Изобретение относится к системам контроля безопасности канатных дорог, т. е. воздушных подвесных канатных дорог, в частности, к таким системам, которые имеют сеть дистанционных датчиков безопасности, распределенных вдоль канатных дорог и предназначенных для обнаружения аварийных или потенциально опасных условий (ситуаций) и выдачи при этом сигналов тревоги, которые передаются операторам канатной дороги.
Понятия "транспортировочное средство канатной дороги" и "транспортировочное средство" используются в данном описании как родовое понятие, означающее любое кресло, корзину, гондолу, контейнер, платформу, Т-образный брус или другое транспортировочное средство, подвешенное на канате подвесной дороги и предназначенное для транспортировки пассажиров и/или грузов. Понятие "башенная опора" относится к любой конструкции, которая служит опорой для каната подвесной дороги.
Задачей изобретения является создание системы оперативного и эффективного обнаружения определенных аномальных или опасных условий на канатной дороге.
Также задача изобретения состоит в создании системы оперативного и эффективного обнаружения аномального или опасного смещения положения магнитопроницаемого каната подвесной дороги.
Следующая задача изобретения - создать систему выявления аномального или опасного смещения положения магнитопроницаемого каната в шкиве, чтобы можно было предпринять меры предосторожности прежде, чем канат выйдет из шкива.
Еще одна задача изобретения заключается в создании системы обнаружения аномального или опасного смещения положения магнитопроницаемого каната в шкиве, как свидетельства возможного нарушения целостности шкива.
Предложенное изобретение решает задачу обеспечения обнаружения ранних стадий нарушения целостности узла канатного шкива канатной дороги, в частности, самого шкива, посредством выработки сигнала предупреждения, прежде чем нарушится поддержка каната, движущегося через шкивный блок.
Следующая задача изобретения состоит в создании системы обнаружения ранних стадий нарушения целостности канатного шкива, чтобы выдать сигнал предупреждения до последующего повреждения шкивного узла.
Изобретение также решает задачу создания системы, имеющей средство оперативного и эффективного обнаружения опасного наклона или раскачивания транспортировочного средства канатной дороги, чтобы, по меньшей мере, выдать сигнал предупреждения, позволяющий принять меры прежде, чем транспортировочное средство ударится и/или отсоединится от каната.
Задачей изобретения также является обнаружение наклона транспортировочного средства канатной дороги в результате его раскачивания в некоторой точке, прежде чем этот наклон приобретет опасный характер.
Решение перечисленных выше и других задач, указанных или подразумеваемых в данном документе, обеспечивает система контроля безопасности канатной дороги, имеющая по меньшей мере один, т.е. один или несколько, датчиков положения каната, которые реагируют на отклонения каната от нормальной линии канатной тяги выдачей сигналов ("сигналов отклонения каната"), соответствующих этим отклонениям. Предпочтительно, на каждой канатной башенной опоре имеется датчик положения каната для каждого каната или части каната, удерживаемой этой башенной опорой. Данная система также может иметь по меньшей мере один, т.е. один или несколько, датчиков вибраций шкива, установленных на соответствующих узлах канатных шкивов и реагирующих на вибрации в них, являющиеся, по меньшей мере, свидетельством нарушения целостности в шкивном узле, с целью выдачи соответствующего этим вибрациям сигнала ("сигнала проблемы в шкиве"). Предпочтительно, на каждом шкивном узле установлен один датчик вибрации. Данная система предпочтительно также имеет, по меньшей мере, один, т. е. один или несколько датчиков наклона транспортировочного средства канатной дороги, установленных на соответствующих транспортировочных средствах, удерживаемых канатом, при этом каждый из датчиков реагирует на чрезмерное раскачивание его транспортировочного средства, выдавая соответствующий сигнал ("сигнал чрезмерного раскачивания"). Эти сигналы идентификации проблемы передаются оператору канатной дороги, чтобы он мог принять предупредительные меры. Возможный вариант выполнения датчика положения каната имеет индукционное устройство, установленное на, по меньшей мере, одном узле канатного шкива, для генерации магнитного потока и восприятия положения каната относительно нормальной линии канатной тяги как функции величины указанного магнитного потока, проникающего в канат. Возможный вариант выполнения датчика вибрации имеет преобразователь для преобразования вибраций в шкивном блоке в соответствующий сигнал и механический фильтр верхних частот для отфильтровывания тех составляющих сигнала, которые соответствуют вибрациям, создаваемым при нормальной работе шкивного блока, при этом неотфильтрованные составляющие сигнала являются сигналом проблемы в шкиве. Вариант выполнения датчика наклона транспортировочного средства канатной дороги содержит наклонный ключ для формирования сигнала ("сигнал наклона") каждый раз, когда наклон транспортировочного средства превышает некоторый установленный пороговый угол наклона; процессор для, по меньшей мере, измерения продолжительности и частоты повторения сигналов наклона и для формирования сигнала чрезмерного наклона, когда продолжительность или частота повторения превышает некоторый установленный соответствующий порог. Каждое транспортировочное средство, имеющее датчик наклона, также имеет радиопередатчик для передачи исходящих из него сигналов чрезмерного раскачивания, а система включает в себя, по меньшей мере, один радиоприемник, установленный на опорной конструкции для каната ("башенной опоре"), для приема передаваемых сигналов чрезмерного раскачивания. Интерфейс, локальный для каждого датчика, (например, установленный на той же башенной опоре, что и датчик) ретранслирует сигналы датчика на базовый компьютер, который обеспечивает соответствующие индикации для оператора канатной дороги. Интерфейс, локальный для каждого радиоприемника, (например, установленный на той же башенной опоре, что и радиоприемник) ретранслирует принятые сигналы на базовый компьютер. Предпочтительно, радиопередатчики на транспортировочных средствах канатной дороги и радиоприемники на башенных опорах используют технологию радиосвязи с расширенным спектром для повышения помехоустойчивости к внешним факторам. Предпочтительно, интерфейсы и базовый компьютер осуществляют связь через общую сеть передачи данных. Каждое транспортировочное средство канатной дороги может также иметь один или несколько ответчиков кода, которые могут передавать определенные индивидуальные коды на соответствующие приемопередатчики базовых станций, расположенные на очень малом расстоянии, например, в пределах нескольких десятков футов (1 фут = 0,3 м). Предпочтительно, каждый передатчик сигнала чрезмерного раскачивания имеет индивидуальный код и каждый раз, когда транспортировочное средство этого передатчика проходит через базовую станцию, приемопередатчик, связанный с компьютером этой базовой станции, выдает импульс для запуска ответчика кода передатчика. Ответчик отвечает передачей запрашиваемого кода. Таким образом, компьютер базовой станции может отслеживать точное местонахождение каждого транспортировочного средства канатной дороги на канате просто за счет знания количества транспортировочных средств на канатной дороге и их распределения. Аналогичным образом, каждое транспортировочное средство канатной дороги и каждый зажим транспортировочного средства могут иметь индивидуальные коды и аналогичную систему ответчика/приемопередатчика, позволяющую предложенной системе контролировать свой парк транспортировочных средств и планировать ремонт и замену зажимов в зависимости от того, сколько раз использовался зажим.
