Настоящая группа изобретений относится к контрольно-измерительной технике и может быть использована для контроля железнодорожного пути, в частности для определения отклонения железнодорожного пути от проектного положения.
Известна оптико-электронная система для контроля пространственного положения железнодорожного пути (RU 2387561, опубл. 27.04.2010, МПК6 В61К 9/08, Е01В 35/00), включающая по меньшей мере один источник излучения, измерительную тележку, установленную на рельсовом пути, на которой расположены блок обработки и фотоприемный блок, оптически связанный с источником излучения, отличающаяся тем, что источник излучения выполнен с возможностью его установки на конструкциях, вынесенных за пределы рельсового пути и расположенных по ходу движения измерительной тележки, при этом фотоприемный блок содержит две приемно-анализирующие системы, датчик угла наклона фотоприемного блока, модуль управления, выход которого соединен со входом блока обработки, другой вход которого соединен с выходом датчика угла наклона фотоприемного блока, и индикатор прохождения измерительной тележкой источника излучения, выход которого соединен со входом модуля управления, причем каждая приемно-анализирующая система включает объектив и позиционно-чувствительный приемник оптического излучения, установленный в плоскости анализа изображения источника излучения и выход которого соединен с входом блока обработки.
Из описания этой системы известен способ контроля положения железнодорожного пути, заключающийся в том, что в момент прохождения измерительной тележкой реперной марки, который определяется индикатором по возвращенному сигналу от отражателя, индикатор вырабатывает сигнал захвата кадров оптическими приемно-анализирующими системами. Этот сигнал поступает в блок обработки, после чего в модулях памяти каждого измерительного канала сохраняются кадры, поступившие в данный момент от оптических приемно-анализирующих систем и содержащие изображения источника излучения (реперной марки). Определение смещений источника излучения относительно базовой точки приборной системы координат в вертикальном и продольном направлениях выполняется в два этапа. Вначале в блоке обработки вычисляются вертикальные координаты «энергетических центров тяжести» изображений в пикселях. Затем на основании математической модели рассчитываются смещения относительно базовой точки, определяющие пространственное положение железнодорожного пути.
Эти известные способ и система выбираются в качестве прототипов для заявляемых способа и системы, соответственно, так как они имеют наибольшее число существенных признаков, совпадающих с существенными признаками заявляемых технических решений.
Однако известные способ и система имеют существенный недостаток, а именно высокая погрешность определения положения пути, обусловленная тем, что используется один контрольный элемент (источник излучения на реперной марке), это, в свою очередь, вносит ограничение на количество измеряемых координат. Кроме того, эффективность детектирования реперной марки определяется не только качеством настройки индикатора, но и зависит от однородности характеристик отражателя реперной марки, а также от погодных условий работы системы (например, капли дождя на реперной марке могут привести к тому, что излучение узкого пучка лучей лазерного датчика не вернется на приемник индикатора прохождения измерительной тележкой источника излучения), что в разы увеличивает вероятность необнаружения марки. Также ложное детектирование возможно в случае попадания в поле зрения указанного индикатора помехи, схожей по отражательным характеристикам с реперной маркой, что приведет к неверному определению координат положения пут в эти точке.
Задачей настоящей группы изобретений является создание нового способа контроля положения железнодорожного пути и системы, его реализующей, позволяющие достичь следующего технического результата, а именно, уменьшение погрешности определения положения железнодорожного пути.
Поставленная задача в части способа решена за счет того, что в известном способе контроля пространственного положения железнодорожного пути, включающем получение двух изображений пространства, прилегающего к пути, деактирование реперной марки на полученных изображениях, определение координат контрольного элемента реперной марки, определение величин смещений контрольного элемента относительно базовой точки приборной системы координат в вертикальном и продольном направлениях, измерение угла поворота вокруг поперечной оси, корректировку полученных величин смещений с учетом измеренного угла, определение положения пути, согласно настоящему изобретению дополнительно определяют смещение контрольного элемента относительно базовой точки приборной системы координат в поперечном направлении, причем применяют реперную марку, содержащую массив контрольных элементов, предварительно измеряют взаимное пространственное расположение элементов массива, которое сравнивают с совокупностью полученных значений смещений каждого контрольного элемента относительно базовой точки приборной системы координат, на основании результатов сравнения определяют величины смешений реперной марки в вертикальном, продольном и поперечном направлениях, а также дополнительно определяют углы поворота реперной марки вокруг вертикальной и продольной осей, дополнительно корректируют полученные величины смещений с учетом полученных значений углов поворота, по которым и определяют положение пути.
