Настоящее изобретение относится к способу управления торможением транспортного средства, которое содержит контур, предназначенный для передачи сигнала торможения с помощью тормозной текучей среды от органа управления торможением оператором в тормозные устройства, расположенные в элементах транспортного средства, взаимодействующих с поверхностью земли. Изобретение относится также к соответствующей системе.
Изобретение в особенности относится к системе, в которой орган управления торможением оператором (например, педаль тормоза) при нажатии действует на клапан и, соответственно, напрямую воздействует на тормозные устройства посредством тормозной текучей среды. Рабочие машины, такие как автомобили-самосвалы и в особенности шарнирно-сочлененные самосвалы (самосвалы с поворотными кузовами), снабжены системами, в которых тормозные устройства (колесные тормоза) работают с использованием гидравлического контура.
Изобретение описывается ниже на примере шарнирно-сочлененного самосвала. Однако этот пример должен рассматриваться в качестве не ограничивающего варианта применения изобретения, поскольку оно может применяться и в других типах рабочих машин, таких как вильчатые погрузчики или другие типы транспортных средств, таких как тяжелые грузовики.
В шарнирно-сочлененном самосвале между его передней и задней рамами имеется шарнирное соединение, обеспечивающее возможность поворота рам относительно друг друга вокруг продольной оси самосвала. Такой шарнир позволяет существенно улучшить характеристики движения по неровной поверхности. Шарнирно-сочлененный самосвал обычно имеет шесть колес. Ось передних колес расположена на передней раме, а две оси кузова расположены на задней раме.
В связи с транспортировкой тяжелых грузов, например, при выполнении строительных работ, машины типа шарнирно-сочлененных самосвалов используются довольно часто. Такие транспортные средства могут перевозить большие и тяжелые грузы в тех областях, где отсутствуют дороги, например, для транспортировки грузов в связи со строительством дороги или туннеля, в песчаных карьерах, в шахтах и в аналогичных условиях. Шарнирно-сочлененный самосвал имеет несколько тормозных подсистем.
Основная тормозная подсистема содержит колесные тормоза, для каждого колеса используется отдельное тормозное устройство. Обычно используются дисковые колесные тормоза. Вспомогательная тормозная подсистема состоит из одного или нескольких вспомогательных тормозов, обеспечивающих управление движением (замедление) транспортного средства в дополнение к колесным тормозам. Более конкретно, каждый вспомогательный тормоз обеспечивает замедление вращения одного из элементов силовой передачи транспортного средства.
Вспомогательный тормоз может быть тормозом двигателя и/или тормозом трансмиссии, который называется тормозом-замедлителем в автоматической коробке передач. Тормоз двигателя может быть тормозом-замедлителем, встроенным в систему сжатия и/или выпуска отработавших газов двигателя.
Тормоз-замедлитель трансмиссии может быть гидравлическим тормозом, который работает внутри коробки передач. Тормоз-замедлитель может обеспечивать замедление потока для торможения трансмиссии на выходе относительно закрепленной или неподвижной части. Включение и выключение тормоза-замедлителя может выполняться путем заполнения и опорожнения гидравлического тормоза. Кроме того, в шарнирно-сочлененном самосвале также имеется механизм стояночного тормоза, который обеспечивает удерживание грузовика на стоянке.
В одном из известных шарнирно-сочлененных самосвалов тормозная педаль обеспечивает не только управление колесными тормозами, но также и управление тормозом-замедлителем. Более конкретно, только функция тормоза-замедлителя включается тогда, когда тормозная педаль перемещается из нулевого положения или положения покоя в некоторое промежуточное положение, для определения того, что педаль находится в этом положении, используется электрический датчик, и тормоз-замедлитель задействуется на полную мощность.
Колесные тормоза активируются при дальнейшем нажатии на педаль, когда она проходит указанное промежуточное положение, и они действуют вместе с тормозом-замедлителем в верхнем диапазоне отклонения педали. Более конкретно, ножная педаль в верхнем диапазоне отклонения педали действует непосредственно на клапан в контуре гидравлической системы, который предназначен для управления колесными тормозами.
Первой целью изобретения является создание способа, создающего условия для гибкого и безопасного торможения, эффективного с экономической точки зрения.
