Область и уровень техники
Настоящее изобретение относится к способу регулирования линейного положения седельно-сцепного устройства (ССУ) тягача согласно преамбуле п.1 формулы изобретения и к системе для регулирования линейного положения ССУ тягача согласно преамбуле п.4 формулы изобретения во время движения транспортного средства. Изобретение относится также к компьютерной программе, содержащей управляющую компьютерную программу для осуществления способа согласно изобретению, и к электронному блоку управления.
Тягач для полуприцепов обычно снабжен соединительным средством, обычно известным как седельно-сцепное устройство (ССУ). ССУ установлено на раме тягача в задней части тягача. ССУ содержит выемку, проходящую назад, для размещения сцепного устройства в виде, так называемого, шкворня прицепного механизма полуприцепа, выступающего вниз от рамы полуприцепа у переднего края полуприцепа. Шкворень прицепного механизма полуприцепа надежно фиксируют в выемке ССУ с помощью фиксирующего средства.
Из документов WO 2007/068762 A1, US 2008/0036173 A1 и DE 10 2007031318 A1 известно применение автоматического регулирования линейного положения ССУ, установленного с возможностью перемещения таким образом, чтобы оно перемещалось вперед для уменьшения зазора между кабиной управления тягача и полуприцепом в ответ на увеличение скорости транспортного средства и назад для увеличения зазора между кабиной управления и полуприцепом в ответ на уменьшение скорости транспортного средства. Перемещение ССУ вперед осуществляют для уменьшения сопротивления воздуха при движении автопоезда на больших скоростях. Наличие зазора между кабиной управления и полуприцепом ведет к увеличению турбулентности воздуха, в результате чего усиливается сопротивление воздуха. Чем больше зазор, тем сильнее становится турбулентность воздуха, а чем сильнее турбулентность воздуха, тем больше становится сопротивление воздуха. Уменьшение зазора, таким образом, ведет к уменьшению сопротивления воздуха и, следовательно, к уменьшению потребления топлива тягачом. Однако уменьшение зазора между кабиной управления и полуприцепом является неблагоприятным фактором с точки зрения способности выполнения автопоездом поворота, заключающимся в невозможности совершения крутых поворотов, когда этот зазор мал. Если зазор между кабиной управления и полуприцепом слишком мал, то передний край полуприцепа может ударять по задней стороне кабины управления при выполнении транспортным средством крутого поворота с возможными последствиями, выражающимися в больших повреждениях кабины управления и полуприцепа. При движении автопоезда с большой скоростью могут иметь место и другие причины невозможности выполнения автопоездом слишком крутых поворотов, и зазор между кабиной управления и полуприцепом при этом может быть малым. При меньших скоростях движения автопоезд может выполнять крутые повороты, но в этих случаях зазор между кабиной управления и полуприцепом должен быть больше для обеспечения возможности выполнения таких крутых поворотов.
Цель изобретения
Целью настоящего изобретения является предложение нового и благоприятного способа осуществления перемещения ССУ тягача вперед, во время движения транспортного средства, для уменьшения зазора между кабиной управления тягача и полуприцепом в ответ на увеличение скорости транспортного средства и перемещения ССУ назад для увеличения зазора между кабиной управления и полуприцепом в ответ на уменьшение скорости транспортного средства.
Краткое описание изобретения
Согласно настоящему изобретению упомянутую цель достигают посредством применения способа, обладающего признаками, определенными в п.1 формулы изобретения, и системы, обладающей признаками, определенными в п.4 формулы изобретения.
Согласно изобретению:
- перемещение ССУ вперед, выполняемое в ответ на увеличение скорости транспортного средства для уменьшения зазора между кабиной управления и полуприцепом, осуществляется с большей скоростью перемещения ССУ в то время, когда тягач выполняет операцию переключения передач, чем в то время, когда тягач не выполняет операцию переключения передач; и/или
- подается команда на торможение полуприцепа относительно тягача, когда должно быть осуществлено перемещение ССУ назад для увеличения зазора между кабиной управления и полуприцепом в ответ на уменьшение скорости транспортного средства, чтобы, таким образом, способствовать перемещению ССУ назад.
При ускорении тягача сила, действующая на ССУ со стороны полуприцепа, направлена назад, и в этой ситуации, таким образом, требуется приложение относительно большей силы для перемещения ССУ в нужном направлении вперед к кабине управления. При переключении передач тягачом уменьшается ускорение тягача и, следовательно, также уменьшается сила, действующая в направлении назад, прикладываемая полуприцепом к ССУ через его средства сцепления. Таким образом, с помощью переключающего устройства, посредством которого управляют перемещением ССУ, осуществляют нужное перемещение вперед с большей скоростью перемещения в то время, когда тягач выполняет операцию переключения передач, чем в то время, когда тягач не выполняет операцию переключения передач, без какой-либо потребности в увеличении силы, с которой действует переключающее устройство на ССУ. Увеличением скорости перемещения ССУ во время выполнения операции переключения передач обеспечивают возможность более быстрого достижения требуемого линейного положения ССУ и, следовательно, достижения линейного положения, при котором имеет место уменьшенная турбулентность воздуха и, в результате, уменьшенное потребление топлива.
