Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известно устройство вертикального перемещения многофункционального диагностико-хирургического операционного стола с возможностью информационно-компьютерного управления (см. заявку №2011133904, 050213 от 15.08.2011, включающее вертикальный корпус стола с возможностью изменения высоты, который позиционно расположен в его основании, при этом основание стола закреплено на неподвижно поверхности и выполнено в виде цилиндра с внешними ребрами жесткости, внутри которого зафиксирована нижнего часть вертикального корпуса, выполненного в виде двух соосных цилиндров внешнего и внутреннего, с возможностью возвратно-поступательного смещения внутреннего цилиндра, между которыми расположены направляющие в виде двух последовательных колец с полукруглыми пазами, в которых расположены продольные направляющие, закрепленные с внутренней поверхности внешнего цилиндра и внешней поверхности внутреннего цилиндра, при этом в нижней части внешнего цилиндра и на расстоянии от верхней части внутреннего цилиндра зафиксированы вставные шайбы, на противоположных стороне которых выполнены круглые пазы, между которыми располагают линейный привод возвратно-поступательного перемещения внутреннего цилиндра относительно внешнего неподвижного цилиндра (прототип).
Недостатком известного операционного стола является ограничение его функциональных возможностей, поскольку он предназначен для решения конкретной задачи и не включает робототехническую систему с возможностью информационно-компьютерного управления для проведения как хирургических процедур, так и диагностики.
Техническим результатом предложенного изобретения является усовершенствование известного операционного стола с возможностью как вертикального, так и горизонтального перемещения путем позиционного совмещения его с робототехнической системой с возможностью информационно-компьютерного управления для проведения как хирургических процедур, так и диагностики.
Указанный технический результат достигается следующим устройством.
Устройство разворота диагностических и хирургических элементов многофункциональной диагностико-хирургической робототехнической системы операционного стола с возможностью информационно-компьютерного управления, включающее вертикальный корпус с возможностью изменения высоты, который позиционно расположен на основании, которое закреплено на неподвижно поверхности и выполнено в виде цилиндра с внешними ребрами жесткости, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров, внешнего и внутреннего, с возможностью возвратно-поступательного смешения внутреннего цилиндра корпуса относительно внешнего цилиндра корпуса, между которыми расположены направляющие в виде двух последовательных кольца с полукруглыми пазами, в которых расположены продольные направляющие, закрепленные с внутренней поверхности внешнего цилиндра и внешней поверхности внутреннего цилиндра, при этом в нижней части внешнего цилиндра и на расстоянии от верхней части внутреннего цилиндра зафиксированы верхняя и нижняя вставные шайбы, на противоположных стороне которых выполнены круглые пазы, а между ними расположен линейный привод возвратно-поступательного перемещения внутреннего цилиндра относительно внешнего неподвижного цилиндра, при этом на верхней вставной шайбе закреплен привод с редуктором, внешняя шестеренка которого функционально связана с внутренней зубчатой шестеренкой крышки вертикального корпуса. при этом крышка выполнена в нижней части с возможностью разворота внутри внутреннего цилиндра корпуса с возвратно-поступательным смещением, а верхняя часть крышки выполнена по размеру больше, чем диаметр внешнего цилиндра неподвижной части корпуса и расположена над верхней частью внутреннего цилиндра корпуса с возможностью возвратно-поступательного вращения, к которой под углом 120° зафиксированы три устройства индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами и хирургическими робототехническими элементами.