Указанная цель достигается с помощью предлагаемого способа управления торможением транспортного средства, в котором используют один орган управления торможением оператором для управления тормозными устройствами, расположенными на взаимодействующих с поверхностью земли элементах транспортного средства, и по меньшей мере одним вспомогательным тормозом транспортного средства, и при выполнении которого посредством контура с тормозной текучей средой осуществляют передачу сигнала торможения от органа управления торможением оператором на тормозные устройства, расположенные на взаимодействующих с поверхностью земли элементах транспортного средства, измеряют давление текучей среды в контуре и используют измеренную величину давления в качестве входных данных для определения силы торможения для по меньшей мере одного вспомогательного тормоза транспортного средства и управления этим вспомогательным тормозом так, что обеспечивается пропорциональное распределение силы торможения между тормозными устройствами, расположенными на взаимодействующих с поверхностью земли элементах транспортного средства, и вспомогательным тормозом, в зависимости от измеренной величины давления в контуре тормозных устройств, причем дополнительно осуществляют измерение по меньшей мере одного рабочего параметра транспортного средства и используют сигнал, соответствующий величине этого рабочего параметра, в качестве дополнительной входной величины для определения силы торможения для по меньшей мере одного вспомогательного тормоза.
Таким образом, сила торможения создается непосредственно колесными тормозами при отклонении тормозной педали. При этом сила торможения может гибко распределяться между колесными тормозами и вспомогательными тормозами. Изобретение также создает условия для регулирования величины силы торможения для каждого из вспомогательных тормозов в зависимости от измеренной величины давления текучей среды.
Кроме того, измерение величины давления текучей среды в контуре колесных тормозов является экономичным способом получения надежного сигнала для определения силы торможения для вспомогательного тормоза.
В соответствии с предпочтительным вариантом осуществления изобретения способ включает определение соотношения между силой торможения тормозных устройств на элементах, взаимодействующих с поверхностью земли, и силой торможения вспомогательного тормоза. Иначе говоря, сила торможения распределяется определенным образом в зависимости от измеренного давления в контуре колесных тормозов. Более конкретно, сила торможения вспомогательного тормоза определяется в зависимости от измеренной величины давления в контуре колесных тормозов. В частности, способ включает увеличение части силы торможения, которая должна обеспечиваться вспомогательным тормозом, при более высоком давлении в контуре.
В соответствии с предпочтительным вариантом осуществления изобретения способ включает определение силы торможения вспомогательного тормоза в зависимости от возможностей охлаждения тормозных устройств. При этом создаются условия для создания сравнительно высокой силы торможения вспомогательным тормозом, в результате чего снижается износ колесных тормозов в некоторых рабочих режимах.
Как было отмечено выше, в предлагаемом в настоящем изобретении способе осуществляют измерение по меньшей мере одного рабочего параметра транспортного средства и используют сигнал, соответствующий величине этого рабочего параметра, в качестве дополнительной входной величины для определения силы торможения по меньшей мере для одного вспомогательного тормоза. Иначе говоря, соотношение между силами торможения, обеспечиваемыми колесными тормозами и вспомогательными тормозами, изменяют в зависимости от условий работы. Конечно, также в зависимости от условий работы могут изменяться соотношения между силами торможения, обеспечиваемыми каждым вспомогательным тормозом.
Рабочий параметр может быть, например, показателем скорости, включенной передачи или проскальзывания одного из элементов, взаимодействующих с поверхностью земли. Соответственно, часть силы торможения, которая должна создаваться вспомогательным тормозом, увеличивают для более высокой скорости и/или более высокой передачи, и часть силы торможения, которая должна создаваться вспомогательным тормозом, уменьшают при увеличении проскальзывания.
В соответствии с конкретным примером вспомогательным тормозом управляют для получения полной силы торможения уже при низких измеренных величинах давления в контуре колесных тормозов, если транспортное средство двигается с высокой скоростью. С другой стороны, при малых скоростях транспортного средства, величина давления в контуре колесных тормозов должна быть очень высокой, для того чтобы вспомогательный тормоз развивал полную силу торможения.
Второй целью изобретения является создание системы, создающей условия для гибкого и безопасного торможения, эффективного с экономической точки зрения.
