Изобретение относится к области электромашиностроения и может использоваться в качестве электродвигателя в системах управления.
Известен бесконтактный электродвигатель постоянного тока, называемый также вентильным электродвигателем (В.В.Хрущев Электрические машины систем автоматики Л.: Энергоатомиздат. Ленинградское отделение, 1985, 368 с., см. на стр.136). По своей конструкции этот тип электродвигателей имеет значительное сходство с синхронными электродвигателями, в связи с чем в различных источниках отсутствует единство терминологии в обозначении составляющих его конструктивных элементов. Дальнейшее изложение осуществляется в соответствии с подходом, принятым в указанном выше источнике. При этом подходе бесконтактный электродвигатель рассматривается как машина постоянного тока, в которой внешний бесконтактный коммутатор поддерживает направление намагничивающей силы обмотки, перпендикулярное оси магнитного потока возбуждения. Электродвигатель-аналог содержит активный ротор, снабженный постоянными магнитами, создающий магнитный поток возбуждения. Многофазная обмотка статора и его магнитная система аналогична статору машины переменного тока, например синхронной. Каждая фаза статорной обмотки получает питание от внешнего полупроводникового коммутатора, который управляется датчиком положения ротора (ДПР) и, в свою очередь, получает питание от внешнего источника постоянного тока достаточной мощности. В качестве ДПР используются или датчики Холла или оптоэлектронные датчики, которые являются устройствами выдающими релейный выходной игнал, и поэтому обеспечивают работу коммутатора в ключевом режиме, что приводит к возникновению пульсаций момента на выходном валу электродвигателя. Данное обстоятельство является недостатком электродвигателя-аналога при его использовании, например, в прецизионных следящих системах.
Наиболее близким по совокупности существенных признаков к изобретению является техническое решение в варианте трехфазной машины по описанию изобретения к авторскому свидетельству SU 1734172 А1, опубл. 15.05.92, бюл.18, которое принимается за аналог-прототип. В рамках принятой выше терминологии (отличающейся от авторской, использованной при описании прототипа) электродвигатель-прототип содержит активный ротор, снабженный постоянными магнитами и статор с магнитной системой и трехфазной обмоткой, аналогичный статору машины переменного тока, например синхронной. В качестве датчика положения ротора использован сельсин, ротор которого связан по углу поворота с валом ротора электродвигателя. Каждая фаза обмотки статора (термин «якоря», употреблен автором вероятно ошибочно, т.к. якорь может быть только у коллекторной машины или у тягового электромагнита) подключена через датчик тока к фазному (отдельному) дифференциальному усилителю мощности, на инвертирующий вход которого подается сигнал с выхода соответствующего датчика тока, а на неинвертирующий вход подается сигнал с соответствующего фазного фазочувствительного выпрямителя (ФЧВ). Вход каждого фазного ФЧВ связан с одним из трех выходов обмотки синхронизации сельсина. Поток возбуждения сельсина создается токами несущей частоты в двух обмотках возбуждения - основной и квадратурной. Управление моментом электродвигателя осуществляется задатчиком момента путем изменения токов в обмотках возбуждения сельсина по определенным законам, которые формируется двумя функциональными преобразователями. По сравнению с предыдущим аналогом прототип обладает гладкой моментной характеристикой, подобной характеристике коллекторного электродвигателя. Использование сельсина в качестве ДПР позволило реализовать в электродвигателе-прототипе гармонический закон изменения тока в обмотках статора электродвигателя и обеспечить минимальные пульсации вращающегося магнитного поля статора, что и является причиной минимальных пульсаций вращающего момента, т.е. указанной выше гладкости моментной характеристики. В конструкции аналога-прототипа предусмотрено управление моментом электродвигателя и, поскольку этот момент задается задатчиком момента, постольку его величина всегда определена, однако в том случае, если двигатель используется, как это заявлено в описании, в прецизионной следящей системе, угловая скорость выходного вала электродвигателя подлежит измерению при помощи отдельного тахометрического датчика того или иного типа. Это усложняет конструкцию следящей системы, увеличивает ее габариты и уменьшает надежность. Указанная особенность аналога-прототипа является его недостатком, т.к. угловая скорость выходного вала электродвигателя является необходимой и важнейшей контролируемой координатой любой следящей системы.
