Изобретение касается регулирующего устройства для седельно-сцепного устройства согласно ограничительной части пункта 1 формулы изобретения. Изобретение относится также к системе обтекателя, которая расположена на кабине водителя седельного тягача, а также к блоку управления для тягача с седельно-сцепным устройством. Далее, изобретение направлено на устройство для уменьшения сопротивления воздуха автопоезду.
Устройства сдвига известны, например, из DE-AS 1780488, ЕР 0503954 A1 или DE 19944684 C1.
Далее, из WO 02/070328 A1 известно устройство смещения, которое имеет две направляющие с зубчатыми рейками, на которых подвижно расположены салазки, которые несут седельно-сцепное устройство. На салазках расположено стопорное устройство с блокировочными деталями, которые входят в зацепление с зубчатыми рейками.
Кроме горизонтального смещения седельно-сцепного устройства, также можно проводить приподнимание и опускание седельно-сцепного устройства, так как полуприцепы могут иметь разную высоту, так что нужно осуществлять соответствующее согласование. Для этих целей имеются подъемные устройства, которые описываются, например, в DE 198929 A1 или DE 19839357 A1.
Так как седельно-сцепное устройство должно воспринимать очень большие усилия не только в вертикальном направлении, но и в направлении движения, а также большие боковые усилия, требуется высокая стабильность подъемного устройства относительно рамы транспортного средства во всех направлениях, а именно как в опущенном, так и в приподнятом состоянии. Поэтому подъемное устройство согласно DE 19839357 A1 содержит опорную плиту, на которой шарнирно закреплены рычаги с возможностью отклонения вокруг горизонтальной оси. На другом конце рычагов закреплено седельно-сцепное устройство, а также установочные рычаги. Между установочными рычагами и шарнирно закрепленными рычагами расположены гидроцилиндры, чтобы приподнимать или соответственно опускать подъемное устройство. Это подъемное устройство хотя и может управляться на расстоянии, однако водитель должен проверять соответствующую высоту подъема на месте.
Известные до сих пор механизмы смещения и подъема рассчитаны на то, чтобы осуществлять согласование тягача и полуприцепа до начала движения. Однако оказалось, что зазор или промежуток, который возникает между передней частью кузова полуприцепа и кабиной водителя тягача, во время поездки приводит к аэродинамическим завихрениям, которые влияют на сопротивление воздуха и, таким образом, на расход топлива автопоезда.
Чтобы противодействовать этому эффекту, часто используются обтекатели для целенаправленного прохождения воздуха над зазором. Они тяжелы, дороги и установлены неподвижно. Перенастройка должна проводиться вручную, что, как правило, возможно только из промежутка.
Принципиально, имеет смысл выполнять этот зазор или промежуток таким малым, насколько возможно. С другой стороны, слишком маленький промежуток мог бы привести к тому, что при повороте углы полуприцепа ударялись бы в заднюю стенку кабины водителя.
Также могут иметься ситуации, при которых имеет смысл допускать большой промежуток, чтобы создавать, например, место для агрегатов или улучшать на стоянках удобство доступа к питающим линиям для полуприцепа.
С помощью известных механизмов смещения, правда, возможно перемещение полуприцепа, однако водитель должен размыкать механику механизма смещения, затем изменять величину промежутка посредством перемещения тягача, снова запирать механику и убедиться в ее правильном состоянии блокировки. Этот процесс требует определенных навыков и может привести к повышенной физической нагрузке на водителей. Кроме того, это всегда возможно только при стоянке транспортного средства, но не во время езды.
Поэтому задачей изобретения является предоставление устройства, а также блока управления, с помощью которых даже во время движения можно изменять позицию полуприцепа относительно тягача, в частности уменьшать сопротивление воздуха автопоезду при высоких скоростях.
Задача, согласно первой альтернативе, решается с помощью регулирующего устройства, в котором исполнительный механизм для смещения салазок содержит первое моторное приводное устройство и в котором предусмотрен, по меньшей мере, один первый позиционный датчик для распознавания позиции салазок, причем по меньшей мере первый позиционный датчик присоединяется к управляющему устройству.
Вследствие сохранения геометрического замыкания механика механизма смещения не размыкается, так что салазки даже во время движения являются зафиксированными. Таким образом, полуприцеп не может неконтролируемо смещаться по отношению к тягачу и наносить повреждения.
За счет моторного приводного устройства впервые становится возможным изменять позицию седельно-сцепного устройства даже во время движения. Размер промежутка, т.е. величины промежуточного пространства между кабиной водителя и полуприцепом, можно индивидуально подгонять в зависимости от дорожной ситуации, так что при медленном движении, например, при маневровых работах или на стоянке промежуток большой, а при быстром движении по автостраде - маленький. Завихрения в промежуточном пространстве между кабиной водителя и передней частью полуприцепа можно сокращать, в частности, при быстрой езде, так что сопротивление воздуха автопоезду в целом уменьшается.
Посредством позиционных датчиков водителю сообщается, в частности, во время движения, где находится седельно-сцепное устройство и как далеко может смещаться механизм смещения и, таким образом, седельно-сцепное устройство, причем смещение седельно-сцепного устройства возможно за счет управляющих сигналов водителя или также может происходить автоматически. В последнем случае предварительно заданные для этого значения для соответствующей дорожной ситуации могут быть сохранены в управляющем устройстве.
