Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления торможением рабочего транспортного средства в соответствии с вводной частью пункта 1. Изобретение также относится к системе для управления торможением рабочего транспортного средства и рабочему транспортному средству, включающему в себя такую систему.
Уровень техники
Транспортные средства для тяжелых работ, например, для погрузочных работ в шахтах под землей, во время работы подвержены воздействию неровных и изменяющихся грунтов. В этих условиях грунты часто имеют плохую проходимость из-за воды, грязи, гравия и др., которая приводит к низкому трению для транспортного средства. Проходы с перепадами по высоте, которые проходят с большими нагрузками, предъявляют повышенные требования к приводной системе привода и тормозной системе. Вследствие высоких производственных требований существуют одновременно высокие требования к эксплуатационному сроку службы рабочего транспортного средства, а также к маневренности, например, относительно движения по криволинейным траекториям и коротких тормозных путей.
Рабочими транспортными средствами в соответствии с настоящим изобретением являются часто, но не только, подземные транспортные средства с поворотным шарниром посередине, содержащие, по меньшей мере, одну переднюю и одну заднюю колесную ось. Передняя и задняя колесная ось приводятся в движение посредством дифференциала. Данные транспортные средства способны двигаться в узких галереях и по криволинейным траекториям с малыми радиусами кривизны. Кроме того, данные транспортные средства подвержены воздействию больших нагрузок, высокой тяговой мощности и быстрых замедлений/ускорений с высокими, но резко изменяющимися нагрузками на колеса.
Проскальзывание покрышек, помимо ограниченной грузоподъемности, также увеличивает риск износа покрышек и риск повреждения покрышек, поскольку они дополнительно подвергаются повреждениям, вызванным острыми камнями от взрывов и др.
Патент США 5865512 описывает систему управления, в которой приводные колеса являются управляемыми, а буксующие колеса - заторможенными до уровня, который обеспечивает более эффективный приводной контакт с землей.
Цель и наиболее важные признаки изобретения
Целью настоящего изобретения является создание способа управления торможением рабочего транспортного средства, в котором предусмотрено усовершенствование по сравнению с известным уровнем техники.
Данная цель достигается в соответствии с изобретением посредством того, что, по меньшей мере, одна реальная величина регистрируется или вычисляется для, по меньшей мере, одной переменной состояния, влияющей на транспортное средство, которая является характеристикой паразитного крутящего момента, возникающего в трансмиссии транспортного средства во время торможения, и исходя из упомянутой реальной величины, осуществляется управление, по меньшей мере, одним тормозным узлом для уменьшения величины приложенного тормозного усилия и, таким образом, для уменьшения паразитного крутящего момента.
Данный способ имеет большое преимущество в тех рабочих условиях, в которых существует риск так называемого "паразитного крутящего момента", например, если машина, тяжело нагруженная спереди с легко нагруженными задними колесами, движется под уклон и/или с буксующими колесами из-за скользкого грунта.
Например, если тяжело нагруженное транспортное средство с передним ковшом затормозит на спуске, то очень большая часть веса транспортного средства ложится на передние колеса, тогда как задние колеса принимают на себя значительно меньшую часть нагрузки, если вообще принимают. Поэтому данные колеса не способны передавать сколько-нибудь значительное тормозное усилие на грунт.
Необходимо отметить, что при использовании в данном документе термина "исходя из реальной величины" необходимо также иметь в виду, что управление соответствующим тормозным узлом осуществляется после предварительного преобразования, передачи, сравнения и другой обработки реальной величины прежде, чем она используется для управления.
Ранее известное рабочее транспортное средство не содержит дифференциала между передней и задней частями тяговой (карданной) оси. Причина этого состоит в том, что такой (карданный) дифференциал требует высоких затрат и нежелательного большого пространства. Поскольку он также оказывает неблагоприятное воздействие на тормозную способность и движущую способность транспортного средства, такой элемент является нежелательным в данном типе транспортного средства. Вместо него поворотный жесткий универсальный шарнир или карданный шарнир размещается на тяговой оси рядом с рулевым шарниром транспортного средства. Таким образом, во время движения, а также торможения такого транспортного средства, передняя колесная ось и задняя колесная ось будут приводиться в движение с одинаковой скоростью вращения. Это приводит к тому, что во время упомянутой операции торможения, когда задние колеса не находятся в положении передачи сколько-нибудь значительной тормозной мощности на землю, задние тормозные узлы, связанные с данными колесами, будут приводиться во вращение передними колесами посредством всех элементов трансмиссии между ними, и данные задние тормозные узлы будут способствовать торможению передних колес. В результате этого в трансмиссии будут возникать большие внутренние, называемые в данном документе паразитными, крутящие моменты, которые перенапрягают редукторный механизм ступицы, дифференциал колесных осей и элементы тяговой оси.
