Уровень техники
Изобретение относится к транспортировке по подвесной канатной дороге, в частности к транспортировке людей в вагонах канатных дорог.
Уровень техники
Разные типы установок для транспортировки по подвесной канатной дороге существуют в настоящее время. Например, установки, в которых используется тяговый канат, расположенный на уровне земли, такие как фуникулеры, движущиеся по рельсовым путям. В других установках используются один или больше воздушных тяговых канатов для вагонов канатной дороги, которые представляют собой транспортные установки для перемещения одного или больше пассажирских вагонов, также называемых кабинами, тележками, креслами и т.д. Некоторые вагоны подвесной канатной дороги называются отсоединяемыми, то есть, в вагонах, разработанных с возможностью соединения с воздушным тяговым канатом, предусмотрен отсоединяемый зажим, который обеспечивает для них возможность отсоединения от каната, в частности, когда они прибывают в терминал установки. Кроме того, в этих вагонах канатной дороги, разработанных для транспортировки пассажиров, предпочтительно, предусмотреть средство для улучшения комфорта пассажиров во время их транспортировки. В частности, когда вагоны перемещаются вдоль опоры, может происходить рывок, в частности, из-за изменения направления каната, которое модифицирует напряжение, приложенное к последнему, что может вызвать дискомфорт для пассажиров. Кроме того, такие установки представляют собой потребители электроэнергии, и существует требование предусматривать средство для экономии электрической энергии, потребляемой такими установками.
Сущность изобретения
Одна цель изобретения состоит в том, чтобы предусмотреть средство улучшения комфорта пассажиров вагонов во время их транспортировки.
Другая цель изобретения состоит в том, чтобы уменьшить потребление энергии транспортной установкой на основе подвесной канатной дороги.
В соответствии с одним аспектом изобретения, предложена транспортная установка на основе подвесной канатной дороги, содержащая:
- по меньшей мере, два вагона, в каждом из которых предусмотрен отсоединяемый зажим, для отсоединения вагона от и соединения вагона с воздушным тяговым канатом;
- по меньшей мере, одно соединительное устройство вагонов с воздушным тяговым канатом; и
- по меньшей мере, одну опору изгиба воздушного тягового каната.
Установка дополнительно содержит:
- средство детектирования, предназначенное для детектирования перемещения первого вагона, соединенного с воздушным тяговым канатом над упомянутой опорой, средство детектирования, выполненное с возможностью передачи, по меньшей мере, одного сигнала соединения, когда детектируется такое перемещение; и
- средство управления упомянутого соединительного устройства, соединенное со средством детектирования, и выполненное с возможностью подачи команды на соединение, по меньшей мере, второго вагона с воздушным тяговым канатом при приеме упомянутого сигнала соединения.
Рывок, возникающий в тяговом канате, который происходит, когда вагон на линии перемещается через изгибающую опору воздушного тягового каната, таким образом, уменьшается. Изгибающая опора воздушного тягового каната может представлять собой несущую опору для изгиба каната в направлении снижения, или прижимающую опору для изгиба каната в направлении подъема, или, с другой стороны, несущую - прижимающую опору, которая действует как несущая опора или прижимающая опора. Когда вагон перемещается через опору, общее напряжение, генерируемое в канате, фактически изменяется, в результате чего происходит рывок в канате. Для уменьшения рывка, один или больше из других вагонов соединяют с воздушным тяговым канатом для противодействия изменению общего напряжения в канате, либо путем увеличения напряжения, когда последнее проявляет тенденцию к уменьшению, или наоборот. Благодаря соединению, по меньшей мере, одного вагона в терминале, когда другой вагон, соединенный с канатом, перемещается через опору, крутящий момент, обеспечиваемый двигателем привода, сглаживается для ограничения рывка и уменьшения энергии, потребляемой двигателем. Рывок двигателя, таким образом, может быть уменьшен в разных конфигурациях транспортных установок, в частности, тех, которые имеют одну несущую опору или одну прижимающую опору. Предпочтительно, необходимая мощность двигателя привода уменьшается. Таким образом, можно предусмотреть использование одного двигателя привода, имеющего меньшие размеры. В соответствии с другим преимуществом, сила торможения тягового каната уменьшается, и менее мощный тормоз можно использовать для двигателя привода и для поворотного круга. В соответствии с другим преимуществом, необходимая мощность двигателя привода уменьшается, и можно рассматривать возможность использования инерции вала более слабого двигателя.
Средство детектирования может содержать датчик положения, выполненный с возможностью детектирования прохода упомянутой опоры первым вагоном, соединенным с воздушной канатной дорогой, и для передачи сигнала соединения в средство управления, когда детектируется проход упомянутой опоры.
Средство детектирования может дополнительно содержать вычислительный модуль, выполненный с возможностью расчета времени, когда первый вагон перемещается через упомянутую опору, и передачи сигнала соединения в средство управления, когда достигается расчетное время.
Установка может содержать двигатель привода подвесной канатной дороги, и средство детектирования может содержать модуль для определения крутящего момента, подаваемого двигателем привода, и для передачи сигнала соединения в средство управления, когда абсолютное значение степени вариации крутящего момента, прикладываемого двигателем привода, выше, чем установленное пороговое значение.
В частности, когда вагон перемещают из точки, расположенной внизу, в точку, расположенную выше, когда вагон перемещается через несущую опору, он затем перемещается от верхней точки в нижнюю точку, и вагон облегчает приведение каната в движение, что приводит к рывку двигателя. Когда вагон перемещается через несущую опору, степень изменения крутящего момента становится выше, чем установленное пороговое значение, и другой вагон присоединяют, чтобы снова увеличить крутящий момент двигателя, сглаживая, таким образом, крутящий момент, прикладываемый двигателем привода к канату. Используя управляемое соединение вагонов в терминале, крутящий момент двигателя, прикладываемый двигателем, может быть сглажен, что повышает комфорт пассажиров и снижает потребление энергии двигателя привода поворотного круга. То, что подразумевается под степенью вариации, представляет собой абсолютное значение вариации, которое либо увеличивается, либо уменьшается, крутящего момента двигателя, прикладываемого двигателем привода, разделенное на длительность.
Модуль может содержать средство для измерения тока, потребляемого двигателем привода, и для определения крутящего момента, подаваемого двигателем привода, по измеренному потребляемому току.
Упомянутая опора может представлять собой несущую опору для изгиба подвесной канатной дороги в направлении снижения, и средство детектирования может передавать сигнал соединения в средство управления, когда степень уменьшения крутящего момента, подаваемого двигателем привода, выше, чем установленное пороговое значение.
Установка может содержать, по меньшей мере, одну прижимающую опору, предназначенную для изгиба каната в направлении подъема, и средство детектирования передает сигнал соединения в средство управления, когда степень увеличения крутящего момента, подаваемого двигателем привода, выше, чем установленное пороговое значение.
