Изобретение относится к оптическому приборостроению, областям фотоники и вычислительной техники, преимущественно к инфракрасным (ИК) системам, осуществляющим пространственную выборку изображения с помощью матричного многоэлементного приемника излучения, используемого в разных отраслях науки, техники, народного хозяйства, в частности, для обнаружения посторонних объектов в заданной зоне пространства.
Известен способ выделения объектов, заключающийся в приеме излучения объектов и фона, формировании их изображения в плоскости приемника излучения и выделении объектов по соответствующей априорной дальности до объекта (см. патент US №3221591, кл. НПК 350-10, 1972).
К недостаткам данного способа следует отнести малую вероятность выделения объектов, расположенных на конечной дальности от прибора, при априорно неизвестном удаленном фоне.
Также известен способ выделения объекта из входного изображения с использованием эталонного изображения (патент Японии IP 08-323299, публ. 20 ноября, 1996 г., G06K 9/46). Данное изобретение относится к способам обработки изображений и предназначено для точного автоматического определения области, содержащей искомый объект во входном изображении, и ее выделения. Определение порога осуществляется по данным об интенсивности границ объектов, полученным за счет вычитания предыдущего кадра из последующего. Обозначение основной области происходит за счет анализа контурной линии, полученной при вычитании, а дальнейшее распознавание происходит при сравнении с эталоном, содержащимся в памяти. Порог устанавливается в виде количества пикселей, содержащихся в разностном изображении. Определение области выполняется за счет выделения определенной части исходного изображения при его комбинировании с основной областью.
Недостатком этого способа является необходимость использования эталонного изображения, что создает невозможность распознавания объектов, отсутствующих в базе данных (возможно только их обнаружение по базе данных), а также обеспечивается распознавание лишь единственного типа объекта в текущем кадре, при этом требуется осуществлять учет как хроматических, так и пространственно-геометрических признаков объекта. Применение многоступенчатых алгоритмов разделения изображения на сегменты, требуемое для достижения высокой вероятности распознавания, существенно увеличивает программную сложность реализации способа.
Изобретение по патенту Японии JP 2008-66775, публ. 14 марта 2008 г., G06K 9/00, «Устройство для обнаружения объекта, метод его контроля, программа, среда хранения информации и устройство, в котором они используются» характеризуется следующей последовательностью действий:
- получение входного изображения;
- выбор критериев, по которым будет осуществляться обнаружение объекта;
- обнаружение и распознавание объекта в кадре по установленному критерию;
- вывод изображения с интересующей информацией.
Данное изобретение призвано решить следующие недостатки известных решений распознавания объектов в кадре:
- чрезвычайно высокую нагрузку на вычислительные ресурсы устройства, приводящую к использованию дорогостоящей электроники и высокому энергопотреблению;
- необходимость разделения по времени между операциями обнаружения и распознавания для оптимизации вычислительных ресурсов, что увеличивает время получения итогового результата.
Основная цель данного изобретения - быстрый вывод на устройство отображения распознанного объекта в кадре при одновременной обработке следующего объекта - сочетание оперативного отображения результатов совместно с параллельной обработкой поступающих данных позволяет увеличить быстродействие системы без использования дополнительных вычислительных ресурсов.
Из недостатков метода следует выделить:
- использование нескольких критериев обнаружения приводит к получению набора результатов, из которых требуется выбрать лучший, что усложняет структуру алгоритма обработки и существенно увеличивает объем памяти, требуемой для хранения результатов;
- для увеличения эффективности распознавания требуется проводить обработку серии изображений, при этом условия могут изменяться от кадра к кадру, что также является неоптимальным с точки зрения времени получения результатов и объема используемой памяти;
- метод основан исключительно на программной коррекции результатов и не допускает использования аппаратных средств корректировки внешних условий при проведении измерений (т.е. нет управления оптикой, положением ФПУ и т.д.).
В качестве прототипа можно рассматривать изобретение «Способ выделения изображения объекта из фона» (патент US №4783833, публ. 08.11.1988 г., кл. G06K 9/00), в котором с помощью объектива ОЭС формируют первое неподвижное изображение фона, в качестве которого может быть и объект, регистрируют его с использованием матричного ФПУ и подвергают электронной обработке с целью выделения и усиления яркости его границ. Затем при появлении движущегося объекта формируют второе изображение, регистрируют аналогично первому и фиксируют изменение яркости пикселей изображения фона путем вычитания второго зарегистрированного изображения из первого. За счет пороговой обработки по заранее установленному критерию производят выделение пикселя, значение сигнала с которого превышает установленный порог, что создает контрастное изображение границ объекта, способствующее его уверенному выделению.