Указанная цель достигается с помощью предлагаемой системы торможения транспортного средства, содержащей:
контур для передачи с помощью тормозной текучей среды сигналов торможения от одного органа управления торможением оператором на тормозные устройства, расположенные на взаимодействующих с поверхностью земли элементах транспортного средства, и на по меньшей мере один вспомогательный тормоз транспортного средства;
средство измерения давления текучей среды в контуре;
средство определения силы торможения для по меньшей мере одного вспомогательного тормоза транспортного средства в соответствии с измеренной величиной давления текучей среды и средство соответствующего управления вспомогательным тормозом так, что обеспечивается пропорциональное распределение силы торможения между тормозными устройствами, расположенными на взаимодействующих с поверхностью земли элементах транспортного средства, и вспомогательным тормозом, в зависимости от измеренной величины давления в контуре тормозных устройств; и средство определения по меньшей мере одного рабочего параметра транспортного средства и использование сигнала, соответствующего величине этого рабочего параметра, в качестве дополнительной входной величины для определения силы торможения по меньшей мере для одного вспомогательного тормоза.
В частных вариантах выполнения системы вспомогательный тормоз представляет собой тормоз-замедлитель двигателя или трансмиссионный тормоз-замедлитель.
Орган управления торможением оператором обеспечивает непосредственное воздействие на клапан, обеспечивающий управление потоком текучей среды к тормозным устройствам.
Тормозные устройства на каждом из элементов, взаимодействующих с поверхностью земли, могут представлять собой дисковые тормоза с жидкостным охлаждением.
Контур для торможения элементов транспортного средства, взаимодействующих с поверхностью земли, обеспечивает передачу сигнала торможения с помощью гидравлической жидкости.
Орган управления торможением оператором может представлять собой тормозную педаль.
В изобретении также предлагается транспортное средство, рабочая машина и шарнирно-сочлененный грузовой автомобиль, содержащие описанную систему, другие достоинства и преимущества, а также функции различных вариантов осуществления изобретения рассмотрены в нижеприведенном описании и в зависимых пунктах формулы изобретения.
Изобретение описывается на примере одного из вариантов его осуществления, представленного на прилагаемых чертежах, на которых показано:
на фиг. 1 - вид сбоку шарнирно-сочлененного самосвала; на фиг. 2 - схематический вид силовой передачи самосвала; на фиг. 3 - схема тормозной системы самосвала.
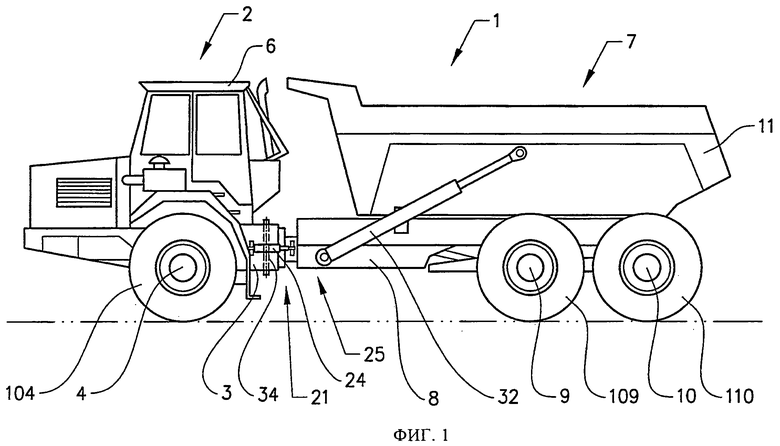
На фиг. 1 приведен вид сбоку шарнирно-сочлененного самосвала 1. Шарнирно-сочлененный самосвал 1 содержит переднюю часть 2, состоящую из передней рамы 3, передней оси 4 и кабины 6 водителя. Самосвал 1 также содержит заднюю часть 7, содержащую заднюю раму 8, переднюю ось 9, заднюю ось 10 и поворотный кузов или грузовую платформу 11.
Передняя 9 и задняя 10 оси задней части 7 самосвала входят в состав колесной тележки, присоединенной к задней раме, и указываются ниже как передняя ось 9 тележки и задняя ось 10 тележки, соответственно.
Передняя ось 4, передняя ось 9 тележки и задняя ось 10 тележки содержат левый элемент 104, 109, 110, соответственно, взаимодействующий с поверхностью земли, и правый элемент (не показан), взаимодействующий с поверхностью земли, в форме колес.
