Изобретение относится к подвесной канатной дороге по меньшей мере с двумя станциями, а также по меньшей мере с одним несущим и подъемным канатом, проходящим на станциях через оборотные шкивы, по меньшей мере один из которых является приводным, и с транспортными средствами, такими как кабины подвесной канатной дороги или кресла, подцепляемыми к несущему и подъемному канату и отцепляемыми от него на станциях от несущего и подъемного каната и перемещаемыми через станции по направляющим рельсам, или с транспортными средствами, закрепленными на несущем и подъемном канате, причем на станциях предусмотрена возможность посадки в транспортные средства и высадки из них пассажиров.
Настоящее изобретение относится также к подвесной канатной дороге по меньшей мере с двумя станциями, по меньшей мере с одним прочно закрепленным несущим и перемещаемыми по нему между станциями посредством по меньшей мере одного тягового каната транспортными средствами, такими как кабины подвесной канатной дороги или кресла, причем на станциях предусмотрена возможность посадки на эти транспортные средства или высадки из них пассажиров.
При работе подвесных канатных дорог следует учитывать, что транспортные средства из-за наличия воздушных потоков подвержены поперечным колебаниям, величина которых зависит от направлений и скоростей воздушных потоков. Особое преимущество таких подвесных канатных дорог с двумя параллельно установленными несущими канатами состоит в том, что транспортные средства подвержены лишь незначительным колебаниям. В отличие от них на подвесных канатных дорогах только с одним несущим канатом при больших и очень больших скоростях ветра происходят настолько сильные колебания транспортных средств, что возникает опасность столкновения транспортных средств с производственными зданиями, опорами подвесной канатной дороги или с транспортными средствами, движущимися в противоположном направлении, вследствие чего возникает необходимость в уменьшении скорости транспортных средств и в остановке работы подвесной канатной дороги.
На известных на сегодняшний день подвесных канатных дорогах в должностные инструкции обслуживающего их персонала входит оценка величины колебаний транспортных средств на предмет наличия опасности столкновения и вынесение решения о необходимости уменьшения скорости движения транспортных средств или остановке работы подвесной канатной дороги. При этом следует учитывать, что визуальное наблюдение за всей подвесной канатной дорогой вследствие топографических факторов, как правило, является невозможным, и что, помимо этого, видимость зависит от климатических условий, поскольку, например, в снегопад или в туман они существенно ухудшены. Кроме того, следует учесть, что на протяжении трассы подвесной канатной дороги воздушные потоки могут существенно различаться, в результате чего значения скорости ветра на отдельных участках не являются показательными для всей подвесной канатной дороги.
Другими словами, аэрогидродинамические условия вдоль подвесной канатной дороги могут существенно различаться, вследствие чего колебания транспортных средств на всем протяжении подвесной канатной дороги, а потому и вероятность столкновения могут быть также различны, и они трудно поддаются оценке при наблюдении со станций.
Из ЕР 1837264 А2 известен способ управления эксплуатацией подвесной канатной дороги, при котором с помощью сенсоров измеряют наклонное положение транспортных средств и при превышении предельных значений наклонного положения регулируется скорость несущего и подъемного каната. В этой известной канатной подвесной дороге не учитывается, однако, что наклонные положения транспортных средств имеют значение и в зависимости от удаления от опор, соответственно, удаления от станций, в частности, должны предотвращаться столкновения с опорами и, соответственно, с сооружениями станций.
В US 3 348 499 А раскрыта подвесная канатная дорога, имеющая стационарное устройство для определения амплитуды колебательных движений.
Из JP 63279962 известна подвесная канатная дорога, в которой вычислительным путем определяется удаление транспортного средства от станции и измеряется ее наклонное положение. Однако, с одной стороны, вычисление положения транспортных средств является затратным и требует, с другой стороны, дополнительных контролирующих устройств.
Поэтому в основу изобретения положена задача принятия мер по устранению указанных недостатков, известных на сегодняшний день подвесных канатных дорог.
