Область техники, к которой относится изобретение
Изобретение относится к определению расположения материальных объектов в пространстве с помощью оптического измерительного оборудования и, более конкретно, к оптической системе для измерения геометрических параметров, характеризующих взаимное расположение элементов оборудования в пространстве, соответствующему способу определения взаимного расположения элементов в пространстве с помощью упомянутой системы и устройству регистрации оптического излучения для использования в упомянутой системе.
Уровень техники
Задача определения расположения в пространстве элементов оборудования и/или позиционирования таких элементов по отношению друг к другу актуальна в различных областях техники и промышленности. В частности, указанная задача высоко актуальна для настойки и корректировки работы промышленного оборудования больших размеров, включающего в себя вращающиеся валы, маховики и т.п., где погрешности в позиционировании или стыковке вращающихся элементов могут приводить к неправильной работе оборудования и быстрому износу его составных частей.
Перечислим несколько наиболее распространенных прикладных задач, в которых требуется определение взаимного расположения элементов в пространстве. Во-первых, часто требуется высокоточное соединение друг с другом двух вращающихся валов, являющихся составными частями разных машин, или разных блоков одной многоэлементной машины. Например, такое соединение подразумевает стыковку валов в турбинах, генераторах, двигателях и т.д., или их соединение с оборудованием, которое приводится в действие такими турбинами, генераторами, двигателями и т.д. Проблема точного соединения валов или других элементов оборудования часто встречается при первом запуске многоэлементных промышленных систем, однако не ограничивается такими случаями. В частности, рассогласования элементов оборудования промышленного оборудования могут возникать в условиях длительной (возможно, непрерывной) работы оборудования, когда такие рассогласования необходимо контролировать, или устранять, например, при превышении некоторого порогового уровня рассогласования. Также в данной области техники выделяют задачи по определению рассогласований элементов промышленного оборудования, вызванных изменениями температуры элементов или оборудования, в состав которого они входят (в частности, температурными расширениями элементов).
В общем случае, актуальны задачи определения расположения элемента в пространстве по отношению к некоторой опорной точке (возможно - другому элементу), возможно, не относящиеся к соединению этого элемента с каким-либо другим объектом. Более того, если элемент имеет большие геометрические размеры и сложную форму, например содержит поверхности разных уровней, может потребоваться измерение геометрических параметров самого элемента, например, в контексте поверхностей разного уровня, нахождение различий расположения этих поверхностей в пространстве.
Отметим, что задачи, в которых требуется определение взаимного расположения элементов в пространстве, не ограничиваются перечисленными выше примерами. Все представленные выше прикладные задачи приведены только в качестве пояснения.
Относительно используемого в данной заявке термина «рассогласование», необходимо отметить следующее. На практике могут встречаться, и соответственно, подлежать измерению, разные типы рассогласования элементов в пространстве. Например, угловые рассогласования, которые подразумевают угловое смещение (наклон) элемента, и любые продольные рассогласования (например, смещение вала вдоль его оси вращения) одного элемента по отношению к другому. Для специалистов в данной области техники будет понятно, что любые такие рассогласования могут характеризоваться набором геометрических величин (в частном случае, одной геометрической величиной). Например, угловое смещение вала по отношению к другому валу можно описать значением угла наклона плоскости поперечного сечения вала, в сочетании с координатами, задающими расположение в пространстве оси вращения вала, по отношению к другому валу. Поэтому в целях упрощения описания, далее в рамках настоящей заявки рассогласование любого типа (в том числе комбинированное, т.е. содержащее разнотипные рассогласования) называется просто «рассогласованием», при этом учитывается, что любое такое рассогласование может быть исчерпывающим образом описано с помощью определенного набора геометрических параметров.
Также необходимо подчеркнуть, что корректировка взаимного расположения элементов промышленного оборудования относительно друг друга часто имеет существенную техническую сложность. Например, в случаях, когда необходимо состыковать элементы, имеющие большие размеры и/или закрепленные в машинах, которые в свою очередь зафиксированы в пространстве (например, жестко зафиксированы на полу цеха производства, или имеют настолько большую массу, что их перемещение трудноосуществимо). В описанных условиях невозможно свободно перемещать элементы относительно друг друга, чтобы добиться их стыковки, поэтому возникает необходимость в проведении измерений для точного определения расположения элементов по отношению друг к другу. Требуется также, чтобы результаты упомянутого определения позволяли выполнить минимальную корректировку расположения упомянутых машин в пространстве (предпочтительно, только одной из машин) для соединения элементов с допустимой степенью точности.
Изобретение, представленное в настоящей заявке, направлено на решение задачи определения расположения элементов в пространстве по отношению друг к другу.
В уровне техники известно несколько подходов к решению упомянутой задачи (например, согласно публикациям US 5715609, дата публикации 10.02.1998, и US 6404903, дата публикации 21.03.2000). В частности, известны измерительные устройства и системы, основанные на применении оптических средств, которые позволяют оператору определять набор геометрических параметров, описывающих рассогласование и/или взаимное расположение элементов в пространстве. Преимуществом таких оптических систем для измерения геометрических параметров рассогласования является возможность проведения измерений для элементов, находящихся на сравнительно большом расстоянии друг от друга (и/или имеющих значительные геометрические размеры), посредством передачи и приема оптического излучения, способного распространяться на большие расстояния с малыми потерями мощности излучения. Еще одним преимуществом оптических измерительных систем является отсутствие электромагнитного воздействия оптического излучения на оборудование и высокий уровень безопасности для персонала (обеспечиваемый за счет соблюдения норм безопасности по уровню мощности оптического излучения). Наконец, преимуществом оптических измерительных систем можно считать высокий уровень развития современной оптической техники, обуславливающий разнообразие, высокие характеристики и сравнительно низкую стоимость оптических элементов, в частности источников и приемников оптического излучения.
Известные в данной области техники оптические системы для определения взаимного расположения элементов промышленного оборудования включают в себя два измерительных блока: блок источника оптического излучения и блок приемника оптического излучения. Причем блок приемника содержит (или представляет собой) позиционно-чувствительный детектор оптического излучения, т.е. средство регистрации оптического излучения, которое позволяет определить координаты места падения луча в плоскости регистрации оптического излучения. Например, в зависимости от типа позиционно-чувствительного детектора, могут определяться координаты пятна падения луча на фоточувствительную площадку приемника, или координаты элемента ПЗС устройства, на который падает луч, и т.д. Кроме перечисленного, известные системы содержат вычислительный блок для обработки показаний позиционно-чувствительного детектора и определения взаимного расположения элементов. Принцип работы известной в уровне техники системы заключается в следующем: упомянутые измерительные блоки закрепляются на подлежащих измерению элементах, так чтобы луч оптического излучения из блока источника попадал в позиционно-чувствительный детектор блока приемника. Таким образом, регистрируя место падения луча оптического излучения в позиционно-чувствительном детекторе, можно оценить ошибку центровки и продольное рассогласование между источником и приемником, на основании чего может быть вычислено пространственное рассогласование элементов, на которых они закреплены.
Более подробно, процесс определения пространственного рассогласования элементов относительно друг друга на основании показаний позиционно-чувствительного детектора оптического излучения содержит серию последовательных измерений, выполняемых при согласованном повороте измерительных блоков вокруг оси вращения (симметрии) элементов, на которых они закреплены. Или, что аналогично, при закреплении измерительных блоков на элементах в разных угловых положениях в плоскости поперечного сечения элементов. Такие измерения выполняются до тех пор, пока накопленные показания позиционно-чувствительного детектора не позволят составить систему уравнений, которая с заданной точностью описывает взаимное расположение элементов в пространстве. Подробности осуществления такой серии измерений и последующей обработки соответствующих показаний позиционно-чувствительного детектора известны специалистам в данной области техники (например, согласно публикациям US 5715609, US 6404903), поэтому такие подробности будут опущены в последующем описании с целью упрощения настоящей заявки.