Когда установка содержит прижимающую опору, вагон перемещается из точки, находящейся вверху, в точку, находящуюся внизу, затем, когда вагон перемещается через прижимающую опору, его затем перемещают из точки, находящейся внизу, в точку, находящуюся вверху, и вагон замедляет привод каната, что приводит к рывку двигателя. Когда вагон перемещается через опору, крутящий момент увеличивается, и при этом степень увеличения крутящего момента выше, чем установленное пороговое значение, и другой вагон присоединяют чтобы снова уменьшить крутящий момент двигателя и для сглаживания крутящего момента, прикладываемого двигателем привода к канату.
Для случая несущей-прижимающей опоры случай несущей опоры является соответствующим, если вагон перемещают из нижней точки в верхнюю точку перед проходом через опору и затем из верхней точки в нижнюю точку после этого прохода. Случай прижимающей опоры относится к случаю, когда вагон перемещается из верхней точки в нижнюю точку перед проходом через опору, и затем из нижней точки в верхнюю точку после такого прохода.
Средство управления может передавать команды в упомянутое средство соединения для соединения вагонов с переменной частотой соединения.
Такая установка, в частности, пригодна для соединения вагонов в соответствии с требованиями, и, более конкретно, когда величина вибрации крутящего момента, прикладываемого двигателем, превышает пороговое значение с переменной частотой.
Установка может содержать, по меньшей мере, две станции, каждая из которых оборудована соединительным устройством вагонов для подвесной канатной дороги, и средство управления передает команду в соединительное устройство терминала соединить вагон с подвесной канатной дорогой с другой частотой соединения, чем частота соединения соединительного устройства, по меньшей мере, одной другой станции.
Рывок, генерируемый в канате, таким образом, сглаживается в результате синхронизации ритма соединения вагонов с перемещением через опору, что не проявляется в случае установок, которые имеют идентичный ритм движения между разными терминалами и не позволяют уменьшать рывки, генерируемые в канате.
В соответствии с другим аспектом изобретения, предложен способ для транспортировки по подвесной канатной дороге, по меньшей мере, двух вагонов, каждый из которых оборудован отсоединяемым зажимом, который предназначен для отсоединения от и соединения с подвесной канатной дорогой, при этом подвесная канатная дорога изгибается, по меньшей мере, одной опорой.
Способ содержит следующие этапы, на которых:
- детектируют перемещение первого вагона, соединенного с подвесной канатной дорогой, через упомянутую опору; и
- соединяют, по меньшей мере, второй вагон с подвесной канатной дорогой, когда детектируют перемещение.
Этап детектирования может содержать расчет времени, когда первый вагон перемещается над упомянутой опорой, и этап соединения содержит соединение, по меньшей мере, второго вагона с подвесной канатной дорогой, когда достигается расчетное время.
Подвесная канатная дорога может приводиться в движение двигателем, этап детектирования содержит определение крутящего момента, поддерживаемого двигателем, и этап соединения содержит соединение, по меньшей мере, второго вагона с подвесной канатной дорогой, когда абсолютное значение степени вариации крутящего момента, прикладываемого двигателем, превышает установленное пороговое значение.
Подвесная канатная дорога может изгибаться в направлении снижения, по меньшей мере, одной несущей опорой, и этап соединения может содержать соединение, по меньшей мере, второго вагона с подвесной канатной дорогой, когда степень снижения крутящего момента, прикладываемого двигателем, выше, чем установленное пороговое значение.
Подвесная канатная дорога может изгибаться в направлении подъема, по меньшей мере, одной прижимающей опорой, и на этапе соединения соединяют, по меньшей мере, второй вагон с подвесной канатной дорогой, когда степень увеличения крутящего момента, прикладываемого двигателем, выше, чем установленное пороговое значение.
Этап соединения также может содержать соединение вагонов с переменной частотой соединения.
Способ может содержать, по меньшей мере, две станции, выполненные с возможностью соединения вагонов с подвесной канатной дорогой, и этап соединения может содержать соединение вагонов, по меньшей мере, на одной станции с другой частотой соединения, чем частота, по меньшей мере, одной другой станции.
Краткое описание чертежей
Другие преимущества и свойства будут более понятными из следующего описания конкретных вариантов осуществления изобретения, приведенных только с целью неограничительного примера, и представленных на приложенных чертежах, на которых:
- на фиг. 1 схематично иллюстрируется вариант осуществления транспортной установки с использованием подвесной канатной дороги, в соответствии с изобретением;
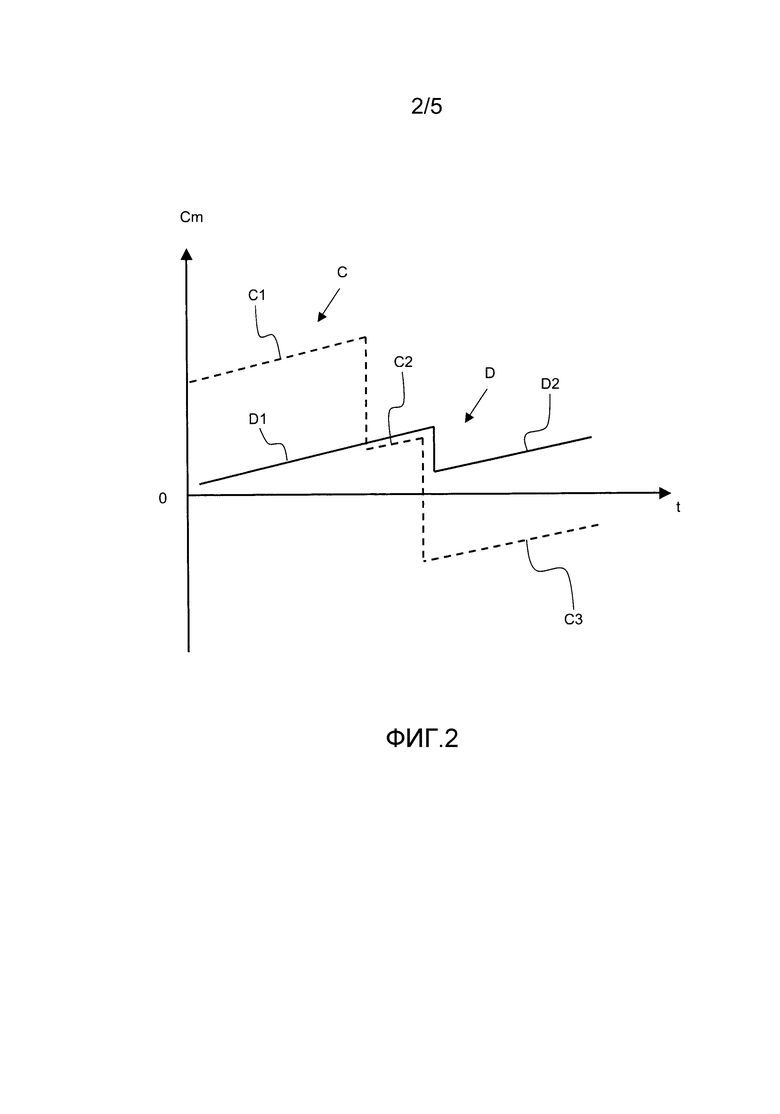
- на фиг. 2 схематично иллюстрируются графики крутящего момента, прикладываемого двигателем привода к канату, в зависимости от времени; и
- на фиг. 3-5 схематично иллюстрируются другие варианты осуществления транспортной установки с использованием подвесной канатной дороги.
