Изобретение относится к области авиации и предназначено для установки на летательные аппараты (ЛА) корабельного базирования (при посадке на палубу).
Известна система управления выпуском тормозного крюка палубного самолета F14 [1] . В системе могут быть два положения крюка: "выпущено" на воздушном участке траекторий до зацепления и "убрано" после посадки на палубу авианосца. Тормозной крюк (гак) содержит гидроамортизатор, штангу, захват, шарнирные соединения, замок убранного положения. Посадочный радиолокационный комплекс (ПРЛК) выводит ЛА в фиксированную область по высоте H, курсу ψ , дальности D при известном значении скорости V, определяемом автоматом тяги, и далее летчик пилотирует самолет по глиссаде, образуемой системой посадки, если не поступил сигнал "запрет посадки". Этот этап отличается большой напряженностью и дефицитом времени для летчика (0,8-1 с полет от кормы корабля до зацепления).
Однако данная схема управления тормозным крюком не учитывает изменение параметров полета ЛА непосредственно перед касанием палубы, обусловленных самим алгоритмом управления посадкой: переход с траекторного управления на стабилизацию углового положения, перевод рукоятки управления двигателями (РУД) на режим "максимал", и, следовательно, не влияет на точность зацепления гака за один из тросов аэрофинишера. Выключение двигателя, работающего в режиме "максимал" для ухода на 2-ой круг, целиком возлагается на летчика, работающего в условиях перегрузки.
Известна система управления тормозным крюком палубного самолета F/A-18 [1] . В системе управления его также используются два положения крюка: "выпущено" на воздушном участке посадочной траектории и "убрано" после посадки на палубу авианосца.
Тормозной крюк самолета F/A-18 крепится к внешнему фиксированному пилону. Вертикальный силовой цилиндр - амортизатор крепится верхним концом к планеру самолета, а нижним к шарнирному соединению тормозного крюка. Пружинно-масляный амортизатор, расположенный в корневой части, удерживает его в центральном положении. Для обеспечения посадки при отклонении от курса тормозной крюк может шарнирно поворачиваться в горизонтальной плоскости на угол +20o.
Однако дискретное положение тормозного крюка ("выпущено-убрано") не влияет на точноcть зацепления за трос аэрофинишера для ЛА, совершающего посадку в сложных метеорологических условиях, при качке корабля. Посадка параллельно оси ВПП с боковым отклонением приводит к сверхрасчетной нагрузке на трос аэрофинишера, что вызывает его разрыв, а при раннем (несвоевременном) выключении силовой установки исключается возможность ухода ЛА, при необходимости, на второй круг. При посадке корабельных ЛА на аэрофинишер авианосца часто происходит захват троса аэрофинишера, когда ЛА находится в воздухе и не коснулся пневматиками палубы корабля. Это бывает, когда летчик делает попытку исправления каких-либо ошибок путем увеличения угла тангажа на малой скорости у самой палубы. При этом происходят рост угла тангажа и захват троса аэрофинишера до касания стойками шасси палубы авианосца. В зависимости от геометрии шасси и тормозного гака и центровки ЛА результирующая тормозная сила может проходить ниже центра масс ЛА, создавая значительный пикирующий момент. Скорость опускания носа ЛА, которая будет в момент касания носовой стойки шасси палубы авианосца, приводит к большим нагрузкам на шасси и летчика (до 15g кратковременно). Кроме того, часто наблюдаются посадки с креном и скольжением, посадки с большой вертикальной скоростью, с опущенной носовой и хвостовой частями самолета.
Выключение двигателей после зацепления за трос производится летчиком с запаздыванием - после остановки самолета.
Задача захода на посадку и посадки на авианосец является прецизионной по точности, поскольку на обусловлена внешними условиями, характеристиками авианосца и характеристиками системы "летчик-планер-двигатель". При посадке предъявляются весьма жесткие требования по летным характеристикам и пилотажным качествам. Посадка на аэрофинишер выполняется при различных сочетаниях тормозящей силы и отрицательных продольных ускорений самолета, при разных массах самолета и боевой нагрузки.