Однако необходимо уточнить, что повторные измерения в нескольких положениях элементов/измерительных блоков (при их повороте), известные в уровне техники, позволяют упростить расчет рассогласования двух элементов в пространстве. А именно, вычисление набора геометрических параметров, характеризующих рассогласование элементов (т.е. построение системы уравнений), можно осуществить на основании набора координат луча (точки падения луча в разных положениях измерительных модулей) только по одной из координатных осей (по оси абсцисс или ординат) в плоскости регистрации оптического излучения детектора. Благодаря отмеченному свойству, в оптических системах для определения взаимного расположения элементов в пространстве можно использовать более простые и дешевые однокоординатные позиционно-чувствительные детекторы (т.е. позволяющие определять только одну координату точки падения луча в плоскости регистрации оптического излучения).
Также отметим, что в современных оптических системах для определения расположения элементов в пространстве относительно друг друга каждый из упомянутых измерительных блоков содержит как источник, так и приемник излучения. Соответственно, измерения проходят одновременно в двух направлениях, а измерительные блоки являются взаимозаменяемыми.
Однако известные в уровне техники оптические системы для определения взаимного расположения элементов в пространстве имеют ряд недостатков. Прежде всего, всегда актуальным является снижение стоимости и упрощение таких измерительных систем. В этом отношении необходимо отметить, что наиболее дорогостоящим компонентом известных систем является позиционно-чувствительный детектор оптического излучения, причем его стоимость возрастает пропорционально увеличению площади области детектирования в плоскости регистрации излучения детектора. Поэтому недостатком существующих систем являются сравнительно малые, ограниченные по экономическим причинам, геометрические размеры области детектирования позиционно-чувствительного детектора, что усложняет попадание в ее пределы луча оптического излучения из источника.
Малые геометрические размеры области детектирования позиционно-чувствительных детекторов частично обуславливают следующий недостаток известных в данной области техники измерительных систем. А именно, известные системы имеют высокую сложность процесса настройки для начала измерений. Из-за малых (можно даже сказать сверхмалых) геометрических размеров пятна падения луча и области детектирования оптического излучения в приемнике, технически сложной является задача размещения измерительных блоков на элементах оборудования таким образом, чтобы луч оптического излучения, генерируемый блоком источника, попадал в пределы области детектирования блока приемника. Отметим также, что настройка (или, другими словами, поиск рабочей точки системы) не может быть осуществлена в автоматическом режиме, следовательно, требует участия оператора, что вносит в процесс настройки высокую вероятность ошибок «человеческого фактора».
Также недостатком известных в данной области техники систем является сравнительно малый и ограниченный диапазон измерений, который напрямую связан с геометрическими размерами области детектирования оптического излучения в позиционно-чувствительном детекторе.
Из уровня техники известно техническое решение, описывающее способ и устройство для статического выравнивая валов и контроля над выравниванием валов [патент США US 4518855, дата публикации 21.05.1985], которое было принято за прототип при создании настоящего изобретения. Упомянутое устройство выравнивания валов содержит два измерительных блока, каждый из которых содержит средство генерации направленного луча оптического излучения и двухкоординатное средство регистрации луча оптического излучения (т.е. двухкоординатный позиционно-чувствительных детектор). Согласно решению-прототипу, измерительные блоки закрепляются, с помощью специальных держателей, на подлежащих выравниванию валах. При этом обеспечивается попадание луча, генерируемого каждым из блоков, в позиционно-чувствительный детектор противоположного блока, которые выдают два соответствующих сигнала (координаты точки падения луча). И далее, на основании упомянутых сигналов из позиционно-чувствительных детекторов измерительных блоков, определяется рассогласование валов.
Описанное техническое решение также предусматривает вариант реализации, в котором источники излучения в упомянутых измерительных блоках оснащаются выходными цилиндрическими линзами, которые преобразуют проходящий через них луч от источника (лазера) в «полосу» лазерного излучения. Более того, упомянутые измерительные блоки дополнительно содержат кубический делитель, который делит указанную полосу лазерного излучения на две полосы лазерного излучения, с вертикальной и горизонтальной ориентацией, соответственно, которые и направляются в сторону детектора противоположного измерительного блока. Таким образом, в данном варианте решения-прототипа обеспечивается возможность детектирования не точки падения луча (геометрически малого объекта), а световой полосы (или пересечения световых полос), которая представляет собой пятно падения полосы лазерного света от источника (с цилиндрической линзой на выходе) в плоскости регистрации позиционно-чувствительного детектора. Согласно описанному варианту технического решения-прототипа, достигается некоторое упрощение детектирования луча оптического излучения и увеличение диапазона измерений в такой системе.
Однако в описанном прототипе можно отметить следующие недостатки. Во-первых, преимущества описанного решения достигаются за счет существенного усложнения конструкции измерительных блоков, т.е. увеличения стоимости рассматриваемого устройства. Например, использование двухкоординатного позиционно-чувствительного детектора в измерительных блоках согласно упомянутому решению представляется нерациональным и приводит к увеличению стоимости устройства, поскольку, как было указано выше, для определения взаимного расположения элементов в пространстве в подобной системе достаточно однокоординатного позиционно-чувствительного детектора (при условии повторения измерений в различных положениях измерительных элементов).
Далее, применение любого оптического средства преобразования излучения на выходе источника (в данном случае, цилиндрической линзы) снижает выходную мощность излучения, которая далее снижается при распространении излучения от источника к приемнику пропорционально расстоянию между ними. Более того, при больших расстояниях между измерительными блоками, и из-за расходимости оптического пучка (луча) при его распространении, в область детектирования позиционно-чувствительного детектора в каждом из блоков может попадать только часть световой полосы, являющейся изображением, в плоскости регистрации приемника, световой полосы на выходе источника. Таким образом, фактически принимаемая мощность оптического излучения от источника в техническом решении-прототипе снижена, по сравнению с измерительными системами без дополнительного преобразования излучения источника, что ухудшает рабочие характеристики системы, в частности точность и диапазон измерений.
В этом отношении необходимо отметить, что поскольку измерения в рассматриваемых системах проводятся в условиях производства, допустимая мощность применяемых в них источников излучения строго ограничена сверху нормами по лазерной безопасности для персонала производства и на практике не превышает 1 мВт (единиц мВт).
Таким образом, в уровне техники есть необходимость в увеличении точности измерений, упрощении процесса настройки, увеличении диапазона измерений и уменьшении стоимости оптических систем для определения взаимного расположения элементов в пространстве.
Раскрытие изобретения
Задачей настоящего изобретения является преодоление недостатков, имеющихся в уровне техники. Поставленная задача решается за счет создания оптической измерительной системы для определения взаимного расположения, по меньшей мере, двух элементов в пространстве, соответствующего способа и устройства регистрации оптического излучения для использования в упомянутой оптической измерительной системе.
Техническим результатом изобретения является упрощение процесса настройки, увеличение диапазона измерений в упомянутой оптической измерительной системе и уменьшение ее стоимости.