Внутренний/паразитный крутящий момент представляет собой дополнительный крутящий момент в тяговой системе, которая передает мощность, т.е. крутящий момент, от первой колесной оси ко второй колесной оси. Это превышает идеальное условие, при котором передняя часть тяговой оси, соединенная с передней осью, и задняя часть, соединенная с задней осью, имеют одинаковый крутящий момент и направление, которое определяется, исходя из того, что крутящий момент является тяговым или тормозящим (т.е. что, например, тяговый крутящий момент от двигателя распределяется приблизительно поровну между передней и задней осью). Типичным случаем является резкое торможение, когда задние колеса вследствие низкого трения с землей приводятся во вращение не посредством контакта между колесами и землей, а посредством тяговой оси. Крутящий момент, который заторможен задними колесами, в данном случае передается от земли на передние колеса и назад по всей тяговой системе в тормоза, расположенные у задних колес.
Используя данное изобретение, можно уменьшить тормозную мощность, которая воздействует на колеса, которые являются легко нагруженными около земли и даже "поднятыми колесами", и торможение транспортного средства будет в основном применяться к колесам, которые принимают на себя подавляющую часть веса нагруженного транспортного средства. При этом паразитный крутящий момент в трансмиссии уменьшается, и оси и тяговые оси, а также промежуточные обычные дифференциалы и др., будут защищены от вредной нагрузки, которая в противном случае будет возникать.
На практике распределение тормозного усилия может зависеть в большей или меньшей степени (например, в пропорциональной зависимости) от имеющейся нагрузки на конкретное колесо или конкретную колесную ось.
К соответствующим колесам, предпочтительно, прикладываются тормозные мощности, которые, предпочтительно, измеряются так, что тормозные мощности являются функциями нагрузки, имеющейся в данный момент на соответствующей оси. Предпочтительно, при нагрузке на определенную ось ниже такого уровня, тормозная мощность не прикладывается к колесам на данной оси.
Распределение тормозных мощностей, предпочтительно, вычисляется исходя из, по меньшей мере, любой переменной состояния из группы, включающей в себя нагрузку в ковше, угол наклона рабочего транспортного средства относительно горизонтальной плоскости, крутящий момент, передаваемый в трансмиссии, скручивание элемента, являющегося частью трансмиссии, нагрузку, которой подвергается каждая одна из упомянутых, по меньшей мере, двух колесных осей, силы ускорения и замедления, влияющие на рабочее транспортное средство.
При этом нагрузку в ковше можно вычислять или регистрировать посредством любого по сути известного способа, включающего измерение деформации посредством, например, тензометрических датчиков на несущем рычаге, гидравлического давления в подъемном цилиндре и др.
Угол наклона рабочего транспортного средства относительно горизонтальной плоскости можно регистрировать посредством инклинометра.
Крутящий момент, передаваемый в трансмиссии, можно вычислять непосредственно при помощи датчиков крутящего момента в трансмиссии или опосредованно при помощи, например, тензометрических датчиков для измерения скручивания элемента в трансмиссии.
Нагрузку, которой подвергается каждая одна из упомянутых, по меньшей мере, двух колесных осей, можно регистрировать при помощи элементов определения нагрузки, размещаемых в подвеске, или опосредованно вычислять через имеющуюся в наличии информацию о нагрузке в ковше, весе транспортного средства и др.
Силы ускорения и замедления, влияющие на рабочее транспортное средство, можно регистрировать или оценивать при помощи акселерометров в сочетании с данными о весе.
Если переменная состояния выбрана из группы, включающей в себя нагрузку, которой подвергается каждая одна из упомянутых колесных осей, нагрузку в ковше, для соответствующего колеса, предпочтительно, применяются тормозные нагрузки, которые измеряются так, что тормозные усилия являются функциями вычисленной или измеренной нагрузки в данный момент. Если это относится к нагрузке, которой подвергается каждая одна из упомянутых, по меньшей мере, двух колесных осей, то тормозные нагрузки являются функциями нагрузки на соответствующую ось в данный момент. Это обеспечивает простое вычисление и управление системой в соответствии с изобретением.