Предлагаемым изобретением решается задача повышения точности и безопасности зацепления самолетного тормозного крюка (гака) за трос аэрофинишера и уменьшения количества повторных заходов на посадку палубных ЛА, автоматизации отключения силовой установки ЛА.
Для решения указанной задачи в системе автоматизированного управления тормозным крюком и двигателем управления тормозным крюком и двигателем при посадке летательного аппарата на палубу корабля, содержащей тормозной крюк-гак с захватом за трос гидравлического аэрофинишера, дистанционно управляемый привод тормозного крюка, тумблер выпуска гака, систему автоматического торможения колес летательного аппарата, посадочный радиолокационный комплекс с вычислителем параметров, оптическую систему посадки, стабилизированную по углам дифферента и крена, линию передачи сигналов управления, дистанционно управляемый привод тормозного крюка выполнен следящим электрогидравлическим с усилителем-сумматором, соединенным с тумблером выпуска гака, также система автоматизированного управления тормозным крюком и двигателем снабжена вычислителем положения тормозного крюка, выход которого соединен у усилителем-сумматором следящего электрогидравлического привода тормозного крюка, а входы подключены к датчику малой высоты, тензодатчику тормозного крюка, датчикам обжатия стоек шасси, скорости, вертикальной скорости и угла тангажа, формирователем индексов электронно-лучевой трубки, видеосмесителем, шлемным прицелом с коллиматорным блоком и окуляром, оптически связанным с электронно-лучевой трубкой, с устройством съема углов положения головы и глаз летчика в вертикальной и боковой плоскостях соответственно, подключенным двумя выходами к формирователю индексов электронно-лучевой трубки, а также его первый выход соединен с вычислителем положения тормозного крюка, а второй выход связан с системой автоматического торможения колес летательного аппарата, привод двигателя летательного аппарат выполнен электрогидравлическим с усилителем-сумматором, соединенным с тумблером включения двигателя, а выход электрогидравлического привода двигателя летательного аппарата через механический сумматор соединен с краном дросселя двигателя, второй вход механического сумматора соединен с ручкой управления двигателя, при этом линия передачи сигналов на борту летательного аппарата соединена с формирователем индексов электронно-лучевой трубки, усилителем-сумматором электрогидравлического привода двигателя летательного аппарата, вычислителем положения тормозного крюка, первый и второй входы видеосмесителя связаны с формирователем индексов электронно-лучевой трубки и телевизионной камерой, установленной на продольной оси летательного аппарата, а его выход связан с входом электронно-лучевой трубки, в корабельной части посадочный радиолокационный комплекс с вычислителем параметров связан с вычислителем запрета посадки, соединенным с линией передачи сигналов управления, которая, в свою очередь, связана с вычислителем экстремальных характеристик, а на оптической системе посадки, стабилизированной по углам диферента и крена, установлена сигнальная лампа, связанная через релейную схему, соединенную с линией передачи сигналов управления и с выходом вычислителя экстремальных характеристик, с источником питания, в гидравлическом аэрофинишере установлены на тормозных барабанах датчики скорости вращения, выходы которых соединены с вычислителем экстремальных характеристик, другие входы которого связаны с датчиками скоростей тросов аэрофинишера.