Поставленная задача в части системы решена за счет того, что в известной системе контроля пространственного положения железнодорожного пути, включающей выполненные с возможностью расположения на измерительной тележке, установленной на рельсовом пути, блок обработки и управления и фотоприемный блок, оптически связанный с реперной маркой, выполненной с возможностью ее установки на конструкциях, вынесенных за пределы рельсового пути и расположенных по ходу движения измерительной тележки, при этом фотоприемный блок содержит две приемно-анализирующие системы, датчик угла наклона фотоприемного блока, выход которого соединен со входом блока обработки и управления, причем каждая приемно-анализирующая система включает объектив и позиционно-чувствительный приемник оптического излучения, установленный в плоскости анализа изображения реперной марки и выход которого соединен с входом блока обработки и управления, согласно настоящему изобретению фотоприемный блок дополнительно содержит осветительный модуль, соединенный с блоком обработки и управления, при этом реперная марка оптически сопряжена с осветительным модулем и выполнена с образованием массива контрольных элементов, количество которых не менее числа точек, однозначно определяющих форму реперной марки.
Таким образом, заявляемые технические решения всей своей совокупностью существенных признаков позволяют уменьшить погрешность определения положения пути за счет обеспечения возможности измерения всех шести координат (три линейные и три угловые) и последующей коррекции линейных смещений с учетом трех углов поворота реперной марки, а также за счет аппроксимации восстановленных в пространство предметов координат метрологически значимых признаков (контрольных элементов) реперной марки пространственной фигурой, соответствующей форме марки, сопоставлением результата аппроксимации с шаблоном (предварительно измеренное взаимное пространственное расположение элементов массива реперной марки), и повторением операций аппроксимации и сопоставления для оставшихся координат с вычислением величин смещений и углов поворота. Возможность шестикоординатного измерения обеспечена за счет выполнения реперной марки с образованием массива контрольных элементов, количество которых не менее числа точек, однозначно определяющих форму реперной марки. С помощью осветительного модуля подсвечивают реперную марку для создания оптимального отношения сигнал-шум в приемно-анализирующей системе, что повышает вероятность правильного обнаружения (детектирования) марки.
Сущность заявляемого способа и системы, его реализующей, и возможность их практической реализации поясняется приведенным ниже описанием и чертежом.
На чертеже представлена структурная схема системы контроля положения железнодорожного пути, где:
1 - блок обработки и управления;
2 - фотоприемный блок;
3 - реперная марка;
4 - приемно-анализирующая система;
5 - датчик угла наклона;
6 - объектив;
7 - позиционно-чувствительный приемник;
8 - осветительный модуль;
9 - контрольные элементы;
10 - оптический фильтр.
Система контроля пространственного положения железнодорожного пути включает выполненные с возможностью расположения на измерительной тележке (на чертеже не показано), установленной на рельсовом пути (на чертеже не показано), блок 1 обработки и управления и фотоприемный блок 2, оптически связанный с реперной маркой 3, выполненной с возможностью ее установки на конструкциях (на чертеже не показано), вынесенных за пределы рельсового пути (на чертеже не показано) и расположенных по ходу движения измерительной тележки (на чертеже не показано), при этом фотоприемный блок 2 содержит две приемно-анализирующие системы 4, датчик 5 угла наклона фотоприемного блока 2, выход которого соединен со входом блока 1 обработки и управления. Каждая приемно-анализирующая система 4 включает объектив 6 и позиционно-чувствительный приемник 7 оптического излучения, установленный в плоскости анализа изображения реперной марки 3 и выход которого соединен с входом блока 1 обработки и управления. При этом фотоприемный блок 2 дополнительно содержит осветительный модуль 8, соединенный с блоком 1 обработки и управления, а реперная марка 3 оптически сопряжена с осветительным модулем 8 и выполнена с образованием массива контрольных элементов 9, количество которых не менее числа точек, однозначно определяющих форму реперной марки 3. Для спектрального согласования приемно-анализирующей системы 4 и излучения осветительного модуля 8 в состав каждой приемно-анализирующей системы 4 может входить оптический фильтр 10.
