ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству обработки информации, способу обработки и считываемому компьютером носителю информации.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В последние годы активно проводилась медицинская диагностика и лечение на основе формирования движущихся изображений, при осуществлении которого используется излучение (например, рентгеновские лучи). В наши дни особенно часто применяется устройство формирования рентгеновских изображений, в котором используется детектор с плоской панелью (получаемый путем формирования тонкопленочного транзистора TFT из аморфного кремния и полупроводникового датчика на стеклянной подложке). Однако детектор с плоской панелью, в котором используется TFT из аморфного кремния, не может усиливать сигнал, фотоэлектрически преобразованный пикселем, и поэтому считывает накопленный заряд за счет сигнальной линии. Следовательно, вероятным становится генерирование шума в изображении под влиянием внутренних или внешних факторов. Недавно обнаружили, что этот шум включает в себя составляющие с пространственными частотами, которые перекрываются с частотами объекта, и составляющие с пространственными частотами, которые имеют малое перекрытие с частотами объекта.
Кроме того, при формировании изображений с применением излучения, формирование изображений тела человека следует проводить при малой дозе излучения, чтобы подавить подверженность воздействию излучения. Поэтому считывается сигнал с очень малым значением, и даже незначительная флуктуация, генерируемая в изображении, воспринимается визуально. Например, изменения в виде вертикально и горизонтально бегущих полос (именуемые далее шумом линии) ощутимо воспринимаются глазом человека и поэтому оказывают большое влияние на диагностическое изображение.
В качестве способа, который традиционно известен для снижения шума линии, используется пространственный фильтр, как описано в выложенной патентной заявке Японии № 2003-204955 (источник 1). В способе, описанном в источнике 1, проводят фильтрацию верхних частот для исходного изображения, содержащего шум линии, в направлении, перпендикулярном шуму линии. После этого, для обработанного изображения проводят горизонтально фильтрацию нижних частот. В результате получается изображение шума линии, которое вычитается из исходного изображения. Таким образом, понижают шум линии.
Кроме того, в выложенной патентной заявке Японии № 63-271668 (источник 2) описан способ достижения понижения шума, создающего лишь незначительную размытость и остаточное изображение за счет изменения коэффициента смешения между пространственным фильтром и рекурсивным фильтром в соответствии со степенью перемещения объекта. Помимо этого, в выложенной патентной заявке Японии № 60-065679 (источник 3) описан способ понижения шума линии за счет вычисления разности между текущим сигналом и сигналом, задержанным на один период сканирования, проведения пороговой обработки разности и обработки подавления, сложения обработанного сигнала с текущим сигналом.
В способе, описанном в источнике 1, шум линии подвергается пространственной фильтрации и вследствие этого понижается. К сожалению, этот способ оказывает незначительное влияние на шум линии на низких частотах в диапазоне пространственных частот, почти равном диапазону частот объекта.
