Данное изобретение представляет турбомашину с лопастными роторами согласно определяющей части пункта 1 формулы изобретения.
Машины такого типа известны, в частности, из патентной заявки на изобретение №1345097, поданной 15 сентября 2003 года.
В этом документе описан механизм, в котором жидкость направляется перпендикулярно оси ротора лопастями, которые постоянно регулируются специальным механизмом управления. Таким образом, кинетическая энергия жидкости, например воды, может перехватываться и улавливаться лопастями по всей их поверхности в перпендикулярном положении относительно потока жидкости, причем лопасти не зафиксированы, и такие лопасти в процессе вращения вокруг оси ротора представляют минимальное препятствие для потока жидкости, когда они не создают какой-либо момент силы или только отрицательный момент. Следовательно, в соответствии с плотностью и физико-химическими свойствами жидкости, а также необходимой энергией подбирается соответствующий размер лопастей и ротора.
Относительно этого же механизма тот же заявитель обнаружил, что различные аспекты механизма такого типа могут быть усовершенствованы с целью получения лучших результатов.
Таким образом, целью данного исследования является создание турбомашины, в которой кинетическую энергию жидкости можно будет оптимально использовать с максимальной эффективностью.
Эта цель достигается путем создания турбомашины по данному изобретению с характеристиками согласно пунктам формулы изобретения.
Согласно данному изобретению предусмотрена турбомашина, сопоставимая со средненапорной гидротурбиной типа «поперечного тока», с осью, перпендикулярной направлению тока жидкости, работающей при помощи двух (и более) коаксильных или концентрических роторов.
Эта машина построена таким образом, чтоб перехватить и поглотить максимальное количество кинетической энергии потока жидкости (воды, воздуха), которая в нее запускается. Каждый ротор состоит из вращающегося круглого корпуса и имеет определенное количество лопастей (две и более), располагающихся обычно на равном расстоянии на виртуальной окружности, диаметр которой принят за изначальный диаметр ротора. Лопасти каждого ротора идентичны и симметричны, и каждая из них может вращаться вокруг своей оси вращения параллельно центральной оси машины с поворотом на 360° в обоих направлениях.
Вращение лопастей вокруг их собственной оси регулируется рядом механизмов (самыми различными механизмами, известными в этой сфере), которые обеспечивают правильное расположение каждой лопасти относительно друг друга под углом к поддерживающему их ротору и к направлению потока жидкости.
Механическое соединение этих движений можно легко подобрать в соответствии с конструкторскими требованиями при условии, что соблюдается соотношение ходов между роторами и лопастями. Это достигается путем направления лопастей, предназначенных для лучшего захвата кинетической энергии жидкости, и в соответствии с позицией, занимаемой момент за моментом во время вращения ротора. Такое движение является гармоничным без колебаний или пульсаций, поскольку оно всегда происходит в одном направление и с одной скоростью, которые пропорциональны вращению ротора, даже когда не осуществляется регулировка при помощи механизма управления или вручную. Вращение лопасти устроено так, чтобы выполнять поворот на 180° вокруг своей оси и против часовой стрелки относительно текущего направления вращения ее ротора, который в то же время выполнят полное вращение на 360° вокруг своей центральной оси. Это также применимо ко всем лопастям, задействованным по основной окружности того же ротора, и так далее для каждого оборота.
Желательно, чтобы два ротора по отношению друг к другу имели противоположное вращение, и то же самое применимо относительно движения соответствующих лопастей. Это способствует компенсации возникающего закручивания, из-за которого конструкция машины может начать вращаться относительно опорного основания, а также компенсирует другие механические трения, которые могут повлиять на чувствительность к управлению. С такими последствиями можно столкнуться в случае наличия только одного ротора.
Скорость вращения ротора с большим диаметром обычно меньше такой скорости ротора с меньшим диаметром, чтоб поддерживать приблизительно одинаковую периферийную скорость, пропорциональную скорости жидкости во время подачи или прохождения. Скорость вращения каждого отдельного ротора может быть (механически) свободной и регулироваться только ударным воздействием жидкости на лопасти или ограничиваться и координироваться четким соотношением между двумя роторами. Согласно требованиям можно произвести механический выбор свободного сопряжения с двумя выходными силами, с дифференцированным или пропорциональным ограничением.