Изобретение имеет своей целью усовершенствование конструкции бесконтактного электродвигателя постоянного тока. При использовании изобретения достигается совокупность следующих шести полезных технических результатов:
1. Обеспечивается отсутствие пульсаций вращающего момента на выходном валу электродвигателя.
2. Обеспечивается получение аналогового электрического сигнала, пропорционального моменту на выходном валу электродвигателя.
3. Обеспечивается получение аналогового электрического сигнала, пропорционального угловой скорости выходного вала электродвигателя.
4. Обеспечивается стабилизация вращающего момента на выходном валу электродвигателя при изменениях напряжения питания электродвигателя
5. Обеспечивается защита всех элементов электродвигателя и питающего его электрического силового источника от перегрузок.
6. Обеспечивается минимальная мощность управления угловой скоростью электродвигателя
Сущность изобретения, обеспечивающая достижение заявленных технических результатов, заключается в следующем.
Бесконтактный электродвигатель постоянного тока, содержащий активный ротор с укрепленными на нем постоянными магнитами, статор с трехфазной обмоткой, аналогичной статору машины переменного тока, содержащий, в качестве датчика положения ротора, сельсин, ротор сельсина связан по углу поворота с валом ротора электродвигателя, трехфазная обмотка синхронизации сельсина выходом каждой своей фазы подключена к входам трех соответствующих фазных фазочувствительных выпрямителей, выходы которых подключены к неинвертирующим входам трех соответствующих фазных усилителей мощности, выходы этих усилителей через три соответствующих фазных датчика тока подключены к трем соответствующим фазам обмотки статора, сигнальные выходы фазных датчиков тока подключены к инвертирующим входам соответствующих фазных усилителей мощности, содержащий также два функциональных преобразователя, отличается от прототипа тем, что трехфазная обмотка синхронизации сельсина выходом каждой своей фазы подключена к входам трех соответствующих фазных фазочувствительных выпрямителей через фильтры низкой частоты, а в силовую цепь питания электродвигателя введен датчик общего тока, сигнальный выход которого подключен ко входу модулятора, выход модулятора подключен к инвертирующему входу дифференциального усилителя, к синхронизирующему входу модулятора и к неинвертирующему входу дифференциального усилителя подключена клемма внешнего управления, а выход дифференциального усилителя подключен к обмотке возбуждения сельсина, кроме того, сигнальные выходы фазных датчиков тока подключены к входам первого функционального преобразователя, реализующего функцию аналогового преобразования трех входных напряжений в их среднеквадратическое значение, выход первого функционального преобразователя соединен с первой сигнальной клеммой, выходы фазных фазочувствительных выпрямителей, кроме того, через три соответствующих масштабирующих элемента подключены к входам второго функционального преобразователя, реализующего функцию, аналогичную первому преобразователю, выход второго функционального преобразователя подключен к суммирующему входу сумматора, вычитающий вход которого подключен к выходу первого функционального преобразователя параллельно первой сигнальной клемме, выход сумматора соединен со второй сигнальной клеммой.
На Фиг.1 изображена функциональная схема электродвигателя постоянного тока.