Подробное описание изобретения
На фиг. 1 представлена транспортная установка 1 с использованием подвесной канатной дороги 2, содержащая, по меньшей мере, два вагона 3-5. В примере, показанном на фиг. 1, установка содержит три вагона 3-5. Вагоны 3-5 выполнены с возможностью их соединения с канатом 2, и перемещаются последним. Транспортная установка 1, в общем, представляет собой вагончик подвесной канатной дороги. Более конкретно, установка 1 может представлять собой лифт с кабиной, и в этом случае, вагоны закрыты, или она может представлять собой подъемник с сиденьями, где вагоны открыты. Установка 1 содержит, по меньшей мере, две конечных станции, называемые терминалами 6, 7, предназначенные для загрузки и выгрузки людей. В примерах, представленных на фиг. 1 и 5, установка 1 содержит два терминала 6, 7, расположенные на одном уровне, то есть, на одной и той же горизонтальной линии. В качестве варианта, первый терминал 6 расположен вверху и называется верхним терминалом, и второй терминал 7 расположен внизу и называется нижним терминалом, как представлено на фиг. 3 и 4. Транспортная установка 1 может дополнительно содержать одну или больше промежуточных станций 8, расположенных между двумя терминалами 6, 7, как представлено на фиг. 4. Обычно транспортную установку 1 называют отсоединяемой, то есть, каждый вагон 3-5, содержит зажим отсоединения, который позволяет соединять вагоны 3-5 с подвесной канатной дорогой 2 и отсоединять их от нее. Установка 1 может дополнительно содержать другие канаты, называемые несущими канатами, для поддержки вагонов 3-5 над уровнем земли. Установка 1 также может содержать другие тяговые канаты, когда вагоны являются большими и тяжелыми. Эти разные канаты не были представлены на чертежах для упрощения. В любом случае, установка 1 содержит, по меньшей мере, один тяговый канат 2, который может представлять собой или может не представлять собой несущий канат для перемещения вагонов 3-5 путем приложения тяги от одного терминала 6 к другому терминалу 7, 8 и наоборот. Тяговый канат 2 представляет собой непрерывный канат в виде замкнутой петли, приводимый в движение поворотным кругом 9, который, в свою очередь, приводится в движение от двигателя 10 одного из терминалов 6, также называемого терминалом 6 привода. Другой терминал 7 в своей части содержит не моторизованный поворотный круг 11, называемый возвратным поворотным кругом, предназначенным для натяжения тягового каната 2 между терминалами 6, 7.
Кроме того, когда вагон 3-5 выходит из станции 6 и направляется к станции 8, он соединено с канатом 2, который переносит его к другой станции, одному из конечных терминалов 6, 7 или промежуточной станции 8. В этом случае, отсоединяемый зажим закрыт, и вагон закреплен на канате 2, то есть, он постоянно механически соединен с канатом 2. Между двумя станциями вагоны движутся вдоль дорожки движения, определяемой тяговым канатом 2, вагоны также называются установленными в линию. Когда вагон 3-5 достигает станции 6-8, зажим вагона разъединяется, и вагон 3-5 отсоединяется от тягового каната 2. Отсоединенный вагон может быть остановлен, или может двигаться по контуру 12 передачи станции 6-8 с более медленной скоростью, чем скорость тягового каната 2. Каждый контур 12 передачи содержит блок 13 замедления, блок 14 ускорения и промежуточный блок 15, который соединяет первые два блока 13, 14. Более конкретно, каждый терминал 6, 7 содержит один контур 12 передачи, и промежуточные станции 8 могут содержать два контура 12a, 12b передачи.
Каждая секция 13-15 содержит набор колес 16 с пневматическими шинами, расположенными вдоль секции 13-15. Колеса 16 взаимодействуют посредством трения с фрикционными пластинами, установленными на зажимах вагонов 3-5, для перемещения отсоединенных вагонов в контуре 12 передачи каждой из станций 6-8.
Каждая станция 6-8 содержит соединительное устройство 17, для соединения вагона с подвесной канатной дорогой 2, и устройство 18 отсоединения, предназначенное для отсоединения вагона. Устройство 18 отсоединения содержит секцию 13 замедления и механизм 19 раскрытия зажима, предназначенный для раскрытия зажима вагона, поступающего на станцию, который отсоединяет его от каната 2. Механизм 19 раскрытия расположен в начале секции 13 замедления, то есть, в месте, где вагоны поступают на станцию. Механизм 19 раскрытия содержит рельсу, которая обеспечивает сжатие пружины зажима, чтобы раскрыть его и поддерживать зажим открытым во время управления вагона в контуре 12, 12a, 12b передачи. Затем вагон достигает промежуточной секции 15, где он останавливается, или может двигаться с малой скоростью, со скоростью меньше, чем скорость с которой он двигался в секции 13 замедления.
Кроме того, каждое соединительное устройство 17 содержит промежуточную секцию 15, секцию 14 ускорения и устройство 20 запуска. Устройство 20 запуска содержит двигатель 21 пускового привода и двигатель 22 ускорения. Двигатель 21 пускового привода приводит во вращение набор колес 16 промежуточной секции 15 для перемещения отсоединенных вагонов из промежуточной секции 15 в секцию 14 ускорения. Например, двигатель 21 пускового привода осуществляет привод приводного ремня колес 16 промежуточной секции 15. В качестве варианта, двигатель 21 пускового привода приводит в движение цепь с распорками, для прижима к вагонам и проталкивания их из одного местоположения в другое. Двигатель 22 ускорения, со своей стороны, обеспечивает ускорение отсоединенных вагонов вдоль секции 14 ускорения до скорости, равной скорости тягового каната 2, для соединения вагона без рывка. Например, двигатель 22 ускорения приводит в движение колеса 16 секции 14 ускорения посредством ремня для ускорения отсоединенных вагонов. Когда вагоны выходят из секции 14 ускорения, зажим выходит из рельса, и пружина снова сжимается, закрывая зажим на тяговом канате 2, соединяя, таким образом, вагон с канатом 2. Двигатели 21, 22 пускового привода и ускорения могут представлять собой двигатель с переменной скоростью или с постоянной скоростью. Предпочтительно, двигатели 21, 22 представляют собой двигатели с постоянной скоростью.