Обратное вращение двух роторов достигается при помощи направления напора жидкости на лопасти, которые благодаря своему расположению и наклону (устанавливается при сборке машины) захватывают кинетическую энергию, трансформируя ее в момент вращения и частично изменяя направление потока, который их ударяет. Они направляют - с корректирующим синергическим эффектом - жидкость к следующим за ними лопастям одного ротора и далее до тех пор, пока жидкость не пройдет по всей системе. Тем не менее при сборке можно создать необходимые условия, чтобы лопасти вращались в одном направлении.
Форма лопасти, при условии что она симметрична относительно своей оси, не должна обязательно иметь классический аэродинамический профиль, но передний и задний края должны быть идентичны, чтобы они могли изменять свою роль при каждом обороте соответствующего ротора.
Это также говорит о наличии огромного количества вариантов для схемы 0 с изображением размеров лопастей, а именно: короткие и широкие лопасти, длинные и узкие лопасти, а также все промежуточные варианты, при условии что лопасти одного ротора идентичны и имеют симметричную форму. Габариты машины и роторов, а также размер, форма и количество лопастей должны соответствовать предполагаемой энергии и физическим характеристикам жидкости, а также условиям, в которых выполняется работа. Материалы для машины подбираются согласно плановой конструкции.
Обычно конструкция машины имеет вертикальную ось, однако она также может быть размещена под углом при условии, что ось идет перпендикулярно потоку жидкости. Машина может быть оборудована направляющим механизмом или другим приспособлением, которое определяет направление жидкости и действует на входной контроль машины, сконструированный таким образом, чтобы регулировать лопасти обоих роторов одновременно. Такой механизм может быть объединен с ручным управлением при помощи входного дифференциального механизма. Преимущество этой машины перед другими заключается в том, что таким способом можно без труда ориентировать только лопасти, даже когда машина работает на полной мощности и в условиях полной ориентации без необходимости ориентировать всю конструкцию. Это также дает возможность снизить скорость, остановить вращение и начать вращение роторов против часовой стрелки с одинаковой эффективностью, также при полном напоре жидкости и без необходимости прерывать работу машины.
Это реверсивная система и, соответственно, может функционировать также как импеллер. Если вместо того, чтобы отбирать мощность с выходного вала, к нему подсоединить двигатель или подобный механизм, конструкция машины используется противоположным образом, чтобы создать напор жидкости, в которую он погружен. Изменяя число оборотов, можно регулировать давление, а изменяя положение лопастей также можно направлять поток в любом направлении на 360°. С несомненным преимуществом в маневренности, особенно в области мореходства, с центральным напором от оси, который подается постоянно и без вибраций благодаря подвижным лопастям. Более того, поскольку ротор вращается достаточно медленно, риск кавитации ничтожен. Габариты и пропорции всегда выдерживают одну концепцию функционирования и тщательно подбираются в соответствии с целевым использованием импеллера (в данном случае).
Дальнейшие характеристики и варианты воплощения будут описаны в пунктах формулы изобретения и некоторых нижеприведенных описаниях предпочтительных воплощений, изображенных на приложенных рисунках, а именно:
Фиг.1 является схематическим изображением осевой части турбомашины согласно данному изобретению в первом варианте воплощения, где роторы имеют ограниченное механическое движение.
Фиг.2 является увеличенным частичным осевым разрезом Фиг.1.
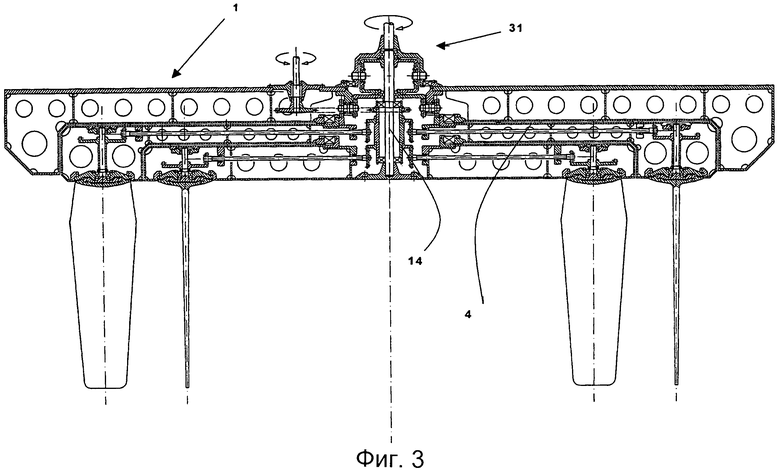
Фиг.3 является схематическим изображением осевой части турбомашины согласно данному изобретению во втором варианте воплощения, где роторы имеют связанные выходные движения и дифференциальный механизм.
