сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1277308A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Способ управления вентильным двигателем и следящая система для его осуществления | 2017 |
|
RU2656354C1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1494156A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1742951A1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2400918C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРВИЧНЫМ МАГНИТНЫМ ПОТОКОМ | 2013 |
|
RU2606637C2 |
| Вентильный электропривод | 1989 |
|
SU1676053A1 |
Изобретение относится к электротехнике и может быть использовано в прецизионных следящих системах. В моментном вентильном электродвигателе использован второй модулятор 15, подключенный к квадратурной обмотке возбуждения датчика 16 положения ротора. Второй функциональный преобразователь 15 выполнен с возможностью реализации функции вида lq° рц (М0), что позволяет при оптимальных потерях в обмотке якоря синхронной машины упростить структуру вентильного электродвигателя. 2 ил.
//
b
W
VI
ю
Изобретение относится к электротехнике, в частности к моментным вентильным электротдвигателям с неограниченным углом поворота ротора, которые находят широкое применение в прецизионных следящих системах.
Цель изобретения - упрощение при сохранении минимальных потерь в обмотке якоря и высокой стабильности электромагнитного момента по углу поворота.
На фиг.1, 2 представлены функциональные схемы моментного вентильного электродвигателя с двухфазной и трехфазной электрической машиной соответственно.
Моментный вентильный электродвига- тель содержит синхронную электрическую машину 1 (фиг.1) с синусной 2 и косинусной 3 фазами обмотки якоря и с ротором-индуктором 4, усилители 5, 6 мощности, датчики 7, 8 тока, фазочувствительные выпрямители (ФЧВ) 9, 10, задатчик 11 момента, функциональные преобразователи(ФП) 12,13, модуляторы 14, 15, датчик 16 положения ротора, выполненный для двухфазной синхронной машины в виде синусно-косинусного вра- щающегося трансформатора (СКВТ) с основной и квадратурной обмотками 17 возбуждения и с двумя выходными обмотками 18.
Вы/од задатчика 11 момента по,:/лю- чен к входам ФП 12 и 13, выходы котсрых подключены к входам модуляторов , 15 соответственно. Их выходы подключены к основной и квадратурной обмоткам 17 возбуждения СКВТ 16, ротор которого механ /,- чески связан с ротором-индуктором 4 синхронной электрической машины 1, а синусная и косинусная выходные обмотки 18 СКВТ 16 подключены к входам ФЧВ 9, 10 соответственно. Их выходы подключены к первым входам усилителей 5, 6 мощности, выходы которых подключены к синусной 2 и косинусной 3 фазам обмотки якоря через входы датчиков 7, 8 тока, выходы которых подключены к вторым инвертирующим вхо- дам усилителей 5, 6 мощности соответственно. Функциональные преобразователи 12, 13 реализуют функции
id0 - pd(Mo),id° pd (Mo)
согласно равенствам
m +VyЈ + 4(Ld-Lq)z-ilp 2x
Mo
xp iq ; (Ld-Lq)-iql2
+
(D (2)
+4()2.,o2
где Mo - требуемый электромагнитный момент;
5
10
15 20 25 303540 45
50
55
id0, iq° -токи продольной и поперечной фаз обмотки якоря обобщенной электрической машины;
Ld, Lq - продольная и поперечная индуктивности фазы обмотки якоря;
р-число пар полюсов синхронной электрической машины;
Vm амплитуда потокосцепления фазы обмотки якоря с потоком ротора-индуктора.
Данный электродвигатель работает следующим образом.
На выходе задатчика 11 момента вырабатывается сигнал, пропорциональный требуемому электромагнитному моменту М0. Он поступает на ФП 12, 13, формирующие оптимальные значения токов iq° , id0 , которые подаются на входы модуляторов 14, 15. С их выходов сигналы Kriq° sin Qt, Krid° sin Qt поступают на продольную и квадратурную (поперечную) фазы обмотки 17 возбуждения СКВТ 16. На синусной и косинусной фазах его вторичной обмотки 18 формируются сигналы:
K2(-iq° sin a+id°cos a, sin Qt,
K2(+iq°cos a+id°s;n a).sin Qt, где Q-угловая частота модуляции.
Сигналы с вторичных обмоток 18 поступают на входы ФЧВ 9, 10. На их выходах получаются сигналы:
А° id0 . iq° .sin a;
iB° id° . iq° .cosa, равные оптимальным значениям токов синусной 2 и косинусной 3 фаз обмотки якоря синхронной электрической машины. Эти сигналы поступают на входы усилителя 5, 6 мощности, которые с помощью датчиков 7, 8 тока питают фазы 2, 3 обмотки якоря токами IA JA° , в в° . При этом синхронная электрическая машина 1 развивает стабильный момент Мо при минимальных потерях в обмотке якоря.