Кроме того, в способе, описанном в источнике 2, изображение, подвергнутое двумерной пространственной фильтрации, подвергают рекурсивной фильтрации. Однако эффект рекурсивной фильтрации подавляется, когда объект находится в движении, в то время как эффект двумерной пространственной фильтрации оказывается относительно большим, когда объект неподвижен. Этот способ не позволяет исключить, например, шум, который имеет пространственные частоты, перекрывающиеся с пространственными частотами объекта, и изменяется во времени. Помимо этого, в способе, описанном в источнике 3, сигнал, задержанный на период сканирования в кадре, подвергается рекурсивной фильтрации. Следовательно, этот способ оказывает большое влияние на шум линии с временно высокими частотами, но оказывает малое влияние на шум линии с временно низкими частотами.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Данное изобретение предусматривает создание способа, который может обеспечить понижение шума, подавляя при этом влияние, оказываемое излучением на объект.
В соответствии с первым аспектом данного изобретения, предложено устройство обработки информации, содержащее: средства пространственной фильтрации, выполненные с возможностью осуществления пространственной фильтрации в диапазоне частот, основанном на пространственной частоте объекта, для данных изображения текущего кадра; и средство рекурсивной фильтрации, выполненное с возможностью осуществления рекурсивной фильтрации путем получения данных изображения, которые обработаны до текущего кадра, из запоминающего устройства, умножения полученных данных изображения на коэффициент α (α<1), сложения данных изображения, умноженных на коэффициент α, с данными изображения текущего кадра после пространственной фильтрации, и сохранения данных изображения после сложения в запоминающем устройстве.
В соответствии со вторым аспектом данного изобретения, предложен способ обработки для устройства обработки информации, содержащий этапы, на которых: осуществляют пространственную фильтрацию в диапазоне частот, основанном на пространственной частоте объекта, для данных изображения текущего кадра; и осуществляют рекурсивную фильтрацию путем получения данных изображения, которые обработаны до текущего кадра, из запоминающего устройства, умножения полученных данных изображения на коэффициент α (α<1), сложения данных изображения, умноженных на коэффициент α, с данными изображения текущего кадра после пространственной фильтрации, и сохранения данных изображения после сложения в запоминающем устройстве.
В соответствии с третьим аспектом данного изобретения, предложен считываемый компьютером носитель информации, хранящий компьютерную программу, которая при исполнении вызовет осуществление компьютером вышеописанного способа.
Дополнительные признаки данного изобретения станут ясными из нижеследующего описания примерных вариантов осуществления со ссылками на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в описание изобретения и составляют его часть, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для пояснения принципов изобретения, на чертежах:
Фиг.1 изображает блок-схему, иллюстрирующую пример конфигурации устройства обработки информации в соответствии с первым вариантом осуществления данного изобретения;
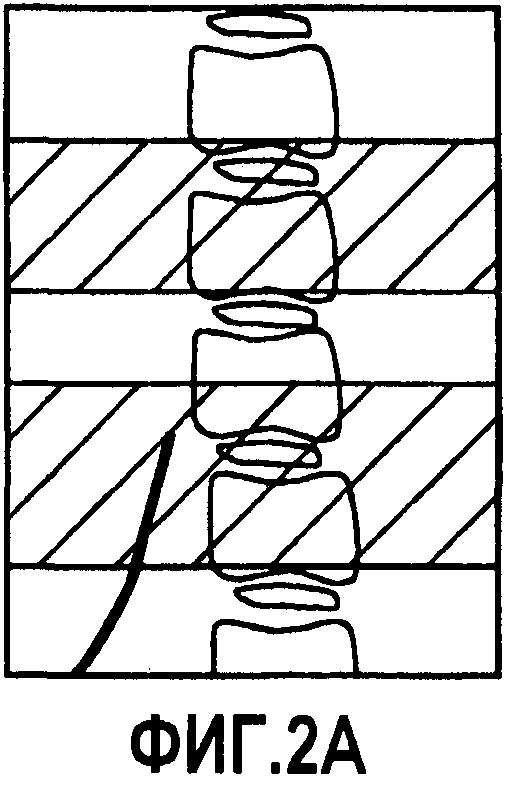
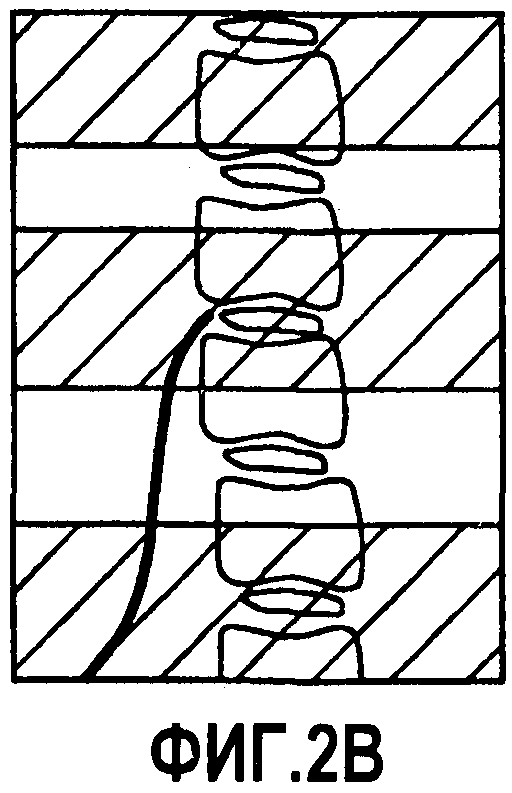
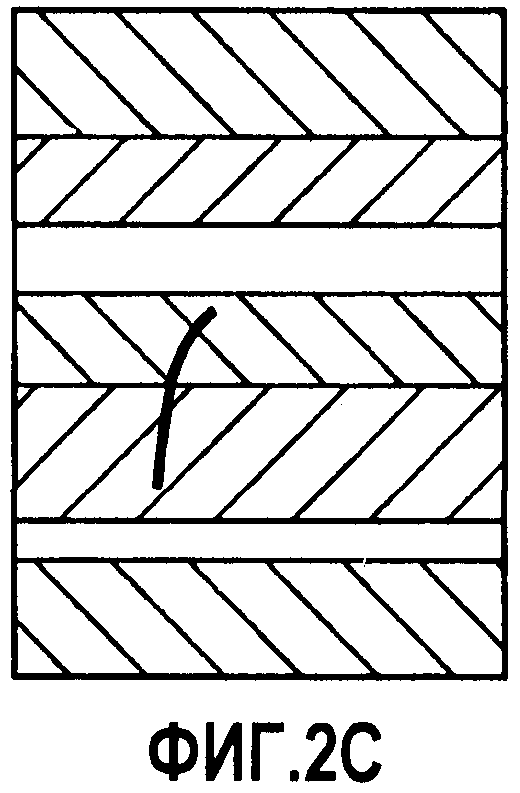
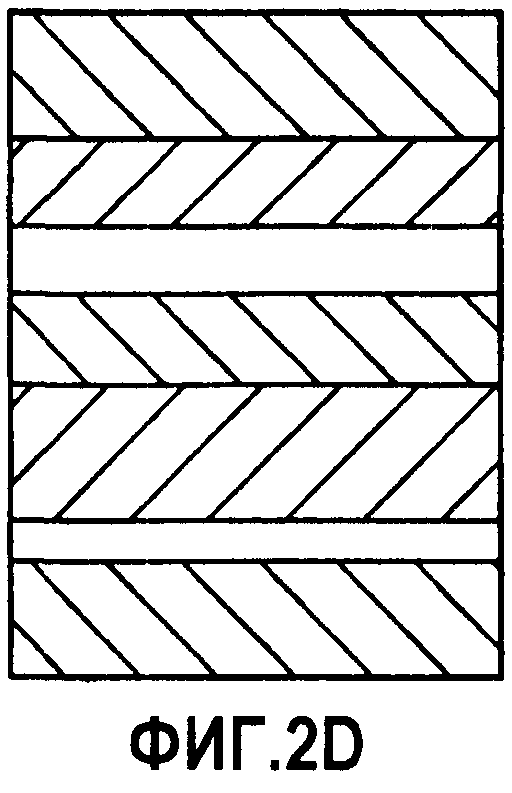
Фиг.2A-2F изображают виды, иллюстрирующие процесс понижения шума линии;
Фиг.3 изображает блок-схему последовательности операций, иллюстрирующую пример последовательности операций устройства обработки информации, показанного на фиг.1;