В дальнейшем изобретение поясняется описанием конкретных вариантов его выполнения со ссылками на прилагаемые чертежи, на которых:
на фиг. 1 изображена функциональная структурная схема, представляющая общий вид сети связи между базовым компьютером и множеством интерфейсов на канатных башенных опорах системы согласно изобретению;
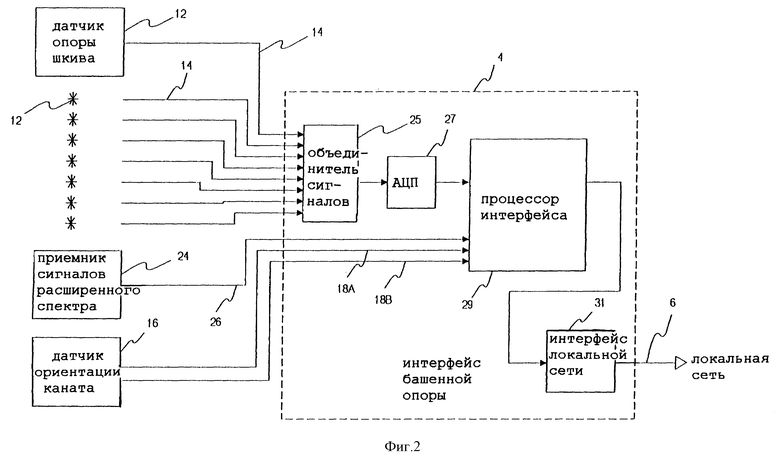
на фиг. 2 - функциональная структурная схема интерфейса на башенной опоре и его линии связи с множеством его локальных датчиков;
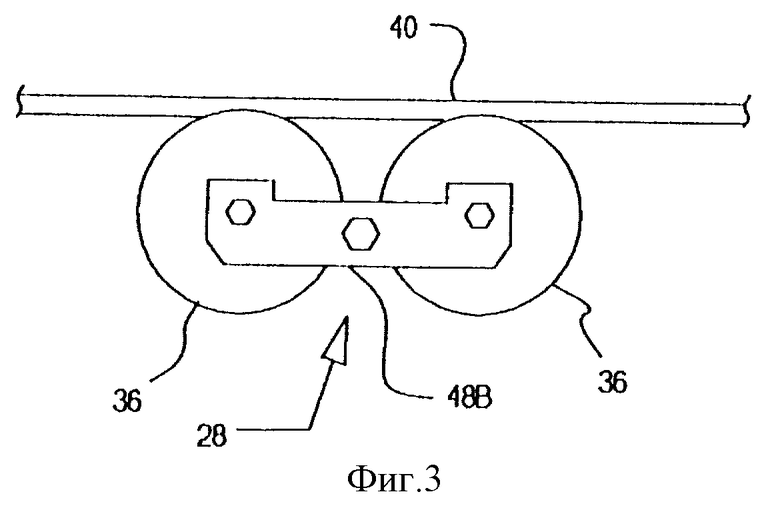
на фиг. 3 - вид сбоку узла шкивной пары, держащего канат, причем пара канатных шкивов соединена фиксатором шкивной пары;
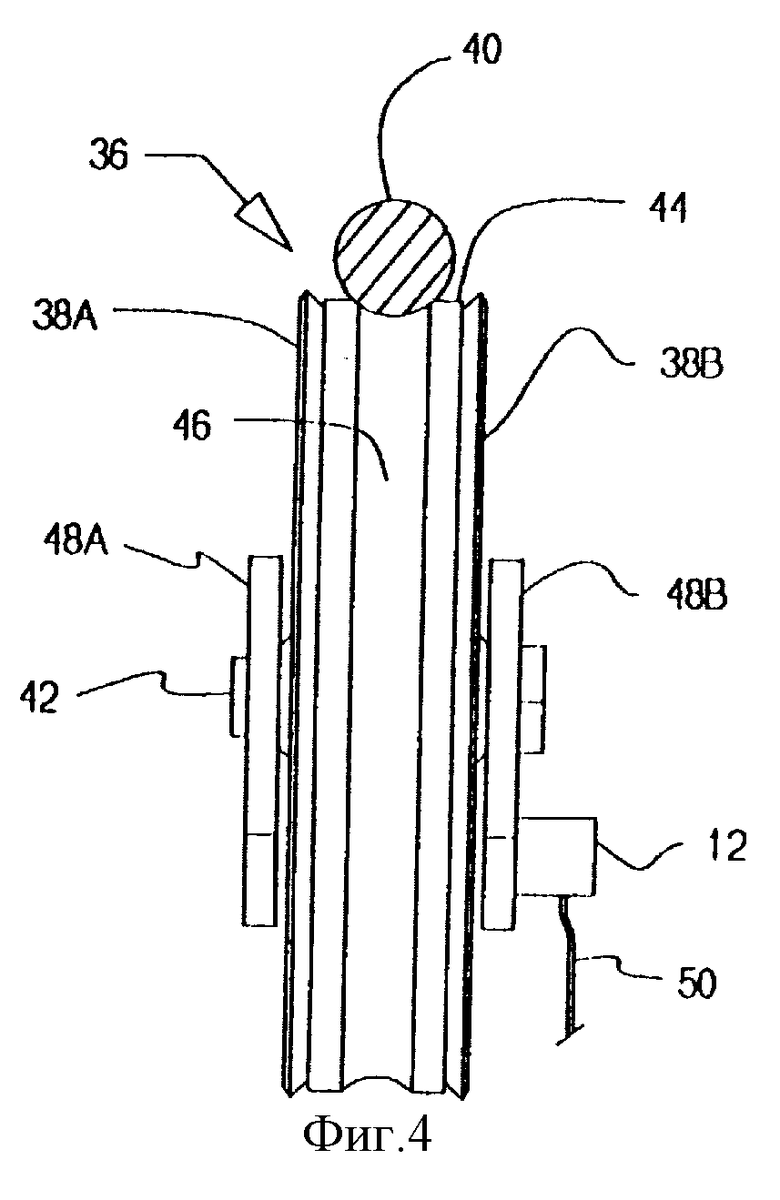
на фиг. 4 - торцевой вид узла шкивной пары по фиг. 3 с предложенным датчиком вибраций, закрепленным на фиксаторе шкивной пары;
