Изобретение относится к оптико-электронной измерительной технике, а именно к устройствам для измерения координат быстродвижущихся объектов, и может быть использовано для измерения несоконусности лопастей несущего винта вертолета.
Известен способ определения несоконусности лопастей несущего винта вертолета, в соответствии с которым концы вращающихся лопастей проектируются на фотокатод фотоумножителя, а импульсы на выходе фотоумножителя сравниваются с импульсами, образующимися при полном перекрытии щели диафрагмы проекциями вращающихся лопастей несущего винта, и получают величину несоконусности (патент №183449, приоритет от 02.04.1065 г. авторы Феофанов Н.И. и Черюканов А.С.). Недостатком данного способа является его высокая трудоемкость и низкая точность измерений.
Известно устройство для измерения координат быстродвижущихся объектов (см. В.И.Замятин, «Оптико-электронные приборы на основе твердотельных фотоприемников», Барнаул, 1991, с.10). Устройство содержит источник оптического излучения, модулятор светового потока и оптическую головку, включающую объектив, оптически связанное с ним фотоприемное устройство, последовательно соединенное с блоком развертки напряжений и усилителем, а также узел обработки видеосигнала, включающий блоки автоматической регулировки усиления, цифровой обработки информации, селекции и выделения координаты, индикации и вывода информации, последовательно соединенные между собой. В качестве модулятора светового потока использованы источники оптического излучения, закрепленные на законцовках лопастей несущего винта и выполненные, например, мигающими. Установка источников оптического излучения на законцовках лопастей несущего винта вносит изменения в конструкцию и может нарушить балансировку последнего, что может привести к отрыву лопастей и, как следствие, к гибели вертолета и экипажа. Благодаря использованию в качестве фотоприемного устройства фотодиодной линейки устройство обладает большим быстродействием и большей помехоустойчивостью, однако в реальных условиях излучение облаков, топографические детали рельефа земной поверхности, неоднородное излучение атмосферы, отраженное или рассеянное излучение разнообразных источников создают суммарное поле излучения, описываемое только случайной функцией энергетической светимости. Поэтому при определении координат законцовок лопастей вращающегося несущего винта на постоянно меняющемся излучающем фоне, например, при переменной облачности, возникают многочисленные ложные срабатывания, вызванные формированием временных стробов на участках перепада энергетической яркости небесного фона.
Наиболее близким к заявленному решению, взятым за прототип, является способ измерения координат лопастей вращающегося несущего винта вертолета и устройство для его осуществления, описанные в патенте №2180122, приоритет от 2000.05.06, патентообладатель Кузнецов Андрей Михайлович. Устройство содержит источник оптического излучения, модулятор светового потока и оптическую головку, включающую объектив, оптически связанное с ним фотоприемное устройство, последовательно соединенное с усилителем, а также узел обработки видеосигнала, включающий блоки автоматической регулировки усиления, цифровой обработки информации, селекции и выделения координаты, индикации и вывода информации, последовательно соединенные между собой. Устройство снабжено вычитателем, а блок цифровой обработки информации выполнен в виде последовательно соединенных между собой аналого-цифрового преобразователя, запоминающего устройства и цифроаналогового преобразователя, один из выходов блока индикации и вывода информации соединен с вторым входом запоминающего устройства, выход цифроаналогового преобразователя соединен с одним из входов вычитателя, с вторым входом которого соединен выход блока автоматической регулировки усиления, а выход упомянутого вычитателя соединен с входом блока селекции и обработки видеосигнала, кроме того, устройство снабжено датчиком первой лопасти, выход которого связан с одним из входов устройства индикации и вывода информации.
Наличие датчика первой лопасти позволяет точно идентифицировать каждую лопасть несущего винта, но необходимо отметить, что датчик первой лопасти необходимо механически устанавливать на корпусе вертолета снаружи, при этом конструкция вертолета, а именно такие элементы, как дополнительный топливный бак или особенности фюзеляжа вертолета, могут затруднить установку его. Установка датчика первой лопасти снаружи снижает безопасность, поскольку существует опасность отрыва датчика и попадания его в несущий винт вертолета, что может привести к аварии.