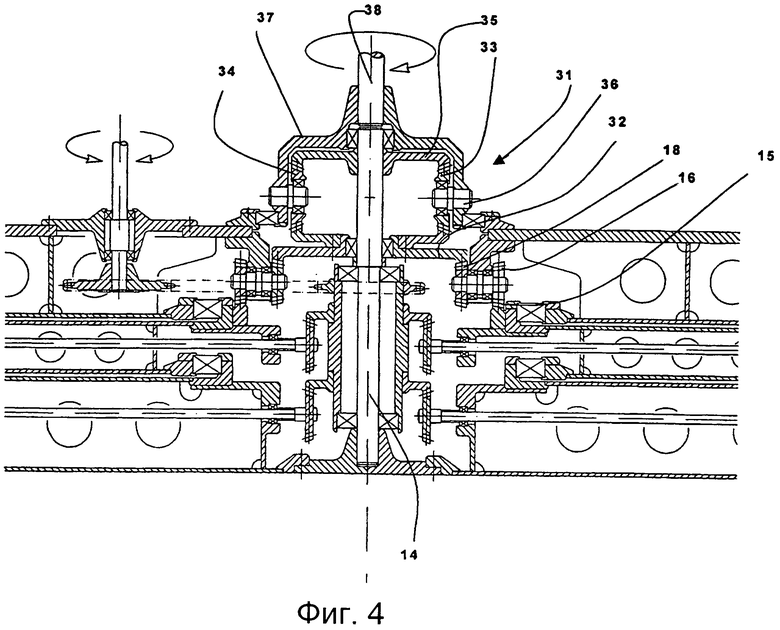
Фиг.4 является увеличенным частичным осевым разрезом Фиг.3.
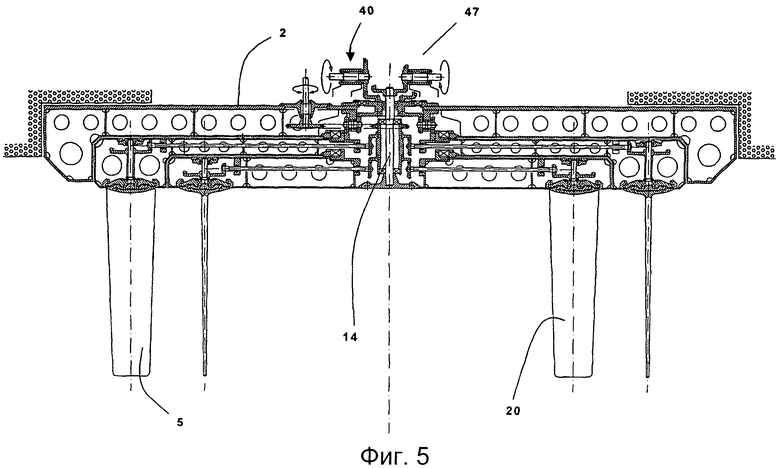
Фиг.5 является схематическим осевым сечением турбомашины по данному изобретению в третьем варианте воплощения, где роторы имеют независимый силовой вывод.