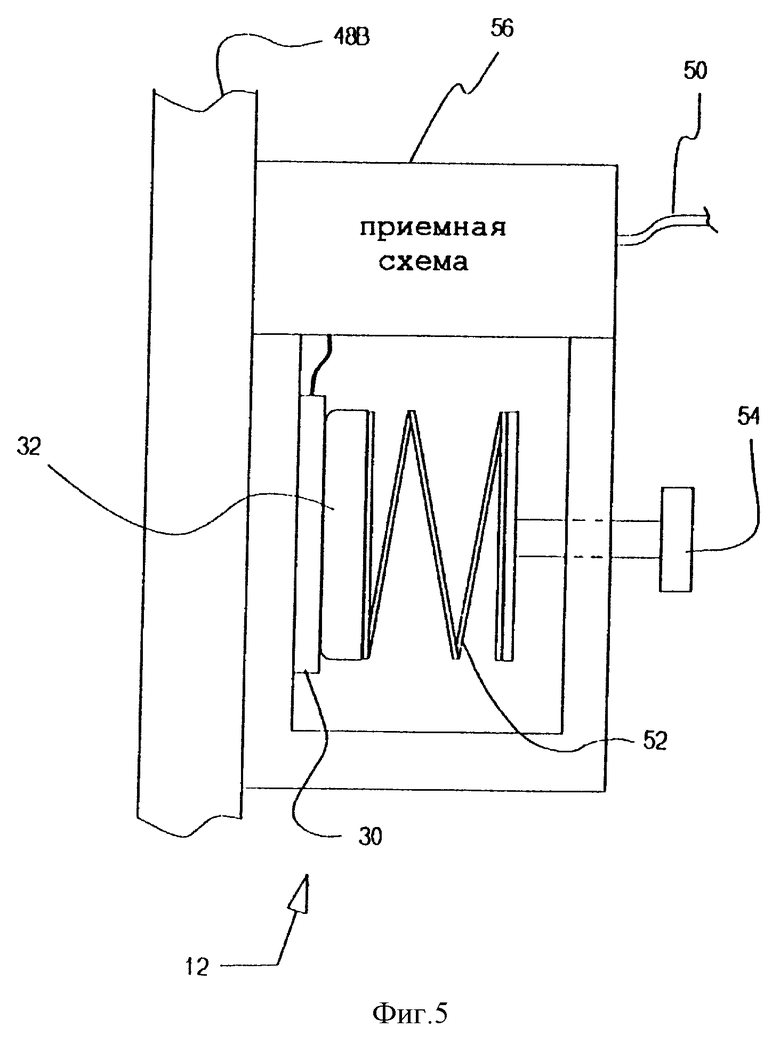
на фиг. 5 - схема датчика вибраций;
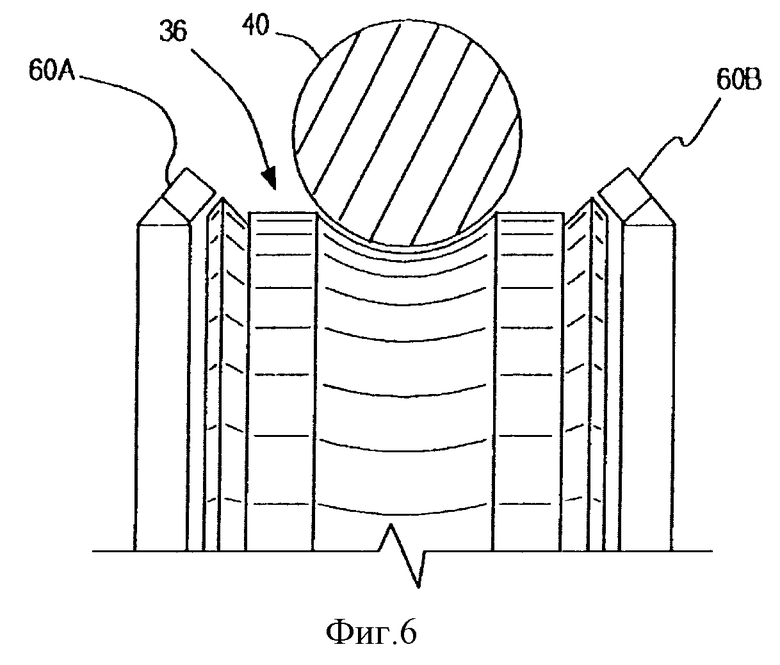
на фиг. 6 - частичный торцевой вид канатного шкива с канатом на нем и двумя датчиками ориентации каната, установленными по обеим сторонам линии канатной тяги;
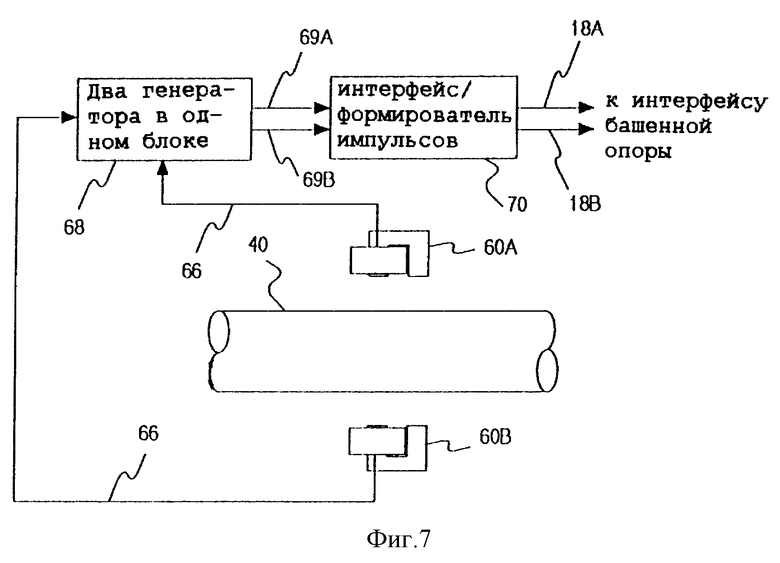
на фиг. 7 - функциональная структурная схема датчика ориентации каната согласно изобретению;
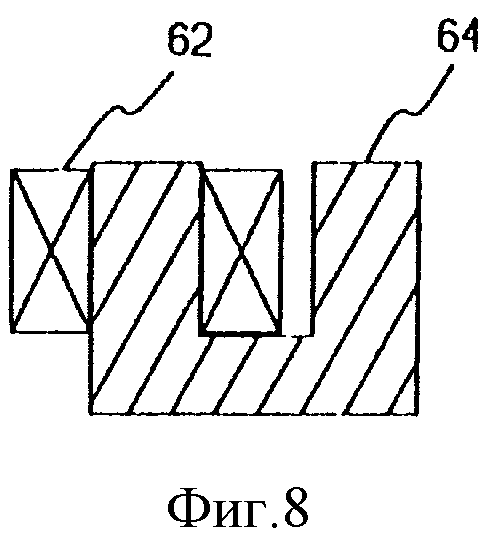
на фиг. 8 - поперечное сечение предложенного индукционного детектора;
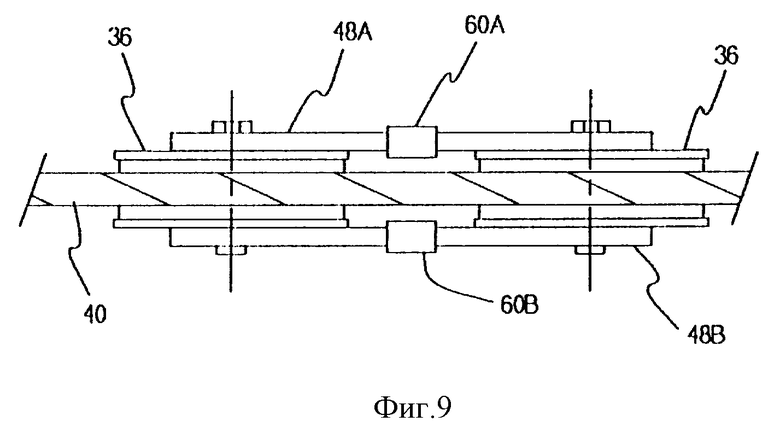
на фиг. 9 - вид сверху узла шкивной пары, показывающий пару датчиков ориентации каната, установленных на фиксаторах шкивов и расположенных по обеим сторонам линии канатной тяги;
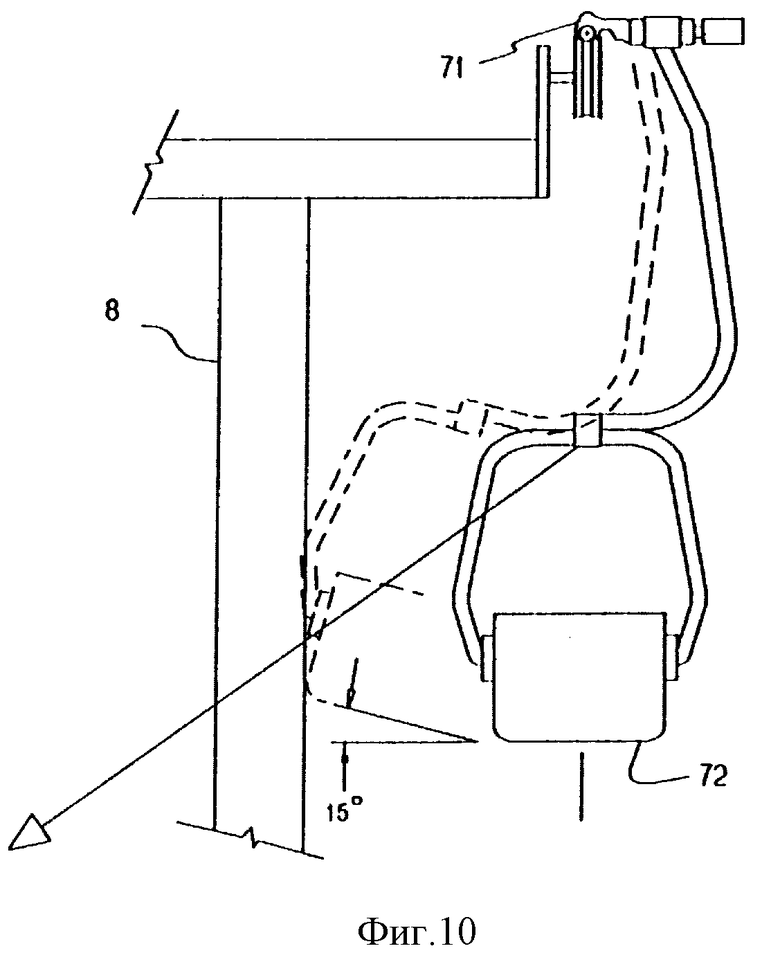