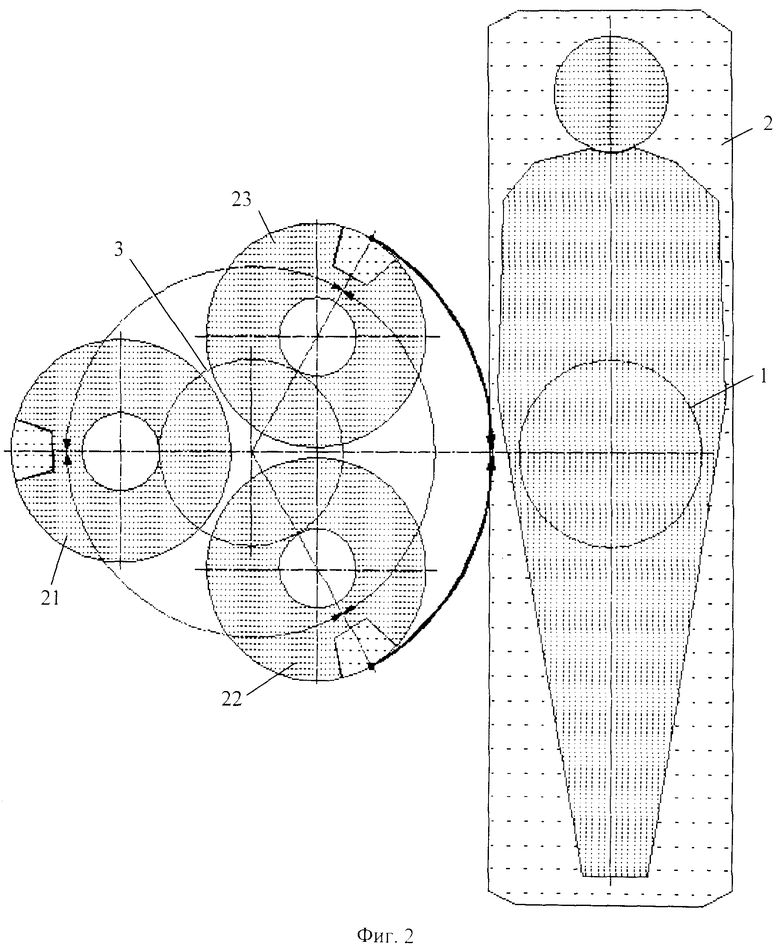
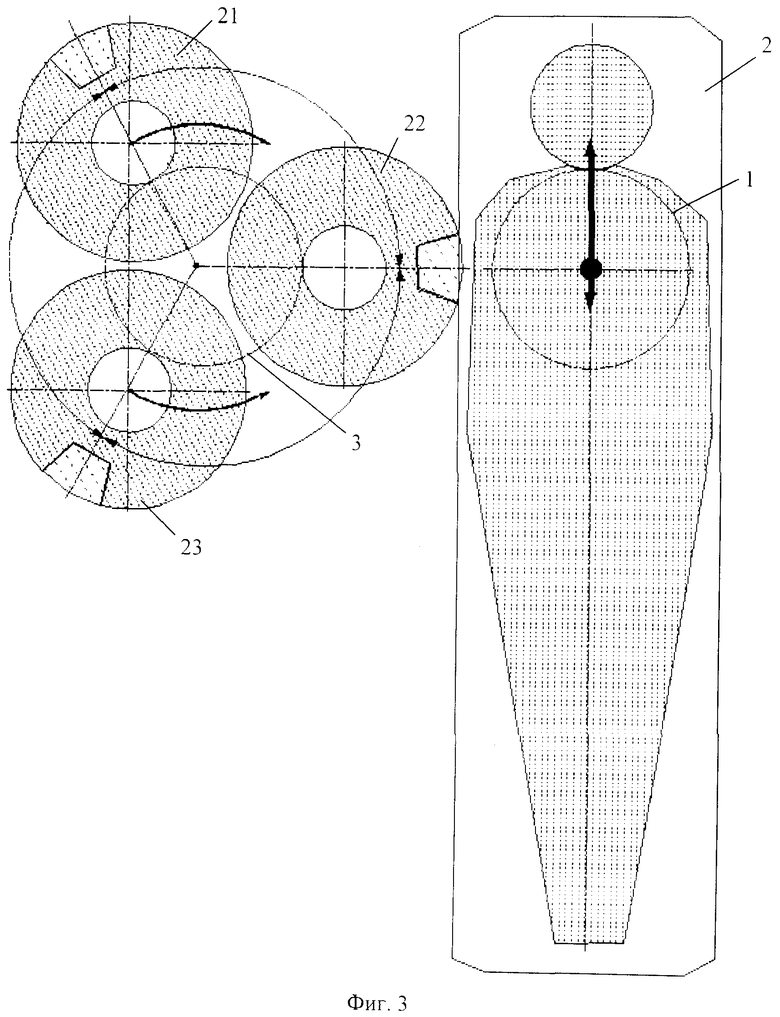
На фиг.1 изображено устройство разворота диагностических и хирургических элементов многофункциональной диагностико-хирургической робототехнической системы операционного стола с возможностью информационно-компьютерного управления. На фиг.2 и 3 изображено позиционное положение трех корпусов с внешней сферической поверхностью для диагностических и хирургических элементов с возможностью разворота и операционный стол с возможностью горизонтального перемещения.