Установка 1 также содержит, по меньшей мере, одну несущую опору 23 подвесной канатной дороги 2. Другими словами, несущие опоры 23 изгибают подвесную канатную дорогу 2 в направлении земли, например, таким образом, что подвесная канатная дорога 2 следует контуру земли. Это означает, что несущие опоры 23 изгибают подвесную канатную дорогу 2 в направлении снижения. Обычно, несущие опоры 23 расположены между двумя терминалами 6-8. Установка 1 может дополнительно содержать, по меньшей мере, одну прижимающую опору 24, которая изгибает канат 2 в направлении подъема, как представлено на фиг. 5. Как вариант, установка 1 может содержать одну или больше несущих - прижимающих опор.
Установка 1 может дополнительно содержать средства 25-27 детектирования 25 перемещения опоры, несущую опору 23 и/или прижимающую опору 24, и/или несущую-прижимающую опору (не представлена для простоты), вагон, соединенный с подвесной канатной дорогой 2, и средство 28 управления выполненное с возможностью управления соединительными устройствами 17 терминалов 6-8.
Средство 25-27 детектирования выполнено с возможностью передачи, по меньшей мере, одного сигнала соединения в средство 28 управления через соединения 29-31, которые могут быть кабельными или нет, например, сигнал может быть передан на радиоволнах определенной частоты. Сигнал соединения передают с помощью средства 25, 26 детектирования, когда детектируется перемещение через опоры 23, 24 установки 1 вагона, соединенного с подвесной канатной дорогой 2. Например, средство детектирования содержит датчик 25 положения, выполненный с возможностью детектирования перемещения через опоры 23, 24 вагоном, соединенным с подвесной канатной дорогой 2. Датчик 25 положения передает сигнал соединения со средством 28 управления через соединение 31, когда детектируется перемещение опоры. Предпочтительно, на каждой опоре 23, 24 установки установлен датчик 25 положения. Датчики 25 положения, например, установлены на их соответствующих опорах 23, 24. В соответствии с вариантом, средство детектирования содержит модуль 26, выполненный с возможностью определения крутящего момента, прикладываемого двигателем 10 привода. Кроме того, модуль 26 передает сигнал соединения в средство 28 управления через соединение 30, когда абсолютное значение степени вариации крутящего момента, прикладываемого двигателем 10 привода, выше, чем установленное пороговое значение. Установленное пороговое значение зависит от конфигурации установки 1. Например, установленное пороговое значение выше, чем степень вариации крутящего момента двигателя, когда один или больше вагонов перемещаются между станцией и опорой, или между двумя опорами, и в направлении подъема, или в направлении снижения. Детектирование степени изменения крутящего момента, прикладываемого двигателем 10 привода, когда она выше, чем установленное пороговое значение, соответствует перемещению вагона через опору. Когда вагон перемещается через несущую опору 23, вагон фактически перемещается из точки вершины (вершины опоры) в точку снижения (положение, расположенное после опоры в направлении перемещения каната 2), что предоставляет энергию в двигатель 10 привода, поскольку вагон облегчает привод каната. Более конкретно, перед перемещением через несущую опору 23 двигатель привода увеличивает прикладываемый крутящий момент со степенью вариации, меньшей, чем установленное пороговое значение для перемещения вагона из точки, расположенной внизу, к вершине несущей опоры 23. Затем, когда вагон перемещается через опору, крутящий момент уменьшается, и, после перемещения вагона, крутящий момент дополнительно уменьшается так, что степень уменьшения прикладываемого крутящего момента выше, чем установленное пороговое значение. В любом случае, крутящий момент двигателя уменьшается при перемещении несущей опоры 23 в случае, когда вагон, соединенный с канатом, движется от или в направлении терминала 6 привода. Таким образом, когда детектируют перемещение через несущую опору 23, соединяют вагон, который будет перемещаться в направлении несущей опоры 23 и который будет замедлять привод в движение каната, что ограничивает рывок и уменьшает потребление энергии двигателем 10.
Кроме того, когда вагон перемещается через прижимающую опору 24, вагон перемещается от точки, расположенной внизу (вершина опоры), к точке, расположенной вверху (положение, расположенное после опоры в направлении перемещения каната 2), и двигатель 10 привода должен увеличить прикладываемый крутящий момент для перемещения вагона вверх до точки, расположенной выше, поскольку вагон замедляет привод каната. Более конкретно, перед перемещением через прижимающую опору 24, крутящий момент, прикладываемый двигателем 10, увеличивается со степенью вариации ниже, чем установленное пороговое значение, чтобы переместить вагон из точки, расположенной выше, к прижимающей опоре 24. Затем, когда вагон перемещается через опору 24, крутящий момент увеличивается, и, после перемещения вагона, крутящий момент снова увеличивается таким образом, что степень увеличения прикладываемого момента будет выше, чем установленное пороговое значение. В любом случае, крутящий момент двигателя увеличивается, при перемещении прижимающей опоры 24 в случае, когда вагон, соединенный с канатом, перемещается от или в направлении к терминалу 6 привода.
Для определения степени вариации крутящего момента двигателя, модуль 26 может определять энергию, потребляемую двигателем, или скорость каната, или ток, потребляемый двигателем 10. В частности, ток, потребляемый двигателем 10, представляет собой отображение прикладываемого крутящего момента. Предпочтительно, модуль 26 содержит средство для измерения тока, потребляемого двигателем 10 привода, и определяет крутящий момент, прикладываемый двигателем 10 привода, по измеренному потребляемому току.
В соответствии с еще одним, другим вариантом, средство детектирования содержит вычислительный модуль 27, выполненный с возможностью расчета времени, когда вагон пройдет через опоры 23, 24. Кроме того, вычислительный модуль 27 передает сигнал соединения средства 28 управления через соединение 29, когда достигается расчетное время. Например, вычислительный модуль 27 содержит датчики положения, расположенные на соединительных устройствах 17, для детектирования соединения вагона с подвесной канатной дорогой 2. Вычислительный модуль 27 дополнительно измеряет время перемещения, когда вагон соединен с подвесной канатной дорогой 2, измеряет скорость вращения поворотного круга с течением времени, и затем рассчитывает время, когда соединенный вагон пройдет через опору, по измеренной скорости и времени прохождения, и на основе расстояний между опорами и соединительными устройствами 17. Расстояние представляет собой данные, записанные заранее в энергонезависимом запоминающем устройстве вычислительного модуля 27.
Средство 25-27 детектирования может содержать датчики 25 положения, модуль 26 и вычислительный модуль 27 в комбинации.