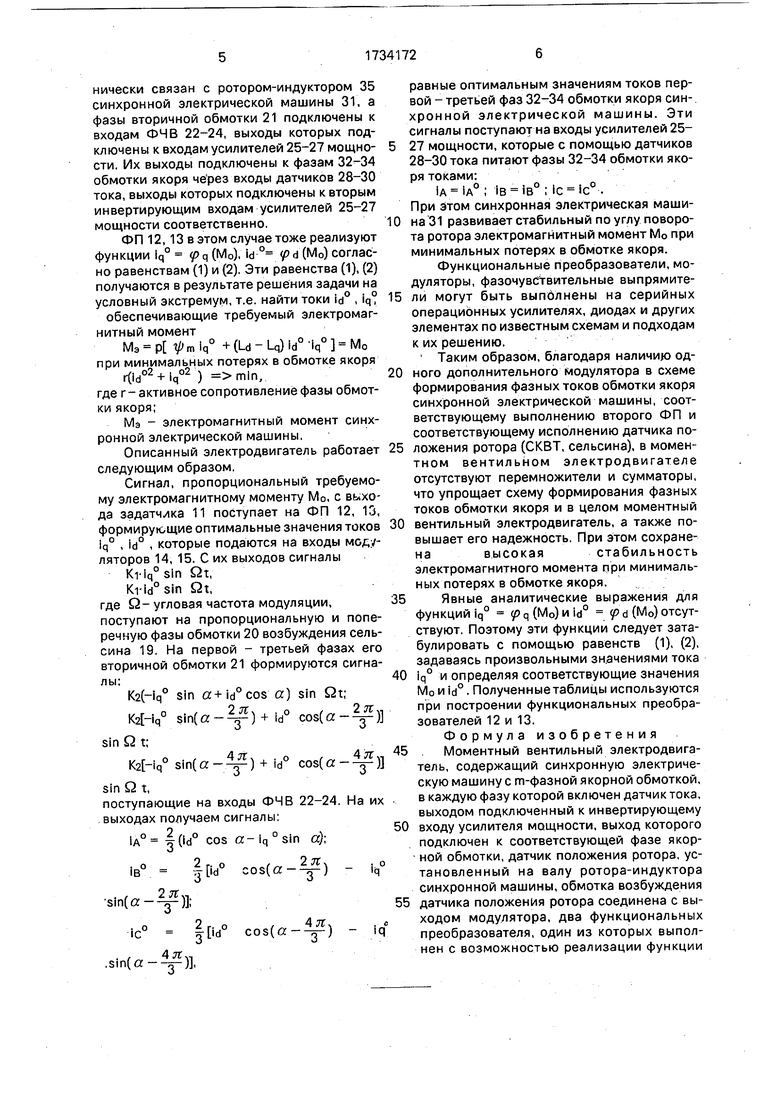
В моментном вентильном электродвигателе, выполненном на базе трехфазной синхронной машины (фиг.2), в качестве датчика положения ротора использован сельсин 19 с основной и квадратурной обмотками 20 и с трехфазной выходной обмоткой 21. Этот электродвигатель содержит ФЧВ 22-24, усилители 25-27 мощности, датчики 28-30 тока, синхронную электрическую машину 31 с фазами 32-34 обмотки якоря и с ротором-индуктором 35.
Выход задатчика 11 момента подключен к входам ФП 12, 13, выходы которых подключены к входам модуляторов 14, 15 соответственно. Их выходы подключены к основной и квадратурной обмоткам 20 возбуждения сельсина 19, ротор которого мехаsin(a-) + id°
cos(a-)
4Я,
sin Q t;
sin(a-) + id0 cos(a-)
sin Q t,
поступающие на входы ФЧВ 22-24. На их
выходах получаем сигналы:
нически связан с ротором-индуктором 35 синхронной электрической машины 31, а фазы вторичной обмотки 21 подключены к входам ФЧВ 22-24, выходы которых подключены к входам усилителей 25-27 мощности. Их выходы подключены к фазам 32-34 обмотки якоря че рез входы датчиков 28-30 тока, выходы которых подключены к вторым инвертирующим входам усилителей 25-27 мощности соответственно,
ФП 12,13 в этом случае тоже реализуют
ФУНКЦИИ iq° рц (М0), id ° fd (Mo) СОГЛЭСно равенствам (1) и (2). Эти равенства (1), (2) получаются в результате решения задачи на условный экстремум, т.е. найти токи id0 , iq обеспечивающие требуемый электромагнитный момент
Мэ р У т iq° + (Ld - Lq) id° 1q° Mo
при минимальных потерях в обмотке якоря
r(id°2 + iq°2 ) mln, где г - активное сопротивление фазы обмотки якоря;
Мэ - электромагнитный момент синхронной электрической машины.