Для увеличения точности выделения перемещающегося объекта производят смещение приемного модуля в вертикальном и горизонтальном направлениях в течение времени кадра, что эквивалентно заданию определенного закона смещения фонового изображения, при этом объект движется по своему собственному закону. Покадровое сравнение в данном случае позволяет достичь наиболее точного совмещения изображений перемещающегося объекта во времени, обеспечивая уверенное выделение объекта в динамической обстановке.
Таким образом, распознавание движущегося объекта (выделение его контура) осуществляется за счет вычитания последующего и предыдущего кадров, в течение которых осуществляется смещение приемного модуля в двух плоскостях, перпендикулярных визирной оптической оси прибора, - используется смещение объектов его площади кадра. При этом в предлагаемом изобретении задачи решаются за счет смещения объекта по глубине (т.е. вдоль оптической оси прибора) при неизменном его расположении в кадре.
Основным недостатком данного способа является достаточно низкая вероятность распознавания объектов из-за влияния шумовой составляющей, обусловленной неоднородностью чувствительной поверхности матричного ФПУ.
Задачей, на решение которой направлено заявляемое изобретение, является подоптимальная фильтрация изображения, близкая к реализуемой в человеческом глазу.
Данная задача решается за счет того, что заявленный способ выделения объекта в изображении, заключающийся в последовательном формировании объективом двух изображений объектов и фона на поверхности матричного ФПУ в виде матрицы значений электрических сигналов, подвергаемых попиксельной регистрации и цифровой обработке с последующим формированием разностных изображений путем вычитания одного зарегистрированного изображения из другого, осуществлении пороговой обработки разностного изображения и определении пикселя, значение яркости которого превысило порог, при формировании первого сфокусированного изображения объектов и фона в объективе оптического тракта в сходящемся оптическом пучке устанавливают плоскопараллельную пластину, при формировании второго расфокусированного изображения и фона в сходящемся оптическом пучке устанавливают плоскопараллельную пластину толщиной, отличной от толщины первой, при этом разностное изображение образуют вычитанием второго изображения из первого.
Технический результат обеспечивается приведенной совокупностью признаков и выражается достижением максимального отношения полученного выходного сигнала к уровню помех от облаков и шумов, что связано с независимостью сигнала от уровня темновых элементов матрицы; выделение оптического сигнала происходит на одном и том же элементе матрицы, поэтому оно происходит точно, без влияния геометрических шумов.
Сущность заявляемого изобретения поясняется чертежом, на котором изображена принципиальная схема, реализующая алгоритм выделения изображения объектов на удаленном фоне.
Устройство, реализующее заявленный способ, содержит объектив 1, пару разнотолщинных несоосных плоскопараллельных оптически прозрачных пластин 2 и 3 с одинаковым коэффициентом пропускания, закрепленных на оси привода вращения 4, параллельной оптической оси, многоплощадочное фотоприемное устройство (МФПУ) 5, электронный тракт обработки изображения 6 и блок отображения 7. При этом тракт 6 включает преобразователь аналогового сигнала в цифровой (АЦП) 8, запоминающие устройства 9, 9', вычитающее устройство 10, блок сравнения с заранее выбранным порогом 11 и преобразователь цифрового сигнала в аналоговый (ЦАП) 12.