Фиг.4 изображает диаграмму, иллюстрирующую эффект понижения шума линии в соответствии с первым вариантом осуществления;
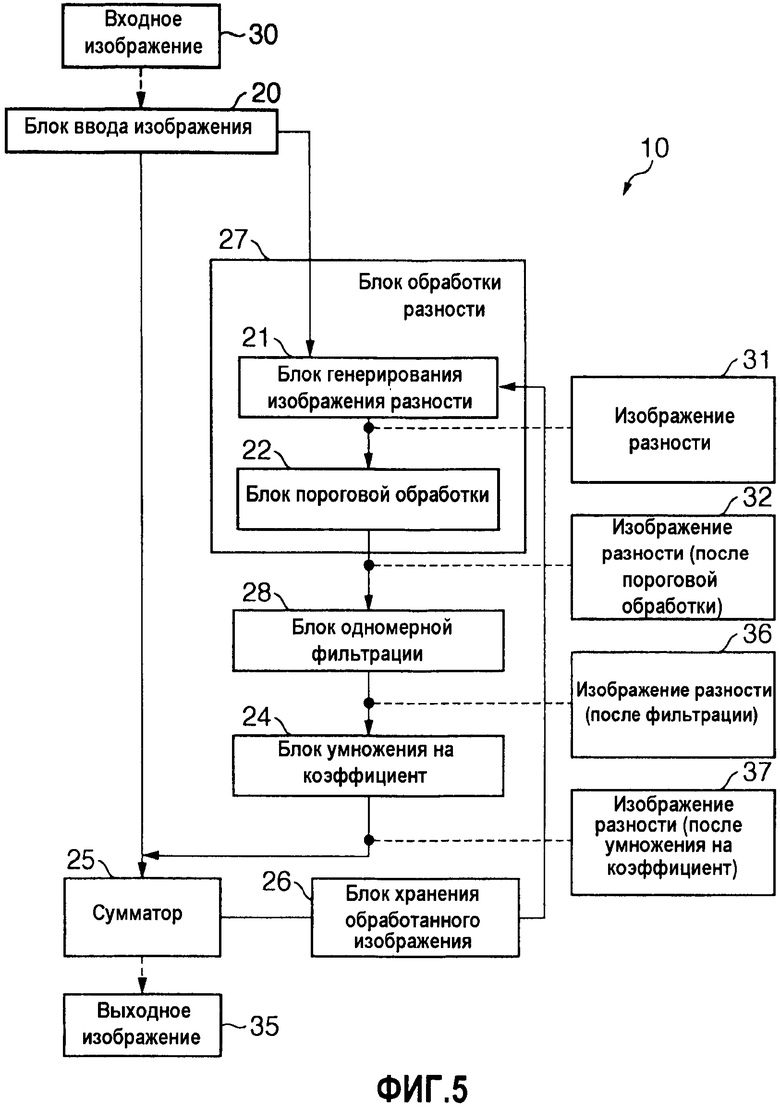
Фиг.5 изображает блок-схему, иллюстрирующую пример конфигурации устройства обработки информации в соответствии со вторым вариантом осуществления;
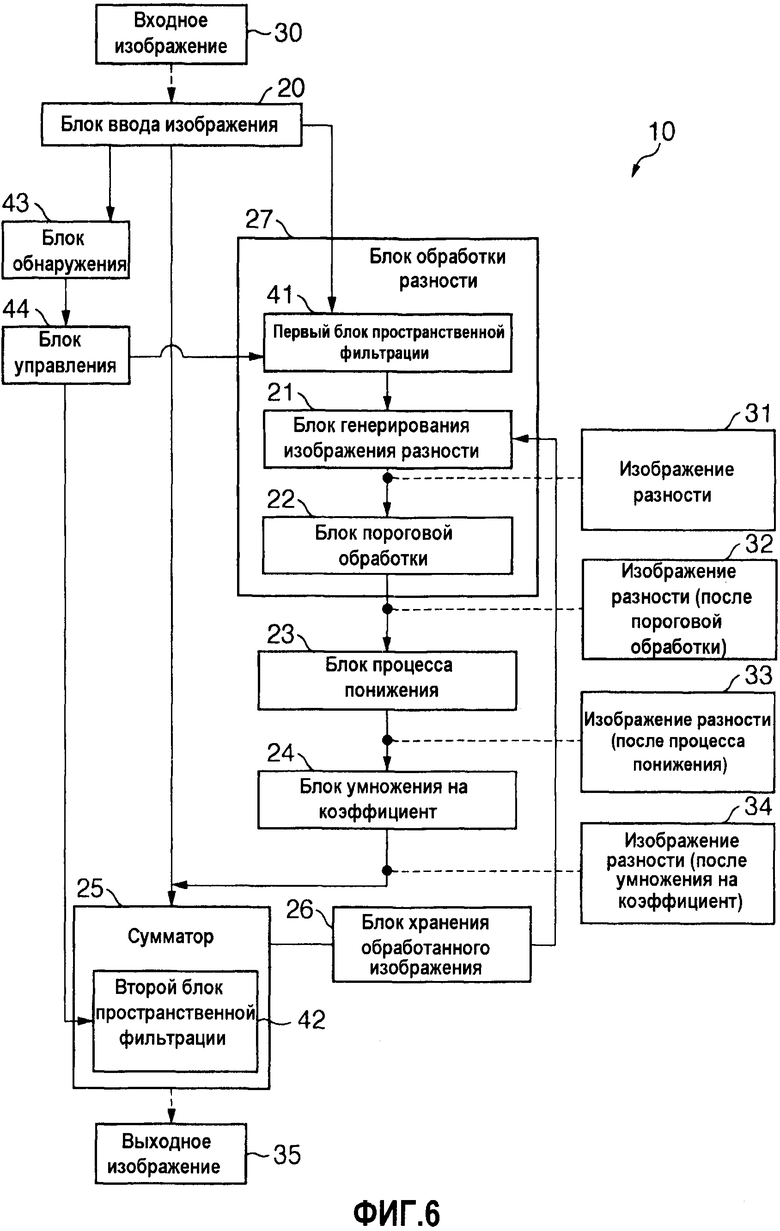
Фиг.6 изображает блок-схему, иллюстрирующую пример конфигурации устройства обработки информации в соответствии с третьим вариантом осуществления; и
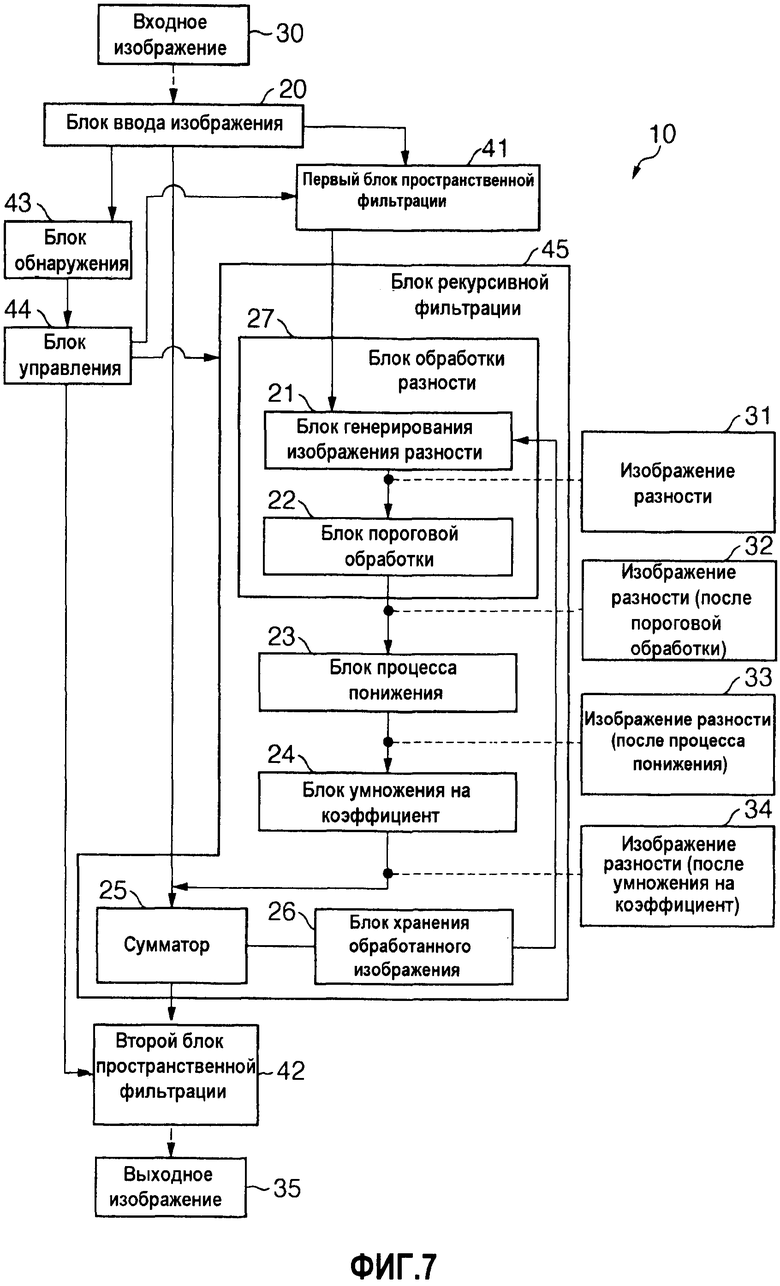
Фиг.7 изображает блок-схему, иллюстрирующую другой пример конфигурации устройства обработки информации в соответствии с третьим вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Теперь, со ссылками на чертежи, будут описаны варианты осуществления данного изобретения.
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг.1 изображает блок-схему, иллюстрирующую пример функциональной конфигурации устройства обработки информации в соответствии с первым вариантом осуществления данного изобретения.
Устройство 10 обработки информации включает в себя один или множество встроенных компьютеров. Компьютер включает в себя, например, главное средство управления, такое как центральный процессор (CPU), и средства хранения, такие как ROM (постоянное запоминающее устройство) и RAM (оперативное запоминающее устройство). Компьютер также может включать в себя средство управления графикой, такое как GPU (графический процессор), средство связи, такое как сетевая плата, и средство ввода-вывода, такое как клавиатура, дисплей или тактильная панель. Отметим, что эти составляющие средства соединены посредством шины и управляются путем исполнения программ, хранимых в средствах хранения, средством управления.
В качестве его функциональной конфигурации отметим, что устройство 10 обработки информации включает в себя блок 20 ввода изображения, блок 23 процесса понижения, блок 24 умножения на коэффициент, сумматор 25, блок 26 хранения обработанного изображения и блок 27 обработки разности. В этом варианте осуществления случайный шум будет приведен в качестве примера шума с пространственными частотами, которые имеют незначительное перекрытие с пространственными частотами объекта, а шум линии (изменения в виде вертикально и горизонтально бегущих полос) будет приведен в качестве примера шума, имеющего пространственные частоты, которые перекрываются с пространственными частотами объекта, но изменяются по временной оси.
Блок 20 ввода изображения обеспечивает ввод извне одного кадра (именуемого далее входным изображением) движущегося изображения (непрерывных кадров). То есть, блок 20 ввода изображения обеспечивает ввод данных изображения текущего кадра. Входное изображение 30 представляет собой, например, двумерное изображение n (строк) × m (столбцов). Входное изображение 30 в соответствии с этим вариантом осуществления содержит шум линии (изменения в виде вертикально и горизонтально бегущих полос) в заданном направлении и объект, как показано заштрихованными участками на фиг.2В. Хотя рассматривается случай, в котором заданное направление является горизонтальным направлением, и в качестве примера будет приведен шум горизонтальной линии в данном варианте осуществления, заданное направление, в сущности, может быть и вертикальным. Хотя двумерное изображение является, например, изображением, захватываемым с помощью рентгеновских лучей, оно не всегда должно быть изображением, захватываемым с помощью рентгеновских лучей.