Поэтому управляющее устройство преимущественно также электрически связано с первым приводным устройством.
Управляющее устройство предпочтительно включает в себя устройство индикации, которое может быть выполнено как оптический и/или акустический индикатор и размещено преимущественно в кабине водителя. Устройство индикации может быть постоянно активно, т.е. позиция седельно-сцепного устройства показывается непрерывно. Также может быть предусмотрена связь с системой зажигания транспортного средства, так что при включении зажигания показывается актуальное положение седельно-сцепного устройства и соответственно салазок.
Приводные устройства, которые обеспечивают необходимое геометрическое замыкание, являются преимущественно такими, которые имеют, по меньшей мере, один приводной шпиндель с ходовой гайкой или, по меньшей мере, одну зубчатую рейку и зубчатое колесо. Также приводные устройства, которые работают посредством цилиндровых двигателей, отвечают этим требованиям и могут использоваться как моторные приводные устройства.
В случае приводного устройства с приводным шпинделем ходовая гайка шпинделя расположена преимущественно на салазках.
Положение и вид позиционного датчика зависят от соответствующего конструктивного выполнения регулирующего устройства.
Первый позиционный датчик может быть, например, датчиком расстояния. Первый позиционный датчик может быть также измерителем угла поворота, если используется, например, приводной двигатель с приводным шпинделем.
Также можно размещать, по меньшей мере, два первых позиционных датчика на одной направляющей. Предпочтительно первые позиционные датчики являются в этом случае индуктивными датчиками.
Разная монтажная высота кабины водителя и полуприцепа также негативно влияет на сопротивление воздуха автопоезду. Поэтому предпочтительно, если седельно-сцепное устройство выполнено с возможностью смещения не только по горизонтали, но может и опускаться, и соответственно приподниматься. Полуприцеп может в зависимости от конструкции опускаться во время движения до тех пор, пока он не скроется за кабиной водителя, так что сопротивление воздуха определяется, по существу, только тягачом.
Для этого регулирующее устройство кроме механизма смещения преимущественно также содержит механизм подъема.
Механизм подъема расположен предпочтительно на салазках механизма смещения. Седельно-сцепное устройство укреплено в этом случае на подъемном механизме.
Также можно позиционировать механизм подъема на тягаче и механизм смещения располагать на механизме подъема. В этом случае направляющие механизма смещения расположены на механизме подъема, и седельно-сцепное устройство закреплено на механизме смещения.
Механизм подъема предпочтительно также имеет собственное второе моторное приводное устройство, которое также обеспечивает сохранение геометрического замыкания при подъеме и опускании.
Чтобы механизм подъема также мог приводиться в действие водителем или автоматически, второе приводное устройство также присоединяется к управляющему устройству.
Механизм подъема также имеет, по меньшей мере, один второй позиционный датчик, который регистрирует высоту подъема и присоединен к управляющему устройству.
Предпочтительно управляющее устройство включает в себя контрольное устройство, которое, предпочтительно, проверяет пригодность к эксплуатации одного или нескольких позиционных датчиков и, при необходимости, других электронных узлов.
Не во всех случаях полуприцеп из-за его монтажной высоты можно опускать позади кабины водителя, так что предпочтительно размещать на крыше кабины водителя, по меньшей мере, один обтекатель. Такие обтекатели уже известны и содержат в большинстве случаев изогнутую отклоняющую панель.
Соответствующая изобретению система обтекателя, по меньшей мере, с одним обтекателем для крыши кабины транспортного тягача автопоезда характеризуется тем, что обтекатель расположен на крыше с возможностью поворота (откидывания) и имеет третье моторное приводное устройство, причем предусмотрен, по меньшей мере, один третий позиционный датчик, который присоединен к управляющему устройству и регистрирует установочный угол обтекателя.
Выгодно, если третье приводное устройство также присоединено к управляющему устройству, чтобы обтекатель также мог управляться на расстоянии и мог либо регулироваться водителем посредством управляющих команд, либо поворачиваться автоматически с учетом позиционных сигналов одного или нескольких позиционных датчиков.
Обтекатель на крыше кабины водителя выполнен с возможностью поворота вокруг горизонтальной оси. Система обтекателя также может иметь расположенные по бокам кабины водителя обтекатели, которые могут поворачиваться вокруг вертикальной оси. Эти боковые обтекатели также могут иметь четвертое приводное устройство и, по меньшей мере, один четвертый позиционный датчик, который присоединен к управляющему устройству.
Управляющее устройство системы обтекателя может быть отдельным управляющим устройством. Однако также можно один или несколько третьих и/или четвертых позиционных датчиков, и/или третье и/или четвертое приводное устройство присоединить к управляющему устройству регулирующего устройства.
Соответствующий изобретению блок управления для тягача с седельно-сцепным устройством предусматривает управляющее устройство, а также, по меньшей мере, один позиционный датчик, который расположен в механизме смещения и/или в механизме подъема седельно-сцепного устройства и/или в выполненной с возможностью поворота системе обтекателя на кабине тягача, причем управляющее устройство электрически связано, по меньшей мере, с одним позиционным датчиком и с приводным устройством механизма смещения и/или механизма подъема седельно-сцепного устройства и/или системы обтекателя.
