Изобретение относится к авиационным системам и может быть использовано в светосигнальном оборудовании аэродромов и посадочных площадок авианесущих кораблей для визуализации траектории снижения, обеспечивающей пилоту конкретного типа ЛА возможность пересечения порога ВПП на расчетной (заданной) высоте и касания шасси самолета посадочной полосы или захвата тормозным крюком ЛА троса аэрофинишера в заданной точке (например, одной точке для всех типов ЛА).
Известна оптическая система [1] (Павленко В.Ф. Корабельные самолеты. - М.: Воениздат, 1990. - Стр. 259-261) для точной посадки самолетов на палубу корабля, которая состоит из установленных сбоку от ВПП светосигнальных индикаторов различного цвета и диаграммы направленности, по светосигнальной информации от которых пилот определяет положение ЛА относительно заданной траектории снижения. Для выполнения посадки ЛА, имеющих отличия по высоте расположения кабины пилотов относительно шасси, в системе имеется устройство для поворота светосигнальных индикаторов в плоскости поперечной траектории снижения. При повороте светосигнальных индикаторов сохраняется заданный угол индикации траектории снижения ЛА и происходит смещение высоты световых зон - индикаторов глиссады снижения ЛА, что позволяет пилоту осуществлять посадку ЛА, имеющих отличия по высоте расположения кабины пилотов относительно тормозного крюка или нижней точки шасси и обеспечить, при этом захват тормозным крюком ЛА троса аэрофинишера.
Недостатком оптической системы [1] является наличие эффекта снижения точности посадки самолетов на палубу корабля из-за изменения индикации высоты пересечения порога ВПП в случае смещения ЛА относительно курса в процессе захода на посадку, что небезопасно для посадки на ВПП с ограниченными размерами. Кроме того, из-за существенных динамических и массогабаритных характеристик оптической системы, увеличивается время адаптации и оперативное управление оптической системой при заходе на посадку различных типов ЛА.
Известно техническое решение [2] (Зуев В.Е., Фадеев В.Я. Лазерные навигационные устройства. - М.: Радио и связь, 1987. - Стр.89), содержащее установленные в начале ВПП три лазерных излучателя, два из которых расположены по краям, а третий на продольной оси ВПП. Данная система с помощью лазерных лучей формирует в пространстве линейные ориентиры, по которым пилот выполняет снижение и посадку ЛА вблизи расчетной точки приземления.
Недостатком технического решения [2] является то, что при ориентации по известной системе посадки касание ВПП происходит на различных расстояниях от порога ВПП для ЛА, имеющих отличия по высоте расположения кабины пилота относительно нижней точки шасси в режиме захода на посадку, что небезопасно при коротких ВПП и, особенно, при посадке на палубу авианесущего корабля.
Наиболее близким техническим решением является лазерная система посадки воздушных судов [3] (патент РФ № 2369532, МПК B64F 1/18), которая содержит три лазерных излучателя, установленных вблизи взлетно-посадочной полосы со стороны захода воздушного судна на посадку, два из которых левый и правый - глиссадные - расположены по краям полосы на фиксированном расстоянии d0 от начала полосы.
Недостатком данного технического решения [3] является фиксированное положение излучателей относительно порога ВПП, что не позволяет пилотам ЛА, имеющим отличия по высоте расположения кабины относительно нижней точки шасси или тормозного крюка, проводить визуальную индикацию траектории снижения ЛА для выполнения посадки в расчетной точке посадочной полосы, например, для гарантированного захвата тормозным крюком ЛА троса аэрофинишера.
Целью изобретения является формирование глиссадных лучей, обеспечивающих индивидуальные (расчетные) траектории снижения ЛА, которые отличаются высотой расположения кабины пилота относительно нижней точки шасси или тормозного крюка и, как следствие, выполнение касания шасси самолета или захвата тормозным крюком ЛА троса аэрофинишера в заданной точке ВПП при посадке ЛА.
Поставленная цель достигается тем, что расположенные по краям взлетно-посадочной полосы левый и правый лазерные излучатели, например лазерные излучатели с оптическими формирователями пространственного положения глиссадных лучей, выполнены с возможностью дистанционного перемещения параллельно оси ВПП и фиксации их на расстоянии d от порога ВПП, которое функционально связано с высотой расположения кабины пилота конкретного типа ЛА, заходящего на посадку, относительно нижней точки шасси или тормозного крюка. При этом пилот ЛА, зрительно ориентируясь по глиссадным лучам, обеспечивает касание шасси или зацеп тормозным крюком ЛА троса аэрофинишера в заданной точке ВПП.
