Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известно устройство вертикального перемещения многофункционального дагностико-хиругического операционного стола с возможностью информационно-компьютерного управления (см. заявку №2011133904 от 15.08.2011), включающее вертикальный корпус стола с возможностью изменения высоты, который позиционно расположен в его основании, при этом основание стола закреплено на неподвижной поверхности и выполнено в виде цилиндра с внешними ребрами жесткости, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров внешнего и внутреннего с возможностью возвратно поступательного смещения внутреннего цилиндра, между которыми расположены направляющие в виде двух последовательных кольц с полукруглыми пазами, в которых расположены продольные направляющие, закрепленные с внутренней поверхности внешнего цилиндра и внешней поверхности внутреннего цилиндра, при этом в нижней части внешнего цилиндра и на расстоянии от верхней части внутреннего цилиндра зафиксированы вставные шайбы, на противоположных сторонах которых выполнены круглые пазы, между которыми располагают линейный привод возвратно-поступательного перемещения внутреннего цилиндра относительно внешнего неподвижного цилиндра (прототип).
Недостатком известного операционного стола является ограничение его функциональных возможностей, поскольку он предназначен для решения конкретной задачи и не включает робототехническую систему с возможностью информационно-компьютерного управления для проведения как хирургических процедур, так и диагностики.
Техническим результатом предложенного изобретения является усовершенствование известного операционного стола с возможностью как вертикального, так и горизонтального перемещения путем позиционного совмещения его с робототехнической системой с возможностью информационно-компьютерного управления для проведения как хирургических процедур, так и диагностики.
Указанный технический результат достигается следующим устройством.
Устройство индивидуального подъема диагностических и хирургических элементов в многофункциональной дагностико-хиругической робототехнической системе операционного стола с возможностью информационно-компьютерного управления, включающее вертикальный корпус операционного стола с возможностью изменения высоты, который позиционно расположен в основании вертикального корпуса, которое закреплено на неподвижной поверхности и выполнено в виде цилиндра с внешними ребрами жесткости, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров внешнего и внутреннего с возможностью возвратно-поступательного смещения внутреннего цилиндра корпуса относительно внешнего цилиндра корпуса посредством линейного привода, а также включает дополнительный вертикальный корпус с крышкой и привод для ее разворота, к которой под углом 120° зафиксированы три подъемных устройства индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими и хирургическими элементами, при этом устройство индивидуального подъема корпусов со сферической внешней поверхностью выполнено из двух смещенных друг относительно друга дополнительных цилиндров, между которыми расположены направляющие в виде двух полукруглых планок с пазами, смещенные друг относительно друга по высоте дополнительных цилиндров, в которых расположены продольные направляющие, при этом полукруглые планки закреплены с внутренней стороны внешнего дополнительного цилиндра со стороны фиксации его с крышкой вертикального корпуса, а продольные направляющие закреплены с внешней стороны внутреннего дополнительного цилиндра в зоне смещения первого и второго дополнительного цилиндра и смещены друг относительно друга на его поверхности, при этом в верхней части с внутренней стороны внутреннего дополнительного цилиндра закреплена нижняя часть корпуса со сферической внешней поверхностью и вставная шайба с осевым отверстием для фиксации выдвижной части дополнительного линейного привода, нижняя часть корпуса которого зафиксирована на вставной шайбе внешнего дополнительного цилиндра и закреплена внутри его нижней части.