Управляющее устройство предпочтительно включает в себя также контрольное устройство, которое предпочтительно проверяет пригодность к эксплуатации одного или нескольких датчиков и, при необходимости, других электронных узлов. Вследствие этого повышается безопасность относительно регулирования обтекателя и/или седельно-сцепного устройства. Контрольное устройство может быть, например, также выполнено так, что регулирование обтекателя, механизма смещения и/или механизма подъема возможно только тогда, когда гарантирована пригодность к эксплуатации, по меньшей мере, всех позиционных датчиков.
Кроме того, блок управления характеризуется тем, что включает в себя устройство индикации, которое показывает горизонтальную и/или вертикальную позицию седельно-сцепного устройства и/или наклон системы обтекателя. Это устройство индикации предпочтительно расположено в кабине водителя, чтобы водитель был проинформирован о соответствующей позиции отдельных компонентов.
Управляющее устройство дополнительно может присоединяться к регулируемому устройству подвески полуприцепа, так что тогда, когда производится вертикальное регулирование седельно-сцепного устройства, также может производиться согласование по высоте в области шасси.
Управляющее устройство предпочтительно предназначено для анализа позиционных сигналов от позиционных датчиков, причем после сравнения с номинальными значениями выдаются управляющие сигналы в приводные устройства. Вследствие этого становится возможным автоматический режим, в который не должен вмешиваться водитель. Номинальные значения могут быть привязаны, например, к скорости движения, так что при быстром движении по скоростной автомобильной магистрали - на основе номинального значения для величины промежутка - седельно-сцепное устройство смещается вперед посредством регулирующего устройства настолько, что промежуток минимизируется. Также посредством управляющего устройства может автоматически оптимизироваться наклон обтекателя, и, если это допускает конструкция, посредством механизма подъема также может соответствующим образом опускаться полуприцеп.