Бесконтактный электродвигатель постоянного тока, содержит активный ротор (1) с укрепленными на нем постоянными магнитами, статор с трехфазной обмоткой (2), аналогичной статору машины переменного тока. В качестве датчика положения ротора электродвигателя использован сельсин, ротор (3) которого жестко связан по углу поворота с валом ротора (1) электродвигателя, причем взаимное угловое положение ротора (1) и ротора (3) выполнено с учетом обеспечения их соответственного идентичного расположения относительно трехфазной обмотки (2) статора и трехфазной обмотки синхронизации (4) сельсина. Трехфазная обмотка синхронизации (4) сельсина выходом каждой своей фазы подключена через фазные фильтры низкой частоты (5), (6), (7) к входам трех соответствующих фазных фазочувствительных выпрямителей (ФЧВ) (8), (9), (10). Выходы ФЧВ подключены к неинвертирующим входам трех соответствующих фазных дифференциальных усилителей мощности (11), (12), (13), выходы этих усилителей через три соответствующих фазных датчика тока (14), (15), (16) подключены к трем соответствующим фазам соединенных звездой обмоток (2) статора, сигнальные выходы фазных датчиков тока (14), (15), (16) подключены к инвертирующим входам соответствующих дифференциальных фазных усилителей мощности (11), (12), (13). Питание на электродвигатель подается от внешнего источника постоянного тока достаточной мощности (позиция не показана). Силовая цепь питания осуществлена общими шинами, соединенными с силовыми входами фазных дифференциальных фазных усилителей мощности (11), (12), (13), как это показано на Фиг.1. Питание активных электронных устройств, а именно ФЧВ (8), (9), (10) и других, осуществляется от этих же шин (связи не показаны). В силовую цепь питания электродвигателя введен датчик общего тока (17), сигнальный выход которого подключен к входу модулятора (18), выход модулятора подключен к инвертирующему входу дифференциального усилителя (19) синхронизирующий вход модулятора (18) и неинвертирующий вход усилителя (19), соединены с клеммой внешнего управления (позиция не показана), через которую подается сигнал внешнего управления на несущей частоте. Выход дифференциального усилителя (19) нагружен на обмотку (20) возбуждения сельсина. Параллельно инвертирующим входам усилителей мощности (11) (12) (13) сигнальные выходы фазных датчиков тока (14) (15) (16) подключены к входам первого функционального преобразователя (21), реализующего функцию аналогового преобразования трех напряжений от фазных датчиков тока (14) (15) (16) в их среднеквадратическое значение. Выход первого функционального преобразователя (21) соединен с первой сигнальной клеммой (позиция не показана), предназначенной для съема аналогового сигнала, пропорционального моменту на выходном валу электродвигателя. Выходы фазных ФЧВ (8), (9), (10) параллельно неинвертирующим входам фазных дифференциальных усилителей мощности (11), (12), (13) через три соответствующих масштабирующих элемента (22), (23), (24) подключены на входы второго функционального преобразователя (25), реализующего функцию аналогового преобразования трех напряжений на выходах фазных ФЧВ в их среднеквадратическое значение. Выход второго функционального преобразователя (25) соединен с суммирующим входом сумматора (26), вычитающий вход которого соединен параллельно первой сигнальной клемме с выходом первого функционального преобразователя (21). Выход сумматора (26) соединен со второй сигнальной клеммой (позиция не показана), предназначенной для съема аналогового сигнала, пропорционального угловой скорости выходного вала электродвигателя.
Бесконтактный электродвигатель постоянного тока работает следующим образом: на обмотку возбуждения (20) сельсина подается напряжение возбуждения Uy переменного тока на несущей частоте порядка f≈1 кГц. При повороте вместе с ротором (1) электродвигателя оси симметрии ротора (3) сельсина относительно оси симметрии фазы (например, для определенности - фазы А) обмотки синхронизации (4) на угол α в фазах А, В, С обмотки синхронизации (4) сельсина наводятся фазные напряжения, величина каждого из которых определяется суммой двух составляющих. Большая составляющая обусловлена индуктивной связью активной обмотки возбуждения (20) с обмоткой синхронизации (4) и по гармоническому закону зависит от угла α. Вторая составляющая обусловлена вращением ротора сельсина, при котором, за счет указанной индуктивной связи, в каждой фазе обмотки (4) дополнительно наводятся гармонические низкочастотные напряжения, пропорциональные угловой скорости Ω ротора (3) сельсина. Таким образом, на выходе обмотки синхронизации (4) сельсина будут иметь место соответствующие суммарные фазные напряжения