Если переменная состояния выбрана из группы, включающей в себя угол наклона рабочего транспортного средства относительно горизонтальной плоскости, силы ускорения и замедления, влияющие на рабочее транспортное средство, для соответствующего колеса, предпочтительно, применяются тормозные усилия, которые измеряются так, что тормозные усилия являются функциями вычисленной или измеренной реальной величины.
При некоторых условиях допустимо и предпочтительно осуществлять соответствующим образом вычисление требуемой величины в соответствии с реальной величиной для переменной состояния, исходя из требуемой работы транспортного средства, в которой паразитный крутящий момент находится ниже определенного уровня. Затем реальная величина и требуемая величина сравниваются для получения характеристики, описывающей отклонение, и осуществляется управление, по меньшей мере, одним тормозным узлом в отношении величины прикладываемого тормозного усилия для уменьшения отклонения, и тем самым уменьшения паразитного крутящего момента. Это особенно предпочтительно, когда переменная состояния выбрана из группы, включающей в себя крутящий момент, передаваемый в трансмиссии, скручивание элемента в трансмиссии. В соответствии с данным аспектом требуемая величина определяется как переданный крутящий момент относительно скручивания элемента в трансмиссии, которое является допустимым.
Важные преимущества данного изобретения заключаются в увеличении срока службы важных элементов рабочего транспортного средства, уменьшении размеров данных элементов и увеличении управляемости во время торможения. Таким образом, улучшается суммарная экономия и производительность транспортного средства.
Изобретение также относится к системе управления торможением рабочего транспортного средства с приводным двигателем, содержащего колеса и шарнир посередине, и рабочему транспортному средству, включающему в себя систему в соответствии с вышеописанным.
Преимущества, соответствующие признакам способа, обеспечиваются посредством соответствующих признаков устройств.
Краткое описание чертежей
Ниже данное изобретение будет описано в виде вариантов осуществления на основе чертежей, на которых показано следующее:
фиг.1 схематично изображает рабочее транспортное средство в соответствии с изобретением, стоящее на земле,
фиг.2 схематично изображает элементы привода рабочего транспортного средства в соответствии с фиг.1,
фиг.3 схематично изображает рабочее транспортное средство в соответствии с фиг.1 в рабочем положении,
фиг.4 схематично изображает блок-схему последовательности операций способа в соответствии с изобретением.
Описание вариантов осуществления изобретения
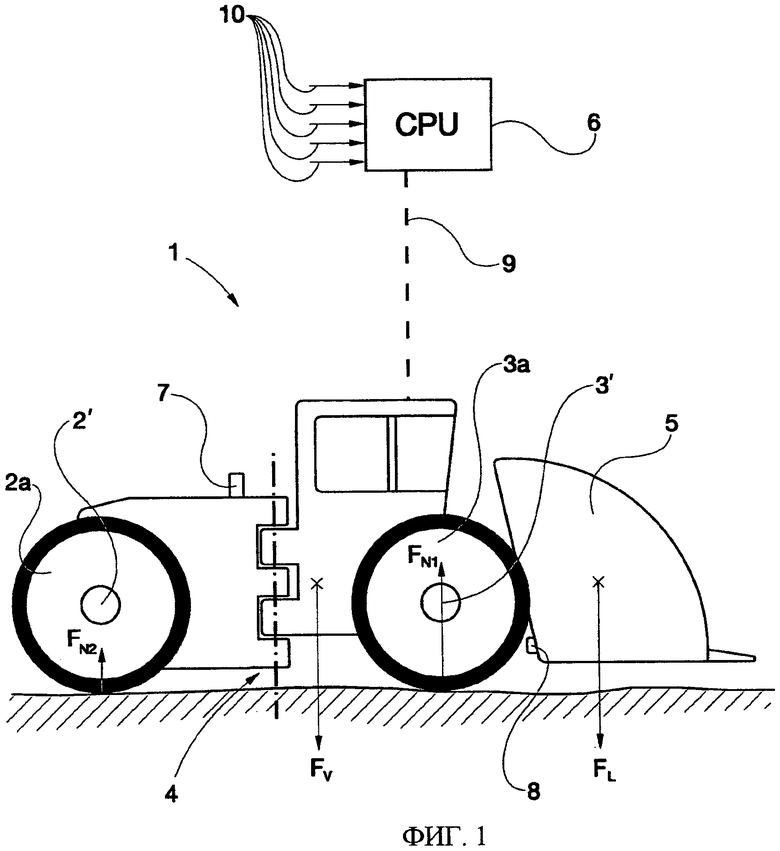
На фиг.1 показано рабочее транспортное средство 1 с шарниром посередине и колесами, предназначенное для погрузочных работ в подземных условиях, в галереях, туннелях и т.п. Рабочее транспортное средство 1 содержит передние и задние колеса, причем заднее колесо 2а имеет заднюю колесную ось 2'. Переднее колесо 3а имеет переднюю колесную ось 3'. Транспортное средство содержит рулевой шарнир 4, расположенный в центре, с вертикальной осью.