Передняя рама 3 соединяется с задней рамой 8 с помощью первого шарнира 21, который обеспечивает поворот передней оси 3 и задней оси 8 относительно друг друга вокруг вертикального шкворня 34 для обеспечения управления направлением движения самосвала. По сторонам шарнира 21 расположены два гидравлических цилиндра, обеспечивающие управление направлением движения самосвала. Управление работой гидравлических цилиндров осуществляет водитель самосвала с помощью рулевого колеса и/или ручки управления (не показаны).
Между передней 3 и задней 8 рамами имеется также второй шарнир 25, обеспечивающий возможность поворота рам относительно друг друга вокруг продольной оси самосвала 1.
Кузов 11 присоединяется к задней раме 8 с помощью шарнира 33 (см. фиг. 2) в задней части задней рамы 8, ля поворота кузова используются два поворотных цилиндра 32, присоединенных к первому концу задней рамы 8 и ко второму концу кузова 11. Поворотные цилиндры 32 установлены по обеим сторонам центральной продольной оси самосвала. При включении поворотных цилиндров 32 кузов 11 поворачивается относительно задней рамы 8.
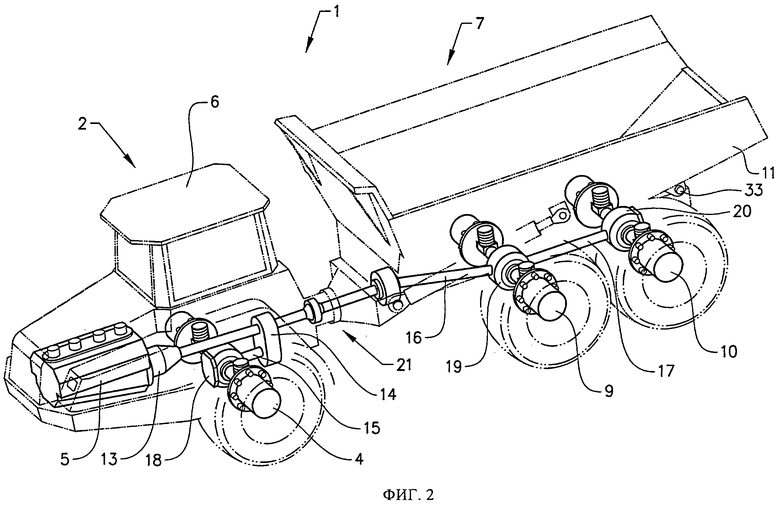
На фиг. 2 показана схематично силовая передача самосвала 1. Силовая передача содержит источник мощности (первичный привод) в форме двигателя внутреннего сгорания, в данном случае дизельного двигателя 5, обеспечивающего движение самосвала 1. Кроме того, силовая передача содержит главную коробку 13 передач в форме автоматической коробки передач, которая функционально соединяется с выходным валом двигателя 5. Главная коробка 13 передач может иметь, например, шесть передних передач и две задние передачи. Силовая передача также содержит раздаточную коробку 14 (коробку отбора мощности) для распределения движущей силы между передней осью 4 и двумя осями 9, 10 тележки.
Первый, второй и третий приводные валы 15, 16, 17 (карданные валы), соответственно, проходят в продольном направлении самосвала и соединяются функционально с раздаточной коробкой 14 и дифференциалами 18, 19, 20 осей 4, 9, 10, соответственно, два поперечных ведущих вала (разрезные оси) отходят в противоположных направлениях от соответствующего дифференциала. Каждый из этих поперечных валов вращает одно из колес самосвала.