Фотоприемный блок 2 (стереоскопического типа) состоит из двух оптических приемно-анализирующих систем 4, служащих для приема оптического изображения от реперной марки 3 и дальнейшего его преобразования в цифровые электрические сигналы. Каждая из оптических приемно-анализирующих систем 4 включает объектив 6 и позиционно-чувствительный приемник оптического излучения 7, установленный в плоскости анализа изображения реперной марки 3. Причем оптические оси этих систем пересекаются в точке максимальной дальности измерения.
Угол поворота фотоприемного блока 2 относительно поперечной оси контролируется с помощью датчика 5 угла наклона, например с помощью инклинометра.
Совокупные данные от оптических приемно-анализирующих систем 4 и от датчика 5 угла наклона поступают в блок 1 обработки и управления, который может быть дистанционно связан с центральным блоком обработки (ЦБО).
Массив контрольных элементов 9 на реперной марке 3 может быть образован, например, с помощью трафарета (на чертеже не показано), нанесенного, например, на отражатель или рассеиватель (на чертеже не показано), расположенный на основании, выполненном с возможностью крепления на конструкциях (на чертеже не показано), вынесенных за пределы рельсового пути (на чертеже не показано), например, опорах контактной сети или других конструкциях, расположенных вдоль железнодорожного пути но ходу движения машины и геодезические координаты которых определены. Трафарет (на чертеже не показано) выполнен с возможностью пространственной модуляции излучения, отраженного от отражателя (на чертеже не показано), и образован, например, слоем прозрачного материала, на который водостойкой краской нанесен узор, или слоем непрозрачного материала с отверстиями произвольной формы. Причем взаимное пространственное расположение элементов массива априорно известно. К конструкциям (на чертеже не показано) реперная марка 3 может быть прикреплена любыми известными способами.
Осветительный модуль 8 работает в импульсном режиме и может быть выполнен в виде набора источников излучения, спектр излучения которых согласован со спектральной характеристикой позиционно-чувствительных приемников оптического излучения и спектром пропускания оптического фильтра, и формирователя угловой расходимости их излучения, выполненного в виде, например, зеркального отражателя, отражающая поверхность которого выполнена в виде поверхности второго порядка. При этом источники излучения могут быть диодными, лазерными, лампами накаливания или любыми другими, однако спектральный состав их излучения должен быть согласован со свойствами материала марки 3 отражать (рассеивать) излучение этого спектрального состава, и полосой пропускания оптического фильтра 10, угол расходимости излучения должен быть достаточен, чтобы покрыть весь диапазон измерений (все возможные положения реперной марки 3), а мощность излучения должна быть достаточна для формирования на поверхности позиционно-чувствительных приемников 7 облученности в изображении реперной марки 3, достаточной для ее детектирования и необходимых измерений.
Осветительный модуль 8 может быть выполнен в виде одного блока, расположенного между приемно-анализирующими системами 4 или в виде совокупности двух блоков, каждый из которых расположен в каждой приемно-анализирующей системе 4. Выбор варианта выполнения осветительного модуля 8 обусловлен диаграммой направленности световозвращения реперной марки 3.
С помощью данной системы осуществляют следующий способ контроля положения пути, заключающийся в том, что с помощью приемно-анализирующих систем 4 получают два изображения пространства, прилегающего к пути (на чертеже не показано). С помощью блока 1 обработки и управления осуществляют деактирование реперной марки 3 на полученных изображениях и определение координат контрольных элементов 9 реперной марки 3, предварительно измерив взаимное пространственное расположение контрольных элементов 9. Затем определяют величины смещений контрольных элементов 9 относительно базовой точки приборной системы координат в вертикальном, продольном и поперечном направлениях, определяют углы поворота реперной марки 3 вокруг вертикальной и продольной осей, а также измеряют угол поворота системы вокруг поперечной оси. Причем углы поворота реперной марки 3 вокруг вертикальной и продольной осей определяют углы поворота системы вокруг соответствующих осей.