Средство 28 управления соединено со средством детектирования через соединения 29-31 и выполнено с возможностью передачи команды на соединение вагона с подвесной канатной дорогой 2 при приеме, по меньшей мере, одного сигнала на соединение, передаваемого либо датчиком 25 положения, или модулем 26, или вычислительным модулем 27, или всеми ими тремя. Избыточность сигналов соединения обеспечивает возможность смягчения последствий отказа датчика 25 или модуля 26, или вычислительного модуля 27. Например, средство 28 управления может быть выполнено с возможностью инициирования соединения, если оно принимает, по меньшей мере, один сигнал соединения. Предпочтительно, средство 28 управления выполнено с возможностью инициирования соединения, если оно принимает, по меньшей мере, сигнал соединения, поступающий из вычислительного модуля 27. Средство 28 управления может представлять собой электронный модуль управления. Обычно средство 28 управления передает команду в соединительное устройство, когда вагон перемещается через опору, другими словами, когда средство 28 управления принимают сигнал соединения, поступающий из модуля 26, или из датчика 25 положения, или из вычислительного модуля 27, или из всех из них трех одновременно. Средство 28 управления соединено с соединительными устройствами 17 на станциях соединениями 32, которые могут быть соединены по проводам или нет, например, используя радиоволны на определенной частоте. Более конкретно, средство 28 управления передает команду в двигатель 20 пускового привода и в двигатель 21 ускорения. Когда средство 28 управления принимает сигнал соединения, оно передает команду в устройство 17 соединения, по меньшей мере, одной станции 6-8 - соединить отсоединенный вагон с подвесной канатной дорогой 2. Кроме того, средство 28 управления передает команду в двигатель 20 пускового привода - переместить отсоединенный вагон из промежуточного участка 15 в участок 14 ускорения. Затем двигатель 22 ускорения, который может выполнять постоянный привод колес 16 участка ускорения, ускоряет вагон для соединения его с канатом 2.
Общий рабочий принцип установки 1 состоит в том, чтобы детектировать перемещение первого вагона, соединенного с канатом через опору, и соединять, по меньшей мере, второй вагон с подвесной канатной дорогой при детектировании перемещения первого вагона через опору. На фиг. 1, в исходном состоянии, первый вагон 3 перемещается через несущую опору 23, второй вагон 4 соединен с канатом 2, и третий вагон 5 находится в неподвижном состоянии в конечном терминале 7. Когда второй вагон 4 соединен с подвесной канатной дорогой 2, он покидает свое положение неподвижного состояния на промежуточном участке 15, представленном пунктирными линиями, движется на участок 14 ускорения и затем соединяется с канатом 2. Затем осуществляют привод подвесной канатной дороги 2 в направлении S к другому терминалу 7. В этом случае, первый вагон 3 перемещают в направлении терминала 6 привода, со снижением от вершины несущей опоры 23 к терминалу 6 привода. Второй вагон 4 перемещается в направлении вершины несущей опоры 23. Затем первый вагон 3 отсоединяется и останавливается на промежуточном участке 15 терминала 6 привода, и второй вагон 4 перемещается через несущую опору 23 в направлении другого терминала 7. Средство 25-27 детектирования передает сигнал соединения со средством 28 управления, обозначающий, что второй вагон 4 переместился через несущую опору 23, и средство 28 управления передает команду в устройство 7 соединения терминала соединить третий вагон 5 с подвесной канатной дорогой 2. В конце цикла второй вагон 4 прибывает в терминал 7, где его отсоединяют для остановки на промежуточном участке 15 терминала 7. Кроме того, третий вагон 5 перемещается через несущую опору 23 в направлении терминала 6 привода, и средство 25, 26 детектирования передает новый сигнал перемещения, и средство 28 управления передает команду в устройство 17 соединения терминала 6 привода для соединения первого вагона 3 с подвесной канатной дорогой.
На фиг. 2 первая кривая C представлена в виде пунктирной линии, что соответствует крутящему моменту Сm, прикладываемому двигателем 10 привода, в зависимости от времени t, в случае, когда два вагона соединены в установке 1, описанной со ссылкой на фиг. 1, используя подход предшествующего уровня техники. Подход предшествующего уровня техники состоит в соединении вагонов, в которых учитывается постоянный временной интервал между соединением двух последовательных вагонов в каждом из терминалов для поддержания постоянного расстояния между вагонами, соединенными с канатом. На первом этапе, представленном первой частью C1 первой кривой C, два вагона соединяют одновременно в, соответственно, двух терминалах 6, 7. Затем вагоны перемещают одновременно в направлении верхней части несущей опоры, и крутящий момент двигателя увеличивается. На втором этапе, представленном второй частью C2 первой кривой C, первый вагон, соединенный с канатом, перемещается через опору, и крутящий момент резко уменьшается, приводя к рывку, затем снова увеличивается, из-за перемещения второго вагона в направлении вершины опоры. На третьем этапе, представленном третьей частью C3 первой кривой C, второй вагон перемещается через опору, крутящий момент снова резко уменьшается, приводя к рывку, и становится отрицательным с учетом того факта, что два вагона снижаются в направлении двух терминалов 6, 7, соответственно, и совместно усиливают привод подвесной канатной дороги.
И, наоборот, в соответствии с изобретением, крутящий момент, прикладываемый двигателем привода, сглаживается. Вторая кривая D представлена пунктирной линией, соответствующей крутящему моменту Сm, прикладываемому двигателем 10 привода, в зависимости от времени t, в случае, когда три вагона соединены в установке 1, описанной со ссылкой на фиг. 1, в соответствии с изобретением. В соответствии с изобретением, постоянный интервал времени между соединением двух последовательных вагонов в каждом из терминалов не обязательно соблюдается. Кроме того, изобретение состоит из соединения вагонов для ограничения рывка двигателя 10 привода. На первом этапе, представленном первой частью D1 второй кривой D, первый вагон, соединенный с канатом, перемещается через опору, и второй вагон, поэтому, соединен в терминале 6. Затем первый вагон перемещается в направлении терминала 6, и второй вагон перемещается в направлении вершины опоры, и крутящий момент двигателя увеличивается. При этом степень изменения крутящего момента ниже, чем установленное пороговое значение. На втором этапе, представленном второй частью D2 второй кривой D, второй вагон, соединенный с канатом, перемещается через опору, и крутящий момент резко уменьшается, вызывая новый рывок. При этом степень изменения крутящего момента выше, чем установленное пороговое значение.
На втором этапе третий вагон соединяют в одном из терминалов, предпочтительно, в другом терминале 7, и крутящий момент затем увеличивается для перемещения третьего вагона в направлении вершины опоры. Крутящий момент двигателя может оставаться сглаженным в результате подключения четвертого вагона, когда третий вагон перемещается через несущую опору. Благодаря использованию изобретения, крутящий момент, прикладываемый двигателем привода, сглаживается, и рывки, поэтому, ограничены.
