Область техники, к которой относится изобретение
Изобретение относится к инерциальному датчику угловой скорости с компенсацией отклонения.
Уровень техники
Известно, что изотропный вибрационный гироскоп содержит осесимметричный резонатор с двумя степенями свободы.
Положение колебаний определяют при помощи двух электростатических датчиков, каждый из которых образован группой электродов, неподвижно соединенных с корпусом.
Команды, обеспечивающие управление колебаниями, подают при помощи двух электростатических приводов, каждый из которых образован группой электродов, неподвижно соединенных с корпусом.
Управление колебаниями состоит в компенсации затухания, устранении частотной анизотропии и при необходимости в изменении ориентации и/или частоты колебаний.
В режиме свободного гироскопа положение колебаний относительно корпуса частично определяется сообщаемой прибору угловой скоростью. В этом режиме работы отклонение, т.е. кажущееся вращение, которое возникает вследствие несовершенства прибора, зависит от положения колебаний относительно корпуса.
В основании, образованном двумя электродами, колебания можно характеризовать полярными координатами.
Полярный угол θ определен через π, т.е. отклонение гироскопа является периодической функцией θ с периодом π.
В этом случае отклонение гироскопа можно представить в виде ряда Фурье, образованного членами cos (2nθ) и sin (2nθ), где n - целое число.
Основной причиной среднего отклонения (постоянный член ряда Фурье) является совмещение точек отсчета датчиков и точек отсчета приводов.
В первом приближении использование одних и тех же электродов в качестве приводов и датчиков позволяет устранить среднее отклонение.
Для обеспечения эффективности способа необходимо, чтобы математическое выражение коэффициентов усиления датчиков и коэффициентов усиления приводов было подобным, чтобы дефекты изготовления датчиков естественным образом компенсировались приводами.
В известных устройствах измерение сигнала от датчика осуществляют путем соединения каждого электрода датчика с цепью нагрузки, имеющей высокий импеданс, т.е. входной импеданс этой цепи намного выше выходного импеданса соответствующего электрода датчика. В этом случае выдаваемый электродом датчика ток близок к нулю, а напряжение на контактах цепи нагрузки теоретически линейно зависит от изменения воздушного зазора. Однако паразитные импедансы, возникающие из-за дефектов изготовления, ухудшают линейность ответного сигнала датчика. Чтобы свести этот эффект к минимуму, как правило, сигналы от датчика направляют по очень дорогим и очень массивным экранированным каналам. Кроме того, обусловленные примесями изменения электрического поля в воздушном зазоре вызывают электрические потери, что приводит к различному гашению колебаний в зависимости от их ориентации и, следовательно, к отклонению, которое само по себе является функцией ориентации колебаний относительно корпуса.
Раскрытие изобретения.
Задача изобретения заключается в сведении к минимуму части отклонения, не зависящей от положения колебаний относительно корпуса прибора.
Поставленная задача решена в инерциальном датчике угловой скорости, содержащем вибрирующий элемент с находящимися друг против друга покрытыми металлом частями, образующими конденсатор переменной емкости, связанный через мультиплексор/демультиплексор со схемой управления. Схема управления выполнена с возможностью работы как в режиме привода, так и в режиме обнаружения и имеет низкий импеданс в этих двух режимах.
Мультиплексорная система позволяет поочередно использовать электроды в качестве приводов (режим привода) и датчиков (режим обнаружения). Комбинация мультиплексора/демультиплексора со схемой управления с низким импедансом как в режиме привода, так и в режиме обнаружения обеспечивает компенсацию отклонения, которая автоматически устраняет член отклонения, не зависящий от положения колебаний относительно корпуса прибора.
Другие особенности и преимущества изобретения будут более понятны из дальнейшего описания варианта его осуществления со ссылками на чертежи.