Другим недостатком известного устройства является использование аналоговой схемотехники для селекции и обработки видеосигнала, что требует предварительной настройки аналоговых узлов обработки и делает схему зависимой от амплитуды входного видеосигнала, что влияет на точность измерений. Кроме этого устройство не содержит узлов сохранения получаемой в процессе измерения информации, что предполагает наличие дополнительного оборудования, чтобы ее задокументировать, или постоянное дежурство оператора, который будет делать записи вручную. В устройстве применен известный принцип вычисления межкадровой разности для выделения движущихся объектов на фоне стационарных. Поскольку небо малоподвижно по отношению к быстро вращающимся лопастям, в видеосигнале на выходе вычитателя практически устранена модуляция амплитуды на свободной от лопастей части изображения, вызванная небом. Способ получения кадра изображения, не содержащего сигнал лопасти, опирается на использование сигнала с датчика первой лопасти, поскольку предполагает синхронизацию с азимутальным положением лопастей.
Формирование сигнала для компенсации фона осуществляется запоминанием сигнала кадра, полученного между лопастями, что требует уже сформированного отдельно сигнала синхронизации с азимутальным положением лопастей с помощью дополнительного оборудования, для чего используется отдельная схема синхронизации с отдельным оптическим датчиком.
Кроме того, в данном решении для измерения несоконусности лопастей требуется поддержание стабильной амплитуды модуляции светового потока в канале измерения.
Задачей заявленного решения является повышение точности и надежности измерений несоконусности лопастей несущего винта вертолета, а также повышение удобства эксплуатации и упрощение конструкции устройства для измерения.
Поставленная цель достигается за счет того, что в известном способе измерения несоконусности лопастей несущего винта вертолета, включающем маркировку базовой лопасти, проецирование законцовок лопастей на фотоприемное устройство, оцифровку сигнала, формирование опорного кадра изображения, вычитание видеосигнала текущего кадра из видеосигнала опорного кадра, выделение минимальной координаты и вывод информации, опорный кадр изображения формируют путем усреднения всех кадров изображения за период не менее одного оборота несущего винта и подают на формирователь межкадровой разности одновременно с видеосигналом текущего кадра, затем по серии кадров определяют и фиксируют максимальное значение амплитуды разностного видеосигнала, вызванное пролетом мимо фотоприемного устройства законцовки лопасти, и используют его для отслеживания превышения разностным видеосигналом следующей лопасти заданного значения от зафиксированной амплитуды, фиксируют координату первого превышения порога в этом кадре видеосигнала, затем из подряд идущих кадров с превышением порога определяют кадр с минимальной координатой первого превышения порога и сохраняют эту координату отдельно для каждой лопасти как координату законцовки лопасти, затем отдельно для каждой лопасти производят усреднение этой координаты за период нескольких оборотов несущего винта и сохраняют усредненное значение, одновременно разностный видеосигнал запоминают в формирователе изображения лопастей и, после того, как сформируют изображение всех лопастей, запускают алгоритм поиска базовой лопасти, затем проводят нумерацию лопастей от базовой и получают привязку измеренных координат законцовок лопастей к конкретным лопастям несущего винта.
А также за счет того, что оцифрованный видеосигнал подают на формирователь сигнала автоматической регулировки яркости, управляющий диафрагмой объектива, на каждый оборот винта формируют телевизионный кадр, содержащий текущие изображения всех законцовок лопастей, который используют для распознавания базовой лопасти по нанесенной на нее маркировке; с помощью блока измерения временных интервалов фиксируют период генерации отсчетов координат законцовок лопастей, усредняют его и вычисляют скорость вращения несущего винта, а также сигнализируют об ошибке синхронизации в случае выхода очередного интервала за прогнозируемые границы.
