с защитным устройством, которое через полосовой фильтр соединено с малошумящим усилителем, в свою очередь малошумящий усилитель соединен с двумя перемножителями, каждый из которых соответственно соединен с арифметико-логическим устройством через последовательно соединенные первый фильтр нижних частот, усилитель нижних частот и второй фильтр нижних частот, при этом каждый из перемножителей другим своим входом соединен с генератором псевдослучайной последовательности, и передатчик, включающий источник данных, соединенный с возбудителем, который содержит последовательно соединенные формирователь видов работ (модулятор), преобразователь частот, полосовой пропускающий фильтр, при этом формирователь видов работ (модулятор) двумя входами соединен с датчиком опорных частот, который входом подключен к задающему генератору, а другим выходом - к датчику сетки частот, чей выход является вторым входом преобразователя частот, причем полосовой пропускающий фильтр возбудителя подключен к последовательно соединенным усилителю мощности из n каскадов и выходной цепи, при этом приемник и передатчик выполнены с возможностью использования шумоподобных сигналов, для передачи данных - с функцией Уолша, а для поиска сигнала и его синхронизации - с М-последовательностью.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| Способ получения искусственной пемзы | 1935 |
|
SU49228A1 |
| US 6229313 B1, 08.05.2001. | |||