Транспортная установка 1 может иметь разные конфигурации. Они могут содержать одну или больше опор, четное или нечетное количество вагонов, терминалы, расположенные вверху и внизу, или терминалы, расположенные на одном уровне, и терминал привода может находиться вверху или внизу. Например, для ограничения рывка устройство 17 соединения станции 6-8 соединяет вагоны с другой частотой соединения, чем у устройства 17 соединения на, по меньшей мере, одной из одной других станций 6-8. В предшествующем уровне техники фактически требуется поддерживать идентичное расстояние между вагонами в линии, и в этом случае частота соединения отсоединенных вагонов должна быть идентичной в каждом из терминалов. В предшествующем уровне техники, рывок на поворотном круге не регулируется, и прикладываемый крутящий момент двигателя также не регулируется. И, наоборот, в соответствии с изобретением, в результате соединения вагонов с разной частотой соединения, в зависимости от терминалов, образующееся напряжение, воздействующее на канат, и, таким образом, крутящий момент, прикладываемый двигателем привода, можно регулировать, в соответствии с требованиями, и, в частности, вагоны, соединяют с частотой соединения, которую определяют по степени изменения крутящего момента двигателя.
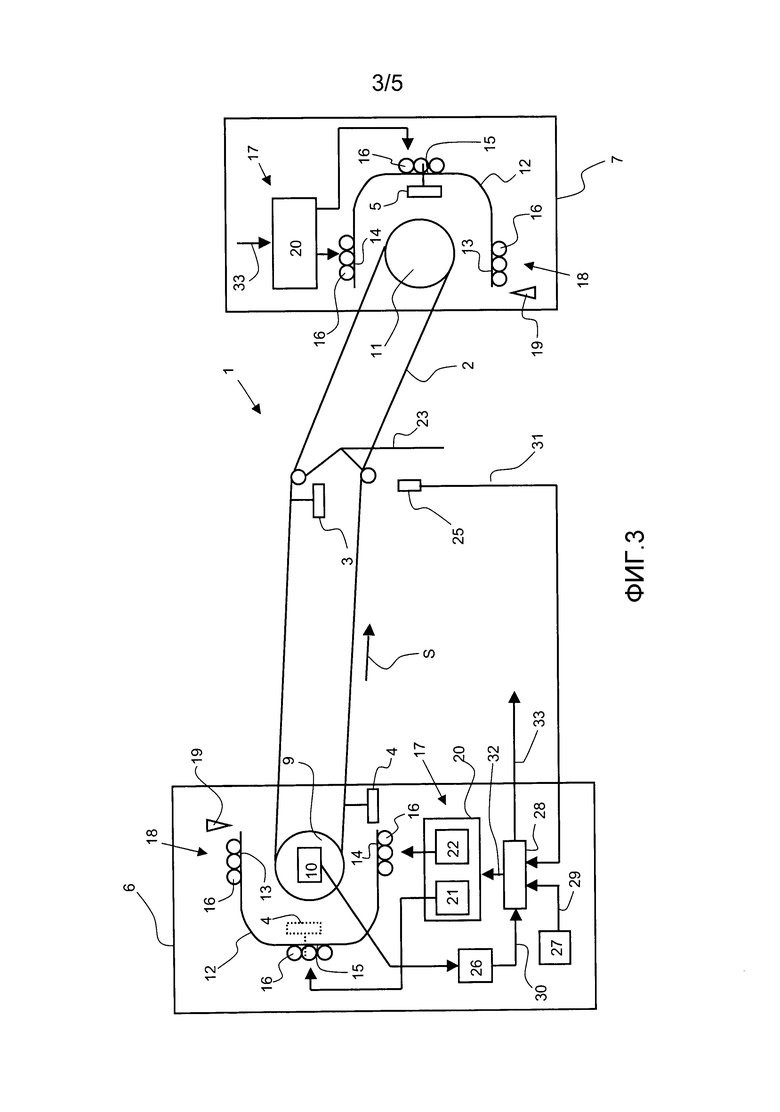
На фиг. 3 представлен другой вариант осуществления изобретения, в котором терминал 6 привода расположен на более высоком уровне, чем другой терминал 7, и вершина несущей опоры 23 расположена на более высоком уровне, чем терминал 6 привода. Номера ссылочных позиций тех же составляющих частей, описанных ранее со ссылкой на фиг. 1, также использованы на фиг. 3. Терминал 6 привода затем представляет собой терминал расположенный вверху. Принцип соединения остается идентичным описанному со ссылкой на фиг. 1.
На фиг. 4 представлен еще один вариант осуществления изобретения, в котором установка 1 содержит расположенный вверху терминал 6 привода, расположенный внизу терминал 7 и промежуточную станцию 8, расположенную между двумя оконечными терминалами 6, 7. Номера ссылочных позиций тех же составляющих частей, описанных ранее со ссылкой на фиг. 1, также использовались на фиг. 4. Кроме того, установка 1 содержит первую несущую опору 23, расположенную между верхним терминалом 6 и промежуточной станцией 8, вершина опоры расположена на более высоком уровне, чем нижний терминал 6, и вторая несущая опора 40 расположена между промежуточной станцией 8 и нижним терминалом 7, верх опоры расположен на более высоком уровне, чем промежуточная станция 8. В этом варианте осуществления, когда первый вагон 3 перемещается через первую несущую опору 23, второй вагон 4 соединяется с промежуточной станцией 8 в направлении верхнего терминала 6. Затем, когда первый вагон 3 перемещается через вторую несущую опору 40, третий вагон 5 соединяется с нижним терминалом 7.