В приведенных выражениях K1 - коэффициент, учитывающий индуктивную связь обмотки возбуждения (20) с обмоткой синхронизации (4) сельсина.
Частота дополнительных составляющих напряжения, зависящих от угловой скорости ротора, составит не более 50-100 Гц, так как частота вращения ротора электродвигателя не более 3000-6000 об/мин. Эта частота существенно меньше несущей частоты напряжения Uy и подавляется фильтрами низкой частоты (5), (6), (7), на выходе которых получаются следующие фазные напряжения



Далее эти напряжения поступают на фазочувствительные выпрямители (8), (9), (10), которые выделяют из несущей частоты фазные управляющие напряжения:



где  - амплитуда напряжения Uy.
- амплитуда напряжения Uy.
Фазные управляющие напряжения поступают на неинвертирующие входы соответствующих дифференциальных фазных усилителей мощности (11), (12), (13) с коэффициентом усиления по напряжению К2. На выходах этих усилителей получаются фазные питающие напряжения:



Фазные питающие напряжения через соответствующие фазные датчики тока (14), (15), (16) подаются на три соответствующие фазы А, В, С обмотки статора (2), соединенные звездой. С сигнальных выходов фазных датчиков тока (14), (15), (16) напряжения 

 пропорциональные фазным токам, подаются на инвертирующие входы соответствующих дифференциальных фазных усилителей мощности (11), (12), (13). При этом в силовой питающей цепи каждой фазы обмотки статора образуется петля отрицательной обратной связи по фазному току.
пропорциональные фазным токам, подаются на инвертирующие входы соответствующих дифференциальных фазных усилителей мощности (11), (12), (13). При этом в силовой питающей цепи каждой фазы обмотки статора образуется петля отрицательной обратной связи по фазному току.
Базовые соотношения для рабочего процесса электродвигателя получаются следующим образом.
При вращении ротора (1) величина каждого питающего фазного напряжения 

 поступающего на фазы А, В, С обмотки (2) статора, уменьшается на величину противо-ЭДС фазы за счет индукции вращающегося активного ротора (1).
поступающего на фазы А, В, С обмотки (2) статора, уменьшается на величину противо-ЭДС фазы за счет индукции вращающегося активного ротора (1).
Противо-ЭДС фазной обмотки, представляющей из себя катушку, состоящую из ω витков, определяется законом Фарадея [3]
где Ф - магнитный поток, взаимодействующий с одним витком.
Если ротор (1) создает магнитный поток Фр, то составляющие этого потока, взаимодействующие с каждой фазой обмотки (2), выразятся как


Подставляя выражения этих составляющих потока в формулу закона Фарадея и учитывая, что Ω=dα/dt, получим для каждой фазы



С учетом противо-ЭДС, токи каждой фазы в этой обмотке в соответствии с законом Ома определяются выражениями



где ω число витков в каждой фазе обмотки (2), Z - полное сопротивление (импеданс) одной фазы обмотки (2).
Фазные токи обмотки (2) создают потокосцепления фаз статора



где L - индуктивность одной фазы обмотки (2).
Электромагнитный момент МЭМ на валу электродвигателя создается за счет взаимодействия магнитного потока Фр ротора (1) и нормальных к нему составляющих потокосцеплений фаз статора. При этом каждая фаза обеспечит на валу электродвигателя момент в соответствии с выражениями
MA=ФрψAcosα
MB=ФрψBcos(α+2π/3)
MC=ФрψCcos(α+4π/3)
Результирующий момент будет равен их сумме
МЭМ=MA+MB+MC или

Тригонометрические преобразования квадратной скобки дают 
что позволяет записать формулу для результирующего момента в виде

или в виде выражения механической характеристики
Полученные формулы являются соответственно моментной и механической характеристиками патентуемого электродвигателя и показывают, что они принципиально не отличаются от подобных характеристик коллекторных двигателей постоянного тока. В соответствии с моментной характеристикой электромагнитный момент не зависит от положения ротора (1) относительно фазных обмоток (2), т.е. от угла α и характеристика является гладкой, пульсации момента отсутствуют, что и доказывает достижение первого из заявленных технических результатов.
Покажем как достигается второй технический результат. Для этого используем полученные выше выражения для фазных токов и найдем их среднеквадратичное значение,

Установим соотношение между результирующим моментом и среднеквадратичным значением фазных токов, используя полученные выше выражения
Откуда следует
где 
На сигнальных выходах фазных датчиков тока (14), (15), (16) напряжения  ,
,  ,
,  пропорциональны соответствующим фазным токам IA, IB, IC, или
пропорциональны соответствующим фазным токам IA, IB, IC, или
где K4 - коэффициент пропорциональности.
Поэтому напряжение  выразится как.
выразится как.