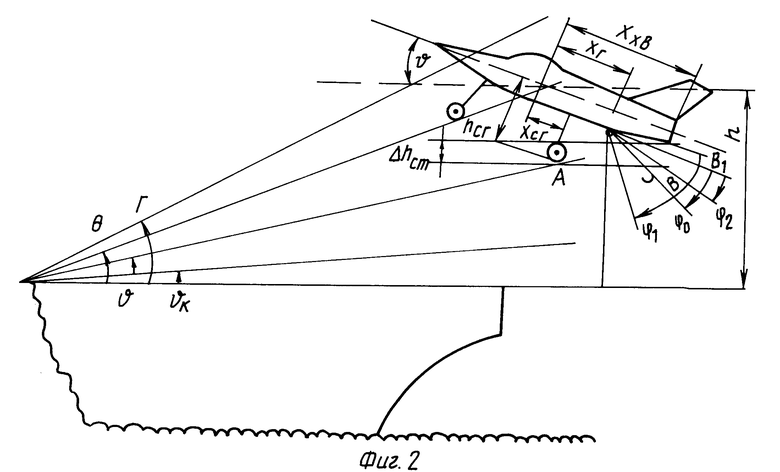
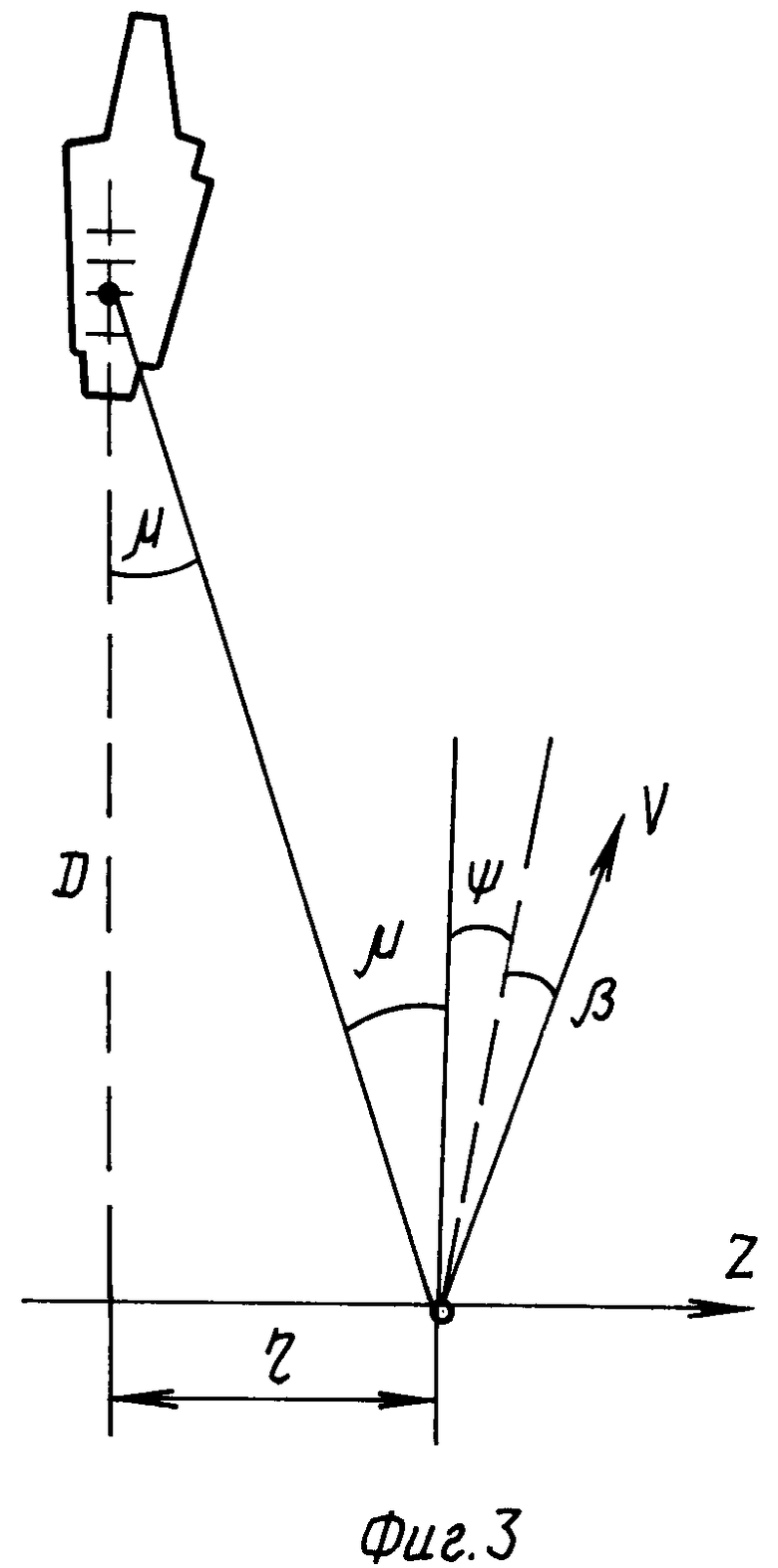
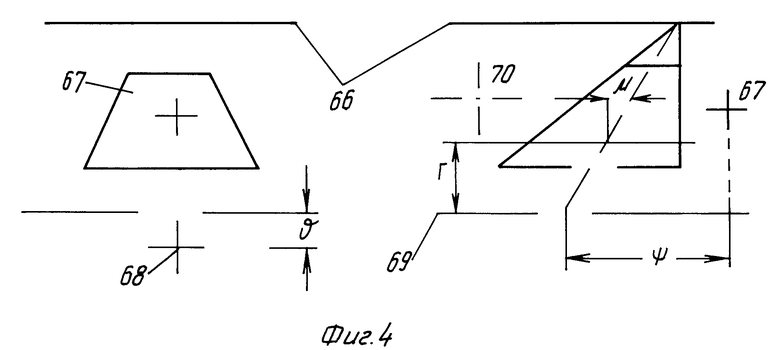
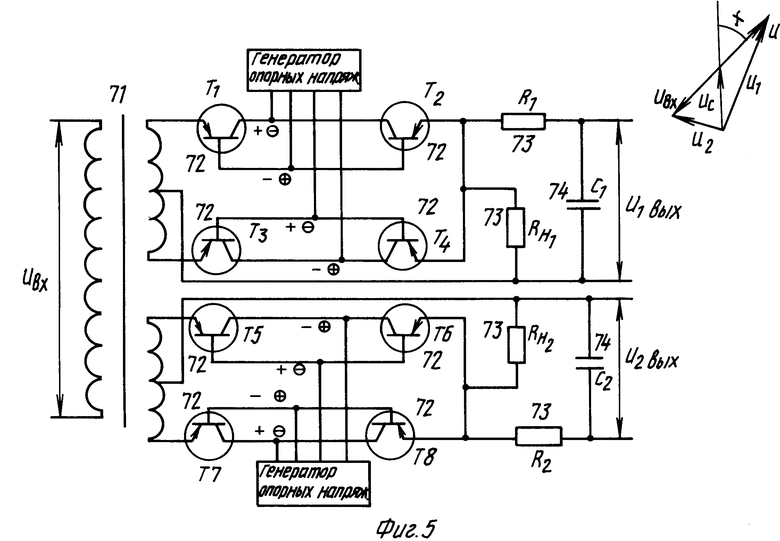
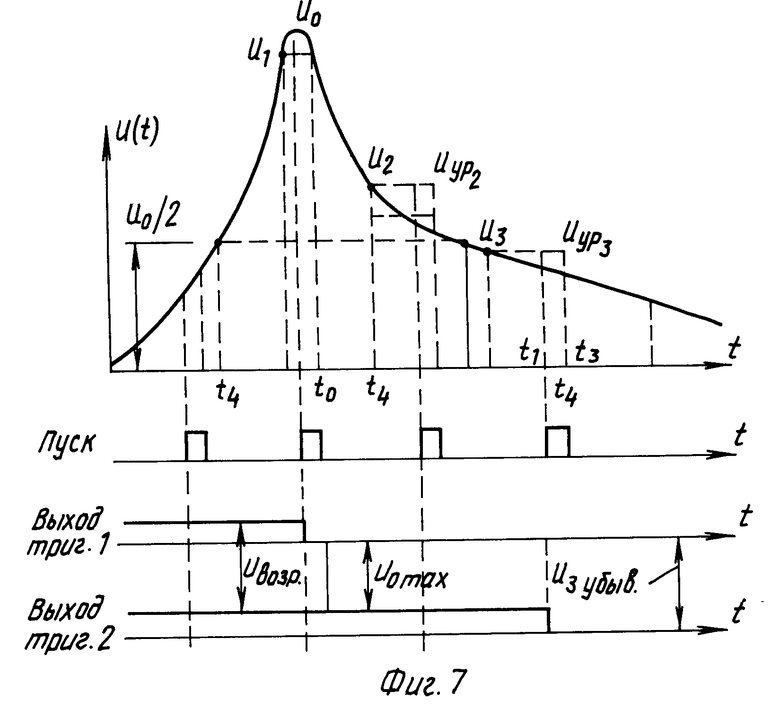
Система автоматизированного управления тормозным крюком и двигателем (АУТКД) при посадке ЛА на палубу корабля изображена в виде общей блок-схемы на фиг. 1, на фиг. 2 представлены кинематические и геометрические соотношения при посадке ЛА в продольной плоскости, на фиг. 3 - в боковой плоскости, на фиг. 4 - система индикации, реализованная на телевизионной трубке шлемного прицела, на фиг. 5 - принципиальная схема фазово-частотного детектора, на фиг. 6 изображено выполнение вычислителя 58 экстремальных характеристик, на фиг. 7 - временная диаграмма работы вычислителя.
Сущность изобретения поясняется фиг. 1, где изображены:
1 - шлемный прицел; 2, 3, 4 - фотоприемники; 5 - электронно-лучевая трубка; 6 - коллиматорная линза; 7 - зеркало; 8, 10 - полупрозрачное и спектральное (светофильтр) зеркала; 9 - прицельная сетка; 11 - глаз