Блок 26 хранения обработанного изображения функционирует как запоминающее устройство, которое удерживает (хранит) ранее обработанное выходное изображение (изображение за один кадр до текущего кадра в этом варианте осуществления). Блок 27 обработки разности служит для генерирования изображения разности и включает в себя блок 21 генерирования изображения разности и блок 22 пороговой обработки. Блок 21 генерирования изображения разности генерирует изображение 31 разности между входным изображением 30 и изображением, хранящимся в блоке 26 хранения обработанного изображения (т.е. выходным изображением 35 за один кадр до текущего кадра). Отметим, что при обработке первого кадра в движущемся изображении выдается из изображения 31 разности изображение, идентичное входному изображению 30, потому что изображение за один кадр до этого кадра не существует.
Отметим, что выходное изображение 35 за один кадр до текущего кадра также содержит шум линии в заданном направлении, как показано на фиг.2А, и этот шум обычно изменяется во времени. Поэтому сигналы шума линии генерируются в разных областях в изображениях, показанных на фиг.2А и 2В. Хотя для простоты описания здесь в качестве примера приводится случай, в котором изображения, показанные на фиг.2А и 2В, имеют сигналы шума линии с той же амплитудой, сигналы шума линии, генерируемые в действительности в этих изображениях, не обязательно должны иметь одну и ту же амплитуду в пространстве и времени. Изображение 31 разности, генерируемое блоком 31 генерирования изображения разности, содержит шум линии (заштрихованные участки), шум линии (участки с противоположной штриховкой) с амплитудой, противоположной по знаку амплитуде первого шума, и область, в которой объект переместился, как показано на фиг.2С.
Блок 22 пороговой обработки осуществляет пороговую обработку для изображения 31 разности, генерируемого блоком 21 генерирования изображения разности. Более конкретно, блок 22 пороговой обработки вычисляет абсолютное значение каждого пикселя в изображении 31 разности и осуществляет пороговую обработку для абсолютного значения с использованием заданного значения. Например, заданное значение устанавливается несколько большим, чем стандартное отклонение шума линии. Если результат обработки показывает, что присутствует пиксель с абсолютным значением, которое превышает заданное значение, то определяют, что этот пиксель отображает движение объекта, и этот пиксель заменяют на «0» или умножают на коэффициент, меньший чем «1». Изображение 32 разности (после пороговой обработки), получаемое посредством этой обработки, предполагает состояние, в котором движение объекта устранено, как показано на фиг.2D.
Изображение 31 разности содержит случайный шум для каждого пикселя в больших количествах, так что иногда трудно выявить различия между движением и случайным шумом в этом изображении. В этом случае блок 22 пороговой обработки может обрабатывать изображение 31 разности с использованием, например, двумерного сглаживающего фильтра (пространственной фильтрации) перед вышеупомянутой пороговой обработкой. То есть вышеупомянутую пороговую обработку осуществляют после понижения случайного шума. При условии этой обработки можно понизить частоту ошибочного различения между случайным шумом и движением, тем самым позволяя определение движения с повышенной точностью. Такая пространственная фильтрация эффективна, когда разность по пространственной частоте между шумом и объектом мала. Диапазон фильтрации этого пространственного фильтра определяется на основании пространственной частоты объекта, получаемой из блока анализа частоты (не показан). Таким образом, шум можно понизить, при этом сохраняя информацию об объекте в изображении. Блок анализа частоты анализирует частоту объекта с использованием известного способа, такого, как преобразование Фурье. Кроме того, в качестве пространственной частоты объекта можно использовать значение, которое экспериментально определяют заранее.
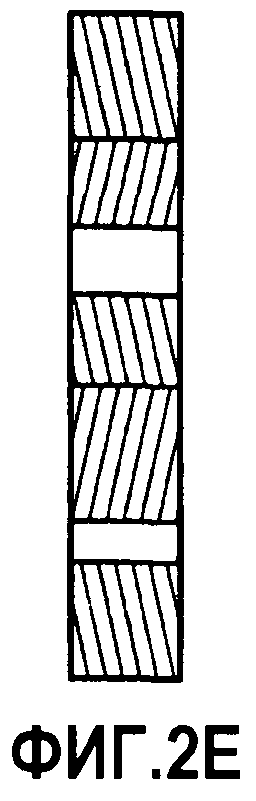
Блок 23 процесса понижения функционирует как блок генерирования изображения шума, который генерирует изображение шума линии. То есть, блок 23 процесса понижения понижает изображение 32 разности (после пороговой обработки) в заданном направлении (таком же направлении, как направление, в котором идет шум линии), тем самым генерируя изображение 33 разности (после процесса понижения), которое содержит составляющие шума в качестве своих принципиальных составляющих. Изображение 33 разности (после процесса понижения) понижают в заданном направлении (горизонтальном направлении). Во время этого процесса понижения соответствующие пиксели в изображении (изображении 32 разности (после пороговой обработки)), например, линейно соединяются друг с другом в заданном направлении (горизонтальном направлении в этом варианте осуществления). При линейном соединении изображение 32 разности (после пороговой обработки) подвергают горизонтальному понижению, принимая среднее из k пикселей (k≥2) за один пиксель. Процесс понижения, например, может быть общепринятым процессом прореживания. При осуществлении этого процесса понижения, случайный шум усредняют и тем самым понижают, так что генерируется изображение 33 разности (после процесса понижения), которое содержит составляющие шума в качестве своих принципиальных составляющих, как показано на фиг.2Е.
Блок 24 умножения на коэффициент умножает каждый пиксель в изображении 33 разности (после процесса понижения) на коэффициент α для генерирования изображения 34 разности (после умножения на коэффициент). Коэффициент α равен, например, значению, меньшему чем «1» (α<1). Частотные характеристики рекурсивного фильтра во временном направлении определяются в соответствии со значением этого коэффициента. Поскольку частотные характеристики этого фильтра во временном направлении определяются в соответствии с величиной коэффициента α, значение коэффициента α экспериментально определяют так, чтобы можно было отделить шум от движения объекта (например, тела человека). В альтернативном варианте, возможно выделить объект и определить значение коэффициента α из движения краевой части во временном направлении. Отметим, что поскольку шум линии временно сдвигается относительно движения объекта (например, тела человека), его следует подавлять при определении фильтра во временной области.
Сумматор 25 складывает изображение 34 разности (после умножения на коэффициент) с входным изображением 30. Процесс сложения можно осуществлять после интерполяции пониженного изображения до размера входного изображения 30 с использованием широко известного способа интерполяции.
Значение Xt(i) пикселя входного изображения 30, значение Yt(i) пикселя выходного изображения 35, основанного на входном изображении 30, значение Yt-1(i) пикселя выходного изображения за один кадр до текущего кадра и коэффициент α, на который блок 24 умножения на коэффициент умножает каждый пиксель, имеют следующую связь:
где F - функция, отображающая, например, пороговую обработку и процесс горизонтального понижения.
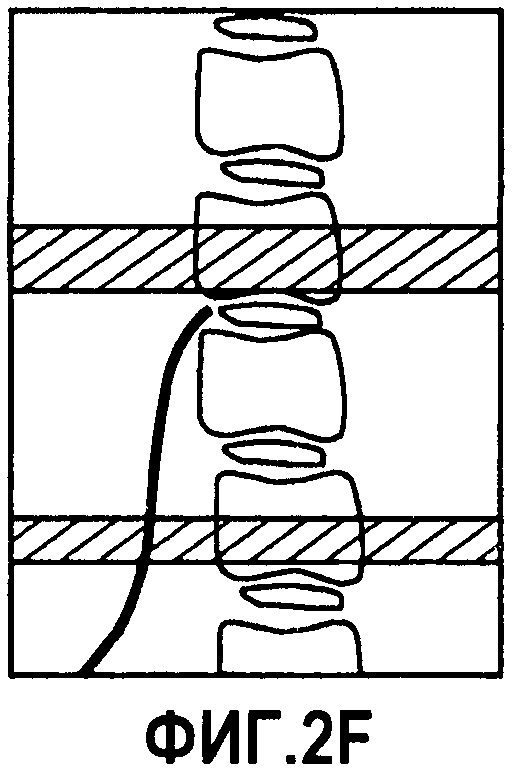
В результате, шум линии во входном изображении 30 сглаживается во временном направлении в соответствии с коэффициентом α, как показано на фиг.2F. Заштрихованные участки на фиг.2F обозначают состояние, в котором шум линии частично остается, но несмотря на это, остаточный шум, обозначенный заштрихованными участками, сглаживается при дальнейшей обработке кадров.