Для решения поставленной задачи и достижения связанного с ней результата, в настоящем изобретении заявляется способ определения взаимного расположения, по меньшей мере, двух элементов в пространстве, с помощью оптической измерительной системы, содержащей, по меньшей мере, два измерительных модуля, выполненных с возможностью закрепления на упомянутых элементах, содержащий этапы, на которых:
формируют, с помощью первого измерительного модуля, луч оптического излучения, направленный в сторону второго измерительного модуля;
обеспечивают попадание луча оптического излучения в область детектирования на плоскости регистрации оптического излучения позиционно-чувствительного детектора оптического излучения во втором измерительном модуле;
определяют, с помощью упомянутого позиционно-чувствительного детектора, по меньшей мере, одну координату изображения луча оптического излучения в пределах области детектирования на плоскости регистрации оптического излучения детектора; и
вычисляют, по меньшей мере, один геометрический параметр, характеризующий взаимное расположение упомянутых, по меньшей мере, двух элементов в пространстве на основании упомянутой, по меньшей мере, одной координаты.
Заявленный способ отличается от прототипа наличием следующих особенностей. Способ содержит этап, на котором: осуществляют преобразование луча оптического излучения с помощью оптического элемента во втором измерительном модуле, до его попадания в упомянутую область детектирования на плоскости регистрации,
причем в результате преобразования изображение луча оптического излучения на плоскости регистрации масштабно преобразуется по двум взаимно перпендикулярным осям, лежащим в этой плоскости и имеющим отличающиеся друг от друга коэффициенты масштабирования,
причем упомянутая, по меньшей мере, одна координата изображения преобразованного луча оптического излучения представляет собой координату, по меньшей мере, одной из упомянутых осей масштабирования в упомянутой плоскости регистрации.
Согласно изобретению, упомянутое преобразование луча оптического излучения, с помощью оптического элемента, может представлять собой дифракционное разложение, осуществляемое с помощью дифракционной решетки, или анаморфирование, осуществляемое с помощью анаморфота.
Заявленный способ также предусматривает, что этап определения координат изображения луча в плоскости регистрации позиционно-чувствительного детектора может повторяться два или более раз, при этом этап вычисления, по меньшей мере, одного геометрического параметра может выполняться на основании соответствующих двух или более координат, полученных в результате упомянутого повторения. При этом, упомянутое повторение может выполняться после изменения положения в пространстве упомянутых элементов и/или измерительных модулей, например после их поворота вокруг соответствующих осей вращения.
Способ согласно настоящему изобретению может дополнительно содержать этап дополнительного преобразования луча оптического излучения с помощью одного или более вспомогательных оптических средств, который может осуществляться как до, так и после этапа преобразования луча с помощью упомянутого оптического средства.
Дополнительно, изобретение предусматривает возможность сохранения данных, полученных в результате упомянутого определения и/или упомянутого вычисления, представления таких данных пользователю в графической и/или другой доступной для восприятия форме и передачи стороннему устройству, с помощью проводного и/или беспроводного соединения.
Согласно настоящему изобретению также заявляется оптическая измерительная система для определения взаимного расположения, по меньшей мере, двух элементов в пространстве, выполненная с возможностью осуществления способа согласно настоящему изобретению. И более конкретно, заявленная система содержит:
первый измерительный модуль, выполненный с возможностью закрепления на первом из упомянутых элементов и содержащий блок излучения, выполненный с возможностью формирования направленного луча оптического излучения;
второй измерительный модуль, выполненный с возможностью закрепления на втором из упомянутых элементов и содержащий позиционно-чувствительный детектор, выполненный с возможностью определения, по меньшей мере, одной координаты изображения луча оптического излучения в пределах области детектирования на плоскости регистрации оптического излучения детектора; и
модуль обработки, выполненный с возможностью получения данных от первого и второго измерительных модулей, включающих в себя упомянутую, по меньшей мере, одну координату, и возможностью вычисления, по меньшей мере, одного геометрического параметра, характеризующего взаимное расположение упомянутых, по меньшей мере, двух элементов в пространстве, на основании упомянутых данных.
При этом заявленная система отличается от прототипа тем, что второй измерительный модуль содержит оптический элемент, обеспечивающий преобразование луча оптического излучения до его попадания в упомянутую область детектирования на плоскости регистрации,
причем в результате преобразования изображение луча оптического излучения на плоскости регистрации масштабно преобразуется по двум взаимно перпендикулярным осям, лежащим в этой плоскости и имеющим отличающиеся друг от друга коэффициенты масштабирования,
причем упомянутая, по меньшей мере, одна координата изображения преобразованного луча оптического излучения представляет собой координату, по меньшей мере, одной из упомянутых осей масштабирования в упомянутой плоскости регистрации.
Согласно настоящему изобретению, упомянутый оптический элемент может представлять собой дифракционную решетку, осуществляющую дифракционное разложение луча оптического излучения, или анаморфот, осуществляющий анаморфирование изображения луча оптического излучения на упомянутой плоскости регистрации.
В заявленной системе, определение, по меньшей мере, одной координаты изображения луча оптического излучения может повторяться два или более раз, с получением соответствующих двух или более координат. В этом случае вычисление упомянутого геометрического параметра может выполняться на основании соответствующих двух или более координат. Причем упомянутое повторение может выполняться после изменения положения в пространстве упомянутых элементов и/или измерительных модулей, например после их поворота вокруг соответствующих осей вращения.
Далее, изобретение предусматривает возможность наличия во втором измерительном модуле одного или более вспомогательных оптических средств, выполненных с возможностью дополнительного преобразования луча оптического излучения, которые могут располагаться перед и/или после упомянутого оптического элемента по направлению распространения луча оптического излучения.
Настоящее изобретение также предусматривает возможность наличия в заявленной системе интерфейса для обмена данными между компонентами системы с помощью проводного и/или беспроводного соединения и запоминающего устройства для сохранения данных. Также заявленная система может содержать средство передачи данных, полученных в системе, стороннему устройству с помощью проводного и/или беспроводного соединения и модуль отображения для представления данных пользователю в графической и/или другой доступной для восприятия форме. Причем упомянутые запоминающее устройство, средство передачи данных и модуль отображения могут быть выполнены как составная часть модуля обработки.
Дополнительно, первый измерительный модуль заявленной системы может содержать элементы, аналогичные элементам второго измерительного модуля, а второй измерительный модуль может содержать элементы, аналогичные элементам первого измерительного модуля. В таком случае измерительные модули могут одновременно проводить двусторонние измерения и являются взаимозаменяемыми.;
Также, согласно настоящему изобретению, первый и/или второй измерительный модули могут содержать процессор и запоминающее устройство. При выполнении этого условия модуль обработки в заявленной системе может быть реализован с помощью программных средств, сохраненных в запоминающем устройстве первого и/или второго измерительного модуля и исполняемых процессором первого и/или второго измерительного модуля.
Кроме того, согласно настоящему изобретению, заявляется устройство регистрации оптического излучения, используемое в оптической измерительной системе для определения взаимного расположения, по меньшей мере, двух элементов в пространстве, согласно настоящему изобретению. Более конкретно, заявленное устройство регистрации оптического излучения выполнено с возможностью закрепления на втором элементе из упомянутых элементов, а упомянутая система содержит источник оптического излучения, выполненный с возможностью закрепления на первом элементе из упомянутых элементов и формирования направленного луча оптического излучения.
Заявленное устройство регистрации оптического излучения содержит позиционно-чувствительный детектор, выполненный с возможностью определения, по меньшей мере, одной координаты изображения луча оптического излучения от источника оптического излучения в пределах области детектирования на плоскости регистрации оптического излучения детектора,
при этом упомянутая, по меньшей мере, одна координата характеризует расположение в пространстве данного устройства регистрации по отношению к упомянутому источнику оптического излучения.