При замедлении движения тягача сила, действующая на ССУ со стороны полуприцепа, направлена вперед, и в этой ситуации требуется, таким образом, относительно большая сила для перемещения ССУ в нужном направлении назад от кабины управления. Некоторое торможение полуприцепа относительно тягача в ответ на уменьшение скорости транспортного средства ведет к уменьшению силы, направленной вперед, с которой полуприцеп действует на ССУ, и сила, с которой полуприцеп действует на ССУ, может быть даже направлена назад. Требуемому перемещению ССУ назад, таким образом, способствуют посредством торможения полуприцепа относительно тягача. Требуемое линейное положение может быть, таким образом, достигнуто более быстро и с приложением меньшей силы со стороны переключающего устройства, что способствует повышению безопасности дорожного движения и, в то же самое время, уменьшению габаритов переключающего устройства.
Другие предпочтительные признаки способа и системы согласно изобретению определены в зависимых пунктах формулы изобретения и в описании, приведенном ниже.
Изобретение относится также к компьютерной программе, обладающей признаками, определенными в п.9 формулы изобретения, и к электронному блоку управления, обладающему признаками, определенными в п.11 формулы изобретения.
Краткое описание чертежей
Далее изобретение описано более подробно со ссылками на варианты осуществления, проиллюстрированные на прилагаемых чертежах, на которых
фиг.1 - вид сбоку автопоезда, содержащего тягач и полуприцеп, присоединенный к последнему;
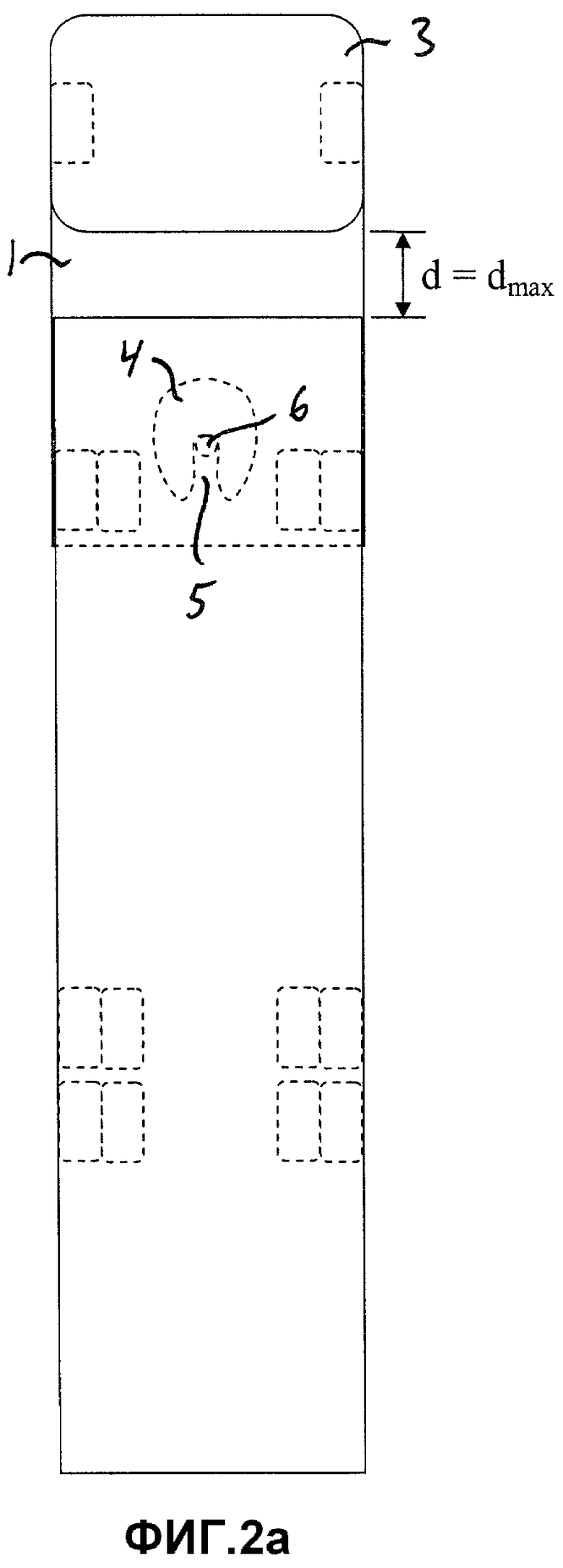
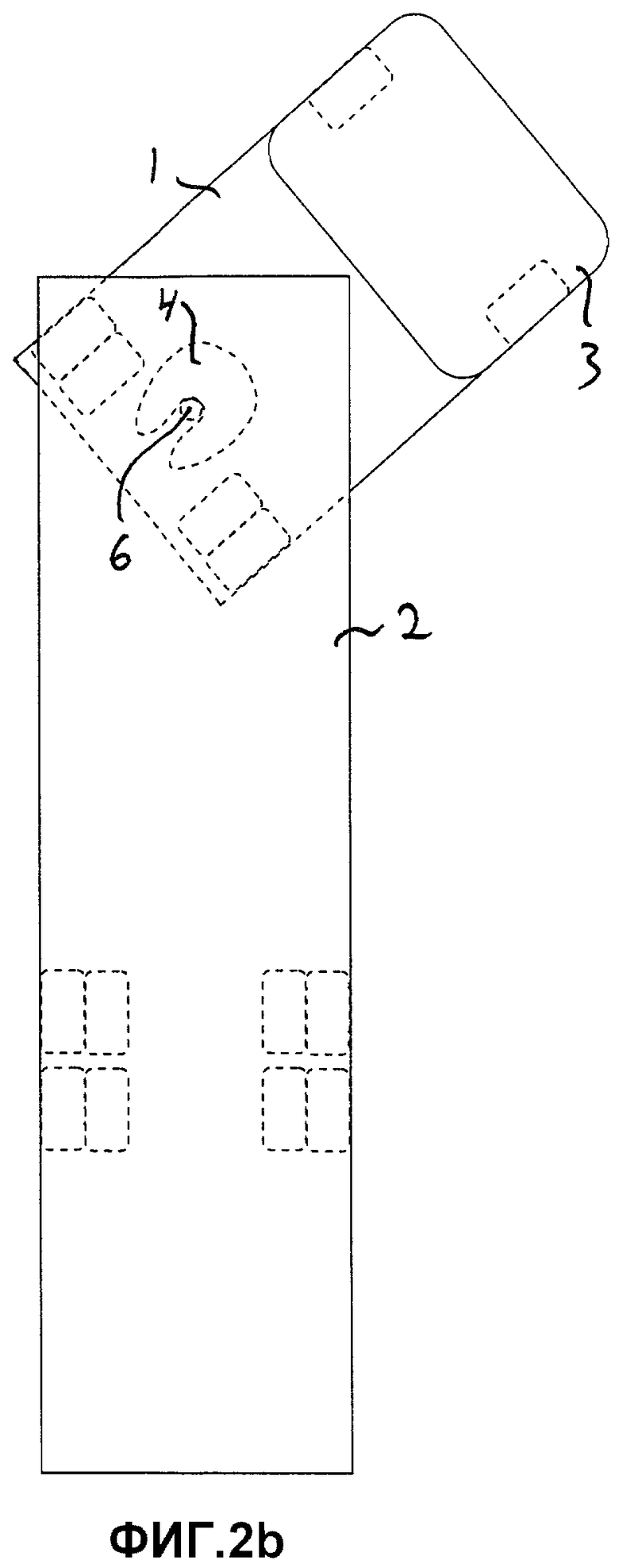
фиг.2a-2b - схематический вид сверху автопоезда согласно фиг.1, с ССУ тягача в первом линейном положении;
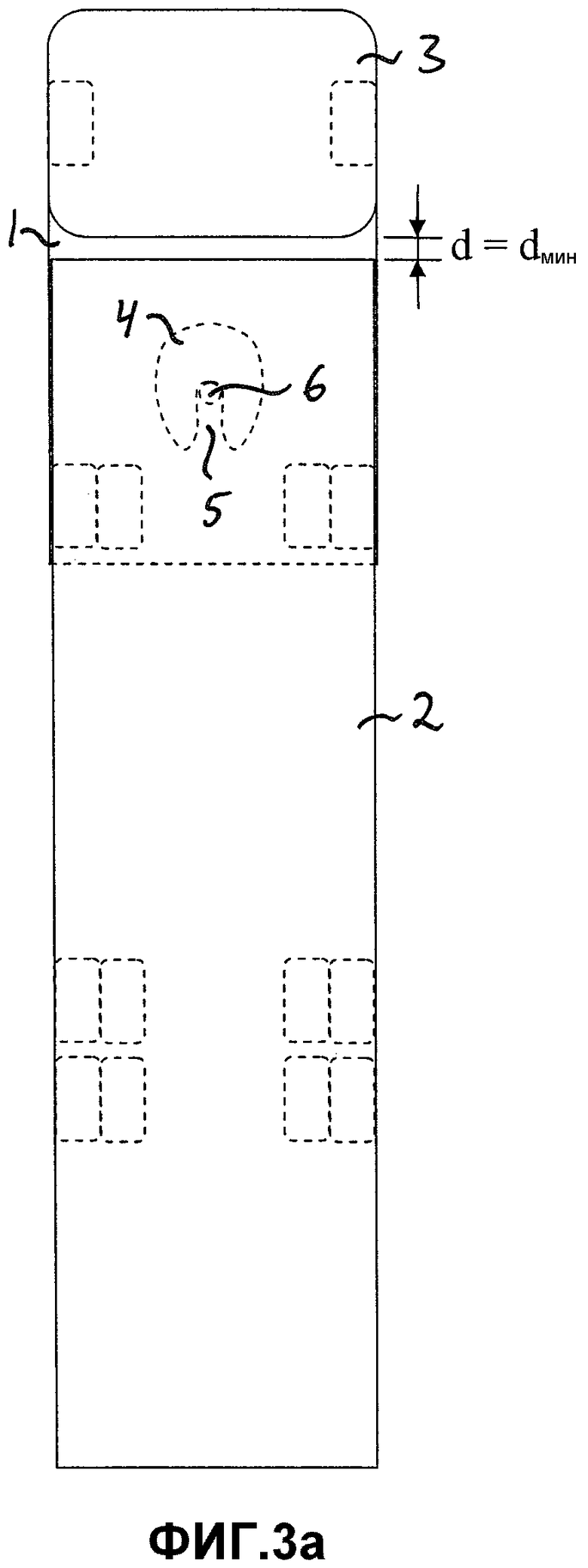
фиг.3a-3b - схематический вид сверху автопоезда согласно фиг.1, с ССУ тягача во втором линейном положении;
фиг.4 - блок-схема системы согласно варианту осуществления настоящего изобретения;
фиг.5 - блок-схема электронного блока управления для осуществления способа согласно изобретению; и
фиг.6 - структурная схема, иллюстрирующая способ согласно варианту осуществления изобретения.