Напряжение  схемным способом получается на выходе первого функционального преобразователя (21) и подается на первую сигнальную клемму. Таким образом, напряжение на первой сигнальной клемме пропорционально моменту, развиваемому электродвигателем, и может использоваться как контрольный сигнал или же в качестве сигнала обратной связи по моменту в системах автоматического управления, т.е. достижение второго технического результата обеспечивается.
схемным способом получается на выходе первого функционального преобразователя (21) и подается на первую сигнальную клемму. Таким образом, напряжение на первой сигнальной клемме пропорционально моменту, развиваемому электродвигателем, и может использоваться как контрольный сигнал или же в качестве сигнала обратной связи по моменту в системах автоматического управления, т.е. достижение второго технического результата обеспечивается.
Покажем, что электрическое напряжение U6, снимаемое со второй сигнальной клеммы, пропорционально угловой скорости выходного вала электродвигателя, т.е. каким образом достигается третий технический результат.
При масштабировании напряжений 

 масштабирующими элементами (22), (23), (24) на их выходах получаются напряжения:
масштабирующими элементами (22), (23), (24) на их выходах получаются напряжения:



где K5 - коэффициент масштабирования.
Второй функциональный преобразователь (25) преобразует эти напряжения в их среднеквадратичное значение

Сумматор (26) осуществляет вычитание напряжения  из напряжения
из напряжения  в результате чего получается
в результате чего получается