Устройство регистрации оптического излучения согласно настоящему изобретению отличается от прототипа тем, что содержит оптический элемент, обеспечивающий преобразование луча оптического излучения до его попадания в упомянутую область детектирования на плоскости регистрации,
причем в результате преобразования изображение луча оптического излучения на плоскости регистрации масштабно преобразуется по двум взаимно перпендикулярным осям, лежащим в этой плоскости и имеющим отличающиеся друг от друга коэффициенты масштабирования,
причем упомянутая, по меньшей мере, одна координата изображения преобразованного луча оптического излучения представляет собой координату, по меньшей мере, одной из упомянутых осей масштабирования в упомянутой плоскости регистрации.
При этом, заявленное устройство регистрации оптического излучения может дополнительно содержать источник оптического излучения, выполненный с возможностью формирования направленного луча оптического излучения.
Кроме того, согласно изобретению, упомянутый оптический элемент может представлять собой дифракционную решетку, осуществляющую дифракционное разложение луча оптического излучения, или анаморфот, выполняющий анаморфирование изображения луча оптического излучения на упомянутой плоскости регистрации.
Также, заявленное устройство обеспечивает возможность повторения упомянутого определения координат изображения луча оптического излучения позиционно-чувствительным детектором, два или более раз. Причем указанное повторение может выполняться после изменения положения в пространстве упомянутых элементов, например после их поворота вокруг соответствующих осей вращения.
Кроме того, согласно настоящему изобретению, заявленное устройство может содержать один или более вспомогательных оптических средств, выполненных с возможностью дополнительного преобразования луча оптического излучения, которые могут располагаться перед и/или после упомянутого оптического элемента по направлению распространения луча оптического излучения.
Настоящее изобретение также предусматривает возможность наличия в устройстве регистрации оптического излучения запоминающего устройства для сохранения данных, средства передачи данных, получаемых в устройстве, стороннему устройству с помощью проводного и/или беспроводного соединения, и модуля отображения для представления упомянутых данных пользователю в графической и/или другой доступной для восприятия форме.
Кроме того, заявленное устройство может содержать вычислительный модуль, выполненный с возможностью обработки данных, полученных позиционно-чувствительным детектором для вычисления, по меньшей мере, одного геометрического параметра, характеризующего расположение в пространстве упомянутого первого элемента по отношению к упомянутому второму элементу.
Краткое описание чертежей
Настоящее изобретение подробно раскрывается ниже в описании предпочтительных вариантов осуществления изобретения и иллюстрируется следующими чертежами:
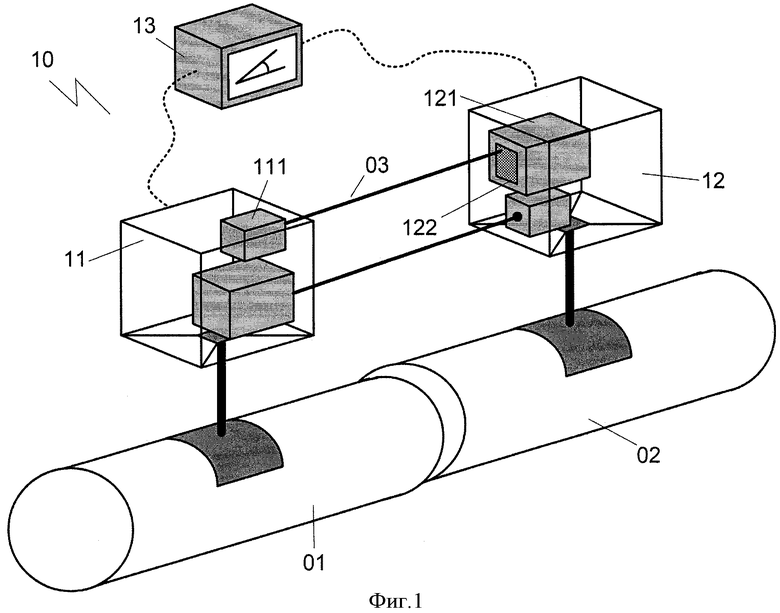
Фиг.1 иллюстрирует оптическую измерительную систему для определения взаимного расположения, по меньшей мере, двух элементов в пространстве согласно настоящему изобретению.
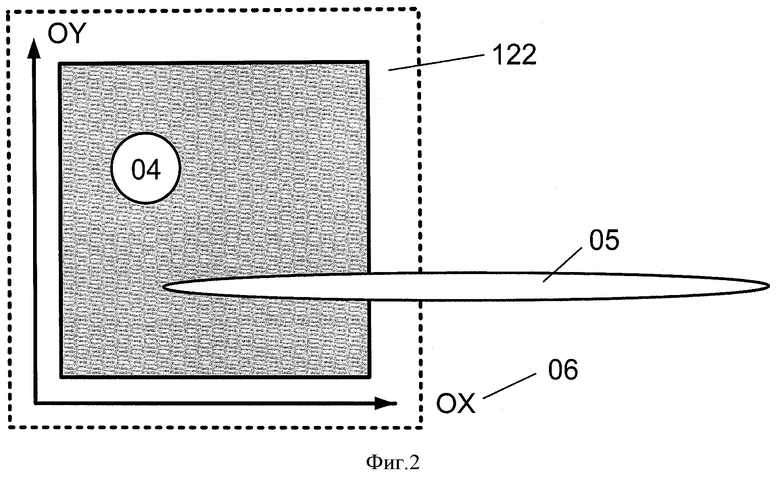
Фиг.2 иллюстрирует примеры изображения луча оптического излучения в области детектирования на плоскости регистрации оптического излучения в позиционно-чувствительном детекторе.
Фиг.3 детально иллюстрирует устройство регистрации оптического излучения в составе оптической измерительной системы для определения взаимного расположения, по меньшей мере, двух элементов в пространстве согласно настоящему изобретению.
Осуществление изобретения
Настоящее изобретение далее поясняется на основании примеров осуществления со ссылками на прилагаемые чертежи.
На фиг.1 представлено схематическое изображение оптической измерительной системы (10) для определения взаимного расположения, по меньшей мере, двух элементов (01, 02) в пространстве согласно настоящему изобретению.
В предпочтительном варианте осуществления изобретения элементы (01, 02) представляют собой валы, закрепленные в блоках промышленного оборудования, с возможностью вращения вокруг соответствующих осей вращения.
Однако элементы (01, 02) не ограничиваются приведенным выше конкретным вариантом осуществления, они могут быть любыми материальными объектами, которые могут размещаться в пространстве произвольным образом. Соответственно, в настоящей заявке термин «элемент» должен пониматься в самом общем смысле.
Упомянутые оси вращения элементов (01, 02) предпочтительно являются также их осями симметрии, однако могут быть любыми осями, вокруг которых осуществляется поворот соответствующих элементов.
Система (10) включает в себя первый измерительный модуль (11), выполненный с возможностью закрепления на первом (01) из упомянутых элементов; второй измерительный модуль (12), выполненный с возможностью закрепления на втором (02) элементе; и модуль (13) обработки, выполненный с возможностью получения и обработки данных от первого и второго измерительных модулей.
Система (10) выполнена с возможностью проведения измерений и вычисления на их основе набора геометрических параметров (в простейшем случае, одного геометрического параметра), характеризующего рассогласование элементов (01, 02) в пространстве, т.е. характеризующего расположение элемента (01) в пространстве по отношению к элементу (02). Отметим, что один и тот же набор геометрических параметров характеризует также расположение элемента (02) в пространстве по отношению к элементу (01). Учитывая вышесказанное, термины «расположение одного элемента по отношению к другому» и «взаимное расположение элементов» являются синонимами и используются далее взаимозаменяемо. Также специалистам в данной области должно быть понятно, что определение рассогласования элементов в пространстве подразумевает определение взаимного расположения этих элементов, и наоборот.