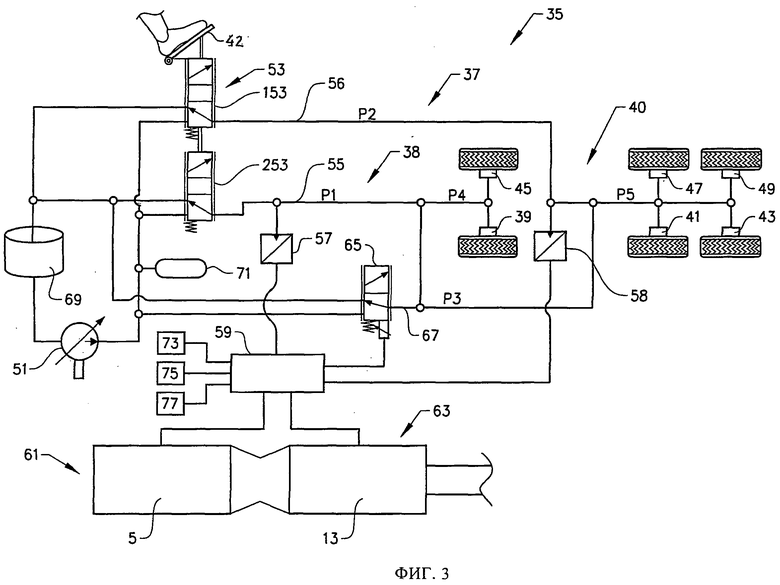
На фиг. 3 приведена схема тормозной системы 35 самосвала 1. Система 35 содержит контур 37, обеспечивающий передачу сигнала торможения с помощью гидравлической тормозной жидкости из органа 42 управления торможением оператором (тормозная педаль) на тормозные устройства 39, 41, 43, 45, 47, 49 колес, установленные на шести колесах самосвала. Контур 37 содержит первую часть 38 контура, обеспечивающую управление тормозными устройствами 39, 45 колес передней оси, и вторую часть 40, обеспечивающую управление тормозными устройствами 41, 43, 47, 49 колес осей тележки. Поскольку используются две части контура, торможение обеспечивается даже в случае отказа одной из частей контура тормозной системы. В качестве тормозных устройств используются гидравлические тормоза и, в частности, дисковые тормоза с жидкостным охлаждением.
Система 35 содержит также насос 51, обеспечивающий давление гидравлической жидкости в контуре 37. Тормозная педаль 42 обеспечивает непосредственное действие на клапанный узел 53, который установлен на гидравлической линии для управления сообщением по этой линии между насосом 51 и тормозными устройствами колес. Тормозная педаль 42 обеспечивает непосредственное действие на первую часть 253 клапанного узла, которая установлена на первой гидравлической линии 55 для управления сообщением по этой линии между насосом 51 и тормозными устройствами 39, 45 колес передней оси. Вторая часть 153 клапанного узла расположена на второй гидравлической линии 56 для управления сообщением по этой линии между насосом 51 и тормозными устройствами 41, 43, 47, 49 колес осей тележки. Первая и вторая части 253, 153 клапанного узла соединены механически между собой, так что они могут работать согласованно. Таким образом, клапан 53 обеспечивает регулируемое открытие и закрытие соединения по гидравлической линии между насосом и тормозными устройствами колес. Иными словами, орган управления торможением оператором обеспечивает по гидравлической линии прямое торможение колес.
По меньшей мере одно устройство 57, 58 обеспечивает измерение давления гидравлической жидкости в контуре 37. Первое измерительное устройство 57 находится в первой части контура, и второе измерительное устройство находится во второй части контура. Измерительные устройства 57, 58 содержат датчики давления, предназначенные для измерения давления в линиях 55, 56, соответственно, между клапаном 53 и тормозными устройствами колес. Датчик давления обеспечивает формирование электрического сигнала, соответствующего измеренному давлению гидравлической жидкости.
Система также содержит устройство 59 для определения силы торможения по меньшей мере одного вспомогательного тормоза самосвала на основе измеренного уровня давления гидравлической жидкости. Это устройство 59 определения силы торможения вспомогательного тормоза представляет собой контроллер 59 (или электронный блок управления), на вход которого поступает электрический сигнал, соответствующий измеренному давлению.
В предпочтительном варианте осуществления изобретения контроллер 59 реализуется в микропроцессоре. Контроллер содержит запоминающее устройство, которое, в свою очередь, содержит компьютерную программу, состоящую из программных сегментов, для осуществления способа управления при исполнении программы. Эта компьютерная программа может быть передана в контроллер различными способами, например, путем скачивания из другого компьютера, по проводной или беспроводной линии связи, или установкой платы памяти. В частности, может быть осуществлена передача программы по сети Интернет.
Контроллер 59 обеспечивает определение необходимой силы торможения вспомогательного тормоза в соответствии с измеренной величиной давления гидравлической жидкости. Контроллер 59 также обеспечивает формирование электрического сигнала, соответствующего необходимой силе торможения вспомогательного тормоза. Иначе говоря, сигнал давления вспомогательного тормоза формируется опосредованно в зависимости от уровня торможения, задаваемого водителем самосвала. Иначе говоря, одна тормозная педаль используется для контроля тормозных устройств колес и вспомогательных тормозов.