Подробное описание вариантов осуществления изобретения
На фиг.1 показан схематически автопоезд, содержащий тягач 1 и полуприцеп 2, присоединенный к тягачу. Тягач 1 снабжен кабиной управления 3 и средством сцепления ССУ 4 в виде, так называемого, «пятого колеса». ССУ 4 установлено позади кабины управления 3 на задней части тягача 1. ССУ 4 содержит выемку 5, проходящую назад, для размещения средства сцепления 6 (см. фиг.2-3), известного как шкворень прицепного механизма полуприцепа, который выступает вниз от рамы полуприцепа около переднего края полуприцепа 2. Средство сцепления 6 надежно фиксируют в выемке ССУ с помощью фиксирующего средства. Фиксирующее средство имеет обычную конфигурацию и не изображено на чертежах. Полуприцеп 2, таким образом, присоединен к тягачу 1 путем сопряжения средства сцепления 6 полуприцепа и ССУ 4 тягача.
ССУ 4 установлено с возможностью перемещения относительно кабины управления 3 в продольном направлении тягача и может быть выставлено в различных линейных положениях относительно кабины управления 3 с помощью переключающего устройства 21 (см. фиг.4), являющегося частью системы 20 согласно настоящему изобретению, выполненного таким образом, чтобы с его помощью можно было автоматически регулировать линейное положение ССУ при движении транспортного средства. ССУ 4 можно перемещать на заданное расстояние вперед и назад в продольном направлении тягача для обеспечения возможности регулирования зазора между ССУ 4 и кабиной управления 3 и, следовательно, зазора d между кабиной управления 3 и полуприцепом 2.
На фиг.2a и 2b показан схематически автопоезд с ССУ 4 в его крайнем заднем положении, т.е. расположенным с максимальным зазором dmax между кабиной управления 3 и полуприцепом 2. Как показано на фиг.2b, тягач 1 в этом случае обладает полной способностью выполнения поворота относительно полуприцепа 2 и может выполнять крутой поворот без соударения кабины управления 3 с полуприцепом.
На фиг.3a и 3b показан схематически автопоезд с ССУ 4 в его крайнем переднем положении, т.е. расположенным с минимальным зазором dmin между кабиной управления 3 и полуприцепом 2. Как показано на фиг.3b, тягач 1 в этом случе обладает ограниченной способностью выполнения поворота относительно полуприцепа 2, и кабина управления 3 может соударяться с передним краем полуприцепа даже при выполнении тягачом поворота при малом угле относительно полуприцепа.
В примере, показанном на фиг.4, ССУ 4 установлено на каретке 9, которая установлена с возможностью скольжения вдоль двух направляющих 10 каретки. Эти направляющие 10 каретки надежно присоединены к раме тягача и проходят в продольном направлении тягача. При перемещении каретки 9 вперед и назад вдоль направляющих 10 каретки происходит, таким образом, перемещение ССУ 4 вперед и назад в продольном направлении тягача. Каретка 9 установлена с возможностью перемещения вдоль направляющих 10 каретки с помощью упомянутого выше переключающего устройства 21 в любом требуемом направлении. В показанном примере переключающее устройство 21 содержит гидравлический цилиндр 22 двустороннего действия и клапанное устройство 23 для управления потоком рабочей жидкости, подаваемой в гидравлический цилиндр и отводимой из него. Показанный гидравлический цилиндр 22 содержит цилиндр 22a, надежно присоединенный к раме тягача, и поршень, размещенный в этом цилиндре с возможностью перемещения относительно цилиндра и содержащий шток 22b поршня, прикрепленный к каретке 9. На фиг.4 показано схематически пунктирными линиями фиксирующее устройство 29, которое можно вводить в действие для надежной фиксации каретки 9 и, следовательно, ССУ 4, в требуемых положениях относительно направляющих 10 каретки в то время, когда не требуется изменять выставленное положение ССУ, чтобы, таким образом, уменьшить нагрузку на переключающее устройство 21 и обеспечить возможность исключения непреднамеренного перемещения ССУ. При необходимости перемещения ССУ 4 в каком-либо направлении для изменения его выставленного положения фиксирующее устройство 29 отключают, чтобы, таким образом, освободить каретку 9 для перемещения относительно направляющих 10 каретки в ответ на действие переключающего устройства 21.