Поставленная цель достигается за счет того, что в известном устройстве для измерения несоконусности лопастей несущего винта вертолета, содержащем оптическую головку, включающую объектив и оптически связанное с ним фотоприемное устройство, узел обработки видеосигнала, содержащий компаратор и формирователь межкадровой разности, и узел вывода информации, оптическая головка выполнена содержащей последовательно соединенный с фотоприемным устройством аналого-цифровой преобразователь, а узел обработки видеосигнала содержит формирователь усредненного кадра изображения, амплитудный детектор, блок выделения координат законцовок лопастей, блок усреднения координат законцовок лопастей, формирователь изображения лопастей и блок распознавания первой лопасти, при этом выход формирователя усредненного кадра изображения соединен с входом формирователя межкадровой разности, второй вход которого соединен с выходом аналого-цифрового преобразователя, а выход формирователя межкадровой разности соединен с входом амплитудного детектора, одним из входов компаратора и с входом формирователя изображения лопастей, выход амплитудного детектора соединен со вторым входом компаратора, выход компаратора соединен с входом блока выделения координат законцовок лопастей, выход которого соединен с одним из входов блока усреднения координат законцовок лопастей, и одним из входов формирователя изображения лопастей, второй вход формирователя изображения лопастей соединен с выходом формирователя межкадровой разности, выход блока усреднения координат законцовок лопастей соединен с одним из входов блока распознавания первой лопасти, второй вход которого соединен с выходом формирователя изображения лопастей, выход блока распознавания первой лопасти соединен с одним из входов блока накопления информации и одним из входов блока индикации, второй вход блока накопления информации и блока индикации соединяется с выходом блока усреднения координат законцовок лопастей, третий вход блока накопления информации и блока индикации соединен с выходом формирователя изображения лопастей.
А также за счет того, что фотоприемное устройство выполнено в виде однострочного ПЗС, оптическая головка содержит формирователь сигнала автоматической регулировки яркости, выход которого соединен с объективом, а узел обработки видеосигнала содержит блок измерения временных интервалов, вход которого соединен с выходом компаратора, а выход - с входом блока усреднения координат законцовок лопастей, с входом блока распознавания первой лопасти и с входами блока накопления информации и блока индикации; узел вывода информации содержит блок накопления информации и блок индикации.
Технический результат, получаемый при реализации предложенного изобретения, состоит в том, что формирование опорного видеосигнала для компенсации фона производят усреднением всего сигнала за определенный предыдущий интервал времени, сравнимый со временем оборота винта. Поскольку сумма ширин лопастей составляет менее 5% от периметра несущего винта вертолета, в усредненном сигнале кадра, собранном за время, сравнимое с оборотом винта, искажение фона из-за попавших в общую сумму сигналов от лопастей не превысит 5% от приращения амплитуды текущего видеосигнала, вызванного лопастью. Это искажение останется в разностном сигнале после вычитания опорного видеосигнала из текущего, но оно не оказывает влияния на результат, поскольку в качестве порога для компаратора при поиске начала лопасти в кадре изображения используется, например, 50% уровень от максимальной амплитуды, полученной из разностного сигнала за некоторое предыдущее время, также сравнимое со временем оборота винта. Определение первой лопасти несущего винта осуществляется выделением соответствующего сигнала в процессе обработки изображения, а не применением дополнительного оборудования.
В заявленном устройстве использован полностью цифровой канал без аналоговых элементов обработки, что позволяет применить современные высокоинтегрированные цифровые микросхемы и весь канал обработки разместить в минимальном количестве корпусов микросхем, что позволяет сократить габариты и вес устройства, повысить надежность работы, уменьшить потребление энергии, включить в одно устройство возможность переключения настройки на разные типы винтокрылых машин с разным количеством лопастей, кроме этого в цифровом канале каждый обрабатываемый пиксел фотоприемного устройства имеет свой физический адрес, что позволяет после проведения калибровки измерять расстояния между законцовками лопастей количеством элементов фотоприемника, разделяющим изображения траекторий законцовок лопастей. Таким образом, цифровой канал позволяет сохранить геометрическую привязку объектов к номерам элементов ПЗС, в которых они были обнаружены, и, соответственно, точность измерения относительного положения объектов определяется расстоянием между объектами, переданными двумя соседними элементами ПЗС.
Цифровой поток также можно напрямую записывать на носитель информации и таким образом получить полную видеозапись событий, обработку которой произвести отдельно от режима испытаний.