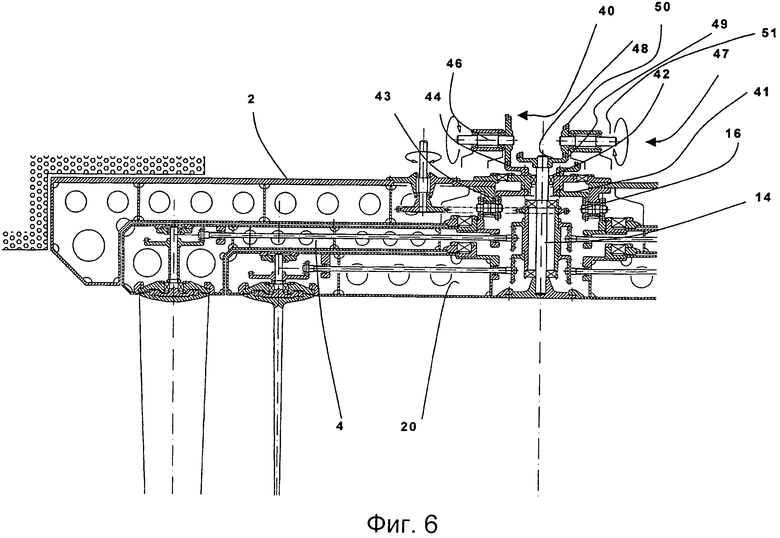
Фиг.6 является увеличенным частичным осевым разрезом Фиг.5.
На этих рисунках поз.1 обозначает всю турбомашину согласно данному изобретению. Она имеет основной корпус 2, в котором размещен первый ротор 4 при помощи подшипника 3. Вдоль окружности ротора 4 расположены по меньшей мере две лопасти 5 с возможностью вращения, которые равномерно распределены при помощи валов 6, ось которых перпендикулярна ротору 4. Каждый поворотный вал 6 жестко соединен с соответствующей лопастью 5 и снабжен конической шестерней 7, которая входит в зацепление с конической шестерней 8, которая закреплена на стержне 9, ось которого перпендикулярна оси вала 6 и который с возможностью вращения поддерживается ротором 4. На стержень 9 с другого конца насажена коническая шестерня 10, которая входит в зацепление с конической шестерней 11, жестко соединенной с муфтой 12, которая, в свою очередь, установлена с помощью подшипников 13 на валу 14, который с возможностью вращения размещен в корпусе 1. Ротор 4 вокруг своего центрального отверстия также содержит коронную коническую шестерню 15, которая входит в зацепление с вспомогательной шестерней 16, закрепленной на валу 17, размещенном с возможностью вращения в корпусе 1 и ось которого перпендикулярна оси коронной шестерни 15. Вал 17 также несет вторую вспомогательную шестерню 18, которая входит в зацепление с передним коническим зубчатым зацеплением диска 19, посаженного на вал 14.
Согласно данному изобретению первый ротор 4 связан со вторым ротором 20, который с возможностью вращения поддерживается подшипником 21 первого ротора 4, и содержит по меньшей мере две лопасти 22, которые равномерно распределены вдоль окружности, причем лопасти соответственно закреплены на валу 23, крепящемся к ротору 20 с возможностью вращения и ось которого перпендикулярна этому ротору. Как и для первого ротора 4, в этом случае вал 23 также несет коническую шестерню 24, с которой они соединены, и которая входит в зацепление с конической шестерней 25, посаженной на стержень 26, который в свою очередь поддерживается с возможностью вращения ротором 20 и ось которого перпендикулярна валу 23, и который на другом конце имеет коническую шестерню 27, входящую в зацепление с конической шестерней 28, которая смонтирована на муфте 12. Ротор 20 также жестко соединен с валом 14 при помощи фланца 59.
На муфте 12 также жестко закреплена звездочка 57, соединенная цепью 58 с зубчаткой 29, помещенной на вал 30, который с возможностью вращения размещен в корпусе 1. Таким образом, положение муфты 12 может изменяться в зависимости от вращения вала 30 и, следовательно, изменяется угловое положение лопасти 5 при любом положении ротора 4 относительно потока жидкости.
На Фиг.3 и 4 показан второй вариант воплощения, в котором два хода первого и второго ротора компенсируются дифференциалом, обозначенным поз.31.
Дифференциал 31 состоит из двойной коронной шестерни 32, которая с возможностью вращения посажена на вал 14 и с одной стороны входит в зацепление с первым ротором 4 через вспомогательную шестерню 16, а с другой стороны входит в зацепление с сателлитами 33 и 34, контактирующими в свою очередь с коронной шестерней 35, посаженной на вал 14, к которому жестко присоединен второй ротор 20. Сателлиты 33 и 34 вращаются на штифтах 36 стенки корзины 37, вращающейся вокруг вала 14 и жестко закрепленной на выходном валу 38. Понятно, что выходной вал 38 служит валом отбора мощности для потребителя.