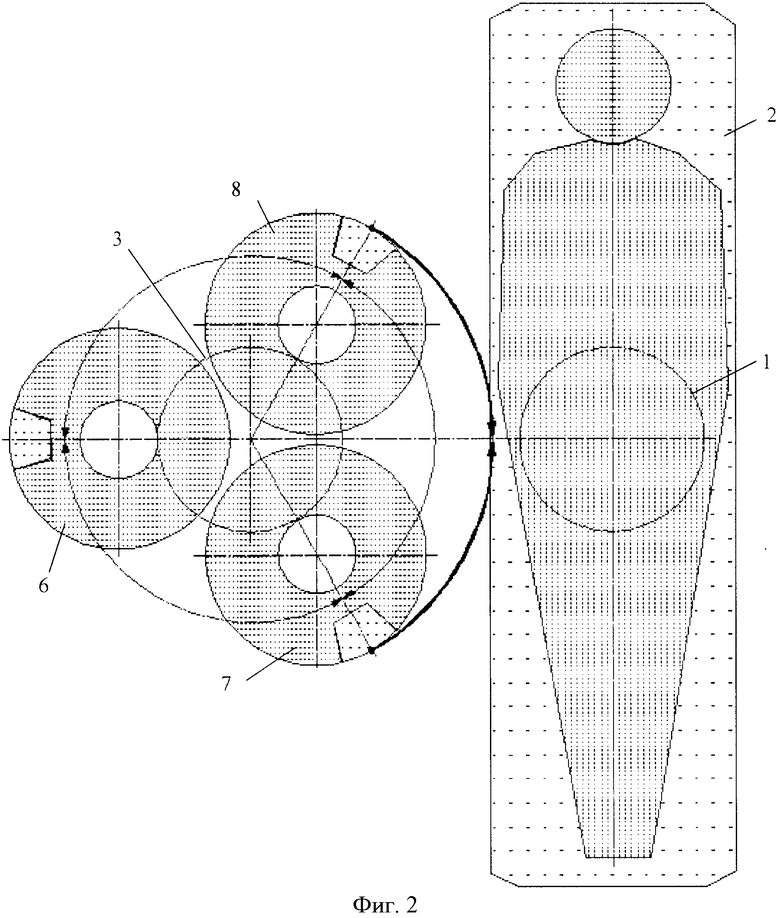
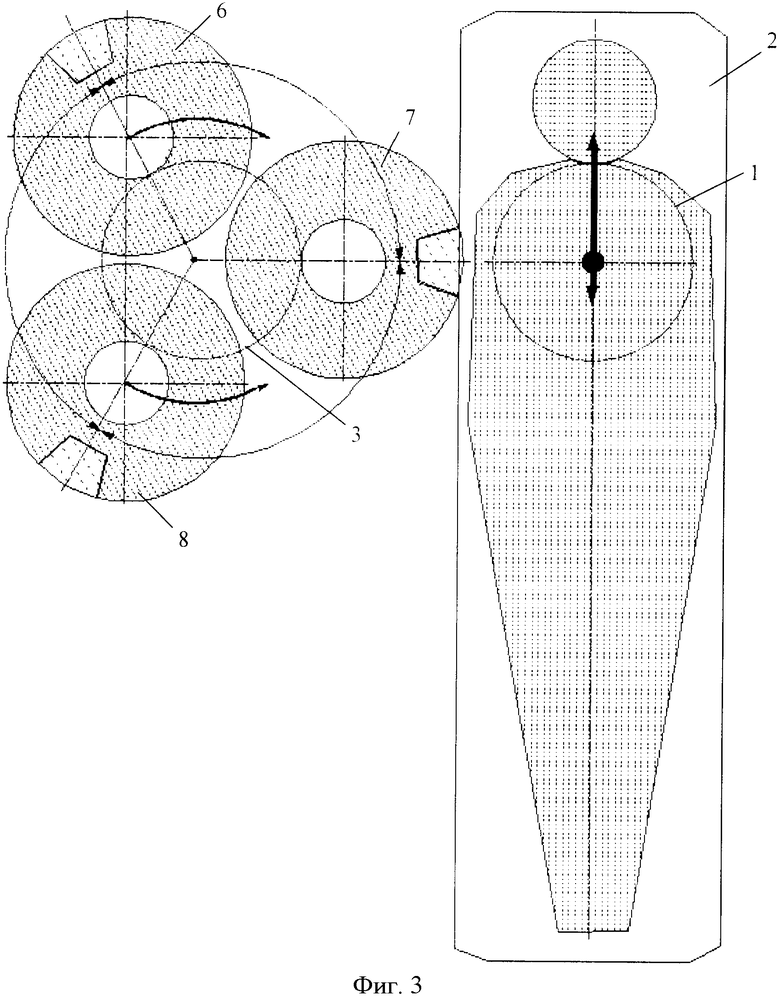
На фиг.1 изображено устройство индивидуального подъема диагностических и хирургических элементов в многофункциональной дагностико-хиругической робототехнической системе операционного стола с возможностью информационно-компьютерного управления. На фиг.2 и 3 изображено позиционное положение трех корпусов с внешней сферической поверхностью для диагностических и хирургических элементов с возможностью разворота и операционный стол с возможностью горизонтального перемещения.