летчика; 12, 13 - излучатели (фотодиоды); 14 - управляемый источник питания; 15 - генератор опорного напряжения; 16 - усилители (три канала); 17 - инвертор; 18 - фазочувствительный детектор (ФЧД); 19 - видеосмеситель; 20 - формирователь индексов электронно-лучевой трубки (ЭЛТ); 21, 26, 29 - кнопка и тумблеры отметки явления вычислителя; включения двигателя, выпуска гака; 22 - линия передачи сигналов управления (ЛПСУ); 23 - ручка управления двигателем (РУД); 24 - механический сумматор (муфта пересиливания); 25 - усилитель-сумматор электрогидравлического привода двигателя летательного аппарата; 27 - вычислитель положения тормозного крюка; 28 - усилитель-сумматор следящего электрогидравлического привода тормозного крюка; 30 - телевизионная камера; 31 - объектив; 32 - координатная сетка; 33 - зеркало со следящим приводом; 34 - кран дросселя двигателя; 35 - электрогидравлический привод двигателя летательного аппарата (с датчиком обратной связи по положению); 36 - датчик угла тангажа; 37 - датчик скорости; 38 - датчик вертикальной скорости; 39 - датчик малой высоты; 40 - тензодатчик тормозного крюка; 41 - датчик обжатия стоек шасси; 42 - следящий электрогидравлический привод тормозного крюка (с датчиком обратной связи по положению); 43 - тормозной крюк-гак, снабженный захватом за трос гидравлического аэрофинишера; 44 - двигатель ЛА; 45 - система автоматического торможения колес летательного аппарат; 46 - тормозные устройства колес; 47 - колеса шасси; 48 - гидравлический аэрофинишер (барабанного типа); 49, 52 - механические приводы датчиков скорости вращения; 50, 51 - парные тормозные барабаны; 53, 54 - датчики скорости вращения (тахометры); 55, 56, 57 - датчики скоростей тросов; 58 - вычислитель экстремальных характеристик; 59 - линия передачи сигналов управления (ЛПСУ); 60 - вычислитель запрета посадки; 61 - посадочный радиолокационный комплекс (ПРЛК) с вычислителем параметров; 62 - релейная схема; 63 - источник питания; 64 - сигнальная лампа (с синим светофильтром); 65 - оптическая система посадки (ОСП), стабилизированная по углам дифферента и крена.