Принцип действия устройства, реализующего заявленный способ, заключается в том, что инфракрасное излучение от объекта и фона проецируется оптической системой 1 оптико-электронного прибора (ОЭП) через плоскопараллельную прозрачную пластину 2 на МФПУ 5. При этом экспонируют первое изображение, вводя на оптическую ось объектива 1 в сходящемся пучке прозрачную тонкую пластину 2, сформированное изображение считывают попиксельно с МФПУ 5 в виде матрицы значений электрического сигнала, подвергают оцифровке в АЦП 8 и запоминают в устройстве 9. Затем с помощью привода вращения 4 вводят на оптическую ось объектива 1 в сходящемся пучке прозрачную толстую плоскопараллельную пластину 3, таким образом формируя расфокусированное объективом 1 (не рассчитан на работу с толстой пластиной) изображение, аналогично получают электронный сигнал, считывая его попиксельно с МФПУ 5, оцифровывают в АЦП 8 и запоминают в устройстве 9. Для определения типа использованной пластины 2 или 3 для синхронизации с процессом опроса матрицы установлен маркерный датчик (на чертеже не показан); при смене вращающихся пластин сохраненное в устройстве 9' значение сравнивают со значением в устройстве 9 и полученное в блоке 10 разностное изображение подвергают пороговой обработке в блоке 11, при этом выделяют сигнал, фиксируя пиксели, яркость которых превышает выбранный порог. Используя хорошо освоенные и эффективные методы обработки цифровых изображений, осуществляют фильтрацию сигнала от помех и преобразуют его в блоке ЦАП 12 в аналоговую форму для представления на экране монитора 7 в виде сигнала, удобного для восприятия оператором.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ СЛАБОИЗЛУЧАЮЩИХ ПОДВИЖНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ НА ПРОСТРАНСТВЕННО-НЕОДНОРОДНОМ ФОНЕ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2013 |
|
RU2536082C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415053C1 |
| СПОСОБ СРАВНЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2673396C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2003 |
|
RU2250478C2 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| СПОСОБ КРУГОВОГО ОБЗОРА МАТРИЧНЫМ ФОТОПРИЕМНЫМ УСТРОЙСТВОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445644C2 |
| CПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2528140C1 |
| Способ компенсации геометрического шума инфракрасных изображений | 2018 |
|
RU2688616C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЦЕЛЕЙ НА ОСНОВЕ РЕГИСТРАЦИИ И ОБРАБОТКИ ХОДА ЛУЧЕЙ ОТ ОБЪЕКТОВ В НАБЛЮДАЕМОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2760845C1 |
Изобретение относится к оптическому приборостроению и может быть использовано для обнаружения посторонних объектов в заданной зоне пространства. Согласно способу с помощью объектива последовательно формируют два изображения объекта для последующей цифровой обработки, заключающейся в формировании разностного изображения и его пороговой обработки. При формировании первого сфокусированного изображения объектов и фона в объективе оптического тракта в сходящемся оптическом пучке устанавливают плоскопараллельную пластину. При формировании второго расфокусированного изображения и фона в сходящемся оптическом пучке устанавливают плоскопараллельную пластину толщиной, отличной от толщины первой. Разностное изображение формируют вычитанием второго изображения из первого. Технический результат - максимальное отношение сигнал/шум, исключение влияния геометрических шумов. 1 ил.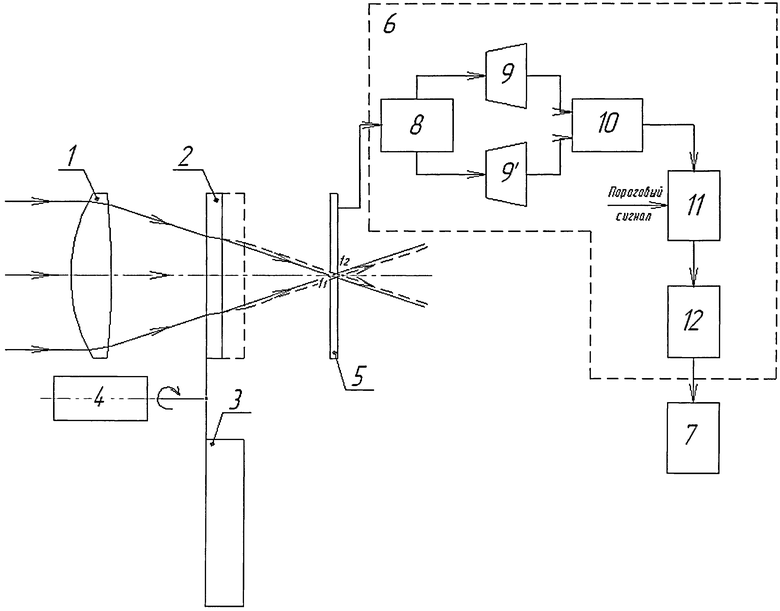
Способ выделения объекта в изображении, заключающийся в последовательном формировании объективом двух изображений объектов и фона на поверхности матричного ФПУ в виде матрицы значений электрических сигналов, подвергаемых попиксельной регистрации и цифровой обработке с последующим формированием разностных изображений путем вычитания одного зарегистрированного изображения из другого, осуществлении пороговой обработки разностного изображения и определении пикселя, значение яркости которого превысило порог, отличающийся тем, что при формировании первого сфокусированного изображения объектов и фона в объективе оптического тракта в сходящемся оптическом пучке устанавливают плоскопараллельную пластину, при формировании второго расфокусированного изображения и фона в сходящемся оптическом пучке устанавливают плоскопараллельную пластину толщиной, отличной от толщины первой, при этом разностное изображение формируют вычитанием второго изображения из первого.
| US 2010202654 A1, 12.08.2010 | |||
| US 2010188519 A1, 29.07.2010 | |||
| US 2011085738 A1, 14.04.2011 | |||
| US 4783833 A, 08.11.1988. |