Краткое описание чертежей
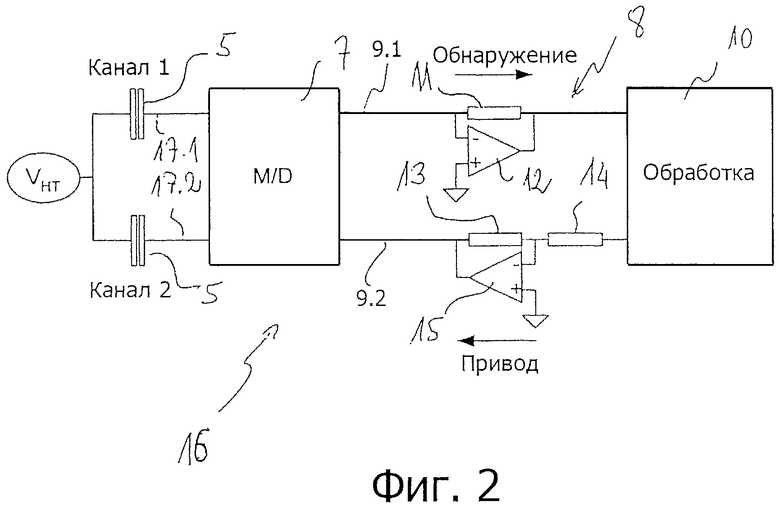
На фиг.1 схематично показан чувствительный элемент в виде полусферического вибрирующего резонатора в соответствии с настоящим изобретением, вид в разрезе;
на фиг.2 - схема системы обработки данных, связанной с указанным чувствительным элементом.
Показанный на фиг.1 вибрирующий чувствительный элемент содержит купол 1 из кремнийсодержащего материала, опирающийся на стержень 4, закрепленный на основании 3. Внутренняя поверхность купола 1, а также его кромка и стержень 4 покрыты слоем 2 металла. На основании 3 установлены электроды 5. Каждый электрод 5 образует вместе с находящейся напротив покрытой металлом кромкой купола 1 конденсатор 6 переменной емкости, который работает поочередно в режиме привода и в режиме обнаружения при помощи схемы обработки данных, обозначенной общей позицией 16. Схема 16 содержит мультиплексор/демультиплексор 7, связанный со схемой 8 управления, образуя цепь нагрузки. Схема 8 управления содержит первую и вторую ветви 9.1 и 9.2, соединяющие мультиплексор/демультиплексор 7 с блоком 10 обработки. Блок 10 обработки содержит другой вывод, соединенный с покрытой металлом кромкой купола 1. Блок 10 обработки выполнен с возможностью подачи напряжения смещения на один из выводов конденсатора, при этом другой вывод замкнут накоротко. Блок 10 обработки измеряет ток короткого замыкания электродов.
Первая ветвь 9.1 содержит резистор 11, последовательно соединенный с мультиплексором/демультиплексором 7 и с блоком 10 обработки. Параллельно резистору 11 подключен усилитель 12 так, что его инвертирующий вход соединен с мультиплексором/демультиплексором 7, прямой вход заземлен, а выход соединен с блоком 10 обработки.
Вторая ветвь 9.2 содержит резисторы 13 и 14, последовательно соединенные с мультиплексором/демультиплексором 7 и с блоком 10 обработки. Параллельно резистору 13 подключен усилитель 15 так, что его инвертирующий вход подсоединен между резисторами 13 и 14 для соединения с блоком 10 обработки через резистор 14, прямой вход заземлен, а выход соединен с мультиплексором/демультиплексором 7.
Электроды 5 разделены на две группы, каждая из которых соединена через каналы 17.1, 17.2 с мультиплексором/демультиплексором 7.
Согласно изобретению, схема 8 управления, т.е. каждая из ветвей 9.1, 9.2, является схемой с низким импедансом, т.е. имеет более низкий импеданс по сравнению с выходным импедансом конденсатора. В частности, схема удовлетворяет отношению
R/G<<1/(Cω0),
где R - сопротивление резистора 11, 13 (в зависимости от рассматриваемой ветви),
G - коэффициент усиления усилителя 12, 15 (в зависимости от рассматриваемой ветви),
С - емкость переменного конденсатора 6,
ω0 - круговая частота колебаний на резонансной частоте чувствительного. элемента.
Усилители 12 и 15 усиливают напряжение и, следовательно, имеют низкое сопротивление.
Таким образом, обнаружение осуществляют для двух каналов 17.1, 17.2, используя одну и ту же цепь, т.е. ветвь 9.1 схемы 8 управления, а приведение в действие (или «привод», как указано на фиг.2) реализуют для двух каналов 17.1 и 17.2, используя одну и ту же цепь, т.е. ветвь 9.2 схемы 8 управления.
Разумеется, изобретение не ограничивается представленным вариантом осуществления, специалист может предусматривать его версии, не выходя за рамки изобретения, определенные формулой изобретения.