Система посадки летательных аппаратов отличается от известного технического решения, содержащего расположенные по краям взлетно-посадочной полосы (ВПП) со стороны захода воздушного судна на посадку, по крайней мере, левый и правый лазерные излучатели и соответствующие левый и правый формирователи пространственного положения глиссадных лучей под углом φ к плоскости ВПП тем, что система посадки дополнительно снабжена левым и правым устройством перемещения формирователей пространственного положения глиссадных лучей с возможностью фиксации их на расстоянии d от порога ВПП, которое функционально связано с высотой h расположения кабины пилота относительно нижней точки шасси или тормозного крюка и высотой hпор пересечения летательным аппаратом типа Si порога ВПП соотношением
di=(hпор+hi)tgφ.
Кроме того:
- формирователи пространственного положения глиссадных лучей выполнены в виде клиновидной прозрачной пластины с углом клина α в вертикальной плоскости для малого угла, равным [4]:
α=φ/(n-1)
или в общем виде
α=arctg[Sinφ/(n-Cosφ)],
где α - угол клина пластины,
n - показатель преломления материала пластины,
φ - угол глиссады;
- формирователи пространственного положения глиссадных лучей выполнены в виде m-пар, каждая из которых состоит из правого фm и левого фm* формирователя
(правые - ф1, ф2, … фi, … фm; левые - ф1*, ф2*, … фi*, … фm*) и установленых на расстояниях d1, d2 … di … dm от порога ВПП в соответствие с выражением di = (hпор + hi )tg φ;
- на оптические поверхности пластины нанесено прозрачное токопроводящее покрытие, соединенное с источником питания и устройством контроля и регулирования температуры пластины с возможностью поддержания температуры пластины выше точки росы.
- оптические поверхности пластины выполнены с просветляющим покрытием на длине волны лазерного излучателя;
- расчеты координат места фиксации формирователей пространственного положения глиссадных лучей по формуле di = (hпор + hi)tgφ для летательного аппарата типа Si и формирование управляющих команд осуществляется центральным процессором системы управления полетами.
Сущность изобретения поясняется рисунками фиг.1(а, б), фиг.2, фиг.3, фиг.4 и фиг.5.
На фиг. 1(а, б), фиг. 2 приведена схема расположения лазерных излучателей и формирователей пространственного положения глиссадных лучей, установленных на устройствах для перемещения формирователей параллельно оси ВПП, а также положение в пространстве относительно плоскости ВПП лучей лазерных излучателей и глиссадных лазерных лучей для двух типов ЛА, отличающихся высотой расположения кабины пилота относительно нижней точки шасси. На фиг.3 - показан оптический формирователь пространственного положения глиссадных лучей в виде клиновидной прозрачной пластины.
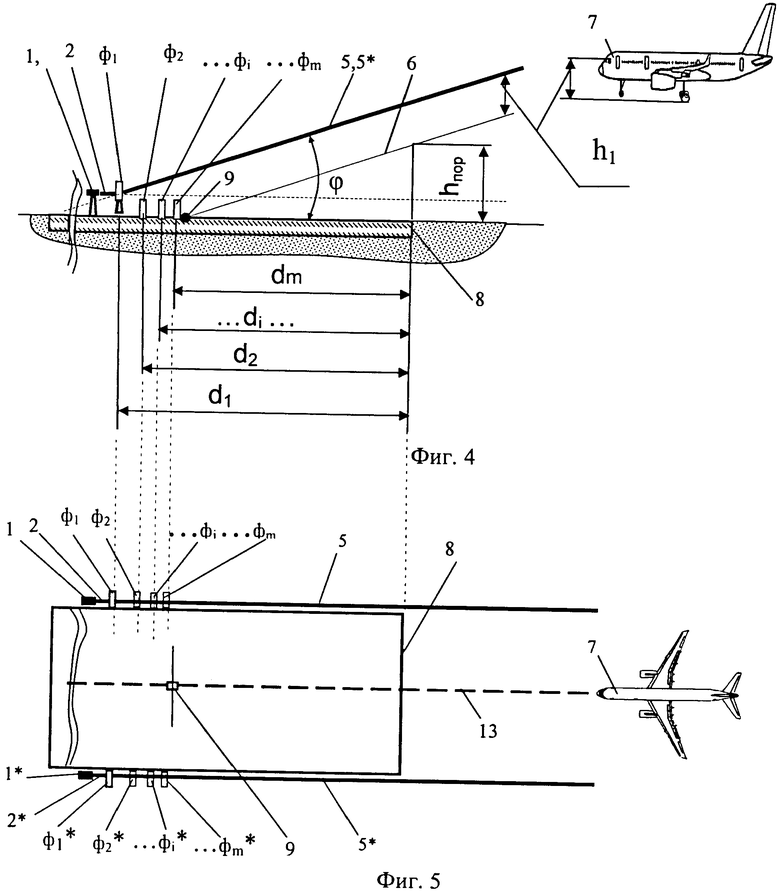