Рабочее транспортное средство 1 содержит относительно очень большой погрузочный ковш 5 для погрузки камня от взрыва, разрушенной руды и т.п. Управление рабочим транспортным средством осуществляется посредством блока 6 управления или центрального пульта управления, который содержит шину 9 управления для связи с различными функциями в транспортном средстве. Сигналы, поступающие из различных датчиков и из элементов, на которые воздействует водитель, приходят на входы 10 блока управления.
В частности, на фиг.4 показан акселерометр 7, который регистрирует ускорения и замедления, которым подвергается транспортное средство во время работы, и датчик 8 нагрузки для регистрации нагрузки в погрузочном ковше 5.
На фиг.1 дополнительно проиллюстрированы некоторые из сил, влияющих на транспортное средство, а именно FV, которая представляет собой компонент силы тяжести транспортного средства, FL, которая представляет собой компонент силы тяжести возможной нагрузки, FN1, которая представляет собой нормальную силу, действующую на правое переднее колесо 3а, и FN2, которая представляет собой нормальную силу, действующую на правое заднее колесо 2а. В теоретическом симметричном положении соответствующие нормальные силы, действующие на левые (не показанные) колеса, являются такими же попарно.
На фиг.2 приводные элементы рабочего транспортного средства 1 показаны с механизмом 13 силовой передачи, который передает тяговую мощность от двигателя (не показанного) на тяговую (карданную) ось 11. Около рулевого шарнира (фиг.1) тяговая ось 11 содержит поворотный жесткий карданный шарнир 12, что означает, что передняя часть 11'' тяговой оси 11, также как и задняя часть 11' тяговой оси 11 вращаются синхронно друг с другом.
Передняя часть 11' тяговой оси 11 посредством переднего дифференциала 14 соединена с передней колесной осью 20, которая в свою очередь приводит в движение оба передних колеса 3а и 3b. Задняя часть 11'' тяговой оси 11 посредством заднего дифференциала 15 приводит в движение заднюю колесную ось 21, которая в свою очередь приводит в движение оба задних колеса 2а и 2b.
С каждым колесом соединен тормозной узел 16-19 с отдельным приводом. Датчики 22а-d соединены с каждым одним из колес для передачи сигнала, характеризующего скорость вращения каждого колеса.
Каждый датчик 22а-d связан с блоком 6 управления, который также связан с или включает в себя схему 23 управления для управления тормозами, способную создавать сигналы для отдельного приведения в действие каждого тормозного узла 16-19.
На фиг.2 показано, что рабочее транспортное средство 1 с диапазоном рулевого управления, который может быть максимальным диапазоном рулевого управления, имеет естественный центр SN поворота. Это означает, что при нормальном движении по нормальному грунту и при показанном диапазоне рулевого управления транспортное средство 11 будет поворачиваться вокруг точки SN с радиусом поворота R.
Скорость транспортного средства может быть вычислена или измерена посредством одного, по сути известного, не проиллюстрированного устройства. Угловой датчик 24 расположен около рулевого шарнира.
При использовании транспортного средства, а также когда оно находится в неподвижном состоянии, транспортное средство подвергается воздействию ряда различных сил и противодействующих сил в равновесии. Такими силами являются, например, гравитационная сила, динамические массовые силы и другие. Противодействующие силы действуют на точки контакта между транспортным средством и землей: на колеса и на другие возможные точки контакта с землей, например, через ковш.