В заявленном решении не требуется постоянного поддержания максимальной и стабильной амплитуды модуляции светового потока в канале измерения, поскольку вся обработка сигнала происходит в цифровом виде, таким образом, нет настраиваемых на определенные амплитуды сигналов элементов обработки аналогового сигнала и за счет чего обеспечивается увеличение динамического диапазона, позволяющего работать в широком диапазоне освещенности.
Заявленная совокупность признаков неизвестна заявителю из доступных источников информации, на основании чего можно сделать вывод о том, что заявленное решение является новым.
Анализ известных решений показывает, что заявленное решение позволяет осуществить процесс измерения несоконусности лопастей несущего винта вертолета не применявшимися ранее способом и устройством.
Заявленное решение поясняется чертежами, где:
на фиг.1 представлена блок-схема устройства;
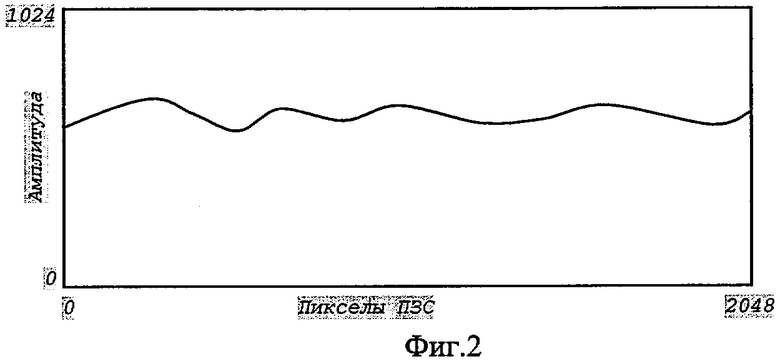
на фиг.2 представлен кадр изображения неба между лопастями;
на фиг.3 представлен кадр изображения лопасти на фоне неба;
на фиг.4 представлен усредненный кадр изображения;
на фиг.5 представлен разностный кадр изображения.
Блок-схема устройства содержит оптическую головку 16, узел обработки сигнала 17 и узел для хранения и отображения информации 18.
В состав оптической головки 16, входит объектив с управляемой диафрагмой 1, фотоприемного устройства (ФПУ) 2 в виде однострочного ПЗС, аналогово-цифровой преобразователь (АЦП) 3 и формирователь сигнала автоматической регулировки яркости (АРЯ) 4.
Узел обработки сигнала 17 содержит формирователь усредненного кадра изображения 5, формирователь межкадровой разности 6, амплитудный детектор 7, компаратор 8, блок выделения координат законцовок лопастей 9, блок усреднения координат законцовок лопастей 11, блок измерения временных интервалов 10, формирователь изображения лопастей 12 и блок распознавания первой лопасти 13.
Узел сохранения и отображения информации 18 состоит из блока накопления информации 14 и блока индикации 15.
Перед началом измерений производят маркировку базовой лопасти и задают необходимые параметры испытуемого вертолета (количество лопастей, расстояние от объектива до законцовки лопасти и т.д.)