На фиг. 4 и фиг. 5 приведен вариант системы посадки летательных аппаратов на взлетно-посадочную полосу, например на посадочную площадку авианесущего корабля с использованием m-пар формирователей пространственного положения глиссадных лучей, включающих правые формирователи фm и левые фm*, установленные по краям взлетно-посадочной полосы (ВПП) со стороны захода воздушного судна на посадку,
На фиг.1 (а, б), фиг. 2, фиг.3, фиг. 4 и фиг. 5 приняты следующие условные обозначения:
1, 1* - правый и левый лазерные излучатели;
2, 2* - лучи лазерных излучателей;
3, 3* - формирователи пространственного положения глиссадных лучей;
4, 4* - устройство перемещения и фиксации формирователей пространственного положения глиссадных лучей;
5, 5* - глиссадные лучи (пример для ЛА типа S1 поз. 7);
6 - траектория движения нижней точки шасси или тормозного крюка ЛА;
7 - ЛА типа S1; 8 - порог ВПП; 9 - точка касания шасси ЛА (или тормозного крюка) поверхности ВПП; 10, 10* - глиссадные лучи (пример для ЛА типа Sm поз. 11); 11 - ЛА типа Sm; 12, 12* - боковые границы ВПП; 13 - осевая линия (ось) ВПП; 14 - клиновидная прозрачная пластина; 15 - входная грань клиновидной пластины; 16 - выходная грань клиновидной пластины; 17 - геометрическая ось клиновидной пластины; φ - угол глиссады; hпор - заданная высота пересечения порога ВПП; h1 - расстояние от кабины до нижней точки колес шасси (пример для ЛА 7 типа S1); hm - расстояние от кабины до нижней точки колес шасси (пример для ЛА 11 типа Sm); d1, d2, … di, … dm - расстояния от порога ВПП до места фиксации формирователей пространственного положения глиссадных лучей для различных типов ЛА (S1, S2 … Si …Sm);
ф1, ф1*; ф2, ф2*;…фi, фi*;…фm фm*) - правые (фi ) и левые (фi*) формирователи, априори установленные на расстояниях d1, d2, … di, … dm с возможностью введения в режим формирования глиссадных лучей для соответствующих типов ЛА (S1, S2…Si…Sm).
Формирование глиссады для конкретного типа ЛА рассмотрим на примере, приведенном на фиг.1а (пример для ЛА типа S1 поз.7, h1). Перед заходом на посадку самолета поз.7 с высотой расположения кабины пилота относительно нижней точки шасси h1 система управления положением глиссады производит расчет расстояния d1 от порога ВПП 8 до места фиксации формирователей пространственного положения глиссадных лучей по формуле d1=(hпор+h1)tgφ и вырабатывает сигналы управления. Устройства перемещения 4 и 4* под действием управляющих команд дистанционно устанавливают и фиксируют формирователи 3 и 3* на расчетном расстоянии d1 от порога ВПП. Лазерные лучи 2 и 2* правого и левого излучателей 1 и 1*, проходя через формирователи 3 и 3*, выполненные в виде клиновидной прозрачной пластины с входной и выходной гранями (фиг.3 поз. 14, 15, 16, 17), отклоняются на угол φ, образуя правый 5 и левый 5* глиссадные лучи. Пилот ЛА (поз. 7), визуально ориетируясь по сформированой глиссаде, обеспечивает траекторию движения нижней точки шасси самолета по линии 6 и касание шасси ЛА поверхности ВПП в точке 9.
