Изобретение относится к медицинской технике и может быть использовано в робототехнической системе при выполнении различных медицинских процедур.
Известно устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления (см. Патент по заявке № u 201114980 AU от 05.01.2012 г.), которое включает вертикальный корпус хирургического стола с возможностью изменения высоты, который закреплен в нижней его части к основанию стола, выполненного в виде полого цилиндра с внешними ребрами жесткости и неподвижно расположенного на поверхности пола. При этом в основание стола введен дополнительный полый цилиндр с внешними ребрами жесткости, в котором закреплена нижняя цилиндровая часть устройства подъема трех корпусов с внешней сферической поверхностью для диагностических и хирургических элементов, при этом устройство подъема выполнено в виде первой и второй частей с возможностью совместимого крепления, между которыми в верхней их части закреплен осевой стержень с двумя разнесенными подшипниками, на которых закреплены три корпуса с внешней сферической поверхностью и объединенных между собой общей шестеренкой, которая функционально связана с шестеренкой повода с редуктором, закрепленным на устройстве подъема для их совместимого вращения (прототип).
Недостатком известного устройства подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы является ограничение его функциональных возможностей, поскольку не могут быть одновременно использованы как диагностические, так и хирургические исполнительные элементы сферических робототехнических систем.
Техническим результатом предложенного изобретения является усовершенствование известного устройства подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы для одновременного проведения хирургической процедуры и реанимации.
Указанный технический результат достигается следующим устройством.
Устройство напольного варианта сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно компьютерного управления, включающее инструментальный и хирургический стол с возможностью разворота и продольного смещения, три сферических корпуса с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, выполненные с возможностью разворота и вертикального возвратно-поступательного смещения, устройство разворота, в цилиндрическом корпусе которого закреплен привод с редуктором, внешняя шестеренка которого функционально связана с внутренней зубчатой поверхностью внутренней части цилиндрического корпуса со съемной верхней крышкой, которая расположена в нем с возможностью вращения, первый линейный привод с двумя соосными цилиндрическими направляющими с меньшим и большем диаметром с возможностью взаимно противоположного смещения друг относительно друга для смещения робототехнической системы, первый и второй привод с редуктором, второй линейный привод, при этом съемная верхняя часть крышки внутренней части цилиндрического корпуса соединена с осью ротора первого привода с редуктором, а статорная его часть зафиксирована с корпусом первого линейного привода с двумя соосными цилиндрическими направляющими с меньшим и большем диаметром, которые закреплены на неподвижной и выдвижной части первого линейного привода, при этом выдвижная часть первого линейного привода закреплена на статорной части второго привода с редуктором, внешняя часть ротора которого зафиксирована с корпусом второго линейного привода, на выдвижной части которого последовательно закреплены привод разворота и посредством разнесенных подшипников шайба с внутренней зубчатой поверхностью, которая функционально связана с внешней шестеренкой привода разворота, при этом на внешней стороне шайбы зафиксированы три сферических корпуса с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, позиционно расположенных над хирургическим и инструментальным столом.
На чертеже изображено устройство напольного варианта сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления.