В качестве альтернативы описанному выше способу переключающее устройство 21 ССУ может быть выполнено некоторым иным известным способом. Переключающее устройство может быть, например, приспособлено к перемещению ССУ с помощью резьбового стержня и гайки, которые можно вводить в действие с помощью приводного двигателя согласно способу, описанному в документе США 2008/0036173 A1; с помощью пневматических сильфонов с пружинной нагрузкой согласно способу, описанному в документе DE 102007031318 A1, или с помощью одного или более пневматических цилиндров.
Система регулирования 20 содержит электронный блок управления 24 для управления переключающим устройством 21 и фиксирующим устройством 29. Этот блок управления 24 может быть выполнен в виде одного электронного блока управления для тягача, как это показано на фиг.4, или в виде двух или большего числа взаимодействующих электронных блоков управления. В примере, показанном на фиг.4, блок управления 24 приспособлен к посылке управляющих сигналов в клапанное устройство 23 для регулирования подачи потока рабочей жидкости в гидравлический цилиндр 22 и из него, для регулирования, таким образом, линейного положения ССУ 4. Блок управления 24 также приспособлен к посылке управляющих сигналов к фиксирующему устройству 29 для управления последним, для его приведения в действие и выключения.
Блок управления 24 приспособлен к определению заданного значения fbör линейного положения ССУ 4 на основании скорости транспортного средства, и к управлению переключающим устройством 21 на основании заданного значения fbör таким образом, чтобы ССУ понуждалось к занятию линейного положения вдоль направляющих 10 каретки, которое соответствует требуемому заданному значению. Блок управления 24 может быть приспособлен к обеспечению упомянутого заданного значения fbör посредством бесступенчатого или пошагового регулирования в заданном диапазоне на основании скорости транспортного средства.
Информация о превалирующей скорости тягача 1 может передаваться в блок управления 24 непосредственно от датчика 25, приспособленного к определению скорости транспортного средства, или от электронного блока управления, соединенного с таким датчиком. Скорость транспортного средства можно определять, например, на основании измеренных показаний датчиков скорости колес или на основании измеренных значений скорости вращения некоторого элемента ведущего вала тягача, например выходного вала коробки передач тягача.
Блок управления 24 дополнительно приспособлен к получению или определению действительного значения fär, которое представляет превалирующее линейное положение ССУ 4. Информация о превалирующем линейном положении ССУ 4 может передаваться в блок управления 24 от датчика 26, приспособленного к определению линейного положения ССУ. Посредством сравнения заданного значения fbör с действительным значением fär с помощью блока управления 24 определяют, должно ли быть осуществлено перемещение ССУ 4 вперед к кабине управления 3 или назад от кабины управления с помощью переключающего устройства 21 для понуждения к тому, чтобы действительное значение fär соответствовало заданному значению fbör.
Блок управления 24 приспособлен к управлению переключающим устройством 21 на основании заданного значения fbör таким образом, чтобы перемещение вперед ССУ 4 для уменьшения зазора между кабиной управления 3 и полуприцепом 2, в ответ на увеличение скорости транспортного средства, осуществлялось с помощью переключающего устройства 21 с большей скоростью перемещения ССУ в то время, когда тягач 1 выполняет операцию переключения передач, чем в то время, когда тягач 1 не выполняет операцию переключения передач. Например, предварительно определенную первую скорость перемещения ССУ v1 можно использовать тогда, когда тягач 1 не выполняет переключение передач, а предварительно определенную вторую скорость перемещения ССУ v2, большую первой скорости перемещения v1, можно использовать тогда, когда тягач 1 выполняет переключение передач. Для обеспечения возможности такого режима управления скоростью перемещения ССУ блок управления 24 приспособлен к получению от электронного блока управления 27 тягача, например, блока управления коробкой передач тягача, информации, которая указывает на начало или окончание операции переключения передач тягачом. Во время осуществления перемещения вперед ССУ 4 к кабине управления 3, выполняемой по команде блока управления 24, скорость, с которой переключающее устройство перемещает ССУ, может, таким образом, изменяться от упомянутой первой скорости v1 до упомянутой второй скорости v2, если имеет место переключение передач во время перемещения ССУ.
При увеличении зазора между кабиной управления 3 и полуприцепом 2, в ответ на уменьшение скорости транспортного средства, блок управления 24 дает команду на перемещение ССУ 4 назад, он (блок управления) одновременно дает команду на торможение полуприцепа 2 относительно тягача 1 посредством подачи в электронный блок управления 28 тормозами запроса на торможение полуприцепа относительно тягача, чтобы таким образом способствовать перемещению ССУ назад. Торможение, выполняемое по команде блока управления 24, полуприцепа 2 относительно тягача 1 должно быть, конечно, не слишком мощным, но должно поддерживаться на таком уровне, чтобы водитель не страдал при таком торможении.