Во время статического равновесия транспортное средство движется с заданной скоростью в заданном направлении с заданной угловой скоростью.
Вследствие того, что тяговая ось содержит поворотный жесткий шарнир около рулевого шарнира и, таким образом, колесные оси вращаются синхронно, в некоторых условиях эксплуатации, таких как указано выше, может возникать паразитный крутящий момент, например, в тяжело нагруженной спереди машине с легко нагруженными задними колесами. Кроме торможения тяжело нагруженного транспортного средства на склоне, когда очень большая часть веса транспортного средства ложится на передние колеса, паразитные моменты могут преимущественно возникать во время каждого торможения, когда может происходить дифференцированная передача тормозного усилия от разных колес на землю. Это имеет наибольшее значение, когда какое-либо из колес колесной оси имеет более низкое трение с землей и особенно когда это относится к менее нагруженной колесной оси.
В свою очередь максимально возможная сила трения в каждом колесе статически и динамически зависит от вертикальной нормальной силы, помноженной на коэффициент трения между покрышкой и землей. Как вертикальная сила, так и коэффициент трения сильно изменяются. Например, вертикальная сила зависит от угла наклона транспортного средства, ускорения транспортного средства и статической нагрузки на колеса, которая возникает от полностью загруженного или даже пустого ковша и др.
В ряде реальных случаев нагружения вертикальная сила в одном колесе может приближаться к нулю или даже быть равной нулю. В то же время коэффициент трения очень сильно изменяется в зависимости от грунта, на котором используется данное транспортное средство.
Изобретение относится не только к способу двухпозиционного регулирования, но и к непрерывному регулируемому увеличению/уменьшению тормозной мощности для непрерывного уменьшения также и незначительных паразитных крутящих моментов. Транспортное средство может приводиться в движение электрическим или дизельным двигателем или любым другим способом и содержать две или более колесные оси. Рабочее транспортное средство может также содержать тормоз/блокировку дифференциала.
Как показано на фиг.2, система включает в себя схему 25 состояния для регистрации или вычисления, по меньшей мере, одной реальной величины или, по меньшей мере, одной переменной состояния, влияющей на транспортное средство, предпочтительно вычислительный/задающий блок 26 для вычисления/задания требуемой величины, соответствующей упомянутой реальной величине, исходя из требуемой работы транспортного средства, кроме того, столь же предпочтительно, сравнивающий блок 27 для сравнения реальной величины и требуемой величины для получения характеристики, описывающей отклонение, и схему 23 управления для управления, по меньшей мере, одним тормозным узлом в отношении величины приложенного тормозного усилия. Схема состояния, вычислительный блок, сравнивающий блок и схема управления являются соответственно составными частями блока управления, но могут быть также взаимосвязанными отдельными блоками, такими как показано на фиг.2.
На фиг.3 показано рабочее транспортное средство, движущееся вниз по дороге с уклоном под углом V. Силы, действующие на данное транспортное средство, такие же, как показано на фиг.1, за исключением того, что задние колеса 2а, 2b почти не имеют контакта с землей и поэтому подвергаются воздействию только небольшой нормальной силы. Таким образом, практически все возможное тормозное усилие должно приходиться на передние колеса 3а, 3b.
При таком условии эксплуатации в отношении торможения рабочего транспортного средства в соответствии с известным уровнем техники происходит то, что к задним тормозным узлам и к передним тормозным узлам будут прикладываться тормозные усилия. Поскольку задняя колесная ось приводится во вращение передними колесами, которые находятся на земле, вследствие торможения задних колес паразитный крутящий момент будет возникать в трансмиссии, на всем протяжении вплоть до (фиг.2) тормозных узлов 16, 17, через колесную ось 21, дифференциал 15, заднюю часть тяговой оси 11'', карданный шарнир 12, переднюю часть тяговой оси 11', дифференциал 14 и колесную ось 20. Все данные элементы (и возможно также и другие) будут находиться под воздействием данного паразитного крутящего момента. В соответствии с изобретением, вместо этого соответствующее тормозное усилие будет прикладываться к передним тормозным узлам 18, 19, а тормозное усилие на задних тормозных узлах 16, 17 будет уменьшено, вследствие чего паразитный крутящий момент соответственно уменьшается или даже становится равным нулю.