Отметим также, что взаимное расположение в пространстве рассматриваемых элементов (01, 02) может характеризоваться любым рассогласованием, как по величине, так и по типу, включая комбинированное рассогласование (например, продольное и угловое), однако понятно, что любое рассогласование можно описать некоторым набором геометрических параметров с заданной точностью. Необходимая точность измерений в системе (10) зависит от особенностей конкретной решаемой задачи и условий, в которых она используется. Например, для современных измерительных систем определения рассогласования между элементами промышленного оборудования задается требование по разрешающей способности в 0,01 мм или менее.
Согласно фиг.1, первый измерительный модуль (11) содержит блок (111) излучения, выполненный с возможностью генерации луча (03) оптического излучения в направлении второго измерительного модуля (12). Второй измерительный модуль (12) содержит позиционно-чувствительный детектор (121), выполненный с возможностью определения координат изображения (пятна падения) луча (03) оптического излучения в переделах области детектирования на плоскости (122) регистрации оптического излучения позиционно-чувствительного детектора. Областью детектирования называется координатная область, в пределах которой детектор может определять координаты изображения (пятна падения) луча оптического излучения. Геометрические размеры упомянутой области детектирования являются одним из важнейших параметров, определяющих возможности системы (10). В частности, от размеров области детектирования зависит сложность настройки системы для начала измерений (сложность попадания точки падения луча (03) в пределы упомянутой области), а также диапазон измерений. Под диапазоном измерений в данном случае понимается диапазон по величине рассогласования элементов (01, 02) в пространстве, в пределах которого технически возможно осуществить измерения с помощью системы (10), т.е. технически возможно обеспечить попадание луча (03) в область детектирования.
Для специалистов в данной области техники также должно быть понятно, что функциональные возможности позиционно-чувствительного детектора (121) в системе (10) могут выполнять разные устройства. Например, позиционно-чувствительный детектор (также распространенным является название «координатный детектор») может быть PIN фотодиодом с одинаковым значением сопротивления в одном или двух направлениях, обеспечивающий возможность определения координат точки (пятна) падения луча оптического излучения в его фоточувствительной области. В качестве альтернативы, позиционно-чувствительным детектором может быть ПЗС-матрица любого типа, и т.д. Соответственно, под термином «позиционно-чувствительный детектор» в настоящем изобретении понимается любое техническое средство регистрации оптического излучения, которое обеспечивает возможность определения точки падения луча от источника на своей плоскости регистрации оптического излучения. Любые средства соответствующего назначения, которые будут разработаны в будущем, также должны попадать в рамки определения позиционно-чувствительного детектора согласно настоящему изобретению.
В соответствии с описанным выше назначением, далее для краткости, первый измерительный модуль (11) также может называться модулем (11) источника, а второй измерительный модуль (12) - модулем (12) детектора.
После закрепления измерительных модулей (11, 12) системы (10) на соответствующих элементах (01, 02), взаимное расположение которых необходимо определить, оператор осуществляет процесс настройки системы (10). В результате настройки, обеспечивается такая траектория распространения луча (03) оптического излучения, формируемого блоком (111) излучения первого модуля (11), что его изображение располагается в области детектирования на плоскости (122) регистрации оптического излучения позиционно-чувствительного детектора (121) второго модуля (12). Упомянутый процесс настройки может аналогичным образом называться поиском рабочей точки системы (10).
После успешного завершения настройки, измерение с помощью системы (10) осуществляется следующим образом. Определяются показания (т.е. координата(ы) изображения луча (03)) позиционно-чувствительного детектора (121) в положении А измерительных модулей. По умолчанию, под положением А подразумевается положение элементов (01, 02) и измерительных модулей (11, 12) по окончанию настройки. Однако положение А может быть любым положением элементов (01, 02) и/или измерительных модулей (11, 12) в пространстве, при котором возможно осуществить измерение в системе (10).
После этого, элементы (01, 02) вместе с закрепленными на них измерительными модулями (11, 12) поворачиваются вокруг соответствующих осей вращения, по возможности согласованным образом, в положение В. Под согласованным поворотом в данном случае подразумевается такой поворот элементов (01, 02) и/или измерительных модулей (11, 12), при котором сдвиг изображения луча (03) в области детектирования позиционно-чувствительного детектора (121) обусловлен только рассогласованием элементов (01, 02), а не смещением модуля (12) приемника относительно модуля (11) источника. Другими словами, согласованный поворот подразумевает поворот на один и тот же угол в плоскости поперечного сечения элементов (или одного из элементов). Предпочтительно, осуществляется согласованный поворот элементов (01, 02) на угол в 30 градусов, по отношению к положению А. Однако необходимо понимать, что установка элементов (01, 02) и/или измерительных модулей (11, 12) в положение В может быть проведена и любым подходящим способом, например повторным закреплением их на элементах (01, 02) в положении, отличающемся от положения А, без поворота самих элементов (01, 02). Аналогично, положение В может отличаться от положения А на любую угловую величину, не ограничиваясь величиной угла в 30 градусов, указанной выше в качестве примера.
На следующем этапе работы осуществляется измерение показаний позиционно-чувствительного детектора (121) в положении В. Далее, по аналогии с описанными выше измерениями в положениях А и В, осуществляются измерения показаний позиционно-чувствительного детектора (121) в отличающихся друг от друга положениях измерительных модулей, вплоть до составления системы уравнений, достаточной для вычисления набора геометрических параметров, характеризующих взаимное расположение в пространстве элементов (01, 02) с заданной степенью точности.
Как уже отмечалось выше, для определения набора геометрических параметров, характеризующих рассогласование элементов (01, 02) в пространстве с заданной точностью, достаточно в каждом из положений А, В и т.д. определять только одну из координат точки падения (изображения) луча (03) в области детектирования на плоскости (122) регистрации позиционно-чувствительного детектора (121).
Необходимым условием измерений с помощью системы (10) является попадание, по меньшей мере, части изображения луча (03) оптического излучения в пределы области детектирования на плоскости (122) регистрации оптического излучения позиционно-чувствительного детектора (121), например, как это изображено на фиг.2. Данное условие однозначно задает диапазон измерений системы (10). Предельная величина упомянутой части изображения луча (которая может характеризоваться, например, отношением оптической мощности, соответствующей части изображения, к полной мощности), достаточная для проведения измерений в системе (10), определяется параметрами системы. А именно: величиной чувствительности детектора, мощностью оптического излучения, формируемого модулем (11) источника, а также затуханием оптической мощности при распространении луча (03) до плоскости (122) регистрации (параметрами среды распространения, например присутствием газов на пути распространения луча).
Согласно варианту осуществления изобретения, на входе модуля (12) детектора, по направлению распространения луча (03) от модуля (11) источника, размещен оптический элемент (123). Оптический элемент (123) обеспечивает преобразование луча (03) до его попадания в область детектирования на плоскости (122) регистрации с целью расширения диапазона измерений системы (10).
На фиг.2 схематически изображена область детектирования в плоскости (122) регистрации детектора (121), а также примерный вид обычного (не преобразованного) изображения (04) луча оптического излучения и примерный вид преобразованного изображения (05) луча (03), согласно настоящему изобретению.