Устройство разворота диагностических и хирургических элементов многофункциональной диагностико-хирургической робототехнической системы операционного стола с возможностью информационно-компьютерного управления включает (Фиг.2) вертикальный корпус 1 хирургического стола 2 с возможностью изменения высоты, а также включает (Фиг.1) вертикальный корпус 3 с возможностью изменения высоты, который позиционно расположен на основании 4, которое закреплено на неподвижной поверхности и выполнено в виде цилиндра 5 с внешними ребрами жесткости 6, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров, внешнего 7 и внутреннего 8, с возможностью возвратно-поступательного смещения внутреннего цилиндра 8 корпуса относительно внешнего цилиндра 7 корпуса, между которыми расположены направляющие в виде двух последовательных кольца 9 и 10 с полукруглыми пазами, в которых расположены продольные направляющие 11, закрепленные с внутренней поверхности (кольца 9 и 10) внешнего цилиндра 7 и внешней поверхности (направляющие 11) внутреннего цилиндра 8, при этом в нижней части внешнего цилиндра 7 и на расстоянии от верхней части внутреннего цилиндра 8 зафиксированы верхняя 12 и нижняя 13 вставные шайбы, на противоположных стороне которых выполнены круглые пазы, а между ними расположен линейный привод 14 возвратно-поступательного перемещения внутреннего цилиндра 8 относительно внешнего неподвижного цилиндра 7, при этом на верхней вставной шайбе 12 закреплен привод с редуктором 15, внешняя шестеренка 16 которого функционально связана с внутренней зубчатой шестеренкой 17 крышки 18 вертикального корпуса 3, при этом крышка 18 выполнена в нижней части 19 с возможностью разворота внутри внутреннего цилиндра 8 корпуса с возвратно-поступательным смещением, а верхняя часть 20 крышки 18 выполнена по размеру больше, чем диаметр внешнего цилиндра 7 неподвижной части корпуса, и расположена над верхней частью внутреннего цилиндра 8 корпуса с возможностью возвратно-поступательного вращения, к которой под углом 120° зафиксированы три устройства 21, 22 и 23 (Фиг.2 и 3) индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами 24 и хирургическими робототехническими элементами.