Система содержит несколько вспомогательных тормозов. К вспомогательным тормозам относится тормоз 61 двигателя и тормоз 63 трансмиссии (трансмиссионный тормоз-замедлитель). Тормоза-замедлители двигателя и трансмиссии являются известными устройствами и в данном варианте описываться не будут.
Соразмерное (пропорциональное) распределение силы торможения между тормозными устройствами колес и вспомогательными тормозами, а также определение моментов их включения и выключения осуществляются контроллером. В том случае, когда используется несколько вспомогательных тормозов, контроллер также определяет распределение между ними сил торможения и моменты включения и выключения, В любом случае управление вспомогательными тормозами осуществляется в зависимости от измеренного уровня давления гидравлической жидкости в контуре тормозных устройств колес.
В соответствии с одним из вариантов сила торможения вспомогательных тормозов определяется в зависимости от имеющихся возможностей охлаждения тормозных устройств колес. Сила торможения тормозом трансмиссии может регулироваться таким образом, чтобы колесные тормоза не использовались в большей степени, чем это может быть обеспечено при эффективном охлаждении.
Система содержит также устройства 73, 75, 77 измерения по меньшей мере одного рабочего параметра транспортного средства и использования сигнала, соответствующего величине этого рабочего параметра, в качестве дополнительной входной величины для определения силы торможения для указанного по меньшей мере одного вспомогательного тормоза. Такими рабочими параметрами транспортного средства может быть скорость, включенная передача, тяговое усилие и проскальзывание колес. Система 35 содержит также клапан 65, который расположен на дополнительной гидравлической линии 67 для управления сообщением по линии между насосом 51 и колесными тормозами. Гидравлическая линия 67 соединена с первой гидравлической линией 55 после первого датчика 57 давления. Иными словами, клапан 65 обеспечивает регулируемое открытие и закрытие дополнительного соединения по гидравлической линии между насосом и колесными тормозами. В этом случае, давление Р4 гидравлической жидкости, подаваемое на колесные тормоза передней оси, будет суммой давлений Р1 и Р3 в первой гидравлической линии 55 и в дополнительной гидравлической линии 67, соответственно.
Аналогичным образом, гидравлическая линия 67 соединена со второй гидравлической линией 56 после второго датчика 58 давления. В этом случае, давление Р5 гидравлической жидкости, подаваемое на колесные тормоза осей тележки, будет суммой давлений Р2 и Р3 во второй гидравлической линии 56 и в дополнительной гидравлической линии 67, соответственно. Контроллер 59 обеспечивает управление положением дополнительного клапана 65 с помощью электрического сигнала. Таким образом, в дополнение к управлению вспомогательными тормозами, контроллер может воздействовать на силу торможения колесных тормозов в соответствии с сигналом, поступающим на его вход.
В этом случае, управление колесными тормозами может осуществляться таким образом, чтобы они создавали большую силу торможения в тех ситуациях, когда сила торможения, создаваемая вспомогательными тормозами, меньше необходимой величины, так что сила торможения не достигает необходимого уровня (тормоз двигателя и/или тормоз трансмиссии могут иметь задержку в несколько секунд), а также при переключении передач, когда сила торможения, создаваемая тормозом трансмиссии, уменьшается для облегчения процесса переключения.
Система содержит также резервуар 69 для гидравлической жидкости и аккумулятор 71 для обеспечения выравнивания давления в гидравлическом контуре.
Термин “силовая передача”, используемый в настоящем описании, охватывает двигатель и всю систему передачи мощности от двигателя к элементам, взаимодействующим с поверхностью земли (с колесами). Таким образом, силовая передача включает сцепление, коробку передач (и любую раздаточную коробку), карданный вал (или карданные валы), поперечные ведущие оси и т.п. Понятие “силовая передача” также охватывает электрические и другие системы привода, далее, термин “элементы, взаимодействующие с поверхностью земли”, включает колеса, гусеницы и т.п.
Изобретение никоим образом не ограничивается рассмотренными выше вариантами его осуществления, и возможно использование других вариантов или модификаций без выхода за пределы объема, определяемого нижеприведенной формулой изобретения.
В качестве рабочей текучей среды в системе вместо гидравлической жидкости может использоваться воздух.