Описанный электродвигатель работает следующим образом.
Сигнал, пропорциональный требуемому электромагнитному моменту М0, с выхода задатчика 11 поступает на ФП 12, 13, формирующие оптимальные значения токов iq° , id0 , которые подаются на входы мод/- ляторов 14, 15. С их выходов сигналы
Kriq°Sin Qt,
Krid°sin Qt,
где Q- угловая частота модуляции, поступают на пропорциональную и поперечную фазы обмотки 20 возбуждения сельсина 19. На первой - третьей фазах его вторичной обмотки 21 формируются сигналы:
K2(-iq° sin a+id°cos a) sin Qt;
4гг„
IA°
|о«°
cos ее- iq ° sin a);
iB°
cos(a-)
sin(a-);
idc
cos(a-)
10
15
20
25
30
35
40
45
50
55
равные оптимальным значениям токов первой - третьей фаз 32-34 обмотки якоря син- хронной электрической машины. Эти сигналы поступают на входы усилителей 25- 27 мощности, которые с помощью датчиков 28-30 тока питают фазы 32-34 обмотки якоря токами:
IA IA°; iB iB°;ic ic°. При этом синхронная электрическая машина 31 развивает стабильный по углу поворота ротора электромагнитный момент М0 при минимальных потерях в обмотке якоря.
Функциональные преобразователи, модуляторы, фазочувСтвительные выпрямители могут быть выполнены на серийных операционных усилителях, диодах и других элементах по известным схемам и подходам к их решению.
Таким образом, благодаря наличию одного дополнительного модулятора в схеме формирования фазных токов обмотки якоря синхронной электрической машины, соответствующему выполнению второго ФП и соответствующему исполнению датчика положения ротора (СКВТ, сельсина), в момен- тном вентильном электродвигателе отсутствуют перемножители и сумматоры, что упрощает схему формирования фазных токов обмотки якоря и в целом моментный вентильный электродвигатель, а также повышает его надежность. При этом сохраненавысокаястабильностьэлектромагнитного момента при минимальных потерях в обмотке якоря.
Явные аналитические выражения для функций iq° р q (Mo) и id0 p d (Mo) отсутствуют, Поэтому эти функции следует зата- булировать с помощью равенств (1), (2), задаваясь произвольными значениями тока iq° и определяя соответствующие значения Mo nid°. Полученные таблицы используются при построении функциональных преобразователей 12 и 13.
Формула изобретения
Моментный вентильный электродвигатель, содержащий синхронную электрическую машину с m-фазной якорной обмоткой, в каждую фазу которой включен датчик тока, выходом подключенный к инвертирующему входу усилителя мощности, выход которого подключен к соответствующей фазе якорной обмотки, датчик положения ротора, установленный на валу ротора-индуктора синхронной машины, обмотка возбуждения датчика положения ротора соединена с выходом модулятора, два функциональных преобразователя, один из которых выполнен с возможностью реализации функции
iq° pq (Mo), определяемой из соотношения
Mo--((Ld-Lq)2-iS2 ),
и выходом подключен к входу модулятора, а входы функциональных преобразователей подключены к выходу задатчика момента, каждая из выходных обмоток датчика положения ротора подключена к входу одного из фазочувствительных выпрямителей, отличающийся тем, что, с целью упрощения при сохранении минимальных потерь и высокой стабильности электрического момента по углу поворота, введен второй модулятор, датчик положения ротора снабжен квадратурной обмоткой возбуждения, подключенной к выходу второго модулятора, вход которого соединен с выходом второго функционального преобразователя, выполненного с возможностью реализации
Фиг. 2.
функции id0 (Mo), определяемой из соотношения:
2(Ld-Lq)
0
5
0
q
%
о2
q
V m+4(Ld -Lq)где MO - требуемый электромагнитный момент;
iq° - ток поперечной фазы обмотки якоря обобщенной электрической машины;
, Lq - индуктивности фазы обмотки якоря по продольной и поперечной осям;
V m - амплитуда потокосцепления фазы обмотки якоря с потоком ротора-индуктора;
р - число пар полюсов синхронной электрической машины;
id0 - ток продольной фазы обмотки якоря обобщенной электрической машины; а выход каждого фазочувствительного выпрямителя подключен к первому входу соответствующего усилителя мощности.
Јсп
| 0 |
|
SU186019A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1275680A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1277308A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