на фиг. 10 - иллюстрация транспортировочного средства канатной дороги, проходящего мимо башенной опоры, при этом пунктиром изображено транспортировочное средство, имеющее избыточный наклон и ударяющее по башенной опоре;
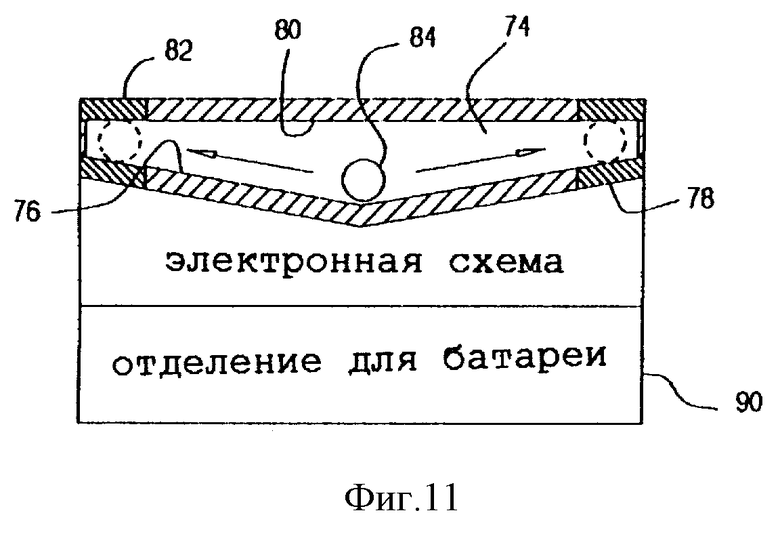
на фиг. 11 - схематический вид в сечении предложенного наклонного ключа;
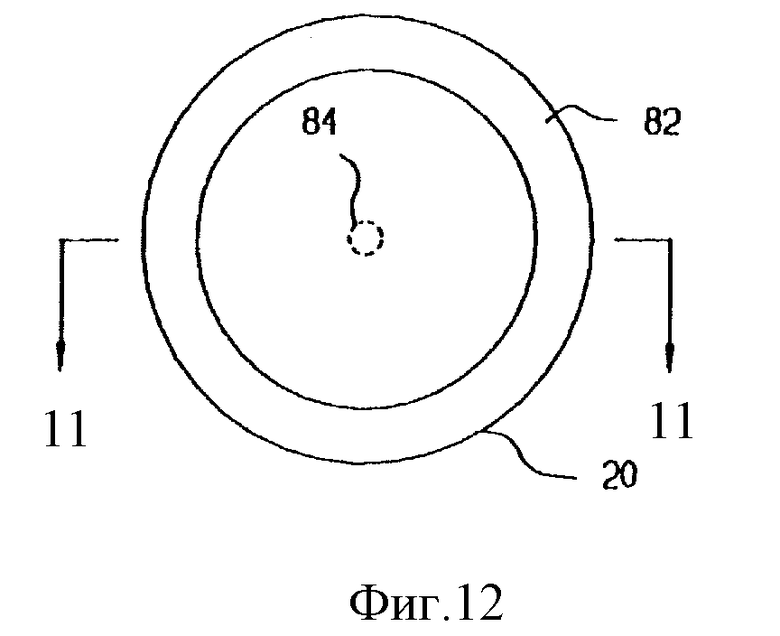
на фиг. 12 - вид сверху наклонного ключа по фиг. 11;
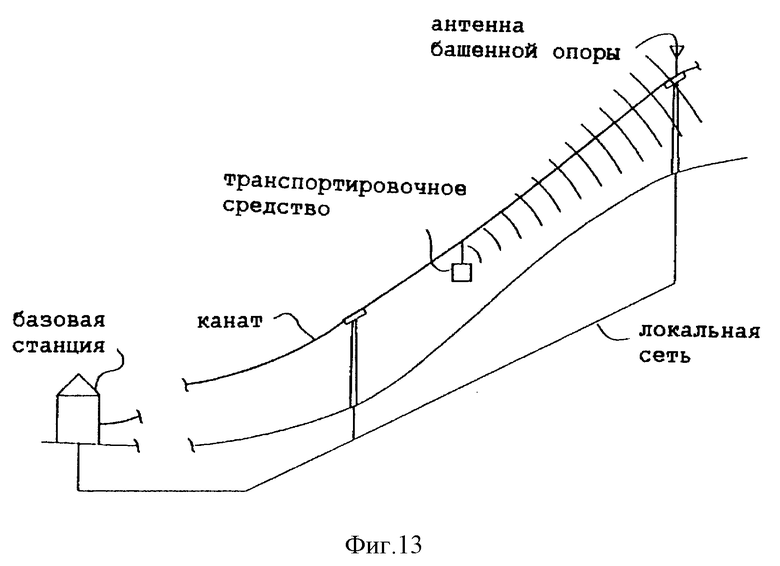
на фиг. 13 - схематическое изображение линии связи между транспортировочным средством канатной дороги и башенной опорой;
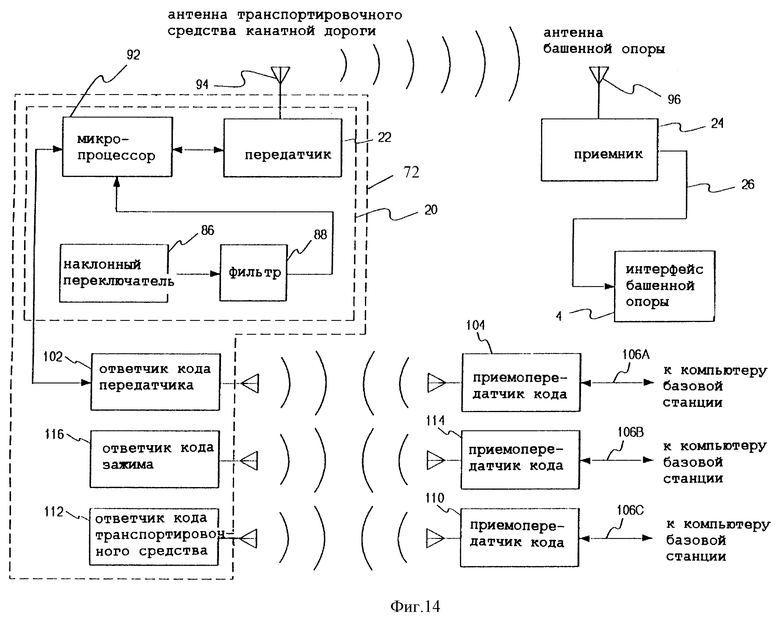
на фиг. 14 - функциональная структурная схема датчика наклона транспортировочного средства канатной дороги, осуществляющего связь с интерфейсом на башенной опоре.