Устройство напольного варианта сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления содержит инструментальный стол 1 и хирургический стол 2 с возможностью разворота и продольного смещения, а также три сферических корпуса 3 с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, выполненные с возможностью разворота и вертикального возвратно-поступательного смещения, в которых нижняя часть 4 выполнена с возможностью смещения для выхода из сферических корпусов 3 соответствующих исполнительных элементов. Устройство вертикального смещения 5 включает линейный привод 6 и устройство разворота 7, в цилиндрическом корпусе 8 которого закреплен привод с редуктором 9, внешняя шестеренка которого функционально связана с внутренней зубчатой поверхностью 10 внутренней части цилиндрического корпуса 11 со съемной верхней крышкой 12. Напольный вариант робототехнической системы также включает линейный привод 13 с двумя соосными цилиндрическими направляющими 14 и 15 с меньшим и большим диаметром с возможностью взаимно противоположного смещения друг относительно друга для смещения робототехнической системы. Напольный вариант робототехнической системы также включает первый 16 и второй 17 привод с редуктором и второй линейный привод 18. При этом съемная верхняя часть крышки 12 внутренней части цилиндрического корпуса 11 соединена с осью 19 ротора первого привода с редуктором 16, а статорная его часть зафиксирована с корпусом первого линейного привода 13 с двумя соосными цилиндрическими направляющими 14 и 15 с меньшим и большим диаметром, которые закреплены на неподвижной 20 и выдвижной 21 части первого линейного привода 13, при этом выдвижная часть 21 первого линейного привода 13 закреплена на статорной части второго привода с редуктором 17, внешняя часть ротора 22 которого зафиксирована с корпусом второго линейного привода 18, на выдвижной части 23 которого последовательно закреплен привод разворота 24 и посредством разнесенных подшипников шайба с внутренней зубчатой поверхностью 25, которая функционально связана с внешней шестеренкой привода разворота 24, при этом на внешней стороне шайбы зафиксированы три сферических корпуса 3 с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, позиционно расположенных над хирургическим столом 1 и инструментальным столом 2.
Устройство напольного варианта сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления в данном исполнении может быть одновременно использовано для проведения хирургической операции и реанимации, поскольку позиционное положение над хирургическим столом 1 и инструментальным столом 2 трех корпусов 3 с внешней сферической поверхностью, в которых находятся исполнительные элементы робототехнической системы, позволяет их использовать одновременно. Поскольку в нижней части 4 трех корпусов 3 с внешней сферической поверхностью выполнены с возможностью смещения для выхода диагностических, реанимационных и хирургические исполнительных элементов. А для этого устройство включает инструментальный стол 1 и хирургический стол 2 с возможностью разворота и продольного смещения, а также три сферических корпуса 3 с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, выполненные с возможностью разворота и вертикального возвратно-поступательного смещения, в которых нижняя часть 4 выполнена с возможностью смещения для выхода из сферических корпусов 3 соответствующих исполнительных элементов. Устройство вертикального смещения 5 включает линейный привод 6 и устройство разворота 7, в цилиндрическом корпусе 8 которого закреплен привод с редуктором 9, внешняя шестеренка которого функционально связана с внутренней зубчатой поверхностью 10 внутренней части цилиндрического корпуса 11 со съемной верхней крышкой 12. Напольный вариант робототехнической системы также включает линейный привод 13 с двумя соосными цилиндрическими направляющими 14 и 15 с меньшим и большим диаметром с возможностью взаимно противоположного смещения друг относительно друга для смещения робототехнической системы. Напольный вариант робототехнической системы также включает первый 16 и второй 17 привод с редуктором и второй линейный привод 18. При этом съемная верхняя часть крышки 12 внутренней части цилиндрического корпуса 11 соединена с осью 19 ротора первого привода с редуктором 16, а статорная его часть зафиксирована с корпусом первого линейного привода 13 с двумя соосными цилиндрическими нанравляющими 14 и 15 с меньшим и большем диаметром, которые закреплены на неподвижной 20 и выдвижной 21 части первого линейного привода 13, при этом выдвижная часть 21 первого линейного привода 13 закреплена на статорной части второго привода с редуктором 17, внешняя часть ротора 22 которого зафиксирована с корпусом второго линейного привода 18, на выдвижной части 23 которого последовательно закреплен привод разворота 24 и посредством разнесенных подшипников шайба с внутренней зубчатой поверхностью 25, которая функционально связана с внешней шестеренкой привода разворота 24, при этом на внешней стороне шайбы зафиксированы три сферических корпуса 3 с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, позиционно расположенных над хирургическим столом 1 и инструментальным столом 2.