Совокупность полученных значений смещений каждого контрольного элемента 9 относительно базовой точки приборной системы координат сравнивают с предварительно измеренным взаимным пространственным расположением элементов массива. На основании результатов этого сравнения определяют величины смещений реперной марки 3 в вертикальном, продольном и поперечном направлениях. Производят корректировку полученных величин смещений с учетом полученных значений углов поворота, например, по следующему выражению:

где X, Y, Ζ - координаты смещений ренерной марки 3 в поперечном, вертикальном и продольном направлениях, α,β,γ - углы поворота реперной марки 3 относительно осей поперечного, вертикального и продольного направлений, Xкорр, Yкорр, Zкорр - скорректированные с учетом полученных значений углов поворота координаты смещения реперной марки 3 в поперечном, вертикальном и продольном направлениях, по которым и определяют положение пути с учетом взаимного расположения системы, измерительной 'тележки и рельсового пути.
Заявляемые способ и система, его реализующая, работают следующим образом.
Блок 1 обработки и управления считывает с датчика 5 угла наклона угол поворота системы относительно поперечного направления. Далее блок 1 обработки и управления с некоторой частотой формирует сигнал включения осветительного модуля 8, который освещает реперную марку 3. Сформированные приемно-анализирующими системами 4 изображения реперной марки 3 сохраняют в памяти блока 1 обработки и управления. После этого блок 1 обработки и управления вырабатывает сигнал выключения осветительного модуля 8 и проводит анализ сохраненных изображений на предмет наличия изображения реперной марки 3. Если хотя бы на одном из сохраненных изображений присутствует изображение реперной марки 3, то на обоих сохраненных изображениях производят определение положения метрологически значимых элементов, а именно координат изображений контрольных элементов 10. Далее по найденным координатам определяют положение всех контрольных элементов 10 в пространстве предметов, например, методом триангуляции. Поскольку в полученных таким образом трехмерных координатах содержится ошибка, вызванная как погрешностью определения координат изображений контрольных элементов 10, так и ошибками восстановления в пространство предметов (триангуляции), то полученные трехмерные координаты контрольных элементов 10 аппроксимируют некоторой пространственной фигурой, соответствующей априорно известной поверхности расположения контрольных элементов 10 в пространстве, например плоскости. После этого найденные трехмерные координаты контрольных элементов 10 проецируют на эту пространственную фигуру. Полученные таким образом уточненные трехмерные координаты контрольных элементов 10 сравнивают с трехмерным шаблоном, соответствующим априорно известному расположению контрольных элементов 10 реперной марки 3 в пространстве. Поскольку координаты трехмерного шаблона заданы относительно начала приборной системы координат, то результатом сравнения является подобранные углы поворота и трехмерное смещение шаблона относительно базовой точки приборной системы координат и априорно выбранной начальной ориентации этого шаблона. Углы поворота и трехмерное смещение подбирают по принципу наибольшего совпадения с уточненными трехмерными координатами контрольных элементов 10 реперной марки 3, что определяет величину смещения реперной марки 3 относительно поперечного, вертикального и продольного направлений. Найденные величины смещения реперной марки 3 и углов поворота вокруг продольного и вертикального направления, а также угла поворота системы относительно поперечного направления, полученного от датчика 5 угла поворота, используют для коррекции результатов, например, по приведенной выше формуле.
Для улучшения результатов измерения этапы аппроксимации, проецирования и сравнения с шаблоном могут повторяться несколько раз после предварительного отбрасывания координат изображений некоторого количества контрольных элементов 10 реперной марки 3 из рассмотрения.