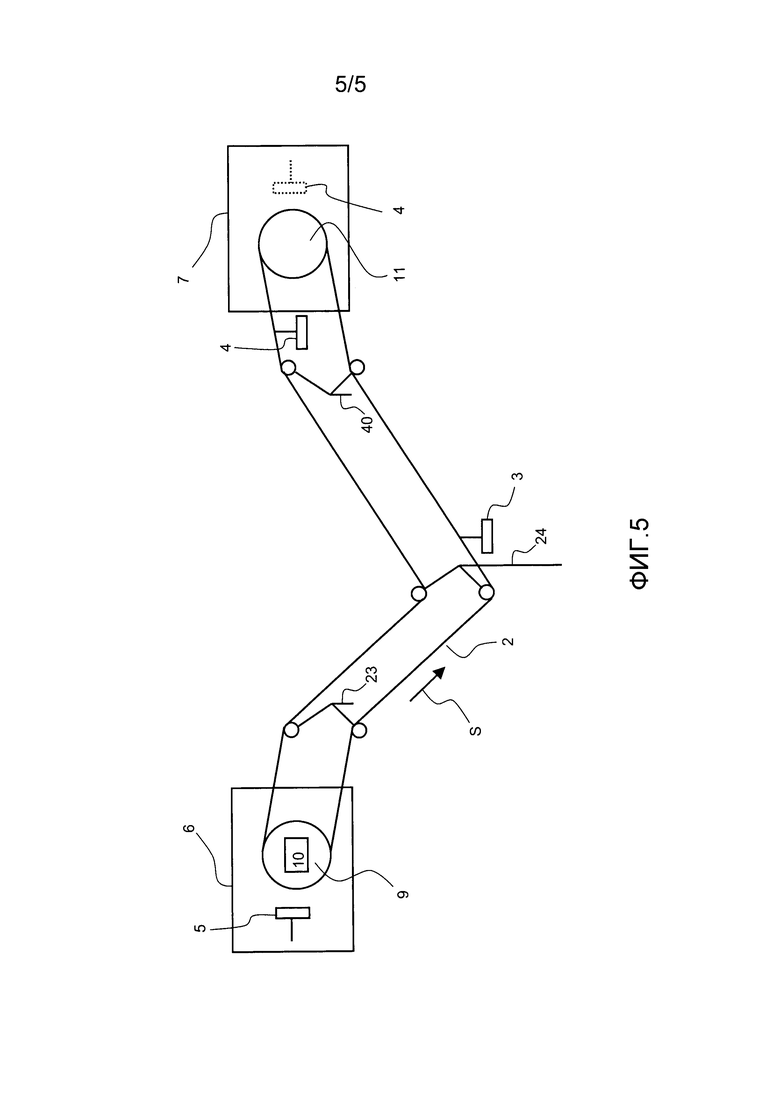
На фиг. 5 представлен еще один, другой вариант осуществления изобретения, в котором установка содержит два терминала 6, 7, расположенные на одном уровне. Номера ссылочных позиций одинаковых составляющих деталей, описанных ранее со ссылкой на фиг. 1, также используются на фиг. 5. Кроме того, установка содержит две несущие опоры 23, 40 и третью прижимающую опору 24, расположенную между первыми двумя опорами 23, 40. В этом случае, когда первый вагон 3 перемещается через третью опору, второй вагон 4 соединен с терминалом 7, расположенным справа на фиг. 5. В качестве варианта, второй вагон может быть соединен с терминалом 6 привода. В соответствии с еще одним вариантом, второй и третий вагоны могут быть соединены одновременно в, соответственно, двух терминалах 6, 7.
Кроме того, способ транспортирования с использованием подвесной дороги может быть воплощен с помощью транспортной установки 1, описанной выше.
Изобретение, описанное, таким образом, обеспечивает комфорт для пассажиров, благодаря ограничению генерируемых рывков, воздействующих на подвесную канатную дорогу установки. Изобретение дополнительно обеспечивает уменьшение потребления энергии двигателем привода подвесной канатной дороги.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИСПОСОБЛЕНИЕ И СПОСОБ ПЕРЕУСТАНОВКИ НЕСУЩЕГО КАНАТА КАНАТНОЙ УСТАНОВКИ | 2017 |
|
RU2741661C2 |
| КОМПЛЕКС ОБОРУДОВАНИЯ КАНАТНОЙ ПОДВЕСНОЙ ДОРОГИ | 2016 |
|
RU2730296C2 |
| Устройство и способ доставки грузов | 2019 |
|
RU2735796C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ("КАНАТНОЕ МЕТРО") | 2012 |
|
RU2506182C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2010 |
|
RU2412840C1 |
| СПОСОБ КОНТРОЛЯ ПРОХОЖДЕНИЯ ВАГОНЕТКИ В УСТАНОВКЕ ДЛЯ ПЕРЕВОЗОК ПО ПОДВЕСНОЙ КАНАТНОЙ ДОРОГЕ | 2010 |
|
RU2526330C2 |
| УСТАНОВКА ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ С НАПРАВЛЕННЫМ ВОКРУГ КОНЦЕВЫХ ШКИВОВ ТЯГОВЫМ И НЕСУЩИМ КАНАТОМ ДЛЯ ПОДВИЖНОГО СОСТАВА | 1996 |
|
RU2145287C1 |
| ГРУЗОПАССАЖИРСКИЙ КАНАТНО-ПЕРЕПРАВОЧНЫЙ КОМПЛЕКС | 2011 |
|
RU2478503C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ И СИСТЕМА ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА ЭКСПЛУАТАЦИИ | 2017 |
|
RU2723573C1 |
| КАНАТНАЯ ТРАНСПОРТНАЯ УСТАНОВКА | 2017 |
|
RU2707975C1 |


Изобретение относится к транспортировке по подвесной канатной дороге, в частности к транспортировке людей в вагонах канатных дорог. Транспортная установка подвесной канатной дороги (2) содержит по меньшей мере два вагона (3-5), в каждом из которых предусмотрен отсоединяемый зажим для отсоединения вагона и соединения вагона с подвесной канатной дорогой (2); по меньшей мере одно соединительное устройство (17) вагонов (3-5) с подвесной канатной дорогой (2); и по меньшей мере одну изгибающую опору (23, 24, 40) подвесной канатной дороги (2). При этом транспортная установка подвесной канатной дороги также содержит средство (25-27) детектирования, предназначенное для детектирования перемещения первого вагона, соединенного с подвесной канатной дорогой (2) через указанную опору (23, 24, 40), выполненное с возможностью передачи по меньшей мере одного сигнала соединения, когда детектируется перемещение, и средство (28) управления упомянутого соединительного устройства (17), соединенное со средством (25-27) детектирования и выполненное с возможностью передавать команду на соединение по меньшей мере одного второго вагона с подвесной канатной дорогой (2) при приеме упомянутого сигнала соединения. В результате уменьшается потребление электроэнергии двигателем привода подвесной канатной дороги и, благодаря ограничению генерируемых рывков, обеспечивается комфорт для пассажиров. 2 н. и 14 з.п. ф-лы, 5 ил.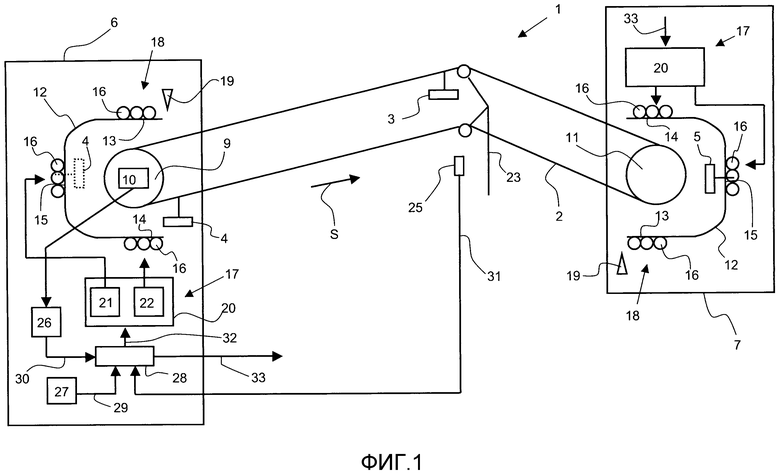
1. Транспортная установка подвесной канатной дороги (2), содержащая:
- по меньшей мере два вагона (3-5), в каждом из которых предусмотрен отсоединяемый зажим для отсоединения вагона и соединения вагона с подвесной канатной дорогой (2);
- по меньшей мере одно соединительное устройство (17) вагонов (3-5) с подвесной канатной дорогой (2); и
- по меньшей мере одну изгибающую опору (23, 24, 40) подвесной канатной дороги (2),
отличающаяся тем, что она содержит:
- средство (25-27) детектирования, предназначенное для детектирования перемещения первого вагона, соединенного с подвесной канатной дорогой (2) через указанную опору (23, 24, 40), средство (25-27) детектирования выполнено с возможностью передачи по меньшей мере одного сигнала соединения, когда детектируется перемещение; и
- средство (28) управления упомянутого соединительного устройства (17), соединенное со средством (25-27) детектирования и выполненное с возможностью передавать команду на соединение по меньшей мере одного второго вагона с подвесной канатной дорогой (2) при приеме упомянутого сигнала соединения.