Как можно видеть на фиг.2, в результате упомянутого преобразования с помощью оптического элемента (123), изображение (05) масштабируется с увеличением по одной из координатных осей в плоскости (122) регистрации излучения. Предпочтительно, изображение луча (03) на плоскости (122) преобразуется в световую полосу (05), вместо обычного светового пятна (04), имеющего форму круга. В соответствии с формой преобразованного изображения (05) и геометрическими соотношениями, специалистам в данной области техники должно быть понятно, что часть световой полосы (05) будет попадать в пределы ограниченной геометрической области детектирования на плоскости (122) при большей величине сдвига вдоль, по меньшей мере, одной из координатных осей, заданных в данной плоскости. В частности, как изображено на фиг.2, по координатной оси (06), параллельной световой линии (05). Таким образом, можно сделать вывод, что описанное выше преобразование луча (03) с помощью оптического элемента (123) обеспечивает расширение диапазона детектирования изображения луча (03) по одной из координатных осей на плоскости (122) регистрации. Учитывая, что для определения рассогласования элементов (01, 02) в пространстве достаточно регистрации только одной из координат точки падения луча (03) на плоскость (122) детектора в серии повторяющихся измерений (в положениях А, В и т.д.), упомянутое расширение диапазона детектирования равнозначно увеличению диапазона измерений в системе (10).
Описанное выше и проиллюстрированное на фиг.2 масштабное преобразование изображения луча (03) в плоскости (122) является только одним из возможных вариантов осуществления упомянутого преобразования согласно настоящему изобретению. В общем случае настоящее изобретение включает в себя масштабное преобразование изображения луча (03) на плоскости (122) по двум взаимно перпендикулярным осям, лежащим в плоскости (122) и имеющим отличающиеся друг от друга коэффициенты масштабирования.
При этом, согласно данному варианту осуществления изобретения, в позиционно-чувствительном детекторе (121) регистрируется только одна из координат изображения (05) преобразованного луча, а именно координата расположения оси масштабного преобразования с большим коэффициентом масштабирования. Например, если преобразованное изображение (05) имеет форму световой полосы, в детекторе (121) будет определяться только координата изображения по оси (06), перпендикулярной центральной линии симметрии световой полосы.
Описанное выше преобразование луча (03) осуществляется с помощью оптического элемента (123), размещенного на входе модуля (12) детектора. Более подробно модуль (12) детектора изображен на фиг.3. Отметим, что оптический элемент (123) согласно настоящему изобретению, может обеспечивать преобразование луча (03) оптического излучения как при его прохождении через элемент (123), так и посредством отражения от элемента (123).
В одном из вариантов осуществления изобретения, оптический элемент (123) представляет собой дифракционную решетку и обеспечивает дифракционное разложение проходящего через него луча (03) оптического излучения, однако не ограничивается данным конкретным примером. В другом варианте осуществления, оптический элемент (123) может представлять собой анаморфот (например, плоскую линзу или объектив анаморфот), который, соответственно, обеспечивает анаморфирование изображения луча (03) на плоскости (122) регистрации оптического излучения, посредством преобразования проходящего через него, или отраженного луча (03). Более того, оптический элемент (123) согласно настоящему изобретению не ограничен перечисленными выше примерными вариантами осуществления и может быть реализован с помощью любых подходящих одного или нескольких оптических средств, выполняющих преобразование светового излучения с соответствующим масштабированием изображения луча (03) в плоскости (122) регистрации позиционно-чувствительного детектора (121).
В предпочтительном варианте осуществления позиционно-чувствительный детектор (121) является однокоординатным детектором, что обеспечивает существенное снижение стоимости системы (10). В данном варианте осуществления координатная ось однокоординатного детектора будет соответствовать координатной оси (06), отмеченной на фиг.2.
Однако настоящее изобретение не ограничивается указанным выше вариантом осуществления, поскольку детектор (121) также может представлять собой двухкоординатный детектор, если параметры конкретной решаемой задачи требуют определения двух координат изображения (05) луча.
Вне зависимости от типа позиционно-чувствительного детектора (121), в системе (10) согласно настоящему изобретению достигается упрощение процесса настройки и расширение диапазона измерений, по сравнению с известным уровнем техники.
Согласно варианту осуществления изобретения, модуль (13) обработки представляет собой вычислительное устройство, соединенное с возможностью передачи данных с измерительными модулями (11, 12), которое осуществляет обработку этих данных и вычисляет на их основе набор геометрических параметров, характеризующий рассогласование элементов (01, 02) в пространстве. Модуль (13) обработки может представлять собой любое устройство с возможностью обработки данных, такое как контроллер, процессор, микропроцессор, программируемую интегральную схему и т.д.
В другом варианте осуществления, один или оба измерительных модуля (11, 12) могут содержать средство обработки данных, такое как процессор, и/или средство хранения данных, такое как машиночитаемый носитель любого типа. В этом случае, модуль (13) обработки может быть реализован с помощью программных средств, например, в виде набора машинных кодов, записанных на упомянутом носителе и исполняемых упомянутым процессором.
Кроме того, в одном из вариантов осуществления изобретения, система (10) может содержать вспомогательные модули для осуществления сбора данных из измерительных модулей (11, 12) и модуля (13) обработки, их передачи, хранения и представления пользователю. В числе упомянутых вспомогательных модулей, система (10) может содержать интерфейс для обмена данными между компонентами системы с помощью проводного и/или беспроводного соединения. Аналогично, система (10) может включать в себя средство передачи данных, выполненное с возможностью передачи данных, полученных в измерительных модулях (11, 12) и/или модуле (13) обработки, стороннему устройству с помощью проводного и/или беспроводного соединения.
Также система (10) может содержать запоминающее устройство, выполненное с возможностью сохранения данных, полученных в измерительных модулях (11, 12) и/или модуле (13) обработки, которое может быть выполнено как часть одного из модулей (11, 12, 13) системы (10), или же как отдельное устройство.
Далее система (10) может включать в себя модуль отображения, выполненный с возможностью представления данных, полученных в измерительных модулях (11, 12) и/или модуле (13) обработки, пользователю в графической и/или другой доступной для восприятия форме.
Все упомянутые выше вспомогательные модули могут быть реализованы любыми программно-аппаратными средствами, известными в уровне техники. Причем в разных вариантах осуществления, упомянутые вспомогательные модули могут быть реализованы в качестве составных частей, по меньшей мере, одного из измерительных модулей (11, 12) и модуля (13) обработки.
В соответствии с принципами, изложенными выше в варианте осуществления изобретения в виде оптической измерительной системы (10), настоящее изобретение предусматривает также способ определения взаимного расположения, по меньшей мере, двух элементов в пространстве, с помощью оптической измерительной системы (10). Этапы заявляемого способа, конкретно изложенные в формуле изобретения, полностью соответствуют функциональным возможностям элементов системы (10) и выполняются с помощью этих элементов. Поэтому подробное описание способа определения взаимного расположения элементов в пространстве согласно настоящему изобретению опущено здесь для краткости.
Также, заявленное изобретение включает в себя устройство регистрации оптического излучения для использования в системе (10) в качестве модуля (12) детектора, примерный вариант осуществления которого изображен на фиг.3. Соответственно, описание элементов упомянутого устройства регистрации оптического излучения, подробно изложенное в нижеследующей формуле изобретения, полностью повторяет описание соответствующих элементом модуля (12) детектора (т.е. измерительного модуля (12)). Поэтому подробное описание устройства регистрации оптического излучения согласно настоящему изобретению опущено здесь для краткости.
Для специалистов в данной области техники будет понятно, что функциональные возможности описанных выше модулей системы (10), и/или устройства регистрации оптического излучения, а также действия соответствующих этапов способа согласно настоящему изобретению, могут быть реализованы с помощью программных средств, в частности с помощью машинных кодов, сохраненных на машиночитаемом носителе, которые исполняются вычислительным устройством, например процессором.