Задача решается за счет того, что на участке подвесной канатной дороги для транспортных средств вдоль трассы подвесной канатной дороги предусмотрено, по меньшей мере, одно устройство для определения удаления от него транспортных средств, с одной стороны, и величины поперечных колебаний транспортных средств относительно направления их движения, с другой стороны, причем полученное значение амплитуды этих поперечных колебаний, возникающих на заданном расстоянии транспортного средства от данного устройства, используется для управления приводом подвесной канатной дороги.
Причем предусмотренное для транспортных средств, движущихся вдоль трассы, по меньшей мере одно устройство представляет собой сенсор, в частности лазерный сканер или, соответственно, электронную камеру.
В частности, на станциях предусмотрен сенсор, регистрирующий колебания приближающегося транспортного средства.
Предпочтительно, чтобы для управления приводом использовалась та измеренная величина колебаний, которая отмечается тогда, когда транспортное средство при подъезде к станции находится на расстоянии примерно 20-30 м от нее. Предпочтительно, чтобы при превышении заданного значения измеряемой величины колебаний подвесная канатная дорога отключалась. В качестве альтернативы привод подвесной канатной дороги может управляться таким образом, чтобы при превышении первого заданного значения измеряемой величины колебаний скорость движения транспортных средств уменьшалась, а при превышении второго заданного значения измеряемой величины привод подвесной канатной дороги отключался. Кроме того, при нарастании колебаний привод подвесной канатной дороги может управляться таким образом, чтобы скорость движения транспортных средств уменьшалась.
Ниже изобретение поясняется описанием варианта его осуществления со ссылками на прилагаемый чертеж.
Фиг.1 изображает в аксонометрии станцию подвесной канатной дороги, оборудованную сенсором, с помощью которого регистрируются величины колебаний транспортных средств, въезжающих на эту станцию.
На фиг.1 изображена станция подвесной канатной дороги. На этой подвесной канатной дороге имеется несущий и подъемный канат 1, проходящий на станциях через оборотные шкивы 2, причем один из этих оборотных шкивов 2 является приводным. К несущему и подъемному канату 1 вдоль трассы подвесной канатной дороги подцеплено произвольное число кабин 3 подвесной канатной дороги, которые на станциях отцепляются от несущего и подъемного каната 1, а затем с помощью тяговых колесных бандажей 4 проходят станцию по направляющим рельсам 5 со значительно меньшей скоростью по сравнению со скоростью несущего и подъемного каната 1, где пассажиры садятся в них или выходят из них. Скорость движения кабин 3 подвесной канатной дороги вдоль трассы составляет, например, 6 м/сек, в то время как скорость движения на участках входа или выхода составляет около 0,15-0,35 м/сек. Кроме того, станция может быть оборудована крышей 6.
Как показано на фиг.1, кабины 3 подвесной канатной дороги из-за больших скоростей ветра сильно раскачиваются в направлении, поперечном направлению А движения, что требует либо остановки работы подвесной канатной дороги, либо, во всяком случае, снижения скорости движения, поскольку существует опасность столкновения.
Для регистрации амплитуды колебаний тех кабин 3 подвесной канатной дороги, которые въезжают на станцию, на участке станции предусмотрен сенсор 7, с помощью которого, с одной стороны, регистрируется удаление соответствующей кабины 3 подвесной канатной дороги от этого сенсора, а с другой, величина колебаний этой кабины 3 подвесной канатной дороги в направлении, поперечном направлению движения. Сенсор 7, в частности, представляет собой лазерный сканер.
Сенсор 7 регистрирует величину колебаний соответствующей кабины 3 подвесной канатной дороги на заданном расстояния В этой кабины 3 подвесной канатной дороги от въезда на станцию. Как только эта величина превысит заданное значение, подвесная канатная дорога отключается. Согласно одному из вариантов осуществления в этом случае, как только величина колебаний превысит первое заданное значение, привод подвесной канатной дороги начинает управляться в сторону уменьшения скорости движения кабин 3 подвесной канатной дороги. Если же величина колебаний превысит второе заданное значение, то работа подвесной канатной дороги останавливается.