Управляющее устройство согласно другому варианту осуществления также может иметь контур регулирования. Согласно характеристическим кривым, например, в зависимости от дорожных условий, функционирует регулирующее устройство.
Соответствующее изобретению устройство согласно второй альтернативе представляет собой устройство для уменьшения сопротивления воздуха автопоезду из тягача и полуприцепа, которое предусматривает механизм смещения для смещения седельно-сцепного устройства в продольном направлении тягача, и/или механизм подъема для приподнимания или опускания седельно-сцепного устройства, и/или систему обтекателя, расположенную на кабине водителя с возможностью поворота, причем механизм смещения, и/или механизм подъема, и/или система обтекателя имеют моторные приводы и позиционные датчики, причем приводные устройства и позиционные датчики присоединены к общему управляющему устройству.
Далее, примерные варианты осуществления изобретения поясняются более подробно посредством чертежей, на которых:
фиг.1, 2a, 2b и 3 - вид сбоку автопоезда с разными позициями полуприцепа,
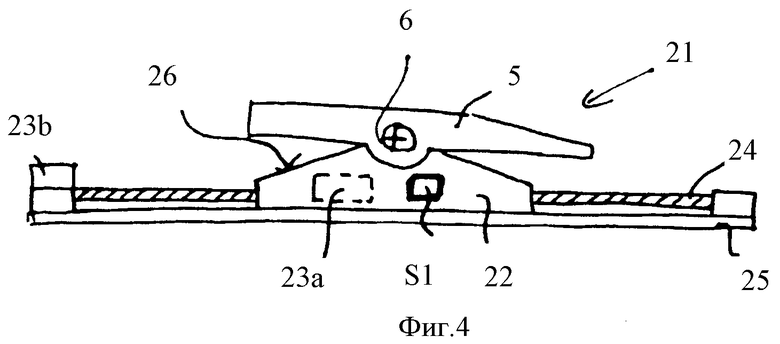
фиг.4 - вид сбоку механизма смещения,
фиг.5 - вид сверху механизма смещения,
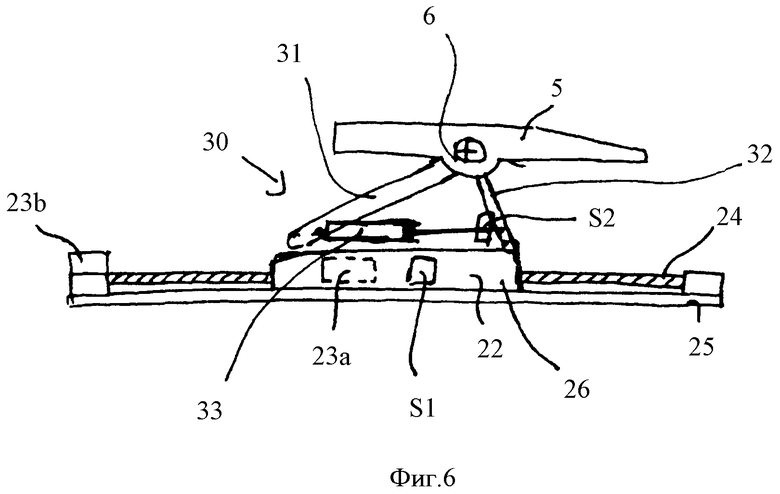
фиг.6 - вид сбоку регулирующего устройства с механизмом смещения и механизмом подъема,
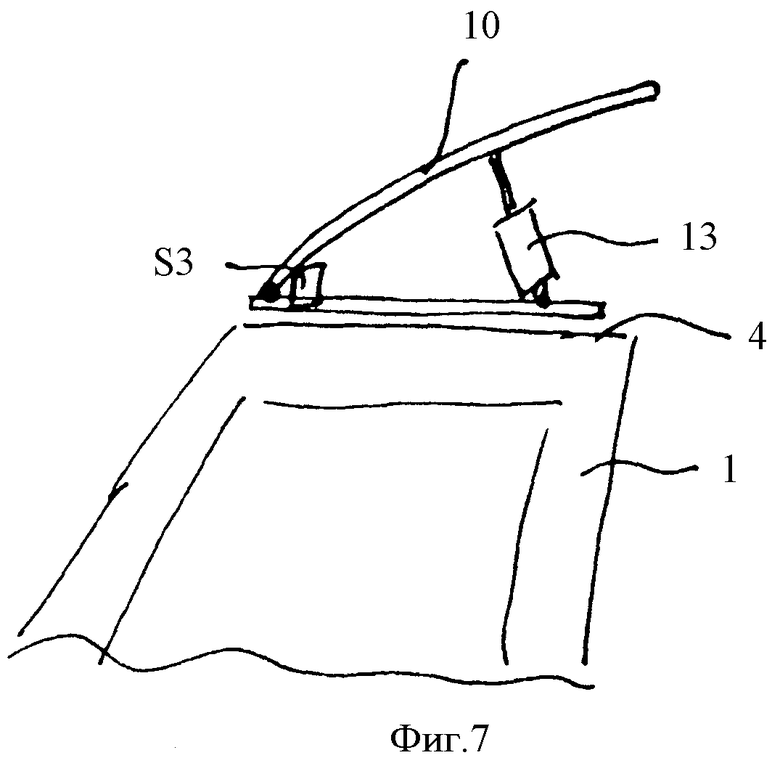
фиг.7 - вид сбоку обтекателя,
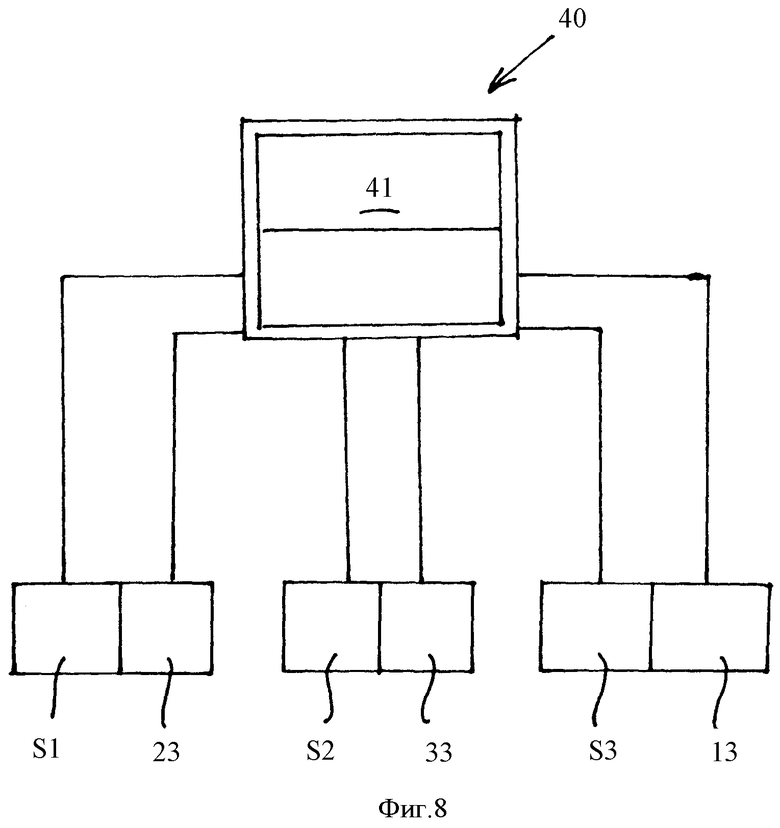
фиг.8 - блок-схема блока управления,
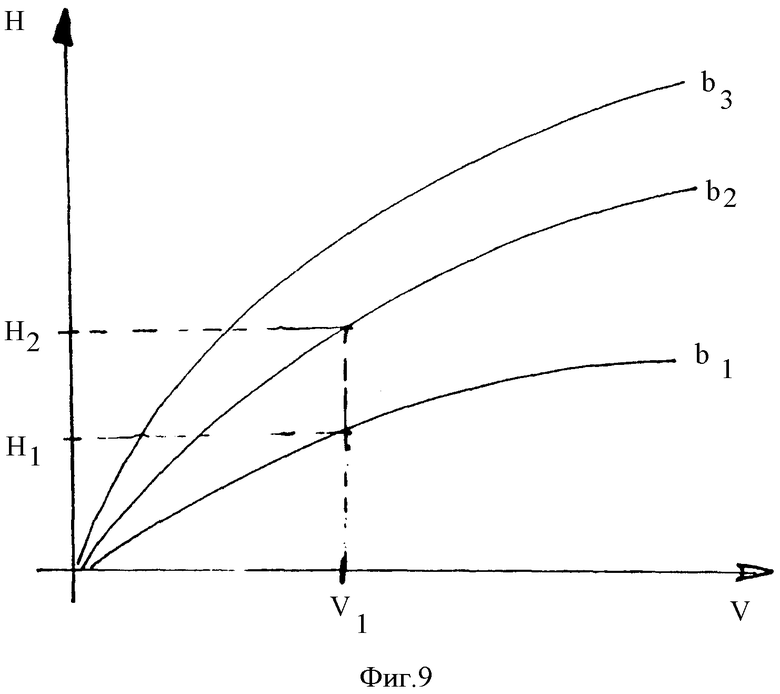
фиг.9 - примерная диаграмма характеристических кривых.