Кроме того, необходимо отметить, что не все из описанных выше компонентов системы (10) являются необходимыми для достижения технического результата настоящего изобретения, поэтому могут быть исключены из системы (10) в определенном варианте изобретения.
Учитывая все вышесказанное, настоящее описание вариантов осуществления изобретения не должно интерпретироваться в ограничительном плане, поскольку содержит только примеры осуществления аспектов изобретения, приведенные с целью объяснения ключевых аспектов настоящего изобретения. Соответственно, объем изобретения определяется только нижеследующей формулой изобретения, и любые измерения в описанных выше вариантах осуществления изобретения, которые могут быть предложены специалистами в данной области техники после прочтения данного описания, должны рассматриваться, как попадающие в объем настоящего изобретения.
Система содержит модуль обработки, первый измерительный модуль, закрепляемый на первом из элементов и содержащий блок излучения для луча оптического излучения, второй измерительный модуль, закрепляемый на втором из элементов и содержащий позиционно-чувствительный детектор для определения по меньшей мере одной координаты изображения луча в прямоугольной системе координат в пределах области детектирования на плоскости регистрации детектора, и оптический элемент, обеспечивающий преобразование луча до его попадания в область детектирования на плоскости регистрации. В результате преобразования изображение луча на плоскости регистрации масштабно преобразуется по двум взаимно перпендикулярным осям, лежащим в этой плоскости и имеющим отличающиеся друг от друга коэффициенты масштабирования, причем упомянутая координата изображения преобразованного луча представляет собой координату, определяющую положение соответствующей одной из упомянутых осей масштабирования в прямоугольной системе координат на упомянутой плоскости регистрации. Технический результат - упрощение процесса настройки, увеличение диапазона измерений и уменьшение стоимости системы. 3 н. и 34 з.п. ф-лы, 3 ил.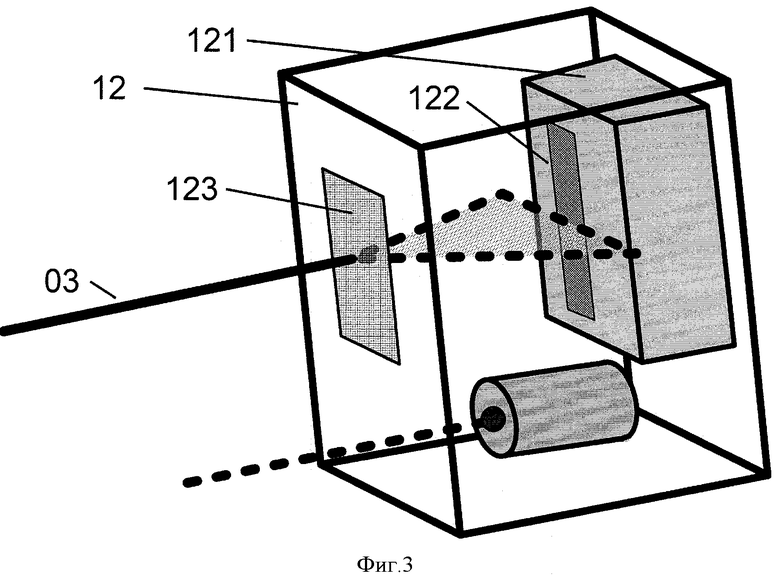
1. Способ определения взаимного расположения, по меньшей мере, двух элементов в пространстве с помощью оптической измерительной системы, содержащей, по меньшей мере, два измерительных модуля, выполненных с возможностью закрепления на упомянутых элементах, содержащий этапы, на которых:
формируют с помощью первого измерительного модуля луч оптического излучения, направленный в сторону второго измерительного модуля;
обеспечивают попадание луча оптического излучения в область детектирования на плоскости регистрации оптического излучения позиционно-чувствительного детектора оптического излучения во втором измерительном модуле;
определяют с помощью упомянутого позиционно-чувствительного детектора, по меньшей мере, одну координату изображения луча оптического излучения в прямоугольной системе координат в пределах области детектирования на плоскости регистрации оптического излучения детектора; и
вычисляют, по меньшей мере, один геометрический параметр, характеризующий взаимное расположение упомянутых, по меньшей мере, двух элементов в пространстве на основании упомянутой, по меньшей мере, одной координаты;
отличающийся тем, что способ содержит этап, на котором:
осуществляют преобразование сформированного луча оптического излучения с помощью оптического элемента во втором измерительном модуле до его попадания в упомянутую область детектирования на плоскости регистрации,
причем в результате упомянутого преобразования луча оптического излучения с помощью оптического элемента изображение луча оптического излучения на плоскости регистрации масштабно преобразуется по двум взаимно перпендикулярным осям, лежащим в этой плоскости и имеющим отличающиеся друг от друга коэффициенты масштабирования,
причем упомянутая координата изображения преобразованного луча оптического излучения представляет собой координату, определяющую положение соответствующей одной из упомянутых осей масштабирования в прямоугольной системе координат на упомянутой плоскости регистрации.
2. Способ по п.1, в котором упомянутое преобразование луча оптического излучения представляет собой дифракционное разложение, осуществляемое с помощью дифракционной решетки.
3. Способ по п.1, в котором упомянутое преобразование луча оптического излучения представляет собой анаморфирование, осуществляемое с помощью анаморфота.
4. Способ по п.1, в котором упомянутый этап определения, по меньшей мере, одной координаты изображения луча оптического излучения повторяют два или более раз,
причем упомянутый этап вычисления содержит вычисление упомянутого, по меньшей мере, одного геометрического параметра на основании соответствующих двух или более координат, полученных в результате упомянутого повторения.
5. Способ по п.4, в котором упомянутое повторение этапа определения, по меньшей мере, одной координаты изображения луча оптического излучения выполняется после изменения положения в пространстве упомянутых элементов и/или измерительных модулей.
6. Способ по п.5, в котором упомянутое изменение положения в пространстве представляет собой поворот упомянутых элементов и/или измерительных модулей вокруг соответствующих осей вращения.
7. Способ по п.1, дополнительно содержащий этап, на котором осуществляют дополнительное преобразование луча оптического излучения с помощью одного или более оптических средств, причем упомянутое дополнительное преобразование выполняется до и/или после упомянутого этапа осуществления преобразования.
8. Способ по п.1, дополнительно содержащий этап, на котором данные, полученные в результате упомянутого этапа определения и/или упомянутого этапа вычисления, представляют пользователю в графической и/или другой доступной для восприятия форме.
9. Способ по п.1, дополнительно содержащий этап, на котором данные, полученные в результате упомянутого этапа определения и/или упомянутого этапа вычисления, передают стороннему устройству с помощью проводного и/или беспроводного соединения.
10. Оптическая измерительная система для определения взаимного расположения, по меньшей мере, двух элементов в пространстве, содержащая:
первый измерительный модуль, выполненный с возможностью закрепления на первом из упомянутых элементов и содержащий блок излучения, выполненный с возможностью формирования направленного луча оптического излучения;
второй измерительный модуль, выполненный с возможностью закрепления на втором из упомянутых элементов и содержащий позиционно-чувствительный детектор, выполненный с возможностью определения, по меньшей мере, одной координаты изображения луча оптического излучения в прямоугольной системе координат в пределах области детектирования на плоскости регистрации оптического излучения детектора; и
модуль обработки, выполненный с возможностью получения данных от первого и второго измерительных модулей, включающих в себя упомянутую, по меньшей мере, одну координату, и возможностью вычисления, по меньшей мере, одного геометрического параметра, характеризующего взаимное расположение упомянутых, по меньшей мере, двух элементов в пространстве на основании упомянутых данных;
отличающаяся тем, что второй измерительный модуль содержит:
оптический элемент, обеспечивающий преобразование луча оптического излучения до его попадания в упомянутую область детектирования на плоскости регистрации,
причем в результате упомянутого преобразования луча оптического излучения с помощью оптического элемента изображение луча оптического излучения на плоскости регистрации масштабно преобразуется по двум взаимно перпендикулярным осям, лежащим в этой плоскости и имеющим отличающиеся друг от друга коэффициенты масштабирования,
причем упомянутая координата изображения преобразованного луча оптического излучения представляет собой координату, определяющую положение соответствующей одной из упомянутых осей масштабирования в прямоугольной системе координат на упомянутой плоскости регистрации.