Устройство разворота диагностических и хирургических элементов многофункциональной диагностико-хирургической робототехнической системы операционного стола с возможностью информационно-компьютерного управления в данном исполнении может быть использовано как для проведения хирургической операции, так и для диагностики. Поскольку хирургический стол 2 (Фиг.2 и 3) с возможностью продольного перемещения позволяет выполнять перемещение операционного стола 2 с пациентом в позиционное положение расположения трех корпусов 21, 22 и 23 с внешней сферической поверхностью для выполнения как диагностических 21 и 22 (рентген, УЗИ), так и хирургических процедур. При этом вертикальный корпус 3 с возможностью изменения высоты закреплен в нижней его части 4, выполненной в виде полого цилиндра 5 с внешними ребрами жесткости 6, и неподвижно расположен на поверхности пола, а в основание стола 4 введен дополнительный полый цилиндр 5 с внешними ребрами жесткости 6. При этом вертикальный корпус 1 (Фиг.1) робототехнической системы с возможностью изменения высоты включает вертикальный корпус 3 с возможностью изменения высоты, который позиционно расположен на основании 4, которое закреплено на неподвижной поверхности и выполнено в виде цилиндра 5 с внешними ребрами жесткости 6, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров, внешнего 7 и внутреннего 8, с возможностью возвратно-поступательного смещения внутреннего цилиндра 8 корпуса относительно внешнего цилиндра 7 корпуса, между которыми расположены направляющие в виде двух последовательных кольца 9 и 10 с полукруглыми пазами, в которых расположены продольные направляющие 11, закрепленные с внутренней поверхности (кольца 9 и 10) внешнего цилиндра 7 и внешней поверхности (направляющие 11) внутреннего цилиндра 8, при этом в нижней части внешнего цилиндра 7 и на расстоянии от верхней части внутреннего цилиндра 8 зафиксированы верхняя 12 и нижняя 13 вставные шайбы, на противоположных стороне которых выполнены круглые пазы, а между ними расположен линейный привод 14 возвратно-поступательного перемещения внутреннего цилиндра 8 относительно внешнего неподвижного цилиндра 7. При этом на верхней вставной шайбе 12 закреплен привод с редуктором 15, внешняя шестеренка 16 которого функционально связана с внутренней зубчатой шестеренкой 17 крышки 18 вертикального корпуса 3, при этом крышка 18 выполнена в нижней части 19 с возможностью разворота внутри внутреннего цилиндра 8 корпуса с возвратно-поступательным смещением. Такая конструкция корпуса 1 робототехнической системы позволяет выполнять подъем трех устройств 21, 22 и 23 (Фиг.2 и 3) индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами 24 и хирургическими робототехническими элементами в том случае, если они имеют своего устройства подъема. А для разворота трех устройств 21, 22 и 23 (Фиг.2 и 3) индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами 24 и хирургическими робототехническими элементами верхняя часть 20 крышки 18 выполнена по размеру больше, чем диаметр внешнего цилиндра 7 неподвижной части корпуса и расположена над верхней частью внутреннего цилиндра 8 корпуса с возможностью возвратно-поступательного вращения, к которой под углом 120° зафиксированы три устройства 21, 22 и 23 (Фиг.2 и 3) индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами 24 и хирургическими робототехническими элементами.