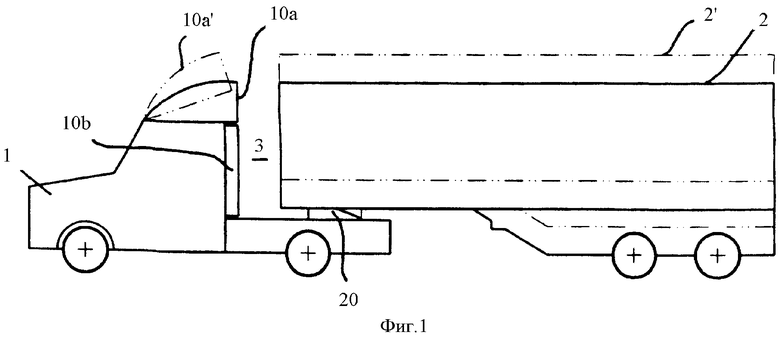
На фиг.1-3 представлен автопоезд, соответственно состоящий из тягача 1 и полуприцепа 2 в различных позициях. Тягач 1 имеет регулирующее устройство 20 с расположенным на нем седельно-сцепным устройством, в которое входит шкворень полуприцепа 2. На фиг.1-3 не показано седельно-сцепное устройство, а регулирующее устройство представлено только схематически. Далее, тягач 1 на крыше 4 имеет поворотный обтекатель 10a, а также боковые обтекатели 10b на кабине водителя.
На фиг.1 полуприцеп 2' находится в приподнятой позиции. Обтекатель 10a' находится в повернутой вверх позиции. Чтобы уменьшать сопротивление воздуха, полуприцеп может опускаться в позицию 2, в то время как регулирующее устройство 20, а также шасси полуприцепа опускаются. Опускание шасси происходит преимущественно с помощью регулируемой подвески, в частности пневматической подвески полуприцепа, которая присоединяется с этой целью к управляющему устройству регулирующего устройства 20.
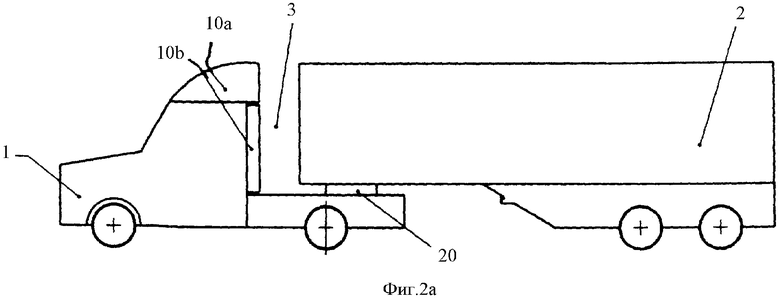
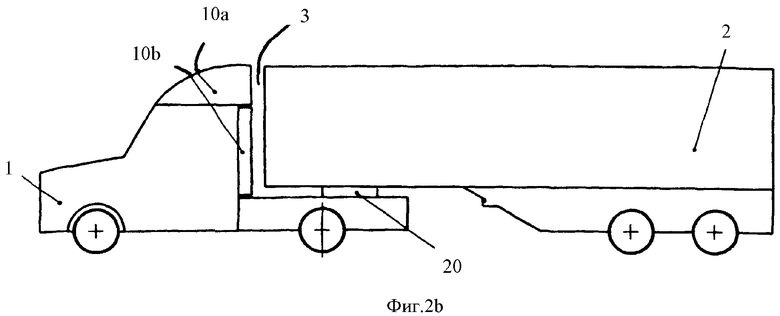
На фиг.2a полуприцеп 2 находится в опущенной позиции, так что верхний край полуприцепа находится на том же уровне, что и вершина обтекателя 10a, который находится также в опущенной позиции. При этом расположении промежуток 3 между кабиной водителя 1 и передней стороной полуприцепа 2 является относительно большим, так что в нем при быстром движении по автостраде возникают завихрения, которые тормозят транспортное средство. Чтобы устранить это, можно посредством регулирующего устройства 20 сместить седельно-сцепное устройство влево, так что промежуток 3 станет соответственно меньше, как это представлено на фиг.2b.
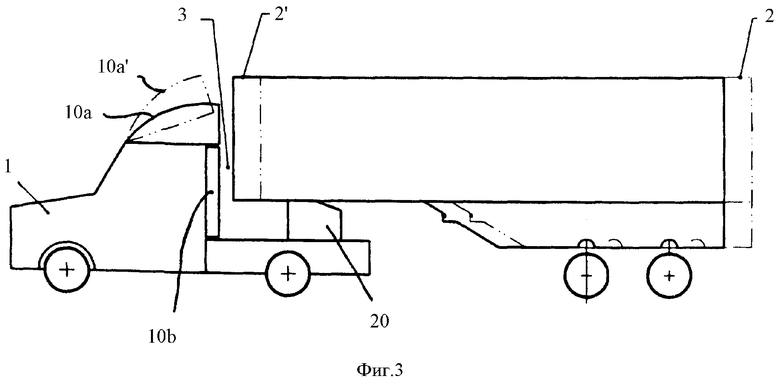
На фиг.3 представлена приподнятая позиция полуприцепа 2/2' с маленьким и большим промежутком 3. Эта приподнятая позиция целесообразна при неровной поверхности или для экстремального маневрирования.