11. Система по п.10, в которой упомянутый оптический элемент представляет собой дифракционную решетку и осуществляет дифракционное разложение.
12. Система по п.10, в которой упомянутый оптический элемент представляет собой анаморфот и осуществляет анаморфирование изображения луча оптического излучения на упомянутой плоскости регистрации.
13. Система по п.10, в которой второй измерительный модуль выполнен с возможностью повторения упомянутого определения, по меньшей мере, одной координаты изображения луча оптического излучения два или более раз,
причем модуль обработки дополнительно выполнен с возможностью вычисления упомянутого, по меньшей мере, одного геометрического параметра на основании двух или более координат, полученных в результате упомянутого повторения.
14. Система по п.13, в которой упомянутое повторение определения, по меньшей мере, одной координаты изображения луча оптического излучения выполняется после изменения положения в пространстве упомянутых элементов и/или измерительных модулей.
15. Система по п.14, в которой упомянутое изменение положения в пространстве представляет собой поворот упомянутых элементов и/или измерительных модулей вокруг соответствующих осей вращения.
16. Система по п.10, в которой второй измерительный модуль дополнительно содержит одно или несколько вспомогательных оптических средств, выполненных с возможностью дополнительного преобразования луча оптического излучения, которые располагаются перед и/или после упомянутого оптического элемента по направлению распространения луча оптического излучения.
17. Система по п.10, дополнительно содержащая интерфейс для обмена данными между компонентами системы с помощью проводного и/или беспроводного соединения.
18. Система по п.10, дополнительно содержащая запоминающее устройство, выполненное с возможностью сохранения данных, полученных в измерительных модулях и/или модуле обработки.
19. Система по п.10, дополнительно содержащая модуль отображения, выполненный с возможностью представления данных, полученных в измерительных модулях и/или модуле обработки, пользователю в графической и/или другой доступной для восприятия форме.
20. Система по п.10, дополнительно содержащая средство передачи данных, выполненное с возможностью передачи данных, полученных в измерительных модулях и/или модуле обработки, стороннему устройству с помощью проводного и/или беспроводного соединения.
21. Система по одному из пп.18-20, в которой, по меньшей мере, одно из упомянутых запоминающего устройства, модуля отображения и средства передачи входит в состав модуля обработки.
22. Система по п.10, в которой первый измерительный модуль дополнительно содержит позиционно-чувствительный детектор и оптический элемент для преобразования луча оптического излучения, аналогичные таковым во втором измерительном модуле.
23. Система по п.10, в которой второй измерительный модуль дополнительно содержит блок излучения, аналогичный таковому в первом измерительном модуле.
24. Система по п.10, в которой первый и/или второй измерительный модуль дополнительно содержит процессор и запоминающее устройство.
25. Система по п.24, в которой модуль обработки реализован с помощью программных средств, сохраненных в запоминающем устройстве первого и/или второго измерительного модуля и исполняемых процессором первого и/или второго измерительного модуля.
26. Устройство регистрации оптического излучения в оптической измерительной системе для определения взаимного расположения, по меньшей мере, двух элементов в пространстве, выполненное с возможностью закрепления на втором элементе из упомянутых элементов, причем упомянутая система содержит источник оптического излучения, выполненный с возможностью закрепления на первом элементе из упомянутых элементов и формирования направленного луча оптического излучения, причем устройство содержит:
позиционно-чувствительный детектор, выполненный с возможностью определения, по меньшей мере, одной координаты изображения луча оптического излучения от источника оптического излучения в прямоугольной системе координат в пределах области детектирования на плоскости регистрации оптического излучения детектора,
причем упомянутая, по меньшей мере, одна координата характеризует расположение в пространстве данного устройства регистрации по отношению к упомянутому источнику оптического излучения;
отличающееся тем, что устройство содержит:
оптический элемент, обеспечивающий преобразование луча оптического излучения до его попадания в упомянутую область детектирования на плоскости регистрации,
причем в результате упомянутого преобразования луча оптического излучения с помощью оптического элемента изображение луча оптического излучения на плоскости регистрации масштабно преобразуется по двум взаимно перпендикулярным осям, лежащим в этой плоскости и имеющим отличающиеся друг от друга коэффициенты масштабирования,
причем упомянутая координата изображения преобразованного луча оптического излучения представляет собой координату, определяющую положение соответствующей одной из упомянутых осей масштабирования в прямоугольной системе координат на упомянутой плоскости регистрации.
27. Устройство по п.26, дополнительно содержащее источник оптического излучения, выполненный с возможностью формирования направленного луча оптического излучения.
28. Устройство по п.26, в котором упомянутый оптический элемент представляет собой дифракционную решетку и осуществляет дифракционное разложение.
29. Устройство по п.26, в котором упомянутый оптический элемент представляет собой анаморфот и осуществляет анаморфирование изображения луча оптического излучения на упомянутой плоскости регистрации.
30. Устройство по п.26, в котором позиционно-чувствительный детектор выполнен с возможностью повторения упомянутого определения, по меньшей мере, одной координаты изображения луча оптического излучения два или более раз.
31. Устройство по п.30, в котором упомянутое повторение определения, по меньшей мере, одной координаты изображения луча оптического излучения выполняется после изменения положения в пространстве упомянутых элементов.
32. Устройство по п.31, в котором упомянутое изменение положения в пространстве представляет собой поворот упомянутых элементов вокруг соответствующих осей вращения.
33. Устройство по п.26, дополнительно содержащее одно или несколько вспомогательных оптических средств, выполненных с возможностью дополнительного преобразования луча оптического излучения, которые располагаются перед и/или после упомянутого оптического элемента по направлению распространения луча оптического излучения.
34. Устройство по п.26, дополнительно содержащее запоминающее устройство, выполненное с возможностью хранения данных, полученных позиционно-чувствительным детектором.
35. Устройство по п.26, дополнительно содержащее модуль отображения, выполненный с возможностью представления данных, полученных позиционно-чувствительным детектором, пользователю в графической и/или другой доступной для восприятия форме.
36. Устройство по п.26, дополнительно содержащее средство передачи данных, выполненное с возможностью передачи данных, полученных позиционно-чувствительным детектором, стороннему устройству с помощью проводного и/или беспроводного соединения.
37. Устройство по любому из пп.26-36, дополнительно содержащее вычислительный модуль, выполненный с возможностью обработки данных, полученных позиционно-чувствительным детектором, для вычисления, по меньшей мере, одного геометрического параметра, характеризующего расположение в пространстве упомянутого второго элемента по отношению к упомянутому первому элементу.
| US 2002063859 A1, 30.05.2002 | |||
| US 2004190005 A1, 30.09.2004 | |||
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2002 |
|
RU2244904C2 |
| US 4518855 A, 21.05.1985 | |||
| US 2009211105 A1, 27.08.2009. | |||