Таким образом, в этом варианте осуществления избирательно осуществляется рекурсивная фильтрация для составляющих шума линии, что ведет к подавлению составляющих шума линии в серии/последовательности движущихся изображений, получаемых в результате (то есть, множества выходных изображений 35).
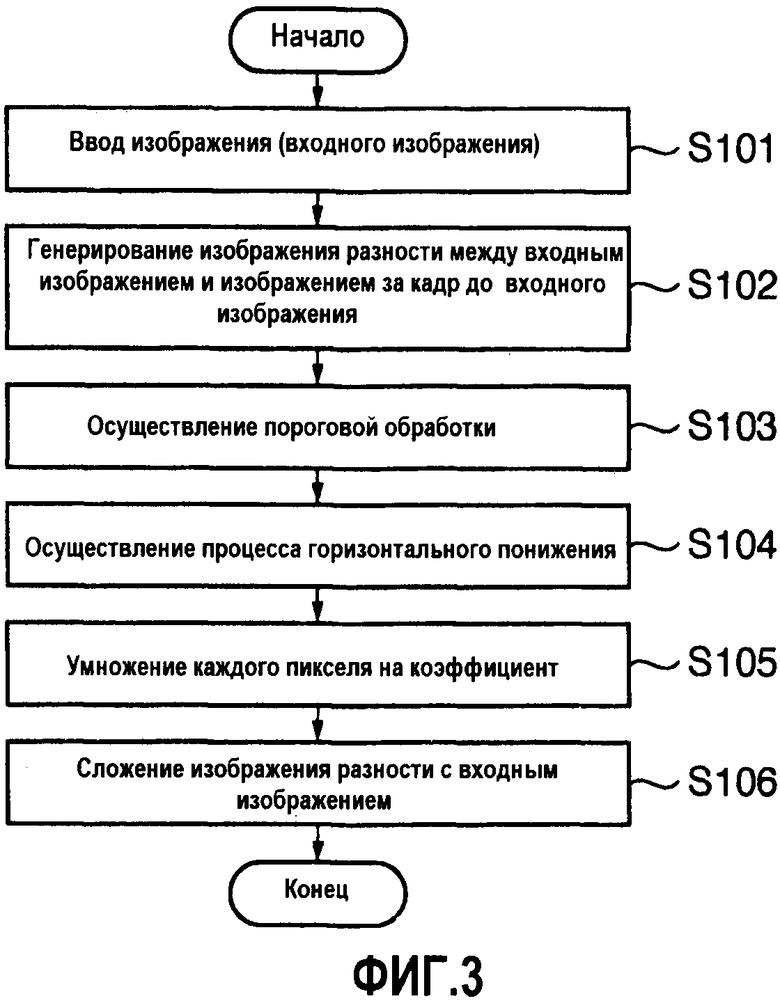
Далее, со ссылками на фиг.3, будет описан пример последовательности процесса понижения шума линии в устройстве 10 обработки информации, показанном на фиг.1.
Этот процесс начинается, когда устройство 10 обработки информации использует блок 20 ввода изображения, чтобы осуществить ввод извне (S101) одного кадра (входного изображения 30) движущегося изображения. Ввод движущегося изображения можно осуществить, например, через сеть или носитель информации, такой, как карта памяти.
Затем устройство 10 обработки информации использует блок 21 генерирования изображения разности для генерирования (S102) изображения разности (изображения 31 разности) между входным изображением 30 и изображением непосредственно перед входным изображением 30 (т.е. за один кадр до него). Отметим, что изображение за один кадр до входного изображения 30 получают из блока 26 хранения обработанного изображения.
После завершения генерирования изображения 31 разности, устройство 10 обработки информации использует блок 22 пороговой обработки для осуществления пороговой обработки (S103) для генерированного изображения 31 разности. После этого устройство 10 обработки информации использует блок 23 осуществления процесса понижения, чтобы понизить (S104) изображение 32 разности (после пороговой обработки) в заданном направлении (горизонтальном направлении в этом примере).
После завершения процесса понижения, устройство 10 обработки информации использует блок 24 умножения на коэффициент, чтобы умножить (S105) каждый пиксель в изображении 33 разности (после процесса понижения) на коэффициент (например, значение, меньшее чем «1»). Частотные характеристики рекурсивного фильтра во временном направлении определяются в соответствии со значением этого коэффициента, как описано выше.
И, наконец, устройство 10 обработки информации использует сумматор 25 для сложения (S106) изображения 34 разности (после умножения на коэффициент) с входным изображением 30, введенным на этапе S101. Таким образом, после сложения, при вычитании шума линии из входного изображения 30 получается выходное изображение 35 (т.е. изображение с меньшим шумом линии).
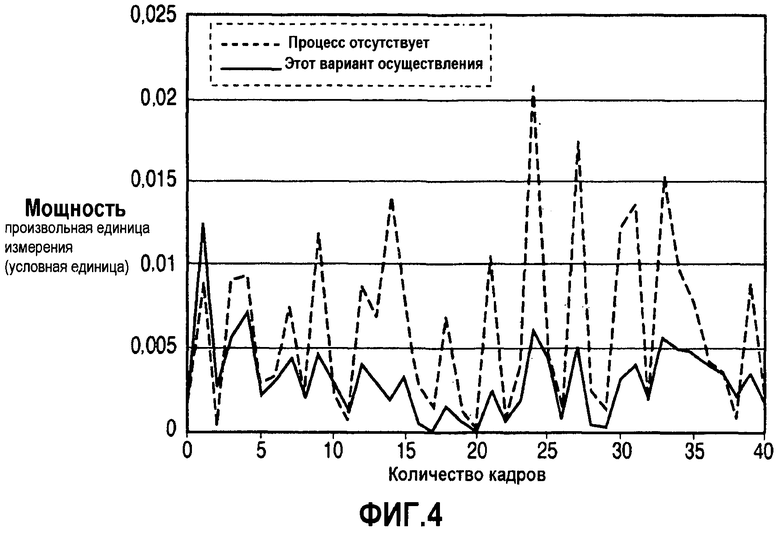
Далее, со ссылками на фиг.4, будет описан эффект понижения шума линии в этом варианте осуществления.
Обращаясь к фиг.4, отмечаем, что абсцисса указывает количество кадров в движущемся изображении, а ордината обозначает спектр мощности шума линии. Спектр мощности вычисляют с использованием движущегося изображения с шагом пикселей, составляющим 300 мкм, и размером 1000×1000 пикселей. Следовательно, частота Найквиста составляет 1,56 пар линий на миллиметр.
Шум линии, подвергнутый анализу спектра мощности, сводится к диапазону частот, соответствующему 7 парам линий на метр, так что процесс понижения в этом варианте осуществления дает эффект до диапазона частот, в котором трудно понизить шум линии для процесса понижения шума линии, использующего обычный пространственный фильтр. Как можно увидеть из сравнения между спектрами мощности в «процесс отсутствует (пунктирная линия)» и «этот вариант осуществления (сплошная линия)», мощность шума линии понижается до половины или менее в этом варианте осуществления.
Второй вариант осуществления
Далее будет описан второй вариант осуществления. Фиг.5 изображает блок-схему, иллюстрирующую пример функциональной конфигурации устройства 10 обработки информации в соответствии со вторым вариантом осуществления. Отметим, что те же ссылочные позиции обозначают составляющие элементы, которые демонстрируют те же функции, что и в функциональной конфигурации, показанной на фиг.1, на которую сделаны ссылки в описании первого варианта осуществления, поэтому их описание иногда будет опущено. Описано будет главным образом различие между первым и вторым вариантами осуществления.