Изображение неба, периодически перекрываемое лопастями, попадает через объектив 1 на фотоприемное устройство (ФПУ) 2. Оно представляет собой однострочный прибор с зарядовой связью (ПЗС) с количеством фоточувствительных элементов в строке 2048, поэтому кадр изображения, формируемый ПЗС, это одна строка длиной 2048 элементов. Ориентирован ПЗС в плоскости фокусировки изображения так, что при пересечении лопастью оптической оси объектива строка ПЗС должна быть развернута от законцовки лопасти к оси несущего винта и захватывать область изображения за законцовкой лопасти и часть лопасти. Скорость генерации кадров изображения такова, что за время прохождения очередной лопасти ПЗС сформирует несколько кадров изображения, в которых будет присутствовать сигнал лопасти. Аналоговый сигнал с ФПУ поэлементно оцифровывается с помощью 10-разрядного АЦП 3 и подается на формирователь межкадровой разности 6 и формирователь усредненного кадра изображения 5, который выдает усредненный кадр изображения, просуммировав подряд идущие кадры за время, сравнимое со временем оборота винта. С выхода последнего видеосигнал усредненного кадра подается на формирователь межкадровой разности 6 и на формирователь сигнала автоматической регулировки яркости (АРЯ) 4. Формирователь сигнала АРЯ управляет диафрагмой объектива, поддерживая освещенность ПЗС в пределах, в которых его свет-сигнальная характеристика может считаться линейной, тогда без искажения передаются полутона изображения и контуры объектов на ярком фоне и можно без ограничений проводить арифметические операции суммирования и вычитания над сигналом. Формирователь межкадровой разности 6 вычитает из текущего кадра кадр, усредненный за предыдущий оборот винта, и формирует видеосигнал, не содержащий фоновой составляющей в области изображения, свободной от лопастей. Этот сигнал попадает на амплитудный детектор 7. Детектор в проходящем цифровом потоке кадров фиксирует максимальную амплитуду сигнала, вызванную пролетом лопасти, и сохраняет полученное значение. Текущий видеосигнал межкадровой разности сравнивается компаратором 8 с предустановленным значением, пропорциональным выходному сигналу детектора (максимальной амплитуде сигнала за предыдущий период), например 50% от максимальной амплитуды сигнала за предыдущий период. В случае срабатывания компаратора текущий разностный кадр считается содержащим изображение лопасти, кроме этого номер пиксела изображения, по которому сработал компаратор, запоминается как координата законцовки лопасти блоком выделения координат законцовок лопастей 9. Из подряд идущих кадров, в которых сработал компаратор, блок выделения координат законцовок лопастей 9 определяет минимальную координату законцовки лопасти, которая и считается искомой. Для повышения достоверности измерений в условиях вибрации летательного аппарата, приводящей к погрешности измерения координат законцовок лопастей, маневрирования и ветра, вызывающих покачивания лопастей, применен блок усреднения координат законцовок лопастей 11, в котором координата законцовки каждой лопасти усредняется по заданному количеству оборотов несущего винта. Блок измерения временных интервалов 10 фиксирует периодичность появления серии кадров с признаком наличия сигнала лопасти, усредняет ее и вычисляет реальную скорость вращения несущего винта, кроме этого он прогнозирует временные границы ожидания пролета следующей лопасти перед объективом с учетом инерции несущего винта и в случае их нарушения, например, из-за направления ФПУ против солнца или выхода законцовки лопасти за край области отображения, вырабатывает признак сбоя синхронизации лопастей, вызывающий перезапуск процедуры усреднения координат лопастей. Формирователь изображения лопастей 12 содержит массив памяти, разделенный на сегменты, количество которых соответствует количеству лопастей несущего винта вертолета, а количество строк в сегментах заведомо больше, чем однострочных кадров, на которые проецируется одна пролетающая лопасть при самой медленной рабочей скорости вращения несущего винта. Текущий видеосигнал межкадровой разности с выхода формирователя 6 запоминается в строки текущего сегмента памяти, для подряд идущих кадров, в которых сработал компаратор, затем выбирается следующий сегмент памяти, и запись повторяется при тех же условиях и так далее, пока не заполнятся все сегменты. Таким образом, из общего потока кадров выбираются только содержащие изображение лопасти, что резко уменьшает объем информации, необходимый для дальнейшей обработки. Получается двумерный массив, в котором по 2048 элементов в строках, а в столбцах - количество строк в сегменте, умноженное на количество сегментов. Блок распознавания первой лопасти 13 получает картинку лопастей от формирователя 12 и адрес начала лопасти в каждом сегменте от блока 11 и запускает алгоритм поиска окрашенного пятна на одной из лопастей. После нахождения пятна производится нумерация лопастей от окрашенной базовой. Блок накопления информации 14 позволяет сохранять в произвольные моменты времени измеренные значения взаимного расположения траекторий законцовок лопастей, скорость несущего винта, а также вести видеозапись фрагментами или постоянно поведения законцовок лопастей на разных испытательных режимах с последующим воспроизведением записи. Блок индикации 15 визуально отображает взаимное расположение законцовок лопастей в вертикальной плоскости, относительное смещение траекторий законцовок в миллиметрах, нумерацию лопастей, скорость вращения несущего винта и другие параметры. Технически блоки 13, 14 и 15 выполнены в виде ноутбука с соответствующим программным обеспечением.