Все показанные изменения позиции могут осуществляться во время движения.
На фиг.4 схематически представлен вид сбоку механизма 21 смещения. На раме 25, которая смонтирована на тягаче, установлены с возможностью смещения салазки 26. Для этого на раме 25 расположены направляющие 27, как это представлено на фиг.5. На салазках 26 закреплены кронштейны 6 подшипников для приема седельно-сцепного устройства 5.
Эти салазки 26 приводятся в действие приводным шпинделем 24 и моторным приводом 23a или 23b, причем приводной шпиндель 24 воздействует на ходовую гайку 22 на салазках 26, которая на фиг.5 прикрыта. Таким образом, моторный привод 23a может быть расположен на салазках 26 или же - как моторный привод 23b - на поперечине 28 рамы 25, как это показано на фиг.5. Приводной шпиндель 24 установлен на поперечине 29 рамы 25 с возможностью вращения. Во время регулирования (перемещения) салазок 26 сохраняется геометрическое замыкание между ходовой гайкой 22 и приводным шпинделем 24, так что регулирование возможно даже во время движения.
Далее, на салазках 26 расположен первый позиционный датчик S1, который взаимодействует, например, как индуктивный датчик с соответствующими сопряженными деталями, например, на направляющей 27 и таким образом регистрирует позицию салазок 26 на раме 25 и соответственно относительно направляющей 27. Этот первый позиционный датчик S1 присоединен к не представленному на фиг.4 и 5 управляющему устройству. Это относится также к моторному приводному устройству 23a и соответственно 23b, которое также электрически присоединено к управляющему устройству.
На фиг.6 представлен другой вариант осуществления, в котором на механизме 21 смещения расположен механизм 30 подъема, который содержит пару рычагов 31 и соответственно пару установочных рычагов 32, причем в общем шарнирном центре установочного рычага 32 и рычага 31 закреплено седельно-сцепное устройство 5 в соответствующем кронштейне 6 подшипника. Для поднимания и опускания механизма 30 подъема предусмотрено второе моторное приводное устройство 33 в форме цилиндра с рабочей средой. Этот цилиндр также обеспечивает условие геометрического замыкания при подъеме и опускании седельно-сцепного устройства.
Механизм 30 подъема имеет второй позиционный датчик S2, который регистрирует высоту подъема, например, посредством угла поворота установочного рычага 32. Моторное приводное устройство 33 так же, как и позиционный датчик S2, присоединяется к не представленному на фиг.6 управляющему устройству.
На фиг.7 представлен регулируемый обтекатель 10 на крыше 4 тягача 1. Регулирование обтекателя 10 происходит посредством третьего моторного приводного устройства в форме цилиндра 13 с рабочей средой. С помощью третьего позиционного датчика S3 регистрируется наклон обтекателя 10. Третий позиционный датчик S3 и третье моторное приводное устройство 13 также присоединены к управляющему устройству.
На фиг.8 представлена блок-схема блока управления. Позиционные датчики S1, S2 и S3, а также соответствующие приводные устройства 23, 33 и 13 присоединены к управляющему устройству 40, которое имеет устройство 41 индикации. В расширенном варианте также могут быть приобщены боковые обтекатели с их приводными устройствами и позиционными датчиками S4, а также устройство подвески полуприцепа. Блок управления размещен предпочтительно в кабине водителя, так что водитель может считывать всю информацию с устройства 41 индикации даже во время движения и при необходимости может осуществлять через управляющее устройство 40 также смещение седельно-сцепного устройства и/или системы обтекателя. Также блок управления может иметь соответствующие контуры регулирования, так что регулирование приводных устройств 13, 23 и 33 может происходить автоматически в зависимости от дорожной ситуации.
На фиг.9 представлена примерная диаграмма характеристических кривых, на которой нанесена скорость V по отношению к высоте H подъема для различных величин промежутка b1, b2, b3 (ширина промежутка 3). При скорости V1 управляющим устройством 40 на устройстве 20 подъема устанавливается высота подъема H1 для ширины b1. Если, тем не менее, при скорости V1 ширина b1 и высота H1 вследствие дорожных условий не будут практичны, то водитель или автоматически управляющее устройство может переключаться на другую кривую, например для b2, с тем результатом, что регулирующее устройство переместится как в горизонтальном направлении, так и в вертикальном направлении. При изменении скорости V подгонка соответственно происходит вдоль характеристической кривой b2.