На фиг. 4: 66 - индекс горизонта; 67 - точка наведения; 68 - индекс продольной оси ЛА; 69 - индекс опорной лини глиссады; 70 - индекс вектора скорости.
На фиг. 5: 71 - трансформатор; 72 - T1 - T8-триодные транзисторы; 73 - резисторы; 74 - электрические емкости.
На фиг. 6: 75 - аналого-цифровой преобразователь (АЦП); 76 - компаратор; 77 - цифроаналоговый преобразователь (ЦАП); 78 - устройство управления; 79, 80 - триггеры; 81, 87 - ключи; 82 - генератор импульсов; 83 - указатель экстремумов; 84, 88 - счетчики импульсов; 85 - регистр сдвига; 86 - линия задержки; 87 - устройство съема углов положения головы и глаз летчика в вертикальной и боковой плоскостях.
Перед глазом летчика 11 установлен выдвинутый окулятор с полупрозрачными зеркалами 8, спектральным зеркалом 10, прицельная сетка 9, на которые подается через коллиматорную линзу 6 и зеркало 7 изображение с ЭЛТ 5, установленной также на шлеме летчика. ЭЛТ 5 через видеосмеситель 19 соединена с телекамерой 30, которая с помощью объектива 31, координатной сетки 32 и стабилизированного в горизонте зеркала 33 направлена на место посадки. За положением головы летчика следит устройство съема углов положения головы и глаз летчика 87, которое включает в себя управляемый источник питания 14, соединенный с генератором опорной частоты 15, связанным с фазочувствительным детектором (ФЧД) 18, входы которого через усилители 16 и инвертор 17 связаны с фотоприемниками 2, 3, 4. Фотоприемники 2, 3, 4, установленные на шлеме летчика, оптически связаны с излучателями-фотодиодами 12, 13. Выходные цепи устройства съема углов положения головы и глаз летчика 87 - ФЧД 18 в продольной плоскости соединены с формирователем индексов ЭЛТ 5 и через вычислитель 27 и усилитель-сумматор 28 с электроприводом 42 тормозного крюка 43. В боковой плоскости выход устройства 87 - боковой канал ФЧД 18 соединен с системой автоматического торможения 45, приводящей в действие тормозные устройства 46 колес шасси 47. Усилитель-сумматор 28 соединен с тумблером 29 выпуска гака. Вычислитель 27 соединен с датчиком угла тангажа 36, датчиком скорости 37, датчиком вертикальной скорости 38, датчиком малой высоты 39, тензодатчиком тормозного крюка, датчиком обжатия стоек 41. Кнопка 21, расположенная на рукоятке управления, соединена с входом вычислителя 27 для фиксации взгляда летчика и отметки явления. Линия передачи сигналов управления (ЛПСУ) 22 соединена с формирователем индексов 20, с усилителем-сумматором 25 гидропривода, который, в свою очередь, соединен с самим электрогидроприводом 35. Усилитель-сумматор 25 соединен с тумблером 26 включения двигателя ЛА после процесса посадки на палубу корабля. Электрогидропривод 35 соединен через механический сумматор 24 с краном 34 дросселя двигателя, второй вход сумматора 24 соединен с РУД 23.
В корабельной части расположен гидравлический аэрофинишер 48 барабанного типа (изображен для одного троса), парные барабаны которого 50 и 51 соединены с помощью механических приводов 49 и 52 с датчиками скорости вращения - тахометрами 53 и 54. Выходы тахометров 53 и 54 соединены с вычислителем 58. Другие входы вычислителя 58 соединены с аналогичными датчиками для аэрофинишеров второго 57, третьего 56 и четвертого 55 тросов. Вычислитель 58 соединен с ЛПСУ 59, выход которой связан с вычислителем 60 запрета посадки и вычислителем 58. Вычислитель 60 запрета посадки соединен с ПРЛК 61. Выход вычислителя 58 соединен с релейной схемой 62, которая связывает источник питания 63 с сигнальной лампой 64, установленной в центральном горизонте оптической системы посадки 65, стабилизированной по углам дифферента и крена, и в свою очередь соединенной с ЛПСУ 59.