Устройство 10 обработки информации включает в себя блок 20 ввода изображения, блок 24 умножения на коэффициент, сумматор 25, блок 26 хранения обработанного изображения, блок 27 обработки разности и блок 28 одномерной фильтрации. То есть, устройство 10 обработки информации получено путем исключения блока 23 процесса понижения из конфигурации, показанной на фиг.1, на которую делались ссылки при описании первого варианта осуществления, и добавления блока 28 одномерной фильтрации в эту конфигурацию.
Блок 28 одномерной фильтрации функционирует как блок генерирования изображения шума, который генерирует изображение шума линии. То есть, блок 28 одномерной фильтрации осуществляет одномерную сглаживающую фильтрацию для изображения 32 разности в заданном направлении (таком же направлении, как то, в котором идет шум линии), тем самым генерируя изображение 36 разности (после фильтрации), которое содержит составляющие шума линии в качестве его принципиальных составляющих. Одномерный сглаживающий фильтр может быть широко известным фильтром, таким, как усредняющий фильтр, фильтр Гаусса или медианный фильтр. При этой фильтрации случайный шум усредняется и тем самым понижается, так что генерируется изображение 36 разности (после фильтрации), которое содержит составляющие шума линии в качестве своих принципиальных составляющих.
После фильтрации устройство 10 обработки информации использует блок 24 умножения на коэффициент, чтобы умножить изображение 36 разности (после фильтрации) на коэффициент и использует сумматор 25 для сложения изображения 37 разности (после умножения на коэффициент) с входным изображением 30. Таким образом, во втором варианте осуществления, как и в первом варианте осуществления, можно избирательно проводить рекурсивную фильтрацию шума линии.
Отметим, что работа устройства 10 обработки информации в соответствии со вторым вариантом осуществления следует той же последовательности операций, что и на фиг.3, на которую делались ссылки при описании первого варианта осуществления, а ее описание со ссылками на чертежи приведено не будет. Различие между первым и вторым вариантами осуществления заключается в том, что в последнем на этапе S104 осуществляют вышеописанную одномерную фильтрацию вместо процесса горизонтального понижения в первом.
Третий вариант осуществления
Далее будет описан третий вариант осуществления, в котором процессы понижения шума, описанные в первом и втором вариантах осуществления, использующие пространственный фильтр, как описано в первоисточнике 1, осуществляются в сочетании, пример которого и приводится в третьем варианте осуществления.
На фиг.6 представлена блок-схема, иллюстрирующая пример функциональной конфигурации устройства 10 обработки информации в соответствии с третьим вариантом осуществления. Отметим, что те же ссылочные позиции обозначают составляющие элементы, которые демонстрируют те же функции, что и в функциональной конфигурации, показанной на фиг.1. Описано будет главным образом различие между первым и третьим вариантами осуществления.
В дополнение к конфигурации, показанной на фиг.1, на которую сделаны ссылки в описании первого варианта осуществления, устройство 10 обработки информации включает в себя первый блок 41 пространственной фильтрации, второй блок 42 пространственной фильтрации, блок 43 обнаружения и блок 44 управления.
Первый блок 41 пространственной фильтрации осуществляет процесс понижения шума, который использует пространственный фильтр, для входного изображения 30. Когда, например, перемещение объекта велико, а влияние запаздывания изображения существенно, процессы понижения шума, описанные в первом и втором вариантах осуществления, проводятся после процесса понижения шума, который использует пространственный фильтр, и осуществляется первым блоком 41 пространственной фильтрации. В этом случае, поскольку заданное значение (порог), используемое для блока 22 пороговой обработки, можно сделать малым, можно получить изображение с малым остаточным изображением. То есть, процесс понижения шума посредством первого блока 41 пространственной фильтрации эффективен, когда перемещение объекта велико, а влияние остаточного изображения существенно. Отметим, что в процессе понижения шума, который предусматривает использование пространственного фильтра, возможно применение обычных способов (см., например, источник 1), а их описание приведено не будет.
Второй блок 42 пространственной фильтрации осуществляет процесс понижения шума, который использует пространственный фильтр, для изображения, обработанного сумматором 25. То есть, второй блок 42 пространственной фильтрации осуществляет тот же процесс, что и первый блок 41 пространственной фильтрации, хотя они обрабатывают разные изображения. Например, после осуществления процессов понижения шума, описанных в первом и втором вариантах осуществления, второй блок 42 пространственной фильтрации анализирует составляющие пространственной частоты остаточного шума линии. После этого второй блок 42 пространственной фильтрации осуществляет процесс понижения шума, который использует пространственный фильтр для пространственных частот, получаемых путем этого анализа. В этом случае нет необходимости проводить пространственную фильтрацию в неоправданно широком диапазоне. Например, как в случае изображения, описывающего природу, важна пространственная частотная составляющая низкой частоты. Таким образом, возможно предотвратить размытость объекта, если процесс понижения шума посредством второго блока 42 пространственной фильтрации ограничен по составляющей пространственной частоты.
Блок 43 обнаружения обнаруживает интенсивность шума линии и движение объекта, причем оба во входном изображении 30. Отметим, что для обнаружения интенсивности шума линии и движения объекта может использоваться обычный способ (см., например, источник 2), описание которого не приводится.
В соответствии с конфигурацией, описанной выше, процесс понижения шума, который использует пространственный фильтр, осуществляется до или после воплощения процесса понижения шума, описанного в первом и втором вариантах осуществления, в соответствии с интенсивностью шума линии и движением объекта. Таким образом, процессы понижения шума линии осуществляются адаптивно, так что можно получить малое остаточное изображение и малую размытость движущегося объекта. То есть, можно понизить шум, подавляя при этом влияние, которое излучение оказывает на объект.
Конфигурация устройства 10 обработки информации в соответствии с третьим вариантом осуществления, показанная на фиг.6, является лишь примером и может быть должным образом изменена. Например, блок 43 обнаружения и блок 44 управления не являются обязательными составляющими элементами и могут быть исключены. Если эти составляющие элементы исключены, процессы, осуществляемые первым блоком 41 пространственной фильтрации и вторым блоком 42 пространственной фильтрации, могут осуществляться одинаково. Кроме того, например, не обязательно предусматривать и первый блок 41 пространственной фильтрации, и второй блок 42 пространственной фильтрации, и можно предусмотреть лишь один из них.
Более того, как указано в первоисточнике 2, можно позаимствовать конфигурацию, которая, например, осуществляет первые процессы понижения шума, как описано в первом и втором вариантах осуществления, и второй процесс понижения шума, который использует пространственный фильтр, при изменении соотношения процессов. Эту конфигурацию можно реализовать путем заимствования конфигурации, показанной, например, на фиг.7. То есть, блок 44 управления осуществляет первый процесс понижения шума посредством блока 45 рекурсивной фильтрации и второй процесс понижения шума, который использует пространственный фильтр, при изменении соотношения процессов, в соответствии с результатами обнаружения, полученными посредством блока 43 обнаружения. Отметим, что изменение в соотношении процессов имеет место на основании интенсивности шума линии и движения объекта. В этом случае процессы понижения шума осуществляются адаптивно, так что можно получить движущееся изображение с малым остаточным изображением и малой размытостью объекта.
Хотя выше были описаны примерные варианты осуществления данного изобретения, данное изобретение не ограничивается вариантами осуществления, описанными выше и показанными на чертежах, и может быть надлежащим образом модифицировано и воплощено на практике без отклонения от объема данного изобретения.