Во время испытаний на экране компьютера блока обработки сигнала в реальном масштабе времени отображается положение лопастей и производятся измерения несоконусности во всех режимах. Для повышения надежности измерений на визуальную индикацию помимо значений несоконусности выводится телевизионное изображение лопастей, что позволяет визуально оценить правильность работы измерительной схемы прибора. Компьютер блока обработки оснащен программным обеспечением для анализа полученной информации об испытаниях и выработки рекомендаций по регулировке. Вся полученная при испытаниях информация сохраняется в компьютерной базе данных и может быть использована для дальнейшей обработки. Аппаратура легко перенастраивается для различных типов вертолетов, имеющих разную длину и ширину лопастей и их количество.



Изобретение относится к оптико-электронной измерительной технике и может быть использовано для измерения несоконусности лопастей несущего винта вертолета. Способ измерения несоконусности заключается в том, что опорный кадр изображения формируют путем усреднения всех кадров изображения за период не менее одного оборота несущего винта и подают на формирователь межкадровой разности одновременно с видеосигналом текущего кадра. Определяют и фиксируют максимальное значение амплитуды разностного видеосигнала. Используют его для отслеживания превышения разностным видеосигналом следующей лопасти заданного значения от зафиксированной амплитуды, фиксируют координату первого превышения порога. Определяют кадр с минимальной координатой первого превышения порога и сохраняют эту координату. Производят усреднение этой координаты за период нескольких оборотов несущего винта. Запускают алгоритм поиска базовой лопасти. Устройство для измерения несоконусности лопастей несущего винта вертолета содержит блок вывода информации, оптическую головку, включающую объектив, оптически связанное с ним фотоприемное устройство и последовательно соединенный с фотоприемным устройством аналого-цифровой преобразователь и узел обработки видеосигнала, содержащий компаратор, формирователь межкадровой разности, формирователь усредненного кадра изображения, амплитудный детектор, блок выделения координат законцовок лопастей, блок усреднения координат законцовок лопастей, формирователь изображения лопастей и блок распознавания первой лопасти. Технический результат - повышение точности, надежности и удобства измерений. 2 н. и 7 з.п. ф-лы, 5 ил.
1. Способ измерения несоконусности лопастей несущего винта вертолета, включающий маркировку базовой лопасти, проецирование законцовок лопастей на фотоприемное устройство, оцифровку сигнала, формирование опорного кадра изображения, вычитание видеосигнала текущего кадра из видеосигнала опорного кадра, выделение минимальной координаты и вывод информации, отличающийся тем, что опорный кадр изображения формируют путем усреднения всех кадров изображения за период не менее одного оборота несущего винта и подают на формирователь межкадровой разности одновременно с видеосигналом текущего кадра, затем по серии кадров определяют и фиксируют максимальное значение амплитуды разностного видеосигнала, вызванное пролетом мимо фотоприемного устройства законцовки лопасти, и используют его для отслеживания превышения разностным видеосигналом следующей лопасти заданного значения от зафиксированной амплитуды, фиксируют координату первого превышения порога в этом кадре видеосигнала, затем из подряд идущих кадров с превышением порога определяют кадр с минимальной координатой первого превышения порога и сохраняют эту координату отдельно для каждой лопасти как координату законцовки лопасти, затем отдельно для каждой лопасти производят усреднение этой координаты за период нескольких оборотов несущего винта и сохраняют усредненное значение, одновременно разностный видеосигнал запоминают в формирователе изображения лопастей, и после того, как сформируют изображение всех лопастей, запускают алгоритм поиска базовой лопасти, затем проводят нумерацию лопастей от базовой и получают привязку измеренных координат законцовок лопастей к конкретным лопастям несущего винта, на основе полученных данных производят измерение несоконусности во всех режимах.
2. Способ измерения несоконусности по п.1, отличающийся тем, что оцифрованный видеосигнал подают на формирователь сигнала автоматической регулировки яркости, управляющий диафрагмой объектива.