Из последнего выражения следует, что при выполнении условия 
на выходе сумматора (26) получается напряжение, пропорциональное угловой скорости Ω выходного вала электродвигателя
Таким образом, сущностью изобретения обеспечивается достижение третьего заявленного технического результата.
Достижение четвертого технического результата обеспечивается следующим образом. Датчик общего тока (17), контролирует действующую величину общего постоянного тока, потребляемого силовой частью электродвигателя, т.е. всеми тремя фазами обмотки статора (2). На сигнальном выходе датчика (17) получается напряжение U7 - пропорциональное величине общего тока, потребляемого силовой частью электродвигателя. Этим выходом датчик (17) подключен к входу модулятора (18), который модулирует напряжение U7 частотой f внешнего управляющего напряжения  и осуществляет фазовую синхронизацию модулированного выходного сигнала U8 с напряжением
и осуществляет фазовую синхронизацию модулированного выходного сигнала U8 с напряжением  . Таким образом, на выходе модулятора (18) получается переменное напряжение U8, амплитуда которого пропорциональна величине общего тока, при этом частота и фаза напряжения U8 совпадает с частотой и фазой внешнего управляющего напряжения
. Таким образом, на выходе модулятора (18) получается переменное напряжение U8, амплитуда которого пропорциональна величине общего тока, при этом частота и фаза напряжения U8 совпадает с частотой и фазой внешнего управляющего напряжения  . Дифференциальный усилитель (19), на неинвертирующий вход которого подается внешнее управляющее напряжение
. Дифференциальный усилитель (19), на неинвертирующий вход которого подается внешнее управляющее напряжение  , осуществляет вычитание из него модулированного сигнала датчика общего тока (17), т.е. напряжения U8. На выходе усилителя (19) формируется напряжение возбуждения
, осуществляет вычитание из него модулированного сигнала датчика общего тока (17), т.е. напряжения U8. На выходе усилителя (19) формируется напряжение возбуждения  , где K6 - коэффициент усиления усилителя (19).
, где K6 - коэффициент усиления усилителя (19).
Этим обеспечивается отрицательная обратная связь по току, замкнутая через контур управления электродвигателем. Указанная обратная связь осуществляет статическую стабилизацию напряжения возбуждения Uy по амплитуде (стабилизацию  От величины
От величины  пропорционально зависят фазные токи IA, IB, IC (см. выражения для указанных токов), что и обеспечивает уменьшение чувствительности этих токов к изменению напряжения питания электродвигателя, т.е. их стабилизацию. Через соответствующие магнитные потоки, как это было показано выше, момент на валу электродвигателя, пропорциональный сумме фазных токов, оказывается также стабилизированным, что и является четвертым техническим результатом изобретения.
пропорционально зависят фазные токи IA, IB, IC (см. выражения для указанных токов), что и обеспечивает уменьшение чувствительности этих токов к изменению напряжения питания электродвигателя, т.е. их стабилизацию. Через соответствующие магнитные потоки, как это было показано выше, момент на валу электродвигателя, пропорциональный сумме фазных токов, оказывается также стабилизированным, что и является четвертым техническим результатом изобретения.
Достижение пятого технического результата, т.е. защита всех элементов электродвигателя и питающего его электрического силового источника от перегрузок обеспечивается отрицательными обратными связями по фазным токам и обратной связью по общему току. Перегрузка электродвигателя моментом оказывается невозможной, т.к. каждый фазный ток стабилизируется, во первых, по контуру управления, как это было показано выше, и, во вторых, по каналу усиления управляющего сигнала каждой фазы посредством отрицательных обратных связей с фазных датчиков тока (14), (15), (16) на фазные дифференциальные усилители мощности (11), (12), (13).
Управление угловой скоростью вала электродвигателя осуществляется изменением амплитуды  управляющего напряжения
управляющего напряжения  которое подается на клемму внешнего управления. Как это следует из выражения для механической характеристики
которое подается на клемму внешнего управления. Как это следует из выражения для механической характеристики 
зависимость Ω от  и от
и от  аналогична зависимости угловой скорости вала коллекторного электродвигателя от напряжения питания цепи якоря, при том, что, в отличие от напряжения питания якоря, напряжения Uy и
аналогична зависимости угловой скорости вала коллекторного электродвигателя от напряжения питания цепи якоря, при том, что, в отличие от напряжения питания якоря, напряжения Uy и  не являются силовыми, что обеспечивает существенное преимущество патентуемого электродвигателя, т.к. экономичное управление силовым напряжением питания цепи якоря является наиболее сложной задачей при использовании коллекторных электродвигателей в регулируемых приводах. Таким образом достигается шестой заявленный технический результат.