В качестве примера отметим, что хотя случай, в котором изображение за один кадр до текущего кадра используется при обработке разности, приведен как пример в первом и втором вариантах осуществления, данное изобретение этим не ограничивается, и можно использовать, например, изображение более чем за один кадр до текущего кадра или множество изображений двух или более разных кадров. Например, это зависит от составляющей частоты и может предусматривать расположение ее в незанятом интервале времени, если предполагается использование обычного пространственного фильтра и приходится иметь дело с многочисленными кадрами.
В качестве другого примера отметим, что хотя в вариантах осуществления с первого по третий лишь данные изображения кадра, обработанного до текущего кадра, умножаются на коэффициент α (кратное коэффициенту α), данное изобретение этим не ограничивается. Например, можно умножать данные изображения текущего кадра на значение, соответствующее коэффициенту α, на который умножаются данные изображения кадра, обработанного перед текущим кадром.
Данное изобретение можно воплотить, например, в виде системы, устройства, способа и программы или носителя информации. Более конкретно, данное изобретение может быть применено к системе, включающей в себя множество устройств, или к прибору, включающему в себя лишь одно устройство.
Другие варианты осуществления
Аспекты данного изобретения также можно реализовать посредством компьютера системы или устройства (или устройств, таких как центральный процессор или микропроцессор), который считывает и исполняет программу, записанную в запоминающем устройстве, для выполнения функций вышеописанного варианта (вышеописанных вариантов) осуществления, и посредством способа, этапы которого осуществляются компьютером системы или устройства посредством, например, считывания и исполнения программы, записанной в запоминающем устройстве, для выполнения функций вышеописанного варианта (вышеописанных вариантов) осуществления. С этой целью на компьютер устанавливают программу, например, через сеть или с носителя информации разных типов, служащего в качестве запоминающего устройства (например, считываемого компьютером носителя информации).
Хотя данное изобретение описано со ссылками на примерные варианты осуществления, следует понимать, что изобретение не ограничивается описанными примерными вариантами осуществления. Объем нижеследующей формулы изобретения следует рассматривать в самом широком толковании, так чтобы охватывать все такие модификации и эквивалентные конструкции и функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ ОБРАБОТКИ И СЧИТЫВАЕМЫЙ КОМПЬЮТЕРОМ НОСИТЕЛЬ ИНФОРМАЦИИ | 2010 |
|
RU2526761C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2541881C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2527751C2 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2384006C1 |
| ОБРАБОТКА ДАННЫХ ИЗОБРАЖЕНИЯ, СОДЕРЖАЩИХ ЭФФЕКТ ТУРБУЛЕНТНОСТИ В ЖИДКОЙ СРЕДЕ | 2012 |
|
RU2559764C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2660612C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2533444C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2524872C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2543306C2 |
Изобретение относится к способу обработки информации. Техническим результатом является расширение функциональных возможностей обработки изображения за счет обеспечения понижения шума, подавляя при этом влияние, оказываемое излучением на объект. Устройство обработки информации содержит средство пространственной фильтрации для осуществления пространственной фильтрации в диапазоне частот, основанном на пространственной частоте объекта, для данных изображения текущего кадра, и средство рекурсивной фильтрации для осуществления рекурсивной фильтрации путем получения данных изображения, которые обработаны до текущего кадра, из запоминающего устройства, умножения полученных данных изображения на коэффициент α(α<1), сложения данных изображения, умноженных на коэффициент α, с данными изображения текущего кадра после пространственной фильтрации, и сохранения данных изображения после сложения в запоминающем устройстве. 7 н. и 15 з.п. ф-лы, 12 ил.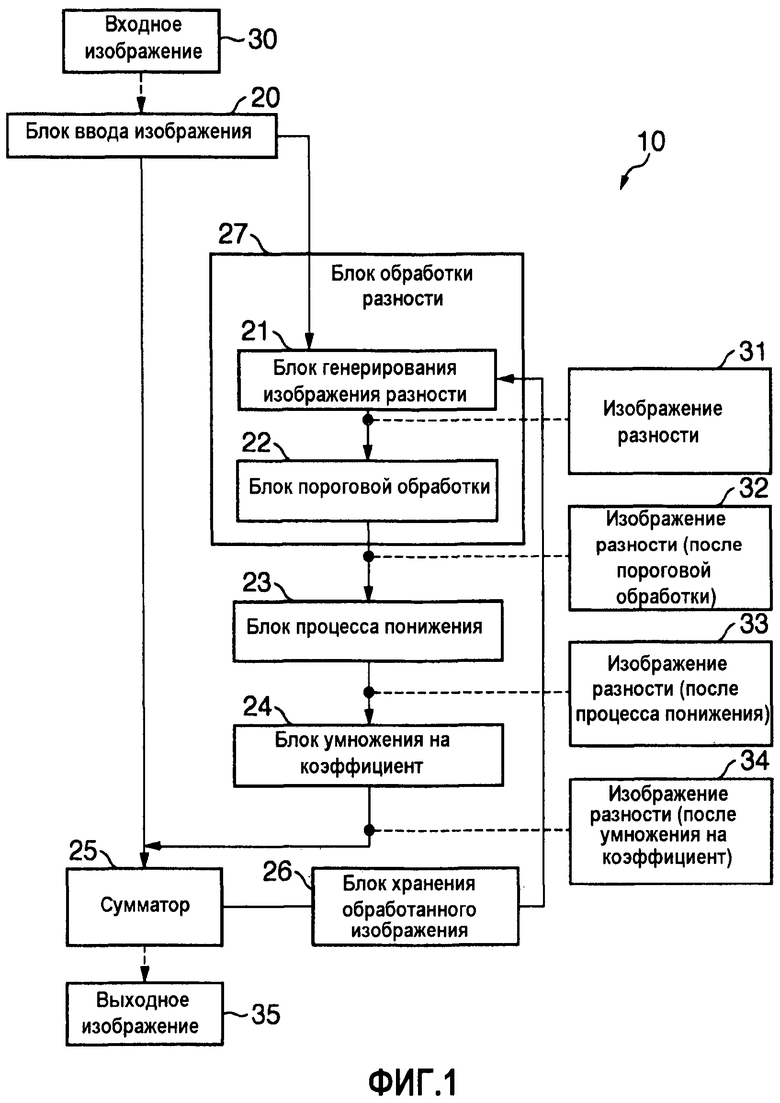
1. Устройство (10) обработки информации, содержащее:
средство (41, 42) пространственной фильтрации, выполненные с возможностью осуществления пространственной фильтрации в диапазоне частот, основанном на пространственной частоте объекта, для данных изображения текущего кадра, и
средство (45) рекурсивной фильтрации, выполненное с возможностью осуществления рекурсивной фильтрации путем получения данных изображения, которые обработаны до текущего кадра, из запоминающего устройства, умножения полученных данных изображения на коэффициент α (α<1), сложения данных изображения, умноженных на коэффициент α, с данными изображения текущего кадра после пространственной фильтрации, и сохранения данных изображения после сложения в запоминающем устройстве.
2. Устройство по п.1, в котором коэффициент α определен на основании движения объекта посредством средства (43) обнаружения.
3. Устройство по п.1, дополнительно содержащее:
средство (43) обнаружения, выполненное с возможностью обнаружения интенсивности шума линии и движения объекта, причем оба в данных изображения текущего кадра, и
средство (44) управления, выполненное с возможностью осуществления процесса посредством упомянутых средств пространственной фильтрации и процесса посредством упомянутого средства рекурсивной фильтрации во время переключения процессов с одного на другой в соответствии с результатами обнаружения, полученными упомянутым средством обнаружения.
4. Устройство по п.1, дополнительно содержащее:
средство (43) обнаружения, выполненное с возможностью обнаружения интенсивности шума линии и движения объекта, причем оба в данных изображения текущего кадра, и
средство (44) управления, выполненное с возможностью осуществления процесса посредством упомянутых средств пространственной фильтрации и процесса посредством упомянутого средства рекурсивной фильтрации во время изменения соотношения процессов между ними в соответствии с результатами обнаружения, полученными упомянутым средством обнаружения.