Использование предложенного технического решения позволяет расширить функциональные возможности устройства вертикального перемещения многофункционального дагностико-хиругического операционного стола с возможностью информационно-компьютерного управления путем конструктивного расширения его функциональных возможностей.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Устройство, включающее вертикальный корпус, выполненный в виде двух соосных цилиндров, внешнего и внутреннего, с возможностью возвратно-поступательного смещения внутреннего цилиндра относительно внешнего, при этом в нижней части внешнего цилиндра и на расстоянии от верхней части внутреннего цилиндра зафиксированы верхняя и нижняя вставные шайбы, на противоположных сторонах которых выполнены круглые пазы, а между ними расположен линейный привод возвратно-поступательного перемещения внутреннего цилиндра относительно внешнего неподвижного цилиндра, при этом на верхней вставной шайбе закреплен привод с редуктором, внешняя шестеренка которого функционально связана с внутренней зубчатой шестеренкой крышки вертикального корпуса, при этом крышка выполнена в нижней части с возможностью разворота внутри внутреннего цилиндра корпуса с возвратно-поступательным смещением, а верхняя часть крышки выполнена по размеру больше, чем диаметр внешнего цилиндра неподвижной части корпуса и расположена над верхней частью внутреннего цилиндра корпуса с возможностью возвратно-поступательного вращения, на которой под углом 120° зафиксированы три устройства индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами и хирургическими робототехническими элементами. Изобретение, являясь частью робототехнической системы, позволяет осуществлять как горизонтальные, так и вертикальные перемещения диагностических устройств, при проведении диагностики и хирургических операций. 3 ил.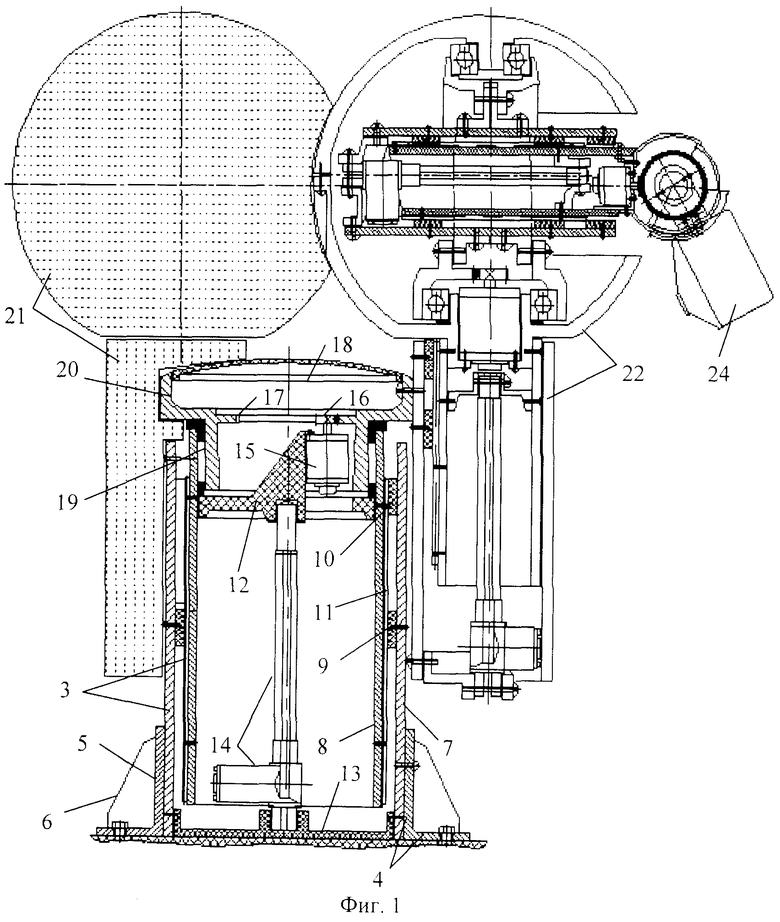
Устройство разворота диагностических и хирургических элементов многофункциональной диагностико-хирургической робототехнической системы операционного стола с возможностью информационно-компьютерного управления, включающее вертикальный корпус с возможностью изменения высоты, который позиционно расположен на основании, которое закреплено на неподвижной поверхности и выполнено в виде цилиндра с внешними ребрами жесткости, внутри которого зафиксирована нижняя часть вертикального корпуса, выполненного в виде двух соосных цилиндров внешнего и внутреннего с возможностью возвратно-поступательного смещения внутреннего цилиндра корпуса относительно внешнего цилиндра корпуса, между которыми расположены направляющие в виде двух последовательных колец с полукруглыми пазами, в которых расположены продольные направляющие, закрепленные с внутренней поверхности внешнего цилиндра и внешней поверхности внутреннего цилиндра, при этом в нижней части внешнего цилиндра и на расстоянии от верхней части внутреннего цилиндра зафиксированы верхняя и нижняя вставные шайбы, на противоположных сторонах которых выполнены круглые пазы, а между ними расположен линейный привод возвратно поступательного перемещения внутреннего цилиндра относительно внешнего неподвижного цилиндра, отличающееся тем, что на верхней вставной шайбе закреплен привод с редуктором, внешняя шестеренка которого функционально связана с внутренней зубчатой шестеренкой крышки вертикального корпуса, при этом крышка выполнена в нижней части с возможностью разворота внутри внутреннего цилиндра корпуса с возвратно-поступательным смещением, а верхняя часть крышки выполнена по размеру больше, чем диаметр внешнего цилиндра неподвижной части корпуса и расположена над верхней частью внутреннего цилиндра корпуса с возможностью возвратно-поступательного вращения, к которой под углом 120° зафиксированы три устройства индивидуального подъема корпусов со сферической внешней поверхностью с диагностическими элементами и хирургическими робототехническими элементами.
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МАНИПУЛЯЦИОННАЯ СИСТЕМА | 2008 |
|
RU2389599C2 |
| US 6113343 A, 05.09.2000 | |||
| WO 1997010079 A1, 20.03.1997. | |||