2. Установка по п. 1, в которой средство (25-27) детектирования содержит датчик (25) положения, выполненный с возможностью детектирования перемещения упомянутой опоры (23, 24, 40) первого вагона, соединенного с подвесной канатной дорогой (2), и для передачи сигнала соединения в средство (28) управления, когда детектируется перемещение упомянутой опоры (23, 24, 40).
3. Установка по п. 1, в которой средство (25-27) детектирования содержит вычислительный модуль (27), выполненный с возможностью расчета времени, когда первый вагон перемещается через упомянутую опору (23, 24, 40), и передачи сигнала соединения в средство (28) управления при достижении расчетного времени.
4. Установка по п. 1, содержащая двигатель (10) привода подвесной канатной дороги (2) и в которой средство (25-27) детектирования содержит модуль (26) для определения крутящего момента, прикладываемого двигателем (10) привода и передачи сигнала соединения в средство (28) управления, когда абсолютное значение скорости изменения крутящего момента, прикладываемого двигателем (10) привода, выше, чем установленное пороговое значение.
5. Установка по п. 4, в которой модуль (26) содержит средство для измерения тока, потребляемого двигателем (10) привода, и определяет крутящий момент, прикладываемый двигателем (10) привода по измеренному потребляемому току.
6. Установка по п. 4, в которой упомянутая опора представляет собой несущую опору (23, 40) для изгиба подвесной канатной дороги (2) в направлении снижения и средство (25-27) детектирования передает сигнал соединения в средство (28) управления, когда степень уменьшения крутящего момента, прикладываемого двигателем (10) привода, выше, чем установленное пороговое значение.
7. Установка по п. 3, содержащая по меньшей мере одну прижимающую опору (24) для изгиба канатной дороги в направлении подъема и в которой средство (25-27) детектирования передает сигнал соединения в средство (28) управления, когда степень увеличения крутящего момента, прикладываемого двигателем (10) привода, выше, чем установленное пороговое значение.
8. Установка по п. 1, в которой средство (28) управления передает команду в упомянутое соединительное устройство (17) для соединения вагонов (3-5) с переменной частотой соединения.
9. Установка по п. 1, содержащая по меньшей мере две станции (6-8), на каждой из которых установлено соединительное устройство (17) вагонов (3-5) для соединения с подвесной канатной дорогой (2), и в котором средство (28) управления передает команду в соединительное устройство (17) станции (6-8) соединить вагоны (3-5) с подвесной канатной дорогой (2) с частотой соединения, отличающейся от другого соединительного устройства (17) по меньшей мере одной другой станции (6-8).
10. Способ транспортирования с помощью подвесной канатной дороги (2) по меньшей мере двух вагонов (3-5), на каждом из которых установлен отсоединяемый зажим, который отсоединяется от и который соединяется с подвесной канатной дорогой (2), подвесная канатная дорога (2) изгибается по меньшей мере одной опорой (23, 24, 40), отличающийся тем, что он содержит следующие этапы, на которых:
- детектируют перемещение первого вагона, соединенного с подвесной канатной дорогой (2) через упомянутую опору (23, 24, 40); и
- соединяют по меньшей мере второй вагон с подвесной канатной дорогой (2), когда детектируют перемещение.
11. Способ по п. 10, в котором этап детектирования содержит расчет времени, когда первый вагон пройдет через упомянутую опору (23, 24, 40), и этап соединения содержит соединение по меньшей мере второго вагона с подвесной канатной дорогой (2), когда достигается расчетное время.
12. Способ по п. 10, в котором подвесная канатная дорога (2) приводится в движение двигателем (10), этап детектирования содержит определение крутящего момента, прикладываемого двигателем (10), и этап соединения содержит соединение по меньшей мере второго вагона с подвесной канатной дорогой (2), когда абсолютное значение степени изменения крутящего момента, прикладываемого двигателем, выше, чем установленное пороговое значение.
13. Способ по п. 12, в котором подвесная канатная дорога (2) изгибается в направлении снижения по меньшей мере одной несущей опорой (23, 40) и этап соединения содержит соединение по меньшей мере второго вагона с подвесной канатной дорогой (2), когда степень уменьшения крутящего момента, прикладываемого двигателем (10), выше, чем установленное пороговое значение.
14. Способ по п. 12, в котором подвесная канатная дорога (2) изгибается в направлении подъема по меньшей мере одной прижимающей опорой (24) и этап соединения содержит соединение по меньшей мере второго вагона с подвесной канатной дорогой (2), когда степень увеличения крутящего момента, прикладываемого двигателем (10), выше, чем установленное пороговое значение.
15. Способ по п. 10, в котором этап соединения содержит соединение вагонов (3-5) с переменной частотой соединения.
16. Способ по п. 10, содержащий по меньшей мере две станции (6-8), выполненные с возможностью соединения вагонов (3-5) с подвесной канатной дорогой (2), и этап соединения содержит соединение вагонов по меньшей мере в одной станции (6-8) с другими частотами соединения, чем частота по меньшей мере одной другой станции (6-8).
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА (ВАРИАНТЫ) | 2008 |
|
RU2481212C2 |
| Система для управления процессом приготовления трехкомпонентных газовых смесей | 1991 |
|
SU1837264A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2011 |
|
RU2518544C2 |