Процесс формирования глиссады (фиг. 1(б), фиг. 2) для летательного аппарата с высотой hm расположения кабины пилота относительно нижней точки шасси (пример для ЛА типа Sm поз.11, hm<h1) аналогичен формированию глиссады для ЛА типа S1 поз.7 фиг.1а. и принципиально не отличается от описанного примера, за исключением того, что перед заходом на посадку самолета поз.11 с высотой расположения кабины пилота относительно нижней точки шасси hm система управления положением глиссады производит расчет расстояния dm от порога ВПП 8 до места фиксации формирователей пространственного положения глиссадных лучей по формуле dm=(hпор+hm)tgφ и вырабатывает сигналы формирования глиссады для летательного аппарата Sm. Пилот ЛА поз.11, визуально ориентируясь по сформированной глиссаде (глиссадные лучи 10,10*), обеспечивает движение нижней точки шасси самолета по траектории 6, т.е. по той же траектории, что и для случая посадки ЛА поз.7, и, соответственно, касание шасси ЛА поз.11 поверхности ВПП происходит в точке 9.
Формирование глиссады в системе посадки летательных аппаратов (фиг.4; 5) с использованием m-пар (ф1, ф1*; ф2, ф2*;…фi, фi*;…фm фm* правых и левых [*]) формирователей пространственного положения глиссадных лучей, осуществляется одной из пар фi, фi* для ЛА Si-типа. Формирователи пространственного положения глиссадных лучей априори установлены на фиксированных расстояниях d1, d2… di… dm от порога ВПП, рассчитанных по формуле di=(hпор+hi)tgφ в соответствии с параметрами h1, h2… hi…hm летательных аппаратов S1, S2… Si…Sm типов и в исходном состоянии не взаимодействуют с лучами лазерных излучателей 2,2*. Требуемая глиссада для точной посадки конкретного ЛА, например, для точной посадки самолетов на палубу корабля с захватом тормозным крюком ЛА троса аэрофинишера в одной точке для всех типов ЛА, формируется по команде от системы управления автоматическим введением в лазерный луч соответствующей пары формирователей. Пилот ЛА (поз.7), визуально ориентируясь по сформированной глиссаде (глиссадные лучи 5, 5*), обеспечивает траекторию движения нижней точки шасси самолета по линии 6 и касание шасси ЛА поверхности ВПП в точке 9.
Источники информации
1. Павленко В.Ф. Корабельные самолеты. - М.: Воениздат, 1990. - Стр. 259-261.
2. Зуев В.Е., Фадеев В.Я. Лазерные навигационные устройства. - М.: Радио и связь, 1987. - Стр.89
3. Патент РФ №2369532, МПК B64F 1/18.
4. Справочник конструктора оптико-механических приборов. Под общ. ред. В.А. Панова. 3-е изд., перераб. и доп. - Л.: Машиностроение, Ленингр. отделение, 1980. - 742 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) | 2014 |
|
RU2575554C2 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) НА МАЛОРАЗМЕРНЫЕ ВЗЛЕТНО-ПОСАДОЧНЫЕ ПЛОЩАДКИ (ВПП) | 2012 |
|
RU2494018C1 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) НА МАЛОРАЗМЕРНЫЕ ВЗЛЕТНО-ПОСАДОЧНЫЕ ПЛОЩАДКИ (ВПП) | 2013 |
|
RU2547157C2 |
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2397115C1 |
| СИСТЕМА ВИЗУАЛЬНОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) | 2012 |
|
RU2522766C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛА В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2601511C1 |
| СИСТЕМА ИНДИКАЦИИ ВЫСОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) НАД ПОРОГОМ ВЗЛЕТНО - ПОСАДОЧНОЙ ПОЛОСЫ (ВПП) | 2012 |
|
RU2518891C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ И ПРИ ДВИЖЕНИИ ПОСЛЕ ПРИЗЕМЛЕНИЯ | 2011 |
|
RU2465652C1 |


Изобретение относится к области авиации, в частности к системам посадки летательных аппаратов, и предназначено для обеспечения визуальной пространственной ориентации пилота при заходе на посадку в условиях ограниченной видимости. Система формирует глиссадные лучи, обеспечивающие индивидуальные траектории снижения ЛА, в зависимости от высоты расположения кабины пилота относительно нижней точки шасси или тормозного крюка. Система посадки летательных аппаратов содержит расположенные по краям ВПП со стороны захода воздушного судна на посадку правый и левый лазерные излучатели и соответствующие формирователи пространственного положения глиссадных лучей под углом к плоскости ВПП и снабжена соответственно левым и правым устройством перемещения формирователей с возможностью фиксации их на расстоянии d до порога ВПП, которое функционально связано с высотой расположения кабины пилота относительно нижней точки шасси или тормозного крюка (h) и высотой пересечения летательным аппаратом порога ВПП (hпор). Расчеты координат мест фиксации формирователей перед посадкой конкретного летательного аппарата и формирование управляющих команд для устройств перемещения формирователей осуществляется центральным процессором системы управления полетами. Повышается точность управления и безопасность полетов. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Система посадки летательных аппаратов, содержащая расположенные по краям взлетно-посадочной полосы (ВПП) со стороны захода воздушного судна на посадку по крайней мере правый и левый лазерные излучатели и соответствующие формирователи пространственного положения глиссадных лучей под углом φ к плоскости ВПП, отличающаяся тем, что дополнительно снабжена соответственно правым и левым устройствами перемещения формирователей пространственного положения глиссадных лучей с возможностью фиксации их на расстоянии di до порога ВПП, которое функционально связано с высотой hi расположения кабины пилота летательного аппарата Si относительно нижней точки шасси или тормозного крюка и высотой hпор пересечения летательным аппаратом порога ВПП соотношением di=(hпор+hi)tgφ.