Использование предложенного технического решения позволяет расширить функциональные возможности устройства подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления, появляется возможность одновременного использования исполнительных элементов нескольких сферических корпусов.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Устройство напольного варианта сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления включает инструментальный и хирургический стол с возможностью разворота и продольного смещения, три сферических корпуса с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, выполненные с возможностью разворота и вертикального возвратно-поступательного смещения, и расположены над хирургическим столом. 1 ил.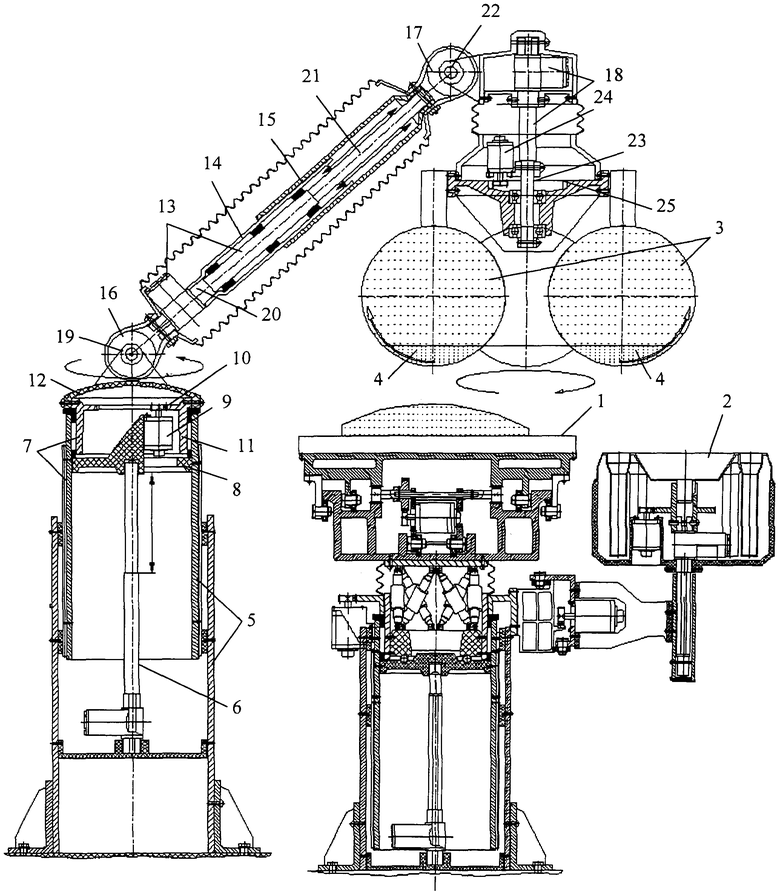
Устройство напольного варианта сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления, включающее инструментальный и хирургический стол с возможностью разворота и продольного смещения, три сферических корпуса с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, выполненные с возможностью разворота и вертикального возвратно-поступательного смещения, устройство разворота, в цилиндрическом корпусе которого закреплен привод с редуктором, внешняя шестеренка которого функционально связана с внутренней зубчатой поверхностью внутренней части цилиндрического корпуса со съемной верхней крышкой, которая расположена в нем с возможностью вращения, первый линейный привод с двумя соосными цилиндрическими направляющими с меньшим и большим диаметром с возможностью взаимно противоположного смещения друг относительно друга для смещения робототехнической системы, первый и второй привод с редуктором, второй линейный привод, отличающееся тем, что съемная верхняя часть крышки внутренней части цилиндрического корпуса соединена с осью ротора первого привода с редуктором, а статорная его часть зафиксирована с корпусом первого линейного привода с двумя соосными цилиндрическими направляющими с меньшим и большим диаметром, которые закреплены на неподвижной и выдвижной части первого линейного привода, при этом выдвижная часть первого линейного привода закреплена на статорной части второго привода с редуктором, внешняя часть ротора которого зафиксирована с корпусом второго линейного привода, на выдвижной части которого последовательно закреплены привод разворота и посредством разнесенных подшипников шайба с внутренней зубчатой поверхностью, которая функционально связана с внешней шестеренкой привода разворота, при этом на внешней стороне шайбы зафиксированы три сферических корпуса с исполнительными элементами диагностико-хирургической и реанимационной робототехнической системы, позиционно расположенных над хирургическим и инструментальным столом.
| ЗЕМЛЕРОЙНАЯ МАШИНА НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 0 |
|
SU164843A1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| МАНИПУЛЯЦИОННАЯ СИСТЕМА | 2008 |
|
RU2389599C2 |
| DE 19536514 A1, 14.04.1996 | |||