Устройство индивидуального подъема диагностических и хирургических элементов в многофункциональной дагностико-хиругической робототехнической системе операционного стола с возможностью информационно-компьютерного управления включает (Фиг.2) вертикальный корпус 1 хирургического стола 2 с возможностью изменения высоты. А также включает дополнительный вертикальный корпус 3 с крышкой 4 и привод с редуктором 5 для ее разворота, к которой под углом 120° зафиксированы три подъемных устройства 6, 7 и 8 индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими и хирургическими элементами, при этом устройство индивидуального подъема 9 корпусов 6, 7 и 8 со сферической внешней поверхностью выполнено из двух смещенных друг относительно друга дополнительных цилиндров 10 и 11, между которыми расположены направляющие в виде двух полукруглых планок 12 и 13 с пазами, смещенные друг относительно друга по высоте дополнительных цилиндров 10 и 11, в которых расположены продольные направляющие 14. При этом полукруглые планки 12 и 13 закреплены с внутренней стороны внешнего дополнительного цилиндра 11 со стороны фиксации его с крышкой 4 дополнительного вертикального корпуса 3, а продольные направляющие 14 закреплены с внешней стороны внутреннего дополнительного цилиндра 10 в зоне смещения дополнительных цилиндров и смещены друг относительно друга на его поверхности, при этом в верхней части 15 с внутренней стороны внутреннего дополнительного цилиндра 10 закреплена нижняя часть корпуса 6, 7 и 8 со сферической внешней поверхностью и вставная шайба 16 с осевым отверстием для фиксации выдвижной части дополнительного линейного привода 17, нижняя часть корпуса 18 которого зафиксирована на вставной шайбе 19 внешнего дополнительного цилиндра 11 и закреплена внутри его нижней части.
Устройство индивидуального подъема диагностических и хирургических элементов в многофункциональной дагностико-хиругической робототехнической системе операционного стола с возможностью информационно-компьютерного управления в данном исполнении может быть использовано как для проведения хирургической операции, так и для диагностики, поскольку хирургический стол 2 (фиг.2 и 3) с возможностью продольного перемещения позволяет выполнять перемещение операционного стола 2 с пациентом в позиционное положение расположения трех корпусов 6, 7 и 8 с внешней сферической поверхностью для выполнения диагностических (рентген, УЗИ) и хирургических процедур. При этом устройство индивидуального подъема включает дополнительный вертикальный корпус 3 с крышкой 4 и привод с редуктором 5 для ее разворота, к которой под углом 120° зафиксированы три подъемных устройства 6, 7 и 8 индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими и хирургическими элементами. При этом устройство индивидуального подъема 9 корпусов 6, 7 и 8 со сферической внешней поверхностью выполнено из двух смещенных друг относительно друга дополнительных цилиндров 10 и 11, между которыми расположены направляющие в виде двух полукруглых планок 12 и 13 с пазами, смещенные друг относительно друга по высоте дополнительных цилиндров 10 и 11, в которых расположены продольные направляющие 14. При этом полукруглые планки 12 и 13 закреплены с внутренней стороны внешнего дополнительного цилиндра 11 со стороны фиксации его с крышкой 4 дополнительного вертикального корпуса 3, а продольные направляющие 14 закреплены с внешней стороны внутреннего дополнительного цилиндра 10 в зоне смещения дополнительных цилиндров и смещены друг относительно друга на его поверхности. При этом в верхней части 15 с внутренней стороны внутреннего дополнительного цилиндра 10 закреплена нижняя часть корпуса 6, 7 и 8 со сферической внешней поверхностью и вставная шайба 16 с осевым отверстием для фиксации выдвижной части дополнительного линейного привода 17, нижняя часть корпуса 18 которого зафиксирована на вставной шайбе 19 внешнего дополнительного цилиндра 11 и закреплена внутри его нижней части.
Такая конструкция робототехнической системы позволяет выполнять независимый подъем трех устройств 6, 7 и 8 (Фиг.2 и 3) индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами и хирургическими робототехническими элементами, а их разворот реализуется посредством крышки дополнительного вертикального корпуса 3, на котором закреплен привод 5 для их разворота.