5. Устройство по п.1, в котором упомянутое средство рекурсивной фильтрации включает в себя:
средство (27) обработки разности, выполненное с возможностью генерирования изображения разности между данными изображения текущего кадра и данными изображения, которые обработаны до текущего кадра,
средство (23) генерирования изображения шума, выполненное с возможностью генерирования изображения шума линии из изображения разности, сгенерированного средством обработки разности,
блок (24) умножения на коэффициент, выполненный с возможностью умножения каждого пикселя в изображении шума линии, сгенерированного средством генерирования шума, на коэффициент α, и
сумматор (25), выполненный с возможностью сложения изображения шума линии, умноженного на коэффициент α посредством блока умножения на коэффициент, с данными изображения текущего кадра и сохранения данных изображения после сложения в запоминающем устройстве.
6. Устройство по п.5, в котором средство (23) генерирования изображения шума выполнено с возможностью генерирования изображения шума линии путем понижения в заданном направлении изображения: разности, сгенерированного средством обработки разности.
7. Устройство по п.5, в котором средство (23) генерирования изображения шума выполнено с возможностью генерирования изображения шума линии путем осуществления одномерной сглаживающей фильтрации в заданном направлении для изображения разности, сгенерированного средством обработки разности.
8. Устройство по любому из пп.5-7, в котором средство (27) обработки разности включает в себя средство пороговой обработки, выполненное с возможностью осуществления пороговой обработки для каждого пикселя в изображении разности, и замены пикселя со значением, которое превышает заданное значение, нулем, или умножения этого пикселя со значением, которое превышает заданное значение, на коэффициент, который меньше, чем 1.
9. Способ обработки для устройства обработки информации, содержащий этапы, на которых:
осуществляют пространственную фильтрацию в диапазоне частот, основанном на пространственной частоте объекта, для данных изображения текущего кадра, и
осуществляют рекурсивную фильтрацию путем получения данных изображения, которые обработаны до текущего кадра, из запоминающего устройства, умножения полученных данных изображения на коэффициент α (α<1), сложения данных изображения, умноженных на коэффициент α, с данными изображения текущего кадра после пространственной фильтрации, и сохранения данных изображения после сложения в запоминающем устройстве.
10. Считываемый компьютером носитель информации, хранящий компьютерную программу, которая при ее исполнении вызовет выполнение компьютером способа по п.9.
11. Устройство обработки информации, которое осуществляет обработку рекурсивной фильтрации для определенного изображения кадра в движущемся изображении на основании другого изображения кадра в движущемся изображении, и которое получает обработанное изображение после обработки рекурсивной фильтрации, устройство содержит:
средство обработки разности, выполненное с возможностью генерирования изображения разности между изображением текущего кадра и обработанным изображением, хранимым в памяти;
средство отделения, выполненное с возможностью отделения шума изображения на основании изображения разности;
сумматор, выполненный с возможностью смешения текущего изображения кадра и изображения шума с определенным коэффициентом смешения;
средство хранения, выполненное с возможностью сохранения изображения, полученного посредством сумматора, как нового обработанного изображения, в памяти.
12. Устройство по п.11, в котором указанное средство отделения отделяет шум линии, бегущий в заданном направлении в изображении разности.
13. Устройство по п.12, в котором средство отделения отделяет шум линии посредством понижения изображения разности в заданном направлении.
14. Устройство по любому из пп.11-13, дополнительно содержащее:
средство пространственной фильтрации, выполненное с возможностью выполнения пространственной фильтрации для текущего изображения кадра на основании информации об объекте перед генерированием изображения разности, и
средство обработки понижения движения, выполненное с возможностью удаления информации о движении объекта в изображении разности, сгенерированном средством обработки разности после обработки пространственной фильтрацией,
при этом указанное средство отделения отделяет изображение шума от изображения в котором информация движения понижается.
15. Устройство по п.14, дополнительно содержащее другое средство пространственной фильтрации, выполненное с возможностью выполнения пространственной фильтрации на основании информации об изображении изображения, полученного сумматором, для изображения, полученного сумматором.
16. Устройство по п.14, дополнительно содержащее средство определения, выполненное с возможностью определения соотношения процессов между обработкой посредством пространственной фильтрации и обработкой посредством сумматора на основании, по меньшей мере, одного из информации движения и информации об объекте изображения текущего кадра,
при этом, по меньшей мере, один из параметра обработки пространственной фильтрации посредством средства пространственной фильтрации и определенного коэффициента смешения посредством сумматора изменяют на основании определенного соотношения процессов.
17. Устройство по п.11, дополнительно содержащее средство определения, выполненное с возможностью определения определенного коэффициента смешения на основании количества движения объекта в движущемся изображении.
18. Устройство по п.11, в котором средство обработки разности генерирует изображение разности между другим изображением кадра и новым обработанным изображением, хранимым в памяти.
19. Устройство обработки информации, которое понижает шум изображения кадра в движущемся изображении, использующее пространственный фильтр и рекурсивный фильтр, устройство содержит:
средство обработки пространственной фильтрации, выполненное с возможностью осуществления обработки понижения шума для текущего изображения кадра, использующее пространственный фильтр на основании информации об объекте, и
средство обработки рекурсивной фильтрации, выполненное с возможностью понижения шума текущего изображения кадра на основании информации о шуме, выделенном из различия изображения между текущим изображением кадра и обработанным изображением, к которому применялась обработка рекурсивной фильтрации.
20. Устройство по п.18, дополнительно содержащее средство определения, выполненное с возможностью определения соотношения процессов между обработкой пространственной фильтрации посредством средства пространственной фильтрации и обработкой рекурсивной фильтрации посредством средства рекурсивной фильтрации.
21. Способ обработки информации для устройства обработки информации, которое осуществляет обработку рекурсивной фильтрации для определенного изображения кадра в движущемся изображении на основании другого изображения кадра в движущемся изображении, и которое получает обработанное изображение после обработки рекурсивной фильтрации, способ содержит этапы, на которых:
генерируют изображение разности между изображением текущего кадра и обработанным изображением, хранимым в памяти;
отделяют шум изображения на основании изображения разности;
смешивают текущее изображения кадра и изображение шума путем сложения изображения шума и текущего изображения, используя определенный коэффициент смешения; и
сохраняют изображение, полученное посредством сумматора, как новое обработанное изображение, в памяти.
22. Способ обработки информации для устройства обработки информации, которое понижает шум изображения кадра в движущемся изображении, использующий пространственный фильтр и рекурсивный фильтр, способ содержит этапы, на которых:
осуществляют обработку понижения шума для текущего изображения кадра с использованием пространственного фильтра на основании информации об объекте, и
понижают шум текущего изображения кадра на основании информации о шуме, выделенном из различия изображения между текущим изображением кадра и обработанным изображением, к которому применялась обработка рекурсивной фильтрации.
| US 4847909 А, 11.07.1989 | |||
| Модуль для сдвига операндов | 1988 |
|
SU1617434A1 |
| EP 1267993 В1, 05.01.2005 | |||
| СИСТЕМА ДЛЯ МОДУЛИРОВАНИЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ В ЯЧЕИСТОЙ ТЕЛЕФОННОЙ СИСТЕМЕ С КОДОВЫМ РАЗДЕЛЕНИЕМ МНОЖЕСТВЕННОГО ДОСТУПА И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2125344C1 |
| УСТРОЙСТВО ДЛЯ СЖАТИЯ ПРЕДСТАВЛЯЮЩЕГО ИЗОБРАЖЕНИЕ ВИДЕОСИГНАЛА И УСТРОЙСТВО ДЛЯ ФИЛЬТРАЦИИ ШУМА В СИГНАЛЕ | 1996 |
|
RU2189700C2 |