На фиг. 1 и 2 проиллюстрирована система согласно изобретению, имеющая компьютер 2 базовой станции, который осуществляет связь с множеством удаленных интерфейсов 4 на башенных опорах через локальную сеть (LAN) 6. Интерфейсы башенных опор расположены на соответствующих башенных опорах 8. Каждый такой интерфейс контролирует множество своих локальных сенсорных устройств. Основная функция компьютера базовой станции состоит в том, что он постоянно запрашивает сообщения о состоянии сенсорных устройств от интерфейсов на башенных опорах и предоставляет оператору соответствующую информацию о состоянии в реальном масштабе времени. Запросы на сообщение о состоянии могут поступать последовательно для каждой башенной опоры. Компьютер базовой станции обрабатывает информацию, полученную от интерфейсов на башенных опорах, в поисках аварийных условий. Предпочтительно, информация обрабатывается с помощью алгоритмов правдоподобия и корреляции, чтобы повысить надежность результатов. Компьютер базовой станции может иметь набор разных индикаторов 10 для передачи сообщения об аварийных условиях оператору, например, экран монитора и другие оптические, акустические, графические и/или буквенно-цифровые устройства аварийной сигнализации и дисплеи.
На фиг. 1 и 2 изображено одно из возможных сенсорных устройств, которым может быть датчик вибраций шкивной опоры 12. Каждый такой датчик закреплен на опорном элементе шкивного узла, например, фиксаторе шкива, чтобы воспринимать вибрации, характерные для нарушения целостности в узле, например, дезинтеграции самого шкива. Предпочтительно, датчик вибраций закреплен на каждом фиксаторе шкива. Как будет более подробно описано ниже, каждый датчик вибраций вырабатывает аналоговый сигнал 14, соответствующий вибрациям фиксатора, на котором он закреплен. Аналоговый сигнал предварительно обрабатывается и передается на интерфейс локальный для той башенной опоры, на которой расположен датчик.
Вторым типом сенсорного устройства, изображенного на фиг. 1 и 2, может быть датчик ориентации каната 16, который обеспечивает информацию, касающуюся любого перемещения каната в сторону от его линии канатной тяги. Предпочтительно, каждая башенная опора имеет один такой датчик для каждого отрезка каната, удерживаемого ею. Например, башенная опора, имеющая один шкивный узел, держащий канат, который движется вперед, и другой шкивный узел, держащий канат, который движется в обратном направлении, будет иметь два датчика ориентации каната, каждый из которых расположен сзади первого шкива (относительно направления канатной тяги) соответствующего шкивного блока. Как будет более подробно описано ниже, каждый датчик ориентации каната выдает на выходе сигнал 18, соответствующий дифференциалу частоты, который содержит информацию о местоположении каната, для которого предназначен этот датчик, относительно оси канатной тяги. Эта информация передается на локальный интерфейс на башенной опоре, т.е. установленный на той башенной опоре, на которой расположен данный датчик.
На фиг. 1, 2 и 14 изображен также третий тип сенсорного устройства, которым может быть датчик наклона 20, установленный на каждом транспортировочном средстве канатной дороги, который выявляет опасные и/или чрезмерные раскачивания транспортировочного средства. Как будет более подробно описано ниже, этот датчик включает в себя радиопередатчик сигналов с расширенным спектром, и, если датчик определяет раскачивание как опасное или чрезмерное, включается радиопередатчик и передает соответствующий сигнал. Этот сигнал будет принят одним или несколькими радиоприемниками сигналов расширенного спектра 24, расположенными на соответствующих башенных опорах в пределах данного радиопередатчика. Радиоприемники, в свою очередь, передают соответствующие сигналы 26 на свои соответствующие локальные интерфейсы на башенных опорах. Кроме того, каждый датчик наклона может периодически передавать сигнал о состоянии, свидетельствующий о его функционировании.
Как показано на фиг. 1 и 2, каждый интерфейс 4, локальный для башенной опоры 8 или установленный на ней, контролирует восемь датчиков 12 вибраций шкивной опоры и два набора датчиков ориентации каната 16, локальных для данного блока, а также контролирует локальный радиоприемник сигналов расширенного спектра 24 (SS RCVR) на наличие сигналов от транспортировочных средств канатной дороги, находящихся в пределах работы данного приемника. Количество и виды устройств, контролируемых интерфейсами на башенных опорах, может быть больше или меньше, чем было описано, в зависимости от необходимости. Выходные сигналы 14 датчиков вибрации поступают на вход объединителя сигналов 25 (MUX), выходной сигнал которого передается на схему аналогово-цифрового преобразователя 27 (A/D). Выходной сигнал схемы A/D поступает на вход процессора 29 интерфейса, такого как микропроцессор с памятью программ и данных. Селекцией сигналов, проходящих через MUX, может управлять схема задания последовательности (не показана) или микропроцессор. Выходной сигнал 26 радиопередатчика имеет цифровую форму, и поэтому нет необходимости в его преобразовании, и он поступает непосредственно на вход процессора. Датчик ориентации каната вырабатывает две последовательности импульсов 18A и 18D, которые поступают на вход процессора, причем периоды последовательностей импульсов соответствуют частотам соответствующих генераторов, как будет более подробно описано ниже. Процессор интерфейса поддерживает связь с компьютером 2 базовой станции через LAN6 и интерфейс LAN (LAN INTF)31. Интерфейс может также иметь "сторожевую" схему (не показана), предназначенную для периодического уведомления базового компьютера, что данный интерфейс и все датчики, контролируемые им, работают правильно. Интерфейс и радиоприемники помещены в герметичные корпуса.