Перечень ссылочных позиций
1 тягач
2, 2' полуприцеп
3 промежуток
4 крыша
5 седельно-сцепное устройство
6 кронштейн подшипника
10а, 10а', 10b обтекатель
13 третье приводное устройство
20 регулирующее устройство
21 механизм смещения
22 ходовая гайка
23а, b первое приводное устройство
24 приводной шпиндель
25 рама
26 салазки
27 направляющая
28 поперечина
29 поперечина
30 механизм подъема
31 рычаг
32 установочный рычаг
33 второе приводное устройство
40 управляющее устройство
41 устройство индикации
S1 первый позиционный датчик
S2 второй позиционный датчик
S3 третий позиционный датчик
S4 четвертый позиционный датчик
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ЛИНЕЙНОГО ПОЛОЖЕНИЯ СЕДЕЛЬНО-СЦЕПНОГО УСТРОЙСТВА | 2009 |
|
RU2483963C2 |
| ПОЛЗУН С ГИДРАВЛИЧЕСКИМ ЦИЛИНДРОМ | 2006 |
|
RU2409493C2 |
| БОЛЬШЕГРУЗНЫЙ АВТОПОЕЗД | 2022 |
|
RU2791699C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ СЦЕПНОГО УСТРОЙСТВА ДЛЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2009 |
|
RU2467896C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ СОСТОЯНИЯ КОНТАКТИРОВАНИЯ ШТЕПСЕЛЕЙ | 2009 |
|
RU2498910C2 |
| СИСТЕМА СОЕДИНЕНИЯ МАГИСТРАЛЕЙ ПИТАНИЯ | 2005 |
|
RU2376155C2 |
| Автопоезд | 1989 |
|
SU1689185A1 |
| Устройство для управления колесами полуприцепа | 1979 |
|
SU872366A1 |
| АВТОПОЕЗД | 1997 |
|
RU2131369C1 |
| АВТОПОЕЗД | 2017 |
|
RU2662617C1 |
Изобретение относится к области машиностроения, более конкретно к регулирующему устройству для седельно-сцепного устройства. Регулирующее устройство (5) с механизмом (21) смещения содержит две расположенные на седельном тягаче (1) в его продольном направлении направляющие (27). Также устройство содержит салазки (26), выполненные с возможностью смещения в направляющих (27), и исполнительное устройство для смещения салазок. Исполнительное устройство образовано с сохранением геометрического замыкания между направляющими (27) и салазками (26) при смещении. При этом исполнительное устройство для смещения салазок содержит моторное приводное устройство (23а, b). Также предусмотрен позиционный датчик для распознавания позиции салазок, причем позиционный датчик (S1) присоединен к управляющему устройству (40). Возможно использование устройства для уменьшения сопротивления воздуха, содержащего обтекатель (10а, 10b) на кабине водителя тягача (1). Причем обтекатель выполнен с возможностью поворота. Технический результат заключается в обеспечении возможности регулировки расстояния между тягачом и полуприцепом во время движения, а также в уменьшении сопротивления воздуха автопоезду на высоких скоростях. 3 н. и 18 з.п. ф-лы, 10 ил.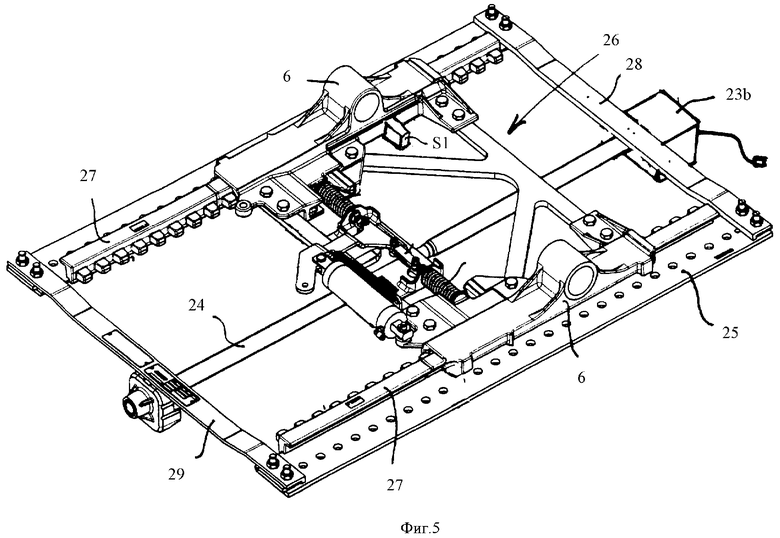
1. Регулирующее устройство для седельно-сцепного устройства (5) с механизмом (21) смещения с двумя расположенными на транспортном средстве, в частности, на седельном тягаче (1), в его продольном направлении направляющими (27), выполненными с возможностью смещения в направляющих (27) салазками (26) и с исполнительным устройством для смещения салазок (26), которое выполнено с сохранением геометрического замыкания между рамой (25) и салазками (26) при смещении, отличающееся тем, что исполнительное устройство для смещения салазок (26) включает в себя первое моторное приводное устройство (23а, b) и что предусмотрен, по меньшей мере, один первый позиционный датчик (S1) для распознавания позиции салазок, причем, по меньшей мере, этот первый позиционный датчик (S1) и первое моторное приводное устройство (23а, b) присоединены к управляющему устройству (40).
2. Устройство по п.1, отличающееся тем, что первое моторное приводное устройство (23а, b) содержит, по меньшей мере, один приводной шпиндель (24) с ходовой гайкой (22).
3. Устройство по п.2, отличающееся тем, что ходовая гайка (22) расположена на салазках (26).