Таким образом, достигается технический результат заявляемой группы изобретений, а именно уменьшение погрешности определения положения железнодорожного пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2387561C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2424932C1 |
| Способ автоматического контроля состояния рельсовых плетей бесстыкового пути и система для его реализации | 2015 |
|
RU2636200C2 |
| Система для контроля геометрии рельсового пути | 2022 |
|
RU2784216C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2256575C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2492420C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2020 |
|
RU2740485C1 |
Настоящая группа изобретений относится к контрольно-измерительной технике и может быть использована для контроля железнодорожного пути, в частности для определения отклонения железнодорожного пути от проектного положения. Способ контроля положения железнодорожного пути заключается в том, что с помощью приемно-анализирующих систем получают два изображения пространства, прилегающего к пути. С помощью блока обработки и управления осуществляют детектирование реперной марки на полученных изображениях и определение координат контрольных элементов реперной марки, предварительно измерив взаимное пространственное расположение контрольных элементов. Затем определяют величины смещений контрольных элементов относительно базовой точки приборной системы координат в вертикальном, продольном и поперечном направлениях, определяют углы поворота реперной марки вокруг вертикальной и продольной осей, а также измеряют угол поворота системы вокруг поперечной оси. Совокупность полученных значений смещений каждого контрольного элемента относительно базовой точки приборной системы координат сравнивают с предварительно измеренным взаимным пространственным расположением элементов массива. На основании результатов этого сравнения определяют величины смещений реперной марки в вертикальном, продольном и поперечном направлениях. Производят корректировку полученных величин смещений с учетом полученных значений углов поворота и определяют положение пути. В результате уменьшается погрешность определения положения железнодорожного пути. 2 н.п. ф-лы, 1 ил.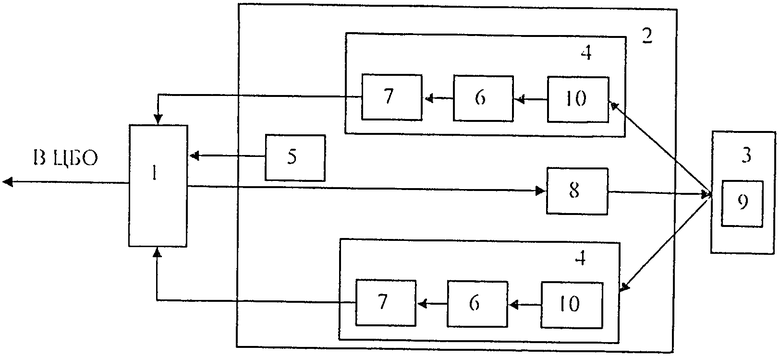
1. Способ контроля пространственного положения железнодорожного пути, включающий получение двух изображений пространства, прилегающего к пути, детектирование реперной марки на полученных изображениях, определение координат контрольного элемента реперной марки, определение величин смещений контрольного элемента относительно базовой точки приборной системы координат в вертикальном и продольном направлениях, измерение угла поворота вокруг поперечной оси, корректировку полученных величин смещений с учетом измеренного угла, определение положения пути, отличающийся тем, что дополнительно определяют смещение контрольного элемента относительно базовой точки приборной системы координат в поперечном направлении, причем применяют реперную марку, содержащую массив контрольных элементов, предварительно измеряют взаимное пространственное расположение элементов массива, которое сравнивают с совокупностью полученных значений смещений каждого контрольного элемента относительно базовой точки приборной системы координат, на основании результатов сравнения определяют величины смещений реперной марки в вертикальном, продольном и поперечном направлениях, а также дополнительно определяют углы поворота реперной марки вокруг вертикальной и продольной осей, дополнительно корректируют полученные величины смещений с учетом полученных значений углов поворота, по которым и определяют положение пути.
2. Система контроля пространственного положения железнодорожного пути, включающая выполненные с возможностью расположения на измерительной тележке, установленной на рельсовом пути, блок обработки и управления и фотоприемный блок, оптически связанный с реперной маркой, выполненной с возможностью ее установки на конструкциях, вынесенных за пределы рельсового пути и расположенных по ходу движения измерительной тележки, при этом фотоприемный блок содержит две приемно-анализирующие системы, датчик угла наклона фотоприемного блока, выход которого соединен со входом блока обработки и управления, причем каждая приемно-анализирующая система включает объектив и позиционно-чувствительный приемник оптического излучения, установленный в плоскости анализа изображения реперной марки и выход которого соединен с входом блока обработки и управления, отличающимся тем, что фотоприемный блок дополнительно содержит осветительный модуль, соединенный с блоком обработки и управления, при этом реперная марка оптически сопряжена с осветительным модулем и выполнена с образованием массива контрольных элементов, количество которых не менее числа точек, однозначно определяющих форму реперной марки.
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2387561C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2424932C1 |
| Прибор для изучения характера движения минеральных зерен при гравитационных методах обогащения | 1954 |
|
SU99758A1 |
| Ручной прибор для ощипывания шишек хмеля | 1939 |
|
SU58484A1 |
| EP 1970278 A1, 17.09.2008 | |||