Фиг.4 изображает блок-схему последовательности операций способа в соответствии с изобретением. Способ содержит начальную стадию 28, стадию 29 регистрации или вычисления (по меньшей мере) одной реальной величины или переменной состояния, такой как крутящий момент, передаваемый в трансмиссии, стадию 30 сравнения реальной величины с заранее установленной требуемой величиной для данного условия эксплуатации, для получения характеристики, описывающей отклонение, стадию 31 передачи характеристики отклонения в схему управления, которая в том случае если отклонение превышает некоторую заранее установленную величину, осуществляет управление задними тормозными узлами для уменьшения тормозного усилия. Способ содержит стадию 32 возврата к стадии 29 и конечную стадию 33. Предпочтительно, в вычислениях учитывается несколько переменных состояния. Например, нагрузка в ковше и угол наклона рабочего транспортного средства 1 относительно горизонтальной плоскости или крутящий момент, передаваемый в трансмиссии.
В некоторых условиях эксплуатации уровень нагрузки в данный момент и трение между колесом и землей обеспечивает относительно приемлемый уровень паразитного крутящего момента, который вводится в трансмиссию также без использования данного изобретения. Это может иметь место при меньших нагрузках, при движении вверх, при сухом грунте и т.д. Однако данное изобретение применимо также и в таких условиях эксплуатации, эффективно распределяя приводные усилия между колесными осями и, тем самым, уменьшая износ трансмиссии.
Нагрузку, которой подвергаются колесные оси, можно регистрировать или вычислять так же, как описано выше, в отношении силы, передаваемой от колес. Приложенную тормозную мощность для соответствующего колеса можно вычислить, исходя из величины давления в гидравлической схеме.
Указанные переменные можно регистрировать или вычислять просто и эффективно по затратам.
Не исключено, что в качестве основания для вычисления также учитывается, по меньшей мере, любое из группы, включающей в себя пробуксовку каждого колеса в данный момент, размер покрышки, износ покрышки, что обеспечивает усиленную позицию для управления. При нагрузке на определенную ось 20, 21 ниже определенного уровня оно может осуществляться таким образом, что тормозное усилие не применяется для колес 2а, 2b, 3a, 3b на данной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧАЯ МАШИНА | 2006 |
|
RU2403348C2 |
| ГИБРИДНАЯ ЭЛЕКТРИЧЕСКАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2490161C2 |
| ТРАНСМИССИЯ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2462371C2 |
| РАБОЧАЯ МАШИНА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2005 |
|
RU2388643C2 |
| СПОСОБ И СИСТЕМА ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2514617C2 |
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |
| Быстроходный двухосный колёсный вездеход на шинах сверхнизкого давления с комбинированной системой управления | 2017 |
|
RU2652936C1 |
| ТОРМОЗНАЯ СИСТЕМА И СПОСОБ ТОРМОЖЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2500556C2 |
| ДВУХГУСЕНИЧНЫЙ ТРАКТОР | 2013 |
|
RU2607932C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ИНСТРУКЦИЯМИ ПО ЭКСПЛУАТАЦИИ ВОДИТЕЛЯ РАБОЧЕЙ МАШИНЫ | 2008 |
|
RU2488663C2 |