Изобретение не ограничивается использованием тормозов на каждом из элементов, взаимодействующих с поверхностью земли, транспортного средства. Может оказаться достаточным использовать колесные тормоза только на одной паре колес или на двух парах колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ПРОВЕРКИ ТОРМОЗНОЙ СПОСОБНОСТИ ОДНОГО ИЛИ НЕСКОЛЬКИХ ТОРМОЗНЫХ ЭЛЕМЕНТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2533772C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ СПОСОБНОСТИ ПРОГНОЗА ТОРМОЖЕНИЯ | 2009 |
|
RU2471241C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ РАБОЧЕЙ МАШИНЫ И ТОРМОЗНАЯ СИСТЕМА | 2008 |
|
RU2496667C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С САМОСВАЛЬНЫМ КУЗОВОМ | 2007 |
|
RU2467894C2 |
| САМОВЫРАВНИВАЮЩИЙСЯ ОДНООСНЫЙ САМОСВАЛ | 2020 |
|
RU2797318C1 |
| ТОРМОЗНАЯ СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2009 |
|
RU2471240C1 |
| КОНТУР УПРАВЛЕНИЯ РЕГУЛЯТОРА ТОРМОЗА ПРИЦЕПА И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2017 |
|
RU2731834C2 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2744653C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ФУНКЦИИ СВОБОДНОГО ХОДА АВТОМОБИЛЯ | 2006 |
|
RU2415039C2 |
Группа изобретений относится к способу и системе управления торможением транспортного средства, а также транспортному средству. Способ заключается в том, что обеспечивают пропорциональное распределение силы торможения между колесными тормозными устройствами и вспомогательным тормозом, осуществляют измерение рабочего параметра транспортного средства и используют его в качестве дополнительной входной величины для определения силы торможения вспомогательного тормоза. Система торможения транспортного средства содержит контур для передачи сигналов торможения от органа управления торможением оператором на тормозные устройства колес и на вспомогательный тормоз, средство измерения давления текучей среды в контуре, средство определения силы торможения для вспомогательного тормоза, средство управления вспомогательным тормозом, средство определения рабочего параметра транспортного средства и использование сигнала, соответствующего величине этого рабочего параметра. Транспортное средство содержит вышеуказанную систему. Транспортное средство может быть выполнено как рабочая машина или шарнирно-сочлененный грузовой автомобиль. Технический результат заключается в обеспечении безопасного и эффективного торможения. 5 н. и 21 з.п. ф-лы, 3 ил.
1. Способ управления торможением транспортного средства (1), в котором используют один орган (42) управления торможением оператором для управления тормозными устройствами (39, 41, 43, 45, 47, 49), расположенными на взаимодействующих с поверхностью земли элементах транспортного средства, и по меньшей мере одним вспомогательным тормозом (61, 63) транспортного средства, и при выполнении которого посредством контура (37) с тормозной текучей средой осуществляют передачу сигнала торможения от
органа (42) управления торможением оператором на тормозные устройства (39, 41, 43, 45, 47, 49), расположенные на взаимодействующих с поверхностью земли элементах транспортного средства, измеряют давление текучей среды в контуре (37) и используют измеренную величину давления в качестве входных данных для определения силы торможения для по меньшей мере одного
вспомогательного тормоза (61, 63) транспортного средства и управления этим вспомогательным тормозом так, что обеспечивается пропорциональное распределение силы торможения между тормозными устройствами, расположенными на взаимодействующих с поверхностью земли элементах транспортного средства, и вспомогательным тормозом, в зависимости от
измеренной величины давления в контуре (37) тормозных устройств, причем дополнительно осуществляют измерение по меньшей мере одного рабочего параметра транспортного средства и используют сигнал, соответствующий величине этого рабочего параметра, в качестве дополнительной входной величины для определения силы торможения для по меньшей мере одного
вспомогательного тормоза.
2. Способ по п. 1, включающий определение соотношения между силой торможения тормозных устройств на элементах, взаимодействующих с поверхностью земли, и силой торможения по меньшей мере одного
вспомогательного тормоза.
3. Способ по п. 1 или 2, включающий увеличение части силы торможения вспомогательного тормоза при более высоком давлении в контуре.
4. Способ по п. 1 или 2, включающий определение силы торможения вспомогательного тормоза в зависимости от возможностей охлаждения тормозных устройств.
5. Способ по п. 1, в котором измеряемым рабочим параметром является показатель скорости транспортного средства.
6. Способ по п. 5, включающий увеличение части силы торможения,
обеспечиваемой вспомогательным тормозом, при более высокой скорости.