Изображенный на фиг. 2-5 датчик вибраций шкивной опоры 12 предназначен для контролирования частот вибраций, создаваемых узлом шкивной пары 28, с помощью пьезоэлектрического преобразователя 30. Пьезоэлектрический кристалл вырабатывает напряжение, если вдоль одной оси прикладывается механическое напряжение. Для измерения вибраций с помощью пьезоэлектрического элемента ускорение может быть преобразовано в давление. Поскольку при восприятии вибраций поверхности с помощью пьезоэлектрического элемента сигнал постоянного давления не подходит, ускорение можно преобразовать в давление за счет простого расположения массы 32 сверху. Кроме того, электрический сигнал может быть усилен для определенных частот, если массу подпружинить на поверхности пьезоэлектрического элемента. В этом случае при определенном ускорении масса будет терять контакт с поверхностью, а затем падать и биться о пьезоэлектрический элемент, генерируя более высокое напряжение. Поскольку при определенном давлении пьезоэлектрический элемент всегда вырабатывает напряжение с одинаковой амплитудой, независимо от частоты вибрации, важно усиливать ту полосу частот, которая содержит релевантную информацию.
Датчик шкива выполнен с возможностью обнаружения нарушения целостности в шкиве, так как в случае поломки или потери боковой пластины шкива он будет тереться о смежный фиксатор шкива. При этом происходит трение металлом по металлу, вызывающее вибрации, характерные для данного явления. Задача предложенного датчика - обнаруживать такие вибрации и сообщать о них на базовую станцию, по меньшей мере, для выдачи сигнала тревоги, чтобы можно было оперативно предпринять меры безопасности.
На фиг. 3 и 4 изображен шкивный узел 28, состоящий из двух выровненных в одной плоскости шкивов 36, опирающихся на фиксаторы 48A и 48B и удерживающихся ими на расстоянии. По шкивам движется канат 40. Шкивный блок удерживается вверху башенной опорой (не показана) обычно с помощью зубчатого соединения 42. Каждый шкив содержит круглый диск 44, имеющий относительно мелкую, расположенную по центру его ребра канавку 46, в которой движется канат. Диск с канавкой закреплен между круглыми боковыми пластинами 38A и 38B, расположенными концентрично с диском, но имеющими больший диаметр, чтобы образовать обода. Датчик вибрации 12 установлен на наружном шкивном фиксаторе 48B. Датчик имеет линию связи 50 для передачи своего выходного сигнала на интерфейс на башенной опоре.
Изображенный на фиг. 5 датчик 12 содержит пьезоэлектрический элемент 30, который преобразует механическое давление или ударные колебания в соответствующие электрические сигналы. Свободно перемещающаяся масса 32 подпружинена посредством пружины 52 относительно поверхности пьезоэлектрического элемента. Усилие пружины можно регулировать, например, винтом 54, для изменения чувствительности при разных частотах таким образом, чтобы при нормальной работе вибрации, создаваемые движением шкивов, не могли вызывать ускорения массы, приводящего к ее отрыву от поверхности пьезоэлемента. Следовательно, подпружиненная, свободно перемещающаяся масса действует как механический фильтр верхних частот. В нормальных условиях вырабатывается низкочастотный сигнал за счет нормальных изменений давления на поверхности пьезоэлектрического элемента. Однако, если боковая пластина шкива ломается и начинает выпадать, она будет царапать по фиксатору, создавая вибрации высокой частоты. Эти вибрации будут приводить к ускорению массы на поверхности пьезоэлектрического элемента до такой степени, что она отойдет от поверхности. Затем масса отскочит назад и ударится о пьезоэлектрический элемент. Такой удар вынуждает пьезоэлектрический элемент вырабатывать сигнал высокого напряжения и высокой частоты (по сравнению с частотами, имеющими место при нормальной работе шкивного блока), который будет передан приемной схеме 56. Приемная схема содержит фильтр верхних частот для удаления любой составляющей постоянного тока из пьезоэлектрического сигнала и усилитель для передачи отфильтрованного сигнала в диапазоне напряжений, подходящем для АЦП 27 (фиг. 2), на локальный интерфейс. Линия связи 50 посылает выходной сигнал приемной схемы на интерфейс для последующей передачи на компьютер базовой станции.
Было обнаружено, что базовая частота для нормальной работы шкивного блока кресельного подъемника в зависимости от скорости движения каната составляет от 10 до 15 Гц. Любой дополнительный шум, создаваемый либо царапанием каната о боковую пластину шкива, либо ударением металлического элемента по опорному элементу (что может иметь место во время нарушения целостности шкива), создает частоты около 70 Гц.
Данный датчик вибрации шкивного блока хорошо подходит для использования в качестве предохранительного устройства в любой системе, удерживаемой или приводимой в действие канатом, в которой отсоединение от шкива может создавать проблемы, например, в горнолыжных подъемниках, буксирных канатах, подъемниках на Т-брусе, бугельных подъемниках, пассажирском маршрутном транспорте, противолавинных взрывателях и грузоподъемниках.
Изображенный на фиг. 6-9 датчик ориентации каната выполнен с возможностью измерения магнитного сопротивления (Rm) между канатом и двумя источниками магнитных полей (катушками индуктивности), расположенными на противоположных сторонах каната, оба на известном расстоянии (D). Магнитное сопротивление каждой катушки индуктивности пропорционально этому расстоянию: Rm-D. Индуктивность (L) каждой катушки индуктивности определяется магнитным сопротивлением: L - D/Rm. Это значит, что можно определить расстояние между канатом и катушкой индуктивности, измерив индуктивность. Простым способом измерения индуктивности (L) является использование LC-генератора с постоянной емкостью (С). Частота этого генератора в данном случае пропорциональна только индуктивности: 
Даже несмотря на то, что при постоянной емкости частота генератора, как описано в данной заявке, теоретически является только функцией индуктивности его катушки индуктивности и поэтому пропорциональна расстоянию катушки индуктивности от каната, в действительности существуют еще факторы окружающей среды, в частности, температура, которые также воздействуют на значения L и С. Эти воздействия можно уменьшить до ничтожно малой величины за счет использования температурно стабильных элементов, установленных физически близко друг к другу, а также путем дифференциального измерения характеристик генераторов (сдвигов частот, вызванных движением каната). Таким образом, эффекты параметров окружающей среды, таких как температура и влажность воздуха, становятся обычными явлениями рабочего режима и имеют незначительный или нулевой эффект.