Изобретение относится к системам управления тормозами транспортных средств и предназначено для регулирования тормозного усилия в тормозных узлах передних и задних колес. Транспортное средство (1) содержит систему для управления торможением рабочего транспортного средства (1). При управлении торможением одна реальная величина регистрируется или вычисляется для одной переменной состояния, влияющей на транспортное средство (1), которая является характеристикой паразитного крутящего момента, возникающего в трансмиссии транспортного средства во время торможения. Исходя из реальной величины, осуществляется управление, по меньшей мере, одним тормозным узлом (16-19) для уменьшения величины приложенного тормозного усилия. Достигается повышение надежности, износоустойчивости, уменьшение паразитного крутящего момента. 3 н. и 10 з.п. ф-лы, 4 ил.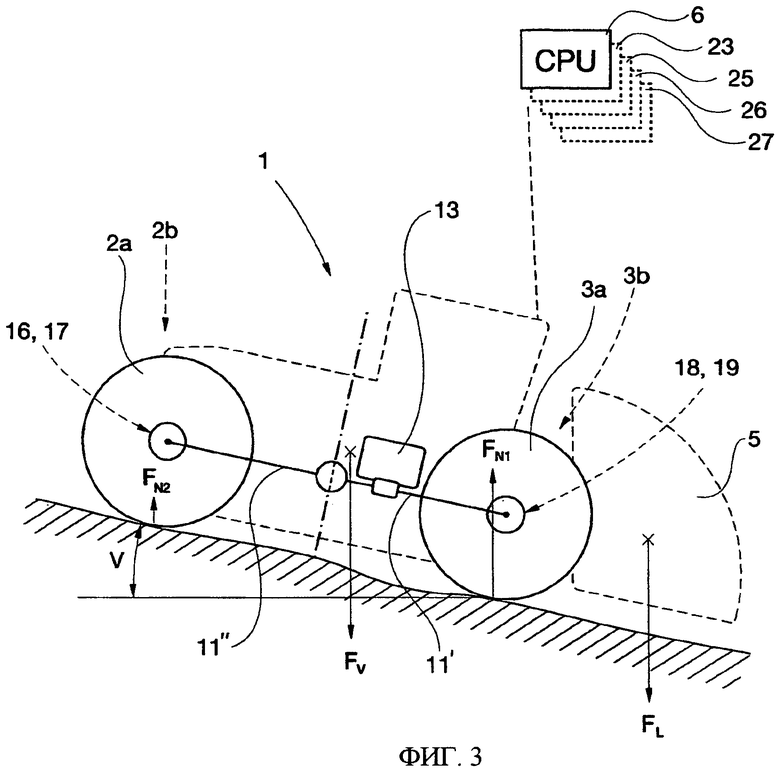
1. Способ управления торможением рабочего транспортного средства (1) с шарниром посередине, приводимого двигателем, содержащего колеса и рулевой шарнир (4), выполненного в виде ковшового погрузчика и содержащего погрузочный ковш и, по меньшей мере, две колесные оси, причем транспортное средство содержит приводимые в действие по отдельности тормозные узлы (16-19) для каждого одного из колес (2а, 2b, 3а, 3b) и трансмиссию, включающую в себя приводной механизм (13) для передачи крутящего момента на тяговую ось (11) между колесными осями (20, 21), и дифференциал (14, 15) между тяговой осью и каждой колесной осью, и поворотный жесткий карданный шарнир в области рулевого шарнира, отличающийся тем, что, по меньшей мере, одна реальная величина регистрируется или вычисляется для, по меньшей мере, одной переменной состояния, влияющей на транспортное средство, которая является характеристикой паразитного крутящего момента, возникающего в трансмиссии транспортного средства во время торможения, и, исходя из реальной величины, осуществляется управление, по меньшей мере, одним тормозным узлом (16-19) для уменьшения величины приложенного тормозного усилия и, таким образом, для уменьшения паразитного крутящего момента.
2. Способ по п.1, отличающийся тем, что переменная состояния выбрана из группы, включающей в себя нагрузку в ковше, угол наклона рабочего транспортного средства (1) относительно горизонтальной плоскости, крутящий момент, передаваемый в трансмиссии, скручивание элемента, являющегося частью трансмиссии, нагрузку, которой подвергается каждая одна из, по меньшей мере, двух колесных осей (20, 21), силы ускорения и замедления, влияющие на рабочее транспортное средство (1).
3. Способ по п.2, отличающийся тем, что переменная состояния выбрана из группы, включающей в себя нагрузку, которой подвергается каждая одна из, по меньшей мере, двух колесных осей (20, 21), нагрузку в ковше, и к соответствующим колесам (2а, 2b, 3а, 3b) прикладываются тормозные усилия, которые измеряются так, что тормозные усилия являются функциями вычисленной или измеренной нагрузки в данный момент.
4. Способ по п.2, отличающийся тем, что переменная состояния выбрана из группы, включающей в себя угол наклона рабочего транспортного средства (1) относительно горизонтальной плоскости, силы ускорения и замедления, влияющие на рабочее транспортное средство (1), и к соответствующему колесу (2а, 2b, 3а, 3b) прикладываются тормозные усилия, которые измеряются так, что тормозные усилия являются функциями вычисленной или измеренной реальной величины.