В частности, несмотря на то, что изобретение описано в отношении инерциального датчика угловой скорости, содержащим вибрирующий купол, изобретение можно применять также для любого датчика угловой скорости, содержащего установленные напротив друг друга электроды для получения переменного конденсатора, поочередно выполняющего роль привода и датчика.
Несмотря на приведенные два примера, цепи нагрузки, изобретение можно применять также для любого устройства, использующего цепь нагрузки с низким импедансом, т.е. в котором входной импеданс намного ниже выходного импеданса переменного конденсатора.
Покрытая металлом кромка купола может быть непрерывной или прерывистой, образуя электроды, отделенные друг от друга по кромке (проводящий слой в виде паутины, начинающейся от полюса купола).
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2002 |
|
RU2235353C2 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО АТМОСФЕРНОЙ ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2020 |
|
RU2745525C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| Вводно-распределительное устройство ответственных электроприёмников | 2020 |
|
RU2750436C1 |
| Стабилизированный преобразователь переменного напряжения в постоянное | 1980 |
|
SU1005240A2 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2158903C1 |
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО ПИТАНИЯ ДЛЯ ПОСТАНОВКИ ЭЛЕКТРОВОЗОВ НА РЕМОНТНУЮ ПОЗИЦИИЮ | 2002 |
|
RU2229989C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ХИМИЧЕСКОГО РЕАГЕНТА В ПОТОК ВЫХЛОПНЫХ ГАЗОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2020 |
|
RU2796611C2 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |
| Устройство управления лифтом | 1983 |
|
SU1193094A1 |
Изобретение предназначено для измерения угловой скорости. Инерциальный датчик содержит вибрирующий элемент (1) с расположенными друг против друга покрытыми металлом частями (2, 5), образующими конденсатор (6) переменной емкости, мультиплексор/демультиплексор, соединенный с конденсатором, и цепь нагрузки с низким импедансом, соединенную с мультиплексором/демультиплексором. Изобретение обеспечивает компенсацию отклонения, не зависящего от положения колебаний относительно корпуса прибора. 1 з.п. ф-лы, 2 ил.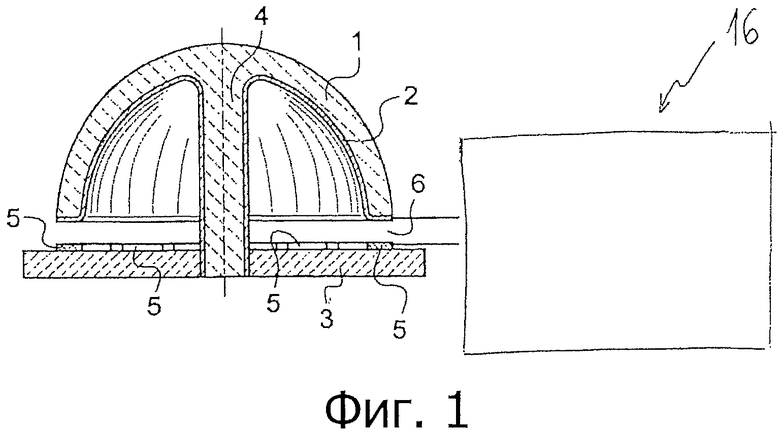
1. Инерциальный датчик угловой скорости, содержащий вибрирующий элемент (1) с расположенными друг против друга покрытыми металлом частями (2, 5), образующими конденсатор (6) переменной емкости, мультиплексор/демультиплексор (7), соединенный с указанным конденсатором (6) переменной емкости, и цепь нагрузки, соединенную с указанным мультиплексором/демультиплексором, при этом цепь нагрузки представляет собой цепь нагрузки с низким импедансом.
2. Инерциальный датчик по п.1, в котором цепь нагрузки имеет усилитель с коэффициентом усиления G и сопротивление резистора R, так чтобы R/G<<1/(Cω0), где С - емкость указанного конденсатора, а ω0 - круговая частота колебаний на резонансной частоте вибрирующего элемента (1) датчика.
| US 7093488 В2, 22.08.2006 | |||
| US 6467346 В1, 22.10.2002 | |||
| US 5817940 А, 06.10.1998 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АМПЛИТУДЫ КОЛЕБАНИЙ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА | 1992 |
|
RU2011168C1 |