Использование предложенного технического решения позволяет расширить функциональные возможности устройства вертикального перемещения многофункционального дагностико-хиругического операционного стола с возможностью информационно-компьютерного управления путем конструктивного расширения его функциональных возможностей.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Устройство индивидуального подъема диагностических и хирургических элементов в многофункциональной диагностико-хирургической робототехнической системе операционного стола с возможностью информационно-компьютерного управления, включающее вертикальный корпус операционного стола, дополнительный вертикальный корпус с крышкой и привод для ее разворота, к которой под углом 120° зафиксированы три подъемных устройства индивидуального подъема корпусов со сферической внешней поверхностью. При этом устройство индивидуального подъема корпусов со сферической внешней поверхностью выполнено из двух смещенных друг относительно друга дополнительных цилиндров, между которыми расположены направляющие, при этом в верхней части с внутренней стороны внутреннего дополнительного цилиндра закреплена нижняя часть корпуса со сферической внешней поверхностью и вставная шайба с осевым отверстием для фиксации выдвижной части дополнительного линейного привода, нижняя часть корпуса которого зафиксирована на вставной шайбе внешнего дополнительного цилиндра и закреплена внутри его нижней части. Устройство позволяет осуществлять перемещение диагностических и хирургических элементов в вертикальной плоскости. 3 ил.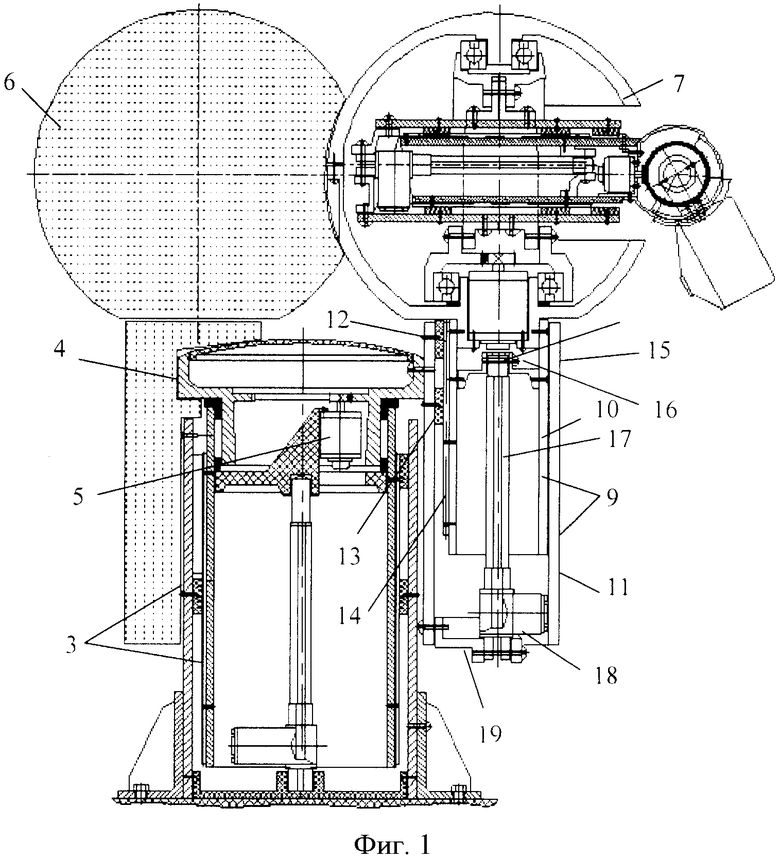
Устройство индивидуального подъема диагностических и хирургических элементов в многофункциональной диагностико-хирургической робототехнической системе операционного стола с возможностью информационно-компьютерного управления, включающее вертикальный корпус операционного стола с возможностью изменения высоты, который позиционно расположен в основании вертикального корпуса, которое закреплено на неподвижной поверхности и выполнено в виде цилиндра с внешними ребрами жесткости, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров внешнего и внутреннего с возможностью возвратно поступательного смещения внутреннего цилиндра корпуса относительно внешнего цилиндра корпуса посредством линейного привода, а также включает дополнительный вертикальный корпус с крышкой и привод для ее разворота, к которой под углом 120° зафиксированы три подъемных устройства индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими и хирургическими элементами, отличающееся тем, что устройство индивидуального подъема корпусов со сферической внешней поверхностью выполнено из двух смещенных относительно друг друга дополнительных цилиндров, между которыми расположены направляющие в виде двух полукруглых планок с пазами, смещенные относительно друг друга по высоте дополнительных цилиндров, в которых расположены продольные направляющие, при этом полукруглые планки закреплены с внутренней стороны внешнего дополнительного цилиндра со стороны фиксации его с крышкой вертикального корпуса, а продольные направляющие закреплены с внешней стороны внутреннего дополнительного цилиндра в зоне смещения первого и второго дополнительного цилиндра и смещены относительно друг друга на его поверхности, при этом в верхней части с внутренней стороны внутреннего дополнительного цилиндра закреплена нижняя часть корпуса со сферической внешней поверхностью и вставная шайба с осевым отверстием для фиксации выдвижной части дополнительного линейного привода, нижняя часть корпуса которого зафиксирована на вставной шайбе внешнего дополнительного цилиндра и закреплена внутри его нижней части.
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МАНИПУЛЯЦИОННАЯ СИСТЕМА | 2008 |
|
RU2389599C2 |
| CN 201804458 U, 20.04.2011 | |||
| DE 19903718 C1, 29.06.2000. | |||