3. Способ измерения несоконусности по п.1, отличающийся тем, что с помощью блока измерения временных интервалов фиксируют период генерации отсчетов координат законцовок лопастей, усредняют его и вычисляют скорость вращения несущего винта, а также сигнализируют об ошибке синхронизации в случае выхода очередного интервала за прогнозируемые границы.
4. Способ измерения несоконусности по п.1, отличающийся тем, что на каждый оборот винта формируют телевизионный кадр, содержащий текущие изображения всех законцовок лопастей, который используют для распознавания базовой лопасти по нанесенной на нее маркировке.
5. Устройство для измерения несоконусности лопастей несущего винта вертолета, содержащее оптическую головку, включающую объектив и оптически связанное с ним фотоприемное устройство, узел обработки видеосигнала, содержащий компаратор и формирователь межкадровой разности, и узел вывода информации, отличающееся тем, что оптическая головка выполнена содержащей последовательно соединенный с фотоприемным устройством аналого-цифровой преобразователь, а узел обработки видеосигнала содержит формирователь усредненного кадра изображения, амплитудный детектор, блок выделения координат законцовок лопастей, блок усреднения координат законцовок лопастей, формирователь изображения лопастей и блок распознавания первой лопасти, при этом выход формирователя усредненного кадра изображения соединен с входом формирователя межкадровой разности, второй вход которого соединен с выходом аналого-цифрового преобразователя, а выход формирователя межкадровой разности соединен с входом амплитудного детектора и одним из входов компаратора, выход амплитудного детектора соединен со вторым входом компаратора, выход компаратора соединен с входом блока выделения координат законцовок лопастей, выход которого соединен с одним из входов блока усреднения координат законцовок лопастей, и одним из входов формирователя изображения лопастей, второй вход формирователя изображения лопастей соединен с выходом формирователя межкадровой разности, выход блока усреднения координат законцовок лопастей соединен с одним из входов блока распознавания первой лопасти, второй вход которого соединен с выходом формирователя изображения лопастей, выход блока распознавания первой лопасти соединен с одним из входов блока накопления информации и одним из входов блока индикации, второй вход блока накопления информации и блока индикации соединяется с выходом блока усреднения координат законцовок лопастей, третий вход блока накопления информации и блока индикации соединен с выходом формирователя изображения лопастей.
6. Устройство для измерения несоконусности лопастей несущего винта вертолета по п.5, отличающееся тем, что фотоприемное устройство выполнено в виде однострочного ПЗС.
7. Устройство для измерения несоконусности лопастей несущего винта вертолета по п.5, отличающееся тем, что оптическая головка содержит формирователь сигнала автоматической регулировки яркости, выход которого соединен с объективом.
8. Устройство для измерения несоконусности лопастей несущего винта вертолета по п.5, отличающееся тем, что узел обработки видеосигнала содержит блок измерения временных интервалов, вход которого соединен с выходом компаратора, а выход - с входом блока усреднения координат законцовок лопастей, с входом блока распознавания первой лопасти и с входами блока накопления информации и блока индикации.
9. Устройство для измерения несоконусности лопастей несущего винта вертолета по п.5, отличающееся тем, что узел вывода информации содержит блок накопления информации и блок индикации.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ЛОПАСТЕЙ ВРАЩАЮЩЕГОСЯ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2000 |
|
RU2180122C2 |
| ПАТЕНТНО- *л'^ Пх:)П":;с!:ла '*ВИЬ-ii.-, ti ^ | 0 |
|
SU183449A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ НЕСОКОНУСНОСТИ НЕСУЩИХ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 0 |
|
SU360277A1 |
| СПОСОБ НАБЛЮДЕНИЯ МАХОВОГО ДВИЖЕНИЯ ЖЕСТКИХ ЛОПАСТЕЙ СООСНЫХ ВИНТОВ | 0 |
|
SU171741A1 |
| Устройство для определения геометрических параметров работающего несущего винта | 1970 |
|
SU342517A1 |
| US 4337497 A, 29.06.1982 | |||
| ЗАМЯТИН В.И | |||
| Оптико-электронные приборы на основе твердотельных фотоприемников | |||
| - Барнаул, 1991, с.10. | |||