Как показано на фиг. 6-9, магнитопроницаемый канат 40 (например, стальной кабель, используемый в обычных подъемниках), движется по обычному шкиву 36. Катушки индуктивности 60A и 60B установлены на противоположных сторонах шкивного блока. Подходящая катушка индуктивности имеет следующие характеристики: (а) физическую форму, вынуждающую магнитный поток проходить долгий путь через воздух, (в) способность работать на частоте, оптимальной для материала кабеля, (с) низкие потери из-за вихревых токов, и (d) высокую магнитную проницаемость. На чертежах показан примерный вариант выполнения катушки индуктивности в виде проводящей катушки 62, обмотанной вокруг открытого С-образного сердечника, например, железного сердечника. Как показано, открытая поверхность сердечника направлена в сторону каната, так что когда катушка индуктивности запитывается током, сердечник не создает замкнутую петлю для магнитного потока. Однако магнитопроницаемый канат в канавке шкива, находящийся в магнитной связи с катушкой индуктивности, снижает магнитное сопротивление ниже значения, которое бы в противном случае ощущалось. Если канат придвигается ближе к катушке индуктивности (что происходит, когда канат сдвигается из канавки по направлению к катушке индуктивности), магнитное сопротивление катушки индуктивности уменьшается, что означает, что ее индуктивность увеличится.
Изображенные на фиг. 6-9 катушки индуктивности содержат центральные ответвления 66, связанные с соответствующими LC- схемами двух несинхронизируемых генераторов 68. Центральные ответвления позволяют использовать LC-генераторы, работающие в двухтактном режиме, чтобы покрыть потери в материале сердечника. Предпочтительно, эти генераторы имеют идентичную конструкцию и оба встроены в один электронный блок, т.е. на одной схемной плате близко друг к другу, чтобы температурный дрейф имел на них одинаковое влияние. Частота каждого генератора является функцией индуктивности его катушки и выбранной емкости. Величина емкости определяет диапазон частот и должна выбираться в зависимости от магнитных свойств сердечника (предпочтительно, железного) и кабеля. Экспериментальным путем было определено, что оптимальный диапазон частот находится между 40 и 50 КГц для стандартного стального кабеля, используемого на кресельных подъемниках.
Две катушки индуктивности установлены симметрично на противоположных сторонах каната в магнитной связи с линией канатной тяги. Если установить идентичные датчики, они будут иметь в идеале одинаковую индуктивность для каната, расположенного по центру между ними. Если канат смещается от центра по направлению к одному из датчиков, индуктивность этого датчика возрастет, тогда как индуктивность другого уменьшится. Следовательно, частота одного генератора возрастет, а другого - уменьшится. Таким образом, два датчика обеспечивают дифференциальную информацию, касающуюся положения каната.
Изображенные на фиг. 2 и 7 генераторы 68 передают свои соответствующие частоты 69A и 69B на схему интерфейса/формирователя импульсов 70, которая вырабатывает две соответствующие им последовательности импульсов 18A и 18B, передаваемые на процессор 29 интерфейса 4 локального для данного датчика. Последовательности импульсов могут быть синусоидальными сигналами от генераторов, преобразованными в биполярные прямоугольные сигналы, читаемые процессором. В этом случае процессор просто измеряет периоды импульсных последовательностей, чтобы определить частоты генераторов для вычисления дифференциала частоты. Самообучающийся алгоритм, выполняемый процессором, сохраняет в памяти разность между этими двумя частотами во время нормальной работы. Эта разность частот используется для сведения к минимуму влияния температуры на частоты, так как оба генератора находятся в одной и той же среде и имеют дрейф в одном и том же направлении.
Если канат смещается от идеальной центральной линии, разность частот резко изменяется. Если это значение превышает некоторый заранее установленный порог, процессор посылает сигнал на компьютер базовой станции через локальную сеть. Компьютер базовой станции предварительно запрограммирован на различение между нормальными смещениями каната и смещениями, превышающими нормальные пределы. Для смещений, превышающих нормальные пределы, компьютер может также вырабатывать информацию, следует ли замедлить движение каната или немедленно остановить.
Альтернативно, выходные сигналы обоих генераторов можно контролировать с помощью частотомера.
Датчик ориентации каната согласно изобретению хорошо подходит для использования в качестве средства обнаружения боковых смещений магнитопроницаемых канатов, используемых в любой системе, удерживаемой или приводимой в действие канатом, в которой смещение каната может вызывать проблемы, например, на кресельных подъемниках горнолыжных баз, буксирных канатах, подъемниках на Т-брусе, бугельных подъемниках, подъемниках гондол, пассажирском маршрутном транспорте, противолавинных взрывателях и грузоподъемниках.
На фиг. 10 изображена аварийная ситуация, характерная для транспортировочных средств канатной дороги. Раскачивающееся транспортировочное средство 72 может отсоединиться от держащего его каната либо из-за чрезмерного раскачивания, либо из-за удара о башенную опору 8. В этом случае зажим 71 транспортировочного средства может оторваться от каната и транспортировочное средство и его пассажиры упадут на землю, что часто приводит к трагическим результатам.
Изображенный на фиг. 11 и 12 датчик наклона 20 имеет герметично закрытую камеру 74. Дно 76 камеры имеет конусообразную форму и выполнено из непроводящего материала, например, пластика, за исключением обода 78 дна, являющегося контактным кольцом. Потолок 80 камеры может быть выполнен в форме перевернутой чаши или плоским, как показано на чертеже. Он также изготовлен из непроводящего материала за исключением обода 82, также являющегося контактным кольцом. Эти два контактных кольца выровнены друг против друга, образуя клин вокруг обода камеры, и предпочтительно покрыты золотом. Внутри камеры находится электропроводящий шарик 84, например, позолоченный. Электрические провода (не показаны) обеспечивают связь между герметично закрытыми контактными кольцами и наружными схемами. Камера с расположенным в ней шариком и контактные кольца образуют наклонный переключатель 86. Датчик наклона установлен на транспортировочном средстве канатной дороги вертикально в соответствии с линией центра тяжести транспортировочного средства.
В работе, когда транспортировочное средство находится в положении покоя, шарик находится в самой нижней точке конического дна, но когда датчик наклоняется, шарик стремится скатиться к ободу камеры. Если наклон достаточно резкий, шарик будет закатываться в клин между противоположными контактными кольцами, касаясь их обоих, и электрически замыкать контакты. Наклон дна камеры относительно горизонтали предпочтительно устанавливается меньше опасного наклона, изображенного на фиг. 10.
Как упоминалось выше, наклонный ключ чувствителен к наклону транспортировочного средства во всех направлениях в радиусе 360 градусов. Однако можно предусмотреть "слепые" точки электрического контакта в направлении линии канатной тяги, препятствующие замыканию ключа, когда транспортировочное средство ускоряет движение или останавливается. Это легко достигается путем нанесения изолятора на контактные кольца в определенных секторах. Кроме того, камера с шариком может быть заполнена относительно вязкой жидкостью, такой как этиленгликоль, для соответствующего замедления движения шарика.