На фиг.6 изображена структурная схема, на которой проиллюстрирован вариант осуществления способа регулирования линейного положения ССУ 4 типа, описанного выше, установленного на тягаче, при движении транспортного средства, согласно настоящему изобретению. На этапе S1 непрерывно определяют заданное значение fbör и действительное значение fär линейного положения ССУ при движении тягача. На этапе S2 производят сравнение превалирующего заданного значения fbör и действительного значения fär. Если разница между заданным значением fbör и действительным значением fär превышает заданную предельную величину, то на этапе S3 определяют, должно ли ССУ 4 быть перемещено вперед или назад для понуждения к тому, чтобы действительное значение fär соответствовало заданному значению fbör. Если на этапе S3 обнаруживается, что ССУ 4 должно быть перемещено вперед к кабине управления 3 тягача, как это происходит в случае, когда скорость тягача 1 увеличивается, то на этапе S4 определяют, выполняет или не выполняет тягач переключение передач. Если на этапе S4 обнаруживается, что тягач не выполняет переключение передач, то на этапе S5 подается команда в переключающее устройство 21 на осуществление перемещения ССУ вперед с первой скоростью перемещения v1. Если на этапе S4 обнаруживается, что тягач выполняет переключение передач, то на этапе S6 подается команда в переключающее устройство 21 на осуществление перемещения ССУ вперед со второй скоростью перемещения v2, большей первой скорости перемещения v1. Во время перемещения ССУ вперед осуществляют непрерывный мониторинг за тем, заканчивается ли выполняемая операция переключения передач или начинается новая операция переключения передач, и в этом случае осуществляют изменение скорости перемещения с одной упомянутой скорости перемещения (например) v1 на другую скорость перемещения v2, в зависимости от того, начинается или заканчивается выполнение операции переключения передач. Если на этапе S3 обнаруживается, что ССУ 4 должно быть перемещено назад от кабины управления 3 тягача, как это бывает в случае, когда скорость тягача 1 замедляется, то на этапе S7 дается команда на торможение полуприцепа 2 относительно тягача 1 и команда в переключающее устройство 21 ССУ для осуществления перемещения ССУ назад.
Управляющая компьютерная программа для осуществления способа согласно изобретению представляет с успехом часть компьютерной программы, которая может быть передана в оперативную память компьютера, например оперативную память электронного блока управления тягача. Такую компьютерную программу с успехом вводят посредством компьютерной программы, содержащей среду для хранения данных, пригодную для считывания с помощью электронного блока управления и содержащую компьютерную программу, хранящуюся в ней. Упомянутой средой для хранения данных может быть, например: оптическая среда для хранения данных в виде диска CD ROM, диска DVD и т.д., магнитная среда для хранения данных в виде жесткого диска, дискеты, кассетной ленты и т.д., или флэш-память или память типа: постоянного запоминающего устройства (ПЗУ); программируемого постоянного запоминающего устройства (ППЗУ); стираемого программируемого постоянного запоминающего устройства (СППЗУ) или электрически стираемого программируемого постоянного запоминающего устройства (ЭСППЗУ).
Компьютерная программа согласно варианту осуществления изобретения содержит управляющую компьютерную программу, составленную таким образом, чтобы электронный блок управления, установленный на тягаче, снабженном ССУ, которое можно с помощью переключающего устройства выставлять в различных линейных положениях относительно кабины управления тягача, в продольном направлении тягача, для регулирования зазора между кабиной управления и полуприцепом, присоединенным к тягачу посредством ССУ, понуждать к:
- получению или определению величины, которая представляет превалирующую скорость транспортного средства;
- определению заданного значения fbör линейного положения ССУ на основании скорости транспортного средства и управлению переключающим устройством на основании заданного значения fbör; и
- управлению переключающим устройством таким образом, чтобы перемещение ССУ вперед для уменьшения зазора между кабиной управления и полуприцепом, в ответ на увеличение скорости транспортного средства, осуществлялось с помощью переключающего устройства с большей скоростью перемещения ССУ в то время, когда тягач выполняет операцию переключения передач, чем в то время, когда тягач не выполняет операцию переключения передач; и/или
- подаче команды на торможение полуприцепа относительно тягача, когда переключающее устройство должно осуществлять перемещение ССУ назад для увеличения зазора между кабиной управления и полуприцепом в ответ на уменьшение скорости транспортного средства, чтобы, таким образом, способствовать перемещению ССУ назад.
На фиг.5 схематически проиллюстрирован электронный блок управления 30, содержащий исполнительные средства 31, например центральный процессор (ЦП) для выполнения компьютерной программы. Исполнительные средства 31 связаны с памятью 32, например, типа оперативного запоминающего устройства (ОЗУ), через шину 33 данных. Блок содержит также среду 34 для хранения данных, например, в виде флэш-памяти или типа: постоянного запоминающего устройства (только для считывания) (ПЗУ), программируемого постоянного запоминающего устройства (ППЗУ), стираемого программируемого постоянного запоминающего устройства (СППЗУ) или электрически стираемого программируемого постоянного запоминающего устройства (ЭСППЗУ). Исполнительные средства 31 связаны со средой 34 для хранения данных посредством шины данных 33. Компьютерную программу, содержащую управляющую компьютерную программу для осуществления способа согласно изобретению, например, согласно варианту осуществления, показанному на фиг.5, хранят в среде 34 для хранения данных.