4. Устройство по п.1, отличающееся тем, что первое моторное приводное устройство (23а, b) содержит, по меньшей мере, одну зубчатую рейку и одно зубчатое колесо.
5. Устройство по п.1, отличающееся тем, что первый позиционный датчик (S1) представляет собой датчик расстояния или измеритель угла поворота.
6. Устройство по п.1, отличающееся тем, что на направляющей (27) расположены, по меньшей мере, два первых позиционных датчика (S1).
7. Устройство по п.1, отличающееся тем, что первые позиционные датчики (S1) представляют собой индуктивные датчики.
8. Устройство по п.1, отличающееся тем, что на салазках (26) расположен механизм (30) подъема для седельно-сцепного устройства (5), причем механизм (30) подъема имеет собственное, второе моторное приводное устройство (33), и второе моторное приводное устройство присоединено к управляющему устройству (40).
9. Устройство по п.1, отличающееся тем, что направляющие (27) закреплены на механизме (30) подъема, причем механизм (30) подъема имеет собственное, второе моторное приводное устройство (33), и второе моторное приводное устройство (33) присоединено к управляющему устройству (40).
10. Устройство по п.8 или 9, отличающееся тем, что в механизме (30) подъема расположен, по меньшей мере, один второй позиционный датчик (S2), который регистрирует высоту подъема и присоединен к управляющему устройству (40).
11. Устройство по п.1, отличающееся тем, что управляющее устройство (40) включает в себя контрольное устройство.
12. Устройство по п.1, отличающееся тем, что снабжено, по меньшей мере, одним обтекателем (10а) для крыши кабины водителя тягача автопоезда, причем обтекатель (10а) расположен на крыше (4) с возможностью поворота и имеет третье моторное приводное устройство (13), и предусмотрен, по меньшей мере, один третий позиционный датчик (S3), который регистрирует угол установки обтекателя (10), причем позиционный датчик (S3) и третье моторное приводное устройство (13) присоединены к управляющему устройству (40).
13. Устройство по п.12, отличающееся тем, что предусмотрен, по меньшей мере, один обтекатель (10b), который расположен сбоку на кабине водителя тягача с возможностью поворота и имеет четвертое приводное устройство, причем предусмотрен, по меньшей мере, один четвертый позиционный датчик (S4), который присоединен к управляющему устройству (40).
14. Устройство по п.12 или 13, отличающееся тем, что управляющее устройство (40) включает в себя контрольное устройство.
15. Блок управления для тягача с седельно-сцепным устройством с управляющим устройством (40), по меньшей мере, с одним позиционным датчиком (S1, S2, S3 или S4), который расположен в механизме (21) смещения и/или механизме (30) подъема седельно-сцепного устройства (5) и/или на поворотном обтекателе (10а, 10b) на кабине водителя тягача (1), причем управляющее устройство (40) электрически связано, по меньшей мере, с одним позиционным датчиком (S1, S2, S3 или S4) и, по меньшей мере, с одним приводным устройством (13, 23a, b, 33) механизма (21) смещения и/или механизма (30) подъема седельно-сцепного устройства и/или обтекателя (10а, 10b).
16. Блок управления по п.15, отличающийся тем, что управляющее устройство (40) включает в себя контрольное устройство, которое проверяет пригодность к эксплуатации, по меньшей мере, одного или нескольких позиционных датчиков (S1, S2, S3, S4).
17. Блок управления по п.15 или 16, отличающийся тем, что он включает в себя устройство (41) индикации, которое показывает горизонтальную и/или вертикальную позицию седельно-сцепного устройства (5) и/или наклон обтекателя (10а, 10b).
18. Блок управления по п.15, отличающийся тем, что управляющее устройство (40) связано с регулируемой подвеской полуприцепа (2).
19. Блок управления по п.15, отличающийся тем, что управляющее устройство (40) выполнено с возможностью анализа позиционных сигналов позиционных датчиков (S1, S2, S3, S4) и, после сравнения их с номинальными значениями, выдачи управляющих сигналов на приводные устройства(13, 23а, b, 33).
20. Блок управления по п.15, отличающийся тем, что управляющее устройство (40) имеет контур регулирования.
21. Устройство для уменьшения сопротивления воздуха автопоезду из тягача (1) и полуприцепа (2) с механизмом (21) смещения для смещения седельно-сцепного устройства (5) в продольном направлении тягача (1) и/или механизмом (30) подъема для приподнимания или опускания седельно-сцепного устройства (5), по меньшей мере, с одним обтекателем (10а, 10b), расположенным с возможностью поворота на кабине водителя тягача (1), причем механизм (21) смещения и/или механизм (30) подъема и/или обтекатель (10а, 10b) имеют моторные приводные устройства (13, 23а, b, 33) и позиционные датчики (S1, S2, S3, S4), причем приводные устройства (13, 23а, b, 33) и позиционные датчики (S1, S2, S3, S4) присоединены к общему управляющему устройству (40).
| JP 2004139272 A, 13.05.2004 | |||
| US 5915713 A, 29.06.1999 | |||
| АВТОПОЕЗД | 2002 |
|
RU2214338C1 |
| АВТОПОЕЗД | 2000 |
|
RU2175927C2 |
| Адсорбент для двуокиси углерода | 1981 |
|
SU1031497A1 |
| БОЕВАЯ БРОНЕМАШИНА | 2015 |
|
RU2625472C2 |