Чтобы дополнительно регистрировать также колебания кабин 3 подвесной канатной дороги, расположенных вдоль трассы подвесной канатной дороги, предпочтительно предусмотреть вдоль этой трассы дополнительные сенсоры, в частности лазерные сканеры, устанавливаемые, например, на опорах подвесной канатной дороги, и с помощью которых могут регистрироваться колебания кабин подвесной канатной дороги, движущихся в направлении этих датчиков или от них. Выходные сигналы сенсоров подаются на устройство управления, с помощью которого на основе зафиксированных колебаний кабин подвесной канатной дороги осуществляется необходимое управление приводом подвесной канатной дороги.
Вместо лазерных сканеров могут быть предусмотрены и другие виды сенсоров, например электронные камеры.
Такие сенсоры могут быть предусмотрены на подвесных канатных дорогах с подцепляемыми транспортными средствами, на подвесных канатных дорогах с транспортными средствами, прочно присоединяемыми к подъемному канату с помощью зажимов, а также на таких подвесных канатных дорогах, на которых транспортные средства перемещаются вдоль несущих канатов с помощью тяговых канатов.
Таким образом, предложены подвесные канатные дороги, в которых обеспечивается регистрация колебаний транспортных средств независимо от тех или иных условий видимости и управления работой подвесных канатных дорог в зависимости от тех или иных аэрогидродинамических условий на трассе подвесных канатных дорог.
Изобретение относится к подвесной канатной дороге. Подвесная канатная дорога выполнена по меньшей мере с двумя станциями, а также по меньшей мере с одним несущим, по меньшей мере с одним подъемным канатом (1), проходящим на станциях через оборотные шкивы (2), из которых по меньшей мере один является приводным, и с транспортными средствами (3), такими как кабины подвесной канатной дороги или кресла, в которые пассажиры садятся или выходят из них. При этом транспортным средствам (3) на трассе подвесной канатной дороги предоставляется по меньшей мере одно устройство (7), с помощью которого могут регистрироваться поперечные колебания транспортных средств (3) относительно направления их движения, а выходные сигналы которого передаются на устройство управления приводом подвесной канатной дороги, благодаря чему привод управляется в зависимости от размаха колебательных движений. Кроме того, устройство (7) определяет приближение к нему и удаление от него транспортных средств (3). В результате повышается безопасность подвесной канатной дороги. 2 н. и 12 з.п. ф-лы, 1 ил.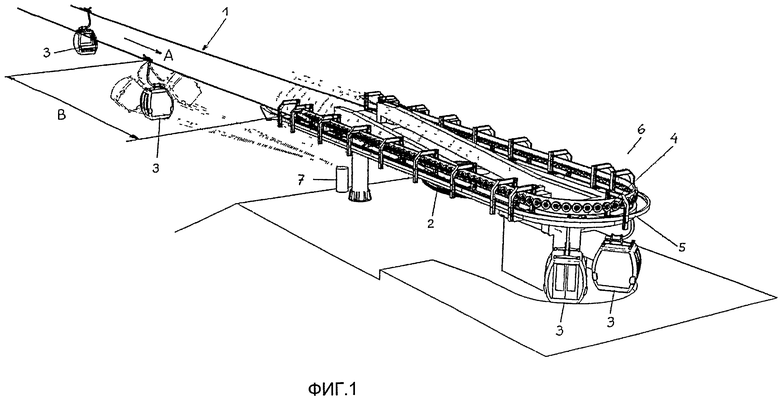
1. Подвесная канатная дорога, по меньшей мере, с двумя станциями, а также, по меньшей мере, с одним несущим и подъемным канатом (1), проходящим на станциях через оборотные шкивы (2), по меньшей мере, один из которых является приводным, и с транспортными средствами (3), такими как кабины подвесной канатной дороги или кресла, подцепляемыми к несущему и подъемному канату (1) и отцепляемыми на станциях от несущего и подъемного каната (1) и перемещаемыми через станции по направляющим рельсам (5), или с транспортными средствами (3), закрепленными на несущем и подъемном канате (1), причем на станциях предусмотрена возможность посадки в транспортные средства (3) и высадки из них пассажиров, причем для транспортных средств (3) вдоль трассы подвесной канатной дороги предусмотрено, по меньшей мере, одно устройство (7) для определения удаления от него транспортных средств (3), с одной стороны, и величины поперечных колебаний транспортных средств (3) относительно направления их движения, с другой стороны, причем полученное значение амплитуды этих поперечных колебаний, возникающих на заданном расстоянии транспортного средства (3) от данного устройства (7), используется для управления приводом подвесной канатной дороги.