Как изображено на фиг. 11, 13 и 14, замыкание наклонного переключателя вызывает образование сигналов, которые передаются на блок фильтра 88, питающийся от литиевой батареи 90. Выходной сигнал блока фильтра поступает на микропроцессор 92 (предпочтительно, КМОП). Для сбережения энергии батареи микропроцессор в нормальных условиях находится в режиме малого потребления тока, но начинает потреблять ток, когда замыкание наклонного ключа продолжается в течение заранее установленного интервала времени, определенного постоянной времени схемы в блоке фильтра. Это препятствует запуску микропроцессора, если возникают случайные контакты в результате обычных вибраций. Во время запитывания током микропроцессор выполняет программу, которая проверяет продолжительность замыкания и скорость повторения. Поскольку физические параметры транспортировочного средства канатной дороги известны, период колебания транспортировочного средства является известной постоянной, зависящей от нагрузки. Если время замыкания и скорость повторения раскачиваний превышает некоторый установленный предел, микропроцессор включает радиопередатчик сигналов с расширенным спектром 22, который передаст сигнал через антенну 94 транспортировочного средства на одну или несколько антенн 96 на башенных опорах. (См. также антенны, изображенные на фиг. 1). Каждый радиопередатчик транспортировочного средства имеет собственный индивидуальный код, который передается вместе с передаваемым сигналом. Башенные опоры, находящиеся в пределах работы радиопередатчика, будут ретранслировать этот сигнал вместе с кодом транспортировочного средства на компьютер базовой станции через локальную сеть. Датчик наклона также периодически передает сигнал состояния, предупреждающий компьютер базовой станции, что он функционирует нормально.
Таким образом, каждое транспортировочное средство канатной дороги имеет собственный датчик наклона, питающийся от литиевой батареи, которая особенно подходит для низких температур. Поскольку каждое транспортировочное средство имеет собственный индивидуальный код, компьютер базовой станции может также содержать программу для отслеживания местонахождения каждого транспортировочного средства, чтобы его можно было быстро найти в случае поступления сигнала тревоги от датчика транспортировочного средства.
Изображенный на фиг. 1 и 14 радиопередатчик 22 каждого транспортировочного средства канатной дороги имеет индивидуальный код, и каждый раз, когда транспортировочное средство с данным радиопередатчиком проходит через базовую станцию, приемопередатчик 104 базовой станции, осуществляющий связь с компьютером базовой станции, выдает импульс запуска ответчика 102 кода радиопередатчика на данном транспортировочном средстве. Ответчик управляет микропроцессором транспортировочного средства, который передает код радиопередатчика на ответчик. Ответчик отвечает передачей запрашиваемого кода. Для приемопередатчика и ответчика необходим диапазон всего в несколько метров, так как они располагаются достаточно близко, когда транспортировочное средство проходит через базовую станцию. Таким образом, компьютер базовой станции отслеживает точное местонахождение каждого транспортировочного средства канатной дороги на канате просто на основании известного количества и распределения транспортировочных средств на канатной дороге. Аналогичным образом, каждое транспортировочное средство и каждый зажим транспортировочного средства могут иметь индивидуальный код и подобную систему ответчика/приемопередатчика, чтобы позволить системе контролировать свой парк транспортировочных средств и планировать ремонт и замену зажимов в зависимости от того, сколько раз использовался зажим. Как показано, базовая станция имеет приемопередатчик 110 кода транспортировочного средства канатной дороги и взаимосвязанный с ним ответчик 112, а также приемопередатчик 114 зажима транспортного средства и связанный с ним ответчик 116.
Несмотря на то, что выше был описан предпочтительный вариант наклонного ключа, можно использовать практически любой вид наклонного ключа, который может вырабатывать сигнал, когда транспортировочное средство канатной дороги наклоняется до или выше выбранного углового предела. Например, можно использовать ртутные реле и микромеханически обработанные акселерометры с емкостным датчиком. Также наклонный ключ может представлять собой модификацию или комбинацию других наклонных ключей.
Описанные выше радиопередатчики сигналов расширенного спектра могут быть обычными радиопередатчиками, имеющими индивидуальные коды. Одна такая система радиопередатчика/радиоприемника фирмы RADIONICS может содержать до 255 радиопередатчиков с индивидуальными кодами. Они работают в полосе частот 902-928 МГц. Поскольку сигналы расширенного спектра имеют короткую продолжительность и охватывают широкий диапазон частот, на них меньше влияют радиопередачи от других устройств в полосе частот 900 МГц. Устройства, работающие в этом диапазоне частот, обычно ведут передачу на одной частоте, но даже сильный сигнал от одного из таких устройств не может повлиять на всю передачу сигналов с расширенным спектром.
Факультативно, система может также содержать сенсорный блок для регистрации каждого зажима и каждого транспортировочного средства канатной дороги, прибывающего на базовую станцию. Эту информацию можно использовать для регистрации количества открытий и закрытий каждого зажима и моментального определения местонахождения каждого транспортного средства на канатной трассе.
Изображенный на фиг. 1 центральный компьютер 100 может служить основой для центральной системы управления, используемой в качестве командного центра для всех компьютеров базовых станций. Центральный компьютер может обеспечивать обновление программ, централизованные функции резервирования и восстановления, проведения ревизий и выдачи отчетов, дистанционной поддержки, а также позволяет диспетчеру вести наблюдение за всеми канатными системами.
Факультативно, микромеханические вибродатчики могут быть закреплены на кожухе зубчатой передачи и подшипниках приводного механизма канатной дороги. Выходные сигналы можно предварительно обрабатывать аналогично сигналами пьезоэлектрического элемента в датчике вибрации шкивной опоры, а затем посылать непосредственно на компьютер базовой станции.
Приведенное выше описание и чертежи служат только в целях иллюстрации, при этом подразумевается, что изобретение не ограничено раскрытыми вариантами его выполнения, а охватывает любые альтернативные и эквивалентные варианты, модификации и изменения компоновки элементов, подпадающие под объем прилагаемой формулы изобретения. Например, радиопередатчики и радиоприемники, используемые для датчиков наклона транспортного средства канатной дороги не обязательно должны быть устройствами передачи сигналов расширенного спектра, а могут применяться любые беспроводные средства передачи и приема, способные передавать сигналы от транспортировочного средства на башенную опору в описанном выше контексте.
Сущность изобретения: система контроля безопасности канатной дороги включает в себя датчики, которые осуществляют связь с базовой станцией и, предпочтительно, с компьютером базовой станции. Датчик отклонения каната обнаруживает отклонения каната от нормальной линии канатной тяги и вырабатывает сигнал отклонения каната. Датчик вибрации на каждом шкиве обнаруживает вибрации, характерные для нарушения целостности шкивного блока, и вырабатывает сигнал вибрации. Каждый из этих датчиков имеет радиопередатчик для передачи его сигналов на радиоприемник на башенных опорах канатной дороги. Интерфейсы, локальные для групп датчиков, ретранслируют сигналы на компьютер базовой станции для обеспечения информации оператору канатной дороги. Радиопередатчики и радиоприемники предпочтительно работают в расширенном спектре для обеспечения помехоустойчивости. Интерфейсы и базовый компьютер осуществляют связь через общую сеть передачи данных. Допускается использование других видов датчиков и кодов для идентификации конкретных аспектов работы системы канатной дороги. Технический результат - создание системы обнаружения аномальных или опасных условий на канатной дороге. 3 с и 18 з.п. ф-лы, 14 ил.
| US 4003314 A, 18.01.1977 | |||
| US 4271763 A, 09.06.1981 | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| US 4220095 A, 02.09.1980 | |||
| Устройство для телесигнализации | 1975 |
|
SU514316A1 |
| Устройство для сигнализации положения исполнительного механизма | 1981 |
|
SU1001133A1 |
| SU 226666 A, 05.11.1969. | |||