Изобретение, конечно, никоим образом не ограничено вариантами осуществления, описанными выше, и специалистам в данной области техники вероятно очевидно множество возможностей их модифицирования без отступления, таким образом, от основной концепции изобретения, определенной в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕДЕЛЬНО-СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 2014 |
|
RU2554717C1 |
| БОЛЬШЕГРУЗНЫЙ АВТОПОЕЗД | 2022 |
|
RU2791699C1 |
| ПОЛЗУН С ГИДРАВЛИЧЕСКИМ ЦИЛИНДРОМ | 2006 |
|
RU2409493C2 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО, СИСТЕМА ОБТЕКАТЕЛЯ, БЛОК УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ СОПРОТИВЛЕНИЯ ВОЗДУХА У АВТОПОЕЗДА | 2005 |
|
RU2379210C2 |
| АВТОПОЕЗД | 2017 |
|
RU2662617C1 |
| Автопоезд | 1989 |
|
SU1689185A1 |
| СЕДЕЛЬНЫЙ ТЯГАЧ | 2003 |
|
RU2236365C1 |
| АВТОПОЕЗД | 2017 |
|
RU2658969C1 |
| АВТОПОЕЗД | 2006 |
|
RU2314960C1 |
| СЕДЕЛЬНЫЙ АВТОПОЕЗД | 2003 |
|
RU2255874C1 |




Изобретение относится к области автопоездов и предназначено для регулирования линейного положения седельно-сцепного устройства тягача во время движения транспортного средства. Система для регулирования положения седельно-сцепного устройства (4) тягача содержит переключающее устройство, блок управления. Блок управления тягача содержит исполнительные средства, память, среду для хранения данных. При регулировании линейного положения седельно-сцепного устройства (4) перемещают седельно-сцепное устройство (4) вперед в ответ на увеличение скорости транспортного средства, для уменьшения зазора между кабиной (3) управления и полуприцепом (2) с большей скоростью в то время, когда тягач (1) выполняет переключение передач, чем в то время, когда, тягач (1) не выполняет переключение передач. Подают команду на торможение полуприцепа (2) относительно тягача (1), когда должно быть осуществлено перемещение седельно-сцепного устройства (4) назад для увеличения зазора между кабиной управления (3) и полуприцепом (2) в ответ на уменьшение скорости транспортного средства, для способствования, таким образом, перемещению седельно-сцепного устройства (4) назад. Достигается регулирование зазора между кабиной тягача и полуприцепа во время движения транспортного средства, улучшение маневренности, уменьшение потребления топлива. 4 н. и 7 з.п. ф-лы, 6 ил.
1. Способ регулирования линейного положения седельно-сцепного устройства (ССУ) (4) автопоезда (1, 2) при движении последнего, содержащего: тягач (1) с кабиной управления (3) и ССУ (4), установленное с возможностью перемещения относительно кабины управления (3) в продольном направлении тягача, которое может быть выставлено в различных линейных положениях относительно кабины управления (3) с помощью переключающего устройства (21); и
полуприцеп (2) со средством сцепления (6), присоединенный к тягачу (1) путем сопряжения средства сцепления (6) полуприцепа и ССУ (4) тягача, причем линейное положение ССУ (4) регулируется автоматически на основании скорости транспортного средства, отличающийся тем, что перемещение ССУ (4) вперед, выполняемое в ответ на увеличение скорости транспортного средства, для уменьшения зазора между кабиной управления (3) и полуприцепом (2), осуществляют с большей скоростью перемещения ССУ в то время, когда тягач (1) выполняет переключение передач, чем в то время, когда тягач (1) не выполняет переключение передач; и/или тем, что
подается команда на торможение полуприцепа (2) относительно тягача (1), когда должно быть осуществлено перемещение ССУ (4) назад для увеличения зазора между кабиной управления (3) и полуприцепом (2) в ответ на уменьшение скорости транспортного средства, для способствования, таким образом, перемещению ССУ (4) назад.
2. Способ по п.1, отличающийся тем, что линейное положение ССУ (4) регулируется бесступенчато между двумя крайними положениями на основании скорости транспортного средства.
3. Способ по п.1, отличающийся тем, что линейное положение ССУ (4) регулируется пошагово между двумя крайними положениями на основании скорости транспортного средства.