2. Подвесная канатная дорога по п.1, отличающаяся тем, что одно из установленных вдоль трассы устройств (7) представляет собой сенсор, в частности лазерный сканер или, соответственно, электронную камеру.
3. Подвесная канатная дорога по п.1, отличающаяся тем, что, по меньшей мере, один сенсор (7) предусмотрен на станциях для регистрации колебаний приближающегося транспортного средства (3).
4. Подвесная канатная дорога по п.1, отличающаяся тем, что для управления приводом используют величину колебаний транспортного средства (3), возникающих при его приближении к станции на расстояние примерно в 20-30 м.
5. Подвесная канатная дорога по п.1, отличающаяся тем, что при превышении заданного значения измеряемой величины колебаний подвесная канатная дорога отключается.
6. Подвесная канатная дорога по п.1, отличающаяся тем, что управление приводом подвесной канатной дороги осуществляется таким образом, что при превышении первого заданного значения измеряемой величины колебаний скорость движения транспортных средств (3) уменьшается, а при превышении второго заданного значения измеряемой величины привод подвесной канатной дороги отключается.
7. Подвесная канатная дорога по п.1, отличающаяся тем, что при нарастании колебаний управление приводом подвесной канатной дороги осуществляется таким образом, что скорость движения транспортных средств (3) уменьшается.
8. Подвесная канатная дорога, по меньшей мере, с двумя станциями, по меньшей мере, одним прочно закрепленным несущим канатом и перемещаемыми по нему между станциями посредством, по меньшей мере, одного тягового каната транспортными средствами (3), такими как кабины подвесной канатной дороги или кресла, причем на станциях предусмотрена возможность посадки на эти транспортные средства (3) или высадки из них пассажиров, причем для указанных транспортных средств (3) вдоль трассы подвесной канатной дороги предусмотрено, по меньшей мере, одно устройство (7) для определения удаления от него транспортных средств (3), с одной стороны, и величины поперечных колебаний транспортных средств (3) относительно направления их движения, с другой стороны, причем полученное значение амплитуды этих поперечных колебаний, возникающих на заданном расстоянии транспортного средства (3) от данного устройства, используется для управления приводом подвесной канатной дороги.
9. Подвесная канатная дорога по п.8, отличающаяся тем, что одно из установленных вдоль трассы устройств (7) представляет собой сенсор, в частности лазерный сканер или, соответственно, электронную камеру.
10. Подвесная канатная дорога по п.8, отличающаяся тем, что, по меньшей мере, один сенсор (7) предусмотрен на станциях для регистрации колебаний приближающегося транспортного средства (3).
11. Подвесная канатная дорога по п.8, отличающаяся тем, что для управления приводом используют величину колебаний транспортного средства (3), возникающих при его приближении к станции на расстояние примерно в 20-30 м.
12. Подвесная канатная дорога по п.8, отличающаяся тем, что при превышении заданного значения измеряемой величины колебаний подвесная канатная дорога отключается.
13. Подвесная канатная дорога по п.8, отличающаяся тем, что управление приводом подвесной канатной дороги осуществляется таким образом, что при превышении первого заданного значения измеряемой величины колебаний скорость движения транспортных средств (3) уменьшается, а при превышении второго заданного значения измеряемой величины привод подвесной канатной дороги отключается.
14. Подвесная канатная дорога по п.8, отличающаяся тем, что при нарастании колебаний управление приводом подвесной канатной дороги осуществляется таким образом, что скорость движения транспортных средств (3) уменьшается.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| RU 2006147212 A, 10.07.2008 | |||
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2000 |
|
RU2184665C2 |
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |
| УСТАНОВКА ДЛЯ ПЕРЕМЕЩЕНИЯ ЛЮДЕЙ ОТ ВЕРХНЕЙ КОНЦЕВОЙ СТАНЦИИ КАНАТНОЙ ДОРОГИ К НИЖНЕЙ КОНЦЕВОЙ СТАНЦИИ КАНАТНОЙ ДОРОГИ | 1999 |
|
RU2237770C2 |