Таким образом, при помощи сателлитов 33 и 34 движение второго ротора 20 оптимально компенсируется движением первого ротора 4.
Ниже приведены дополнительные характеристики.
Таким образом, мы получаем основной корпус 2, который формирует конструкцию всей машины и поддерживает роторы во время работы. Его можно использовать как для фиксированной, так и для мобильной конструкции, в зависимости от условий работы.
Первый ротор 4, являющийся более крупным или внешним, включает лопастные валы и их соответствующие приводные механизмы.
Второй ротор 20, являющийся меньшим или внутренним, включает лопастные валы и их соответствующие приводные механизмы.
Подшипник 3 является упорным подшипником для соединения основы с более крупным или внешним ротором, если роторы находятся в вертикальном положении.
Подшипник 21 является упорным подшипником для соединения более крупного ротора с меньшим или внутренним ротором, если роторы находятся в вертикальном положении.
Регулировочный входной вал 30 обычно неподвижен и непосредственно контролируется механизмом управления или похожим устройством или вручную.
Регулировочный входной вал 30 и регулирующая муфта могут быть соединены, если не цепью 58, то зубчатым ремнем, шестернями или другим способом, при условии, что передача постоянна и не проскальзывает.
Центральная регулировочная муфта 12 обычно неподвижна и может вращаться только в случае вращения регулировочного вала 30. Она удерживает две неподвижные короны 11 и 28 промежуточных шестерен, приводящих в движение лопасти как внешнего, так и внутреннего ротора. Ее движение контролирует одновременное движение всех первых промежуточных шестерен как большего, так и меньшего ротора.
Звездочка, контролируемая регулировочным валом, вращается совместно с муфтой. Вторая промежуточная шестерня 8 (на каждой лопасти) более крупного ротора имеет ровно половину зубьев по сравнению с числом зубьев соответствующей первой промежуточной лопастной шестерни. Вторая промежуточная лопастная шестерня 25 (на каждой лопасти) меньшего ротора имеет ровно половину зубьев по сравнению с числом зубьев соответствующей первой промежуточной лопастной шестерни. Лопастная корона соединена с валом, поддерживающим лопасть более крупного ротора. Она приводится в действие соответствующей второй промежуточной лопастной шестерней и таким образом приводится в сцепление. Она имеет такое же число зубьев, как верхняя опорная корона соответствующих первых промежуточных лопастных шестерен. Лопастная корона 24, соединенная с валом, поддерживающим лопасть меньшего ротора, приводится в действие соответствующей второй промежуточной лопастной шестерней и таким образом является ведомой. Она имеет такое же число зубьев, как нижняя опорная корона соответствующих первых промежуточных лопастных шестерен.
Вал, поддерживающий лопасть большего ротора, может иметь систему крепления для лопасти, которая может быть представлена любой такой системой, известной в этой сфере.
Вал, поддерживающий лопасть меньшего ротора, может иметь систему крепления для лопасти, которая может быть представлена любой такой системой, известной в этой сфере.
Тип лопасти более крупного ротора показан слева в плоскостном изображении (поз.5) и справа в поперечном сечении.
Тип лопасти меньшего ротора показан слева в поперечном сечении и справа в плоскостном изображении (поз.22).
Центральный соединительный фланец 59 (Фиг.1) между меньшим ротором и первой частью центрального выходного силового вала передает весь крутящий момент, создаваемый меньшим ротором.
Первая часть центрального силового вала 14 на практике передает примерно половину энергии, производимой машиной.
Два сателлита 16 и 18 через него жестко соединены во время вращения.
Центральная коронная шестерня 19 жестко и пропорционально передает вращение от большего и меньшего роторов прямо на вторую часть силового вала, добавляя вращательный момент большего ротора к моменту меньшего ротора. Передаточное отношение между центральной короной и короной, соединенной с более крупным ротором, пропорционально шагам между малым и большим роторами. В условиях конструкции, показанной на рисунке, достигается инверсия хода от большего ротора и, таким образом, его направление согласовано с таким направлением меньшего ротора.
Воплощение с выходным дифференциальным механизмом
Двойная коронная шестерня имеет такую часть как 19, но она не соединена с силовым валом, а соединена с другой короной, передающей последней вращающий момент большего ротора и направление меньшего.