не являются силовыми, что обеспечивает существенное преимущество патентуемого электродвигателя, т.к. экономичное управление силовым напряжением питания цепи якоря является наиболее сложной задачей при использовании коллекторных электродвигателей в регулируемых приводах. Таким образом достигается шестой заявленный технический результат.
Патентуемый бесконтактный электродвигатель постоянного тока отвечает критерию промышленной применимости, т.к. может быть изготовлен промышленным способом без применения специальных технологий и оборудования на базе современного предприятия, с электромеханическим профилем производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| Моментный вентильный электродвигатель | 1983 |
|
SU1170565A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1972 |
|
SU327552A1 |
| Вентильный электродвигатель | 1989 |
|
SU1809504A1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Вентильный электродвигатель | 1979 |
|
SU790079A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Многофункциональный измерительный преобразователь | 1991 |
|
SU1835520A1 |
Изобретение относится к области электромашиностроения и может использоваться в качестве электродвигателя в системах управления. Технический результат заключается в усовершенствование заявленного устройства. Для этого заявленное устройство содержит активный ротор с укрепленными на нем постоянными магнитами, статор с трехфазной обмоткой, аналогичной статору машины переменного тока, содержащий в качестве датчика положения ротора, сельсин, ротор сельсина связан по углу поворота с валом ротора электродвигателя, трехфазная обмотка синхронизации сельсина выходом каждой своей фазы подключена к входам трех соответствующих фазных фазочувствительных выпрямителей, выходы которых подключены к неинвертирующим входам трех соответствующих фазных усилителей мощностей, выходы этих усилителей через три соответствующие фазные датчики тока подключены к трем соответствующим фазам обмотки статора, сигнальные выходы фазных датчиков тока подключены к инвертирующим входам соответствующих фазных усилителей мощности, и два функциональных преобразователя, при этом в силовую цепь питания электродвигателя введен датчик общего тока, модулятор, сумматор, дифференциальные усилители мощности и масштабирующие элементы, а трехфазная обмотка синхронизации сельсина выходом каждой своей фазы подключена к входам трех соответствующих фазных фазочувствительных выпрямителей. 1 ил.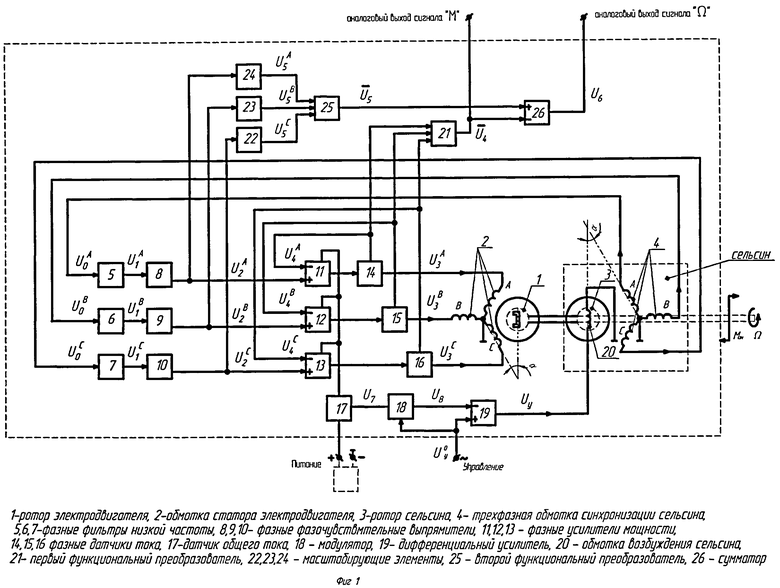
Бесконтактный электродвигатель постоянного тока, содержащий активный ротор с укрепленными на нем постоянными магнитами, статор с трехфазной обмоткой, аналогичной статору машины переменного тока, содержащий в качестве датчика положения ротора сельсин, ротор сельсина связан по углу поворота с валом ротора электродвигателя, трехфазная обмотка синхронизации сельсина выходом каждой своей фазы подключена к входам трех соответствующих фазных фазочувствительных выпрямителей, выходы которых подключены к неинвертирующим входам трех соответствующих фазных усилителей мощности, выходы этих усилителей через три соответствующих фазных датчика тока подключены к трем соответствующим фазам обмотки статора, сигнальные выходы фазных датчиков тока подключены к инвертирующим входам соответствующих фазных усилителей мощности, содержащий также два функциональных преобразователя, отличающийся тем, что трехфазная обмотка синхронизации сельсина выходом каждой своей фазы подключена к входам трех соответствующих фазных фазочувствительных выпрямителей через фильтры низкой частоты, а в силовую цепь питания электродвигателя введен датчик общего тока, сигнальный выход которого подключен ко входу модулятора, выход модулятора подключен к инвертирующему входу дифференциального усилителя, к синхронизирующему входу модулятора и к неинвертирующему входу дифференциального усилителя подключена клемма внешнего управления, а выход дифференциального усилителя подключен к обмотке возбуждения сельсина, кроме того, сигнальные выходы фазных датчиков тока подключены к входам первого функционального преобразователя, реализующего функцию аналогового преобразования трех входных напряжений в их среднеквадратическое значение, выход первого функционального преобразователя соединен с первой сигнальной клеммой, выходы фазных фазочувствительных выпрямителей, кроме того, через три соответствующих масштабирующих элемента подключены к входам второго функционального преобразователя, реализующего функцию, аналогичную первому преобразователю, выход второго функционального преобразователя подключен к суммирующему входу сумматора, вычитающий вход которого подключен к выходу первого функционального преобразователя параллельно первой сигнальной клемме, выход сумматора соединен со второй сигнальной клеммой.
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Сушилка | 1934 |
|
SU45213A1 |
| БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2001 |
|
RU2187195C2 |
| Устройство для управления двигателем постоянного тока | 1983 |
|
SU1104630A1 |
| Рентгеновский генератор | 1984 |
|
SU1221767A1 |