5. Способ по п.2, отличающийся тем, что требуемая величина, соответствующая реальной величине, устанавливается или вычисляется исходя из требуемой работы транспортного средства (1), в которой паразитный крутящий момент ниже определенного уровня, реальная величина и требуемая величина сравниваются для получения характеристики, описывающей отклонение, и осуществляется управление, по меньшей мере, одним тормозным узлом (16-19) в отношении величины приложенного усилия для уменьшения отклонения и, таким образом, уменьшения паразитного крутящего момента.
6. Способ по п.5, в котором переменная состояния выбрана из группы, включающей в себя крутящий момент, передаваемый в трансмиссию, скручивание элемента в трансмиссии.
7. Система для управления торможением рабочего транспортного средства (1) с шарниром посередине, приводимого двигателем, содержащего колеса и рулевой шарнир (4), выполненного в виде ковшового погрузчика с, по меньшей мере, двумя колесными осями и погрузочным ковшом, причем транспортное средство содержит приводимые в действие по отдельности тормозные узлы (16-19) для каждого одного из колес (2а, 2b, 3а, 3b) и трансмиссию, включающую в себя приводной механизм (13) для передачи крутящего момента на тяговую ось (11) между колесными осями (20, 21) с дифференциалом (15) между тяговой осью и каждой одной из колесных осей и поворотным жестким карданным шарниром в области рулевого шарнира, отличающаяся тем, что содержит схему состояния для регистрации или вычисления, по меньшей мере, одной реальной величины для, по меньшей мере, одной переменной состояния, влияющей на транспортное средство, которая является характеристикой паразитного крутящего момента, возникающего в трансмиссии транспортного средства во время торможения, и схему управления для управления, исходя из реальной величины, по меньшей мере, одним тормозным узлом (16-19) для уменьшения величины приложенного тормозного усилия и, таким образом, уменьшения паразитного крутящего момента.
8. Система по п.7, отличающаяся тем, что схема состояния выполнена с возможностью регистрировать или вычислять реальную величину для любой переменной состояния, выбранной из группы, включающей в себя нагрузку в ковше, угол наклона рабочего транспортного средства (1) относительно горизонтальной плоскости, крутящий момент, передаваемый в трансмиссии, скручивание элемента в трансмиссии, нагрузку, которой подвергается каждая одна из, по меньшей мере, двух колесных осей (20, 21), силы ускорения и замедления, влияющие на рабочее транспортное средство (1).
9. Система по п.8, отличающаяся тем, что переменная состояния выбрана из группы, включающей в себя нагрузку, которой подвергается каждая одна из, по меньшей мере, двух колесных осей (20, 21), нагрузку в ковше, и схема управления выполнена с возможностью управления соответствующим тормозным узлом таким образом, что для соответствующего колеса (2а, 2b, 3а, 3b) применяются тормозные усилия, которые вычисляются таким образом, что тормозные усилия являются функциями вычисленной или измеренной нагрузки в данный момент.
10. Система по п.8, отличающаяся тем, что переменная состояния выбрана из группы, включающей в себя угол наклона рабочего транспортного средства (1) относительно горизонтальной плоскости, силы ускорения и замедления, влияющие на рабочее транспортное средство (1), и схема управления выполнена с возможностью управления соответствующим тормозным узлом таким образом, что для соответствующего колеса (2а, 2b, 3а, 3b) применяются тормозные усилия, которые измеряются так, что тормозные усилия являются функциями вычисленной или зарегистрированной реальной величины.
11. Система по п.8, отличающаяся тем, что содержит вычислительный/задающий блок для задания или вычисления требуемой величины, соответствующей реальной величине, исходя из требуемой работы транспортного средства (1), в которой паразитный крутящий момент ниже определенного уровня, сравнивающий блок для сравнения реальной величины и требуемой величины и для получения характеристики, описывающей отклонение и схему управления, выполненную с возможностью управления, по меньшей мере, одним тормозным блоком (16-19) в отношении величины приложенного тормозного усилия для уменьшения отклонения и, таким образом, уменьшения паразитного крутящего момента.
12. Система по п.11, в которой переменная состояния выбрана из группы, включающей в себя крутящий момент, передаваемый в трансмиссии, скручивание элемента в трансмиссии.
13. Рабочее транспортное средство, содержащее систему в соответствии с любым из пп.7-12.
| US 5865512 A, 02.02.1999 | |||
| Устройство для регулирования силы торможения транспортного средства | 1977 |
|
SU867288A3 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2405693C1 |