Сателлиты, зацепленные и ведомые первой и второй короной в согласованном направлении, подвижно зацепляют по очереди корпус дифференциального механизма, который является корзиной дифференциала.
Воплощение со свободным движением
Двойная корона может быть напрямую присоединена при помощи муфты, имеющей общую ось с осью силы для внешнего пользователя. Аналогичным способом центральный силовой вал можно напрямую соединить с другим потребителем.
В третьем варианте воплощения, представленном на Фиг.5 и 6, первый кинематический механизм 40 формируется двойным водилом 41, которое поддерживается подшипником 42 на валу 14 и которое с одной стороны имеет переднюю зубчатку 43, входящую в зацепление с вспомогательной шестерней 16, а с другой стороны - переднюю зубчатку 44, входящую в зацепление с шестерней 45, помещенной на вал 46, вращающийся в основном корпусе 2 и применяемый как первый вал отбора мощности. Далее, второй кинематический механизм 47, образуемый водилом 48, насаженным на вал 14 и зацепляющимся своими передними зубьями 49 с шестерней 50, помещенной на вал 51, вращающийся в основном корпусе 2 и используемый как второй вал отбора мощности. В этом случае для каждого ротора 4 и 20 предусмотрен отдельный выход для разных потребителей.

Изобретение относится к турбомашинам. Турбомашина с лопастными роторами содержит основной корпус 2, ротор 4, подвижно размещенный в корпусе 1, по меньшей мере, две лопасти 5, имеющие возможность вращения, равномерно распределенные вдоль окружности ротора 4 и закрепленные на оси, параллельной оси ротора, конические шестерни 7, 8, 9, 10 между каждой осью лопасти 4 и муфтой 12, вращающейся на валу 14 ротора. Первый ротор 4 связан со вторым ротором 20, который подвижно включен в первый ротор 4. Второй ротор 20 содержит, по меньшей мере, две лопасти 22, имеющие возможность вращения, которые равномерно распределены вдоль окружности ротора 20 и закреплены на оси, параллельной оси ротора 20, передаточный механизм между каждой осью лопасти 22 и муфтой 12, вращающейся на валу 14 ротора. Изобретение направлено на создание турбомашины, в которой кинетическую энергию жидкости можно оптимально использовать с максимальной эффективностью. 12 з.п. ф-лы, 6 ил.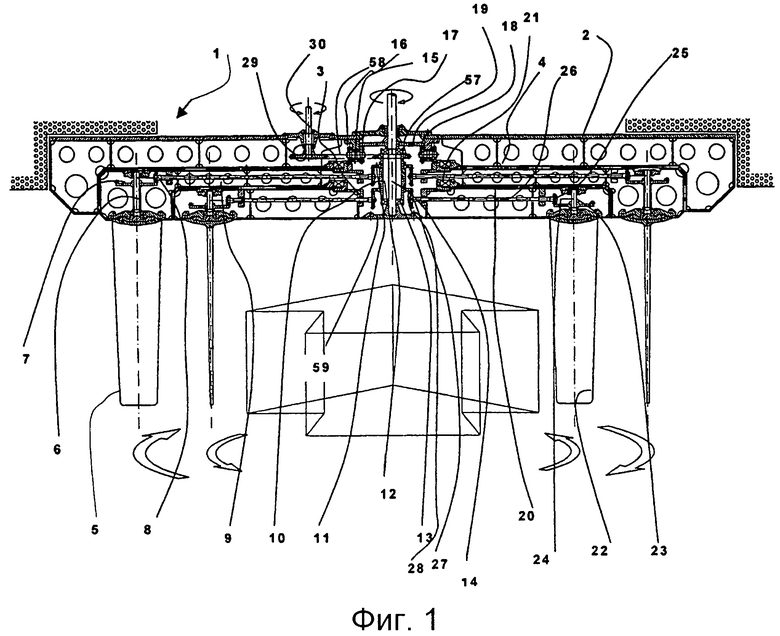
1. Турбомашина с лопастными роторами, содержащая основной корпус (2), ротор (4), подвижно размещенный в корпусе (1), по меньшей мере, две лопасти (5), имеющие возможность вращения, равномерно распределенные вдоль окружности ротора (4) и закрепленные на оси, параллельной оси ротора, конические шестерни (7, 8, 9, 10) между каждой осью лопасти (4) и муфтой (12), вращающейся на валу (14) ротора, и характеризующаяся тем, что первый ротор (4) связан со вторым ротором (20), который подвижно включен в первый ротор (4), причем второй ротор (20) содержит, по меньшей мере, две лопасти (22), имеющие возможность вращения, которые равномерно распределены вдоль окружности ротора (20) и закреплены на оси, параллельной оси ротора, передаточный механизм между каждой осью лопасти (22) и муфтой (12), вращающейся на валу (14) ротора.