2. Система посадки летательных аппаратов по п.1, отличающаяся тем, что формирователи пространственного положения глиссадных лучей выполнены в виде клиновидной прозрачной пластины с углом клина α в вертикальной плоскости, равным
α=arctg[Sinφ/(n-Cosφ)],
где α - угол клина пластины;
n - показатель преломления материала пластины;
φ - угол глиссады.
3. Система посадки летательных аппаратов по п.2, отличающаяся тем, что на оптические поверхности клиновидной прозрачной пластины нанесено прозрачное токопроводящее покрытие, соединенное с источником питания и устройством контроля и регулирования температуры пластины с возможностью поддержания температуры пластины выше температуры точки росы.
4. Система посадки летательных аппаратов по п.2, отличающаяся тем, что оптические поверхности клиновидной прозрачной пластины выполнены с просветляющим покрытием на длине волны лазерного излучателя.
5. Система посадки летательных аппаратов по п.1, отличающаяся тем, что расчеты места фиксации di формирователей пространственного положения глиссадных лучей и формирование управляющих команд осуществляются центральным процессором системы управления полетами.
6. Система посадки летательных аппаратов, содержащая расположенные по краям взлетно-посадочной полосы (ВПП) со стороны захода воздушного судна на посадку по крайней мере правый и левый лазерные излучатели и соответствующие формирователи пространственного положения глиссадных лучей под углом φ к плоскости ВПП,
отличающаяся тем, что формирователи пространственного положения глиссадных лучей выполнены в виде m пар правых и левых [*] (ф1, ф1*; ф2, ф2*;…фi, фi*;… фm, фm*) формирователей с возможностью введения в режим формирования глиссадных лучей и которые установлены на расстоянии di до порога ВПП, которое функционально связано с высотой hi расположения кабины пилота летательного аппарата Si относительно нижней точки шасси или тормозного крюка и высотой hпор пересечения летательным аппаратом порога ВПП соотношением di=(hпор+hi)tgφ.
7. Система посадки летательных аппаратов по п.6, отличающаяся тем, что формирователи пространственного положения глиссадных лучей выполнены в виде клиновидной прозрачной пластины с углом клина α в вертикальной плоскости равным:
α=arctg[Sinφ/(n-Cosφ)],
где α - угол клина пластины;
n - показатель преломления материала пластины;
φ - угол глиссады.
8. Система посадки летательных аппаратов по п.7, отличающаяся тем, что на оптические поверхности клиновидной прозрачной пластины нанесено прозрачное токопроводящее покрытие, соединенное с источником питания и устройством контроля и регулирования температуры пластины с возможностью поддержания температуры пластины выше температуры точки росы.
9. Система посадки летательных аппаратов по п.7, отличающаяся тем, что оптические поверхности клиновидной прозрачной пластины выполнены с просветляющим покрытием на длине волны лазерного излучателя.
10. Система посадки летательных аппаратов по п.6, отличающаяся тем, что расчеты места установки di формирователей пространственного положения глиссадных лучей и формирование управляющих команд осуществляются центральным процессором системы управления полетами.
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2397115C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1989 |
|
SU1828036A1 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2007 |
|
RU2369532C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ | 2000 |
|
RU2208556C2 |
| US 4196346 A, 01.04.1980. | |||