7. Способ по п. 1, в котором измеряемым рабочим параметром является показатель включенной передачи.
8. Способ по п. 7, включающий увеличение части силы торможения, обеспечиваемой вспомогательным тормозом, при более высокой передаче.
9. Способ по п. 1, в котором измеряемым рабочим параметром является показатель проскальзывания одного из элементов, взаимодействующих с
поверхностью земли.
10. Способ по п. 9, включающий уменьшение части силы торможения, обеспечиваемой вспомогательным тормозом, при более высокой величине проскальзывания.
11. Способ по п. 1 или 2, в котором вспомогательный тормоз представляет собой тормоз-замедлитель (61) двигателя.
12. Способ по п. 1 или 2, в котором вспомогательный тормоз представляет
собой трансмиссионный тормоз-замедлитель (63).
13. Способ по п. 1 или 2, в котором орган (42) управления торможением оператором обеспечивает непосредственное воздействие на клапан (53), обеспечивающий управление потоком текучей среды к тормозным устройствам.
14. Способ по п. 1 или 2, в котором тормозные устройства на каждом из элементов, взаимодействующих с поверхностью земли, представляют собой дисковые тормоза с жидкостным охлаждением.
15. Способ по п. 1 или 2, в котором контур (37) для торможения элементов
транспортного средства, взаимодействующих с поверхностью земли, обеспечивает передачу сигнала торможения с помощью гидравлической жидкости.
16. Способ по п. 1 или 2, в котором орган (42) управления торможением
оператором представляет собой тормозную педаль.
17. Система (35) торможения транспортного средства, содержащая:
контур (37) для передачи с помощью тормозной текучей среды сигналов торможения от одного органа (42) управления торможением оператором на
тормозные устройства (39, 41, 43, 45, 47, 49), расположенные на взаимодействующих с поверхностью земли элементах транспортного средства, и на по меньшей мере один вспомогательный тормоз (61, 63) транспортного средства;
средство (57) измерения давления текучей среды в контуре;
средство (59) определения силы торможения для по меньшей мере одного вспомогательного тормоза (61, 63) транспортного средства в соответствии с измеренной величиной давления текучей среды и средство соответствующего управления вспомогательным тормозом так, что обеспечивается пропорциональное распределение силы торможения между тормозными
устройствами, расположенными на взаимодействующих с поверхностью земли элементах транспортного средства, и вспомогательным тормозом, в зависимости от измеренной величины давления в контуре (37) тормозных устройств; и
средство (73, 75, 77) определения по меньшей мере одного рабочего параметра транспортного средства и использование сигнала, соответствующего величине этого рабочего параметра, в качестве дополнительной входной величины для определения силы торможения по меньшей мере для одного
вспомогательного тормоза.
18. Система по п. 17, отличающаяся тем, что вспомогательный тормоз представляет собой тормоз-замедлитель (61) двигателя.
19. Система по п. 17, отличающаяся тем, что вспомогательный тормоз представляет собой трансмиссионный тормоз-замедлитель (63).
20. Система по п. 17, отличающаяся тем, что орган управления торможением оператором обеспечивает непосредственное воздействие на клапан
(53), обеспечивающий управление потоком текучей среды к тормозным устройствам.
21. Система по п. 17, отличающаяся тем, что тормозные устройства на каждом из элементов, взаимодействующих с поверхностью земли, представляют
собой дисковые тормоза с жидкостным охлаждением.
22. Система по п. 17, отличающаяся тем, что контур (37) для торможения элементов транспортного средства, взаимодействующих с поверхностью земли, обеспечивает передачу сигнала торможения с помощью гидравлической
жидкости.
23. Система по п. 17, отличающаяся тем, что орган (42) управления торможением оператором представляет собой тормозную педаль.
24. Транспортное средство (1), отличающееся тем, что оно содержит систему (35) по любому из пп. 17-23.
25. Рабочая машина (1), отличающаяся тем, что она содержит систему (35) по любому из пп. 17-23.
26. Шарнирно-сочлененный грузовой автомобиль (1), отличающийся тем,
что он содержит систему (35) по любому из п.п. 18-25.
| US 2001016795 A1, 23.08.2001 | |||
| KR 20020040340 A, 30.05.2002 | |||
| US 2003001426 A1, 02.01.2003 | |||
| Электронная система управления торможением оборудованного двигателем тягача | 1989 |
|
SU1809813A3 |
| . | |||