2. Машина по п.1, отличающаяся тем, что передаточный механизм состоит из конической шестерни (24), посаженной на ось каждой лопасти, конической шестерни (25), входящей в зацепление с последней, стержня, несущего последнюю и поддерживаемого с возможностью вращения ротором (20), конической шестерни (27), которая жестко закреплена на стержне, и конической шестерни (28), закрепленной на муфте (12).
3. Машина по п.1, отличающаяся тем, что вращение муфты (12) вокруг своей оси регулируется.
4. Машина по п.1, отличающаяся тем, что муфта (12) кинематически соединена с зубчаткой (29), которая размещена в корпусе с возможностью вращения и регулировки при помощи штурвала, вручную или посредством другого устройства.
5. Машина по п.1, отличающаяся тем, что первый ротор (4) содержит коронную шестерню (15), зацепляющуюся с первой вспомогательной шестерней (16), которая с возможностью вращения удерживается корпусом (1) на оси, перпендикулярной оси вала (14), и со второй вспомогательной шестерней (18), которая в свою очередь зацепляется с коронной шестерней (19), напрессованной на вал (14).
6. Машина по п.1, отличающаяся тем, что второй ротор (20) помещается на тот же вал, что и первый ротор (4).
7. Машина по п.1, отличающаяся тем, что первый (4) и второй (20) роторы кинематически соединены с выходным валом (38) через дифференциал (31).
8. Машина по п.7, отличающаяся тем, что дифференциал (31) состоит из двойной коронной шестерни (32), которая насажена с возможностью вращения на вал (14) и входит в зацепление, с одной стороны, с первым ротором (4), а с другой стороны - с сателлитами (33 и 34), зацепляющимися с коронной шестерней (35), посаженной на вал (14), к которому жестко присоединен второй ротор (20), причем сателлиты (33 и 34) удерживаются в подвижном положении корзиной (37), вращающейся вокруг вала и жестко посаженной на выходной вал (38).
9. Машина по п.1, отличающаяся тем, что соответствующие движения роторов используются раздельно.
10. Машина по пп.1, 6 и 7, отличающаяся тем, что она является реверсивной и, следовательно, может быть использована для создания напора жидкости, с которой она работает.
11. Машина по п.1, отличающаяся тем, что она также в целом может работать с оппозитным расположением корпусов роторов, сохранив при этом такую же конструкцию коаксиальных и концентрических лопастей.
12. Машина по п.1, отличающаяся тем, что она также в целом работает в кожухе с проходящим потоком.
13. Машина по п.1, отличающаяся тем, что первый кинематический механизм (40) формируется двойным водилом (41), которое поддерживается подшипником (42) на валу (14) и которое с одной стороны имеет переднюю зубчатку (43), входящую в зацепление с вспомогательной шестерней (16), а с другой стороны - переднюю зубчатку (44), входящую в зацепление с шестерней (45), помещенной на вал (46), вращающийся в основном корпусе (2) и применяемый как первый вал отбора мощности, второй кинематический механизм (47), образуемый водилом (48), насаженным на вал (14) и зацепляющимся своими передними зубьями (49) с шестерней (50), помещенной на вал (51), вращающийся в основном корпусе 2 и используемый как второй вал отбора мощности.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 5324164 A, 28.06.1994 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| DE 102006002137 A1, 19.07.2007 | |||
| ГИДРОТУРБИНА ДЛЯ РУСЛОВОЙ ГЭС | 1997 |
|
RU2131994C1 |
| ГИДРОТУРБИНА ДЛЯ РУСЛОВОЙ ГЭС | 1997 |
|
RU2131994C1 |
| Режущий аппарат к самоподавателю для молотилок | 1930 |
|
SU21578A1 |