4. Система для регулирования линейного положения ССУ тягача при движении транспортного средства, содержащая:
переключающее устройство (21), с помощью которого ССУ может быть выставлено в различных линейных положениях относительно кабины управления тягача, в продольном направлении тягача, для регулирования зазора между кабиной управления и полуприцепом, присоединенным к тягачу посредством ССУ; и
электронный блок управления (24) для управления переключающим устройством (21), выполненный с возможностью определения заданного значения (fbör) линейного положения ССУ на основании скорости транспортного средства; и для управления переключающим устройством (21) на основании заданного значения (fbör), отличающаяся тем, что
блок управления (24) выполнен с возможностью управления переключающим устройством (21) таким образом на основании заданного значения (fbör), чтобы перемещение ССУ вперед для уменьшения зазора между кабиной управления и полуприцепом в ответ на увеличение скорости транспортного средства, осуществляемое с помощью переключающего устройства (21), выполнялось с большей скоростью перемещения ССУ в то время, когда тягач (1) выполняет переключение передач, чем в то время, когда тягач (1) не выполняет переключение передач; и/или тем, что блок управления (24) выполнен с возможностью одновременной подачи команды на торможение полуприцепа относительно тягача при подаче команды на перемещение ССУ назад для увеличения зазора между кабиной управления и полуприцепом, в ответ на уменьшение скорости транспортного средства, для способствования, таким образом, перемещению ССУ назад.
5. Система по п.4, отличающаяся тем, что блок управления (24) выполнен с возможностью обеспечения бесступенчатого варьирования заданного значения (fbör) в заданном диапазоне на основании скорости транспортного средства.
6. Система по п.4, отличающаяся тем, что блок управления (24) выполнен с возможностью обеспечения пошагового варьирования заданного значения (fbör) в заданном диапазоне на основании скорости транспортного средства.
7. Система по любому из пп.4-6, отличающаяся тем, что блок управления (24) выполнен с возможностью получения от электронного блока управления тягача информации, которая указывает на то, когда тягач начинает и заканчивает операцию переключения передач.
8. Система по п.4, отличающаяся тем, что блок управления (24) выполнен с возможностью подачи в электронный блок управления тормозами запроса на торможение полуприцепа относительно тягача, когда, в ответ на уменьшение скорости транспортного средства, блок управления подает команду на перемещение ССУ назад для увеличения зазора между кабиной управления и полуприцепом.
9. Способ регулирования зазора между кабиной управления и полуприцепом, присоединенным к тягачу посредством седельно-сцепного устройства (ССУ), отличающийся тем, что:
получают или определяют величину, которая представляет превалирующую скорость транспортного средства;
определяют заданное значение (fbör) линейного положения ССУ на основании скорости транспортного средства и управляют переключающим устройством на основании заданного значения (fbör) и,
управляют переключающим устройством таким образом, чтобы перемещение ССУ вперед для уменьшения зазора между кабиной управления и полуприцепом, в ответ на увеличение скорости транспортного средства, осуществлялось с помощью переключающего устройства с большей скоростью перемещения ССУ в то время, когда тягач выполняет операцию переключения передач, чем в то время, когда тягач не выполняет операцию переключения передач; и/или
подают команду на торможение полуприцепа относительно тягача, когда переключающее устройство должно осуществлять перемещение ССУ назад для увеличения зазора между кабиной управления и полуприцепом, в ответ на уменьшение скорости транспортного средства, чтобы таким образом способствовать перемещению ССУ назад.
10. Электронный блок управления тягача, отличающийся тем, что он содержит исполнительные средства (31), память (32), соединенную с исполнительными средствами, и среду (34) для хранения данных, соединенную с исполнительными средствами, при этом среда для хранения данных содержит компьютерную программу, составленную таким образом, чтобы электронный блок управления, установленный на тягаче, снабженном ССУ, которое можно с помощью переключающего устройства выставлять в различных линейных положениях относительно кабины управления тягачом, в продольном направлении тягача, для регулирования зазора между кабиной управления и полуприцепом, присоединенным к тягачу посредством ССУ, понуждать к:
получению или определению величины, которая представляет превалирующую скорость транспортного средства;
определению заданного значения (fbör) линейного положения ССУ на основании скорости транспортного средства и управлению переключающим устройством на основании заданного значения (fbör); и
управлению переключающим устройством таким образом, чтобы перемещение ССУ вперед для уменьшения зазора между кабиной управления и полуприцепом, в ответ на увеличение скорости транспортного средства, осуществлялось с помощью переключающего устройства с большей скоростью перемещения ССУ в то время, когда тягач выполняет операцию переключения передач, чем в то время, когда тягач не выполняет операцию переключения передач; и/или подаче команды на торможение полуприцепа относительно тягача, когда переключающее устройство должно осуществлять перемещение ССУ назад для увеличения зазора между кабиной управления и полуприцепом, в ответ на уменьшение скорости транспортного средства, чтобы таким образом способствовать перемещению ССУ назад.
11. Электронный блок управления по п.10, отличающийся тем, что среда для хранения данных выбрана из группы, состоящей из диска CD ROM, диска DVD, жесткого диска, дискеты, кассетной ленты, флеш-памяти, постоянного запоминающего устройства (ПЗУ), программируемого постоянного запоминающего устройства (ППЗУ), стираемого программируемого постоянного запоминающего устройства (СППЗУ) и электрически стираемого программируемого постоянного запоминающего устройства (ЭСППЗУ).
| WO 2007068762 A1, 21.06.2007 | |||
| WO 2007075165 A2, 05.07.2007 | |||
| WO 2007050019 A1, 03.05.2007 | |||
| Автопоезд | 1989 |
|
SU1654101A1 |