Система работает следующим образом.
Летчик по сигналам ПРЛК 61 выводит ЛА на заданную точку траектории посадки. Тумблером 29 летчик выпускает тормозной крюк-гак 43 после того, как посадочный радиолокатор вывел ЛА в заданную точку и отсутствуют сигналы запрета посадки на ЭЛТ 5 шлемного прицела 1, подаваемые из вычислителя запрета посадки 60 в соответствии с прогнозируемыми параметрами дальности L, бокового уклонения Z, вертикальной скорости Vу и угла тангажа ϑ. В режиме стабилизации углов ЛА летчик может наблюдать визуально через окуляр шлемного прицела и на экрана ЭЛТ 5, видимой в бесконечности, с помощью телевизионной камеры 30 с перекрестием - сеткой 32 и зеркалом 33 за процессом захвата крюком 43 троса аэрофинишера.
Для обеспечения удовлетворительных характеристик при посадке и зацеплении летчик должен точно управлять по тангажу, исправляя ошибки по глиссаде. В этом случае летчик получает возможность корректировать траекторию ЛА для зацепления крюком за трос с прецизионной точностью при визуальном контроле картины зацепления, видимой в задней нижней полусфере ЛА. Наблюдение картины зацепления на ЭЛТ 5 и управление углом отклонения (установки) крюка 43 путем ввода сигналов шлемного прицела в вычислитель 27 и далее в усилитель-сумматор 28 и электрогидропривод 42 дают возможность устранить грубые промахи при зацеплении за трос, жесткую посадку ЛА, обрыв троса и др. Летчик наводит взгляд через окуляр шлемного прицела на точку касания и нажимает кнопку 21. Несовпадение углов прицеливания оси телевизионной камеры 30 с точкой наведения 67 (фиг. 4) и тросом летчик корректирует путем подачи сигналов отклонения взгляда и головы, поступающих с ФЧД 18. Сигналы идут на входы вычислителя 27 и далее после усиления на электрогидропривод 42. Летчик с помощью видимого углового положения тросов аэрофинишера и крюка 43 устраняет угловое рассогласование "крюк-трос" и наводит крюк 43 в точку зацепления за трос аэрофинишера. Летчик также вмешивается в управление и отклоняет поверхности управления с помощью ручки управления. При этом летчик до касания ЛА смотрит на лампу 64 и, не переводя взгляда, на осевую линию посадочной площадки.
Т. к. при зацеплении за трос ЛА летчик испытывает большие перегрузки, то автоматизация остановки двигателя облегчает этот процесс. Для этого на аэрофинишерах устанавливаются на тормозных барабанах 50 и 52 посредством механических приводов 49 и 51 датчики скорости вращения барабанов. Процесс захвата троса носит экстремальный характер, чем осложняет определение времени выключения двигателей. Сигналы тахометров 49 и 51 поступают в вычислитель 58, где решается следующее соотношение: если
то сигнал отключения двигателя tоткл, Vтр.прав - скорость правого барабана; 1аэр - первый аэрофинишер.
При выполнении данного условия сигналы с вычислителя 58 поступают на релейную схему 62, которая обеспечивает включение напряжения источника питания 63 на сигнальную лампу 64, снабженную синим светофильтром, контрастирующую на фоне источников света ОСП 65.
Указанный сигнал tоткл. вычислителя 58 наряду с сигналами дальности D и дифферента корабля ϑк посылается по ЛПСУ 59 в ЛПСУ 22. Этот сигнал проходит через усилитель-сумматор 25 на электрогидропривод 35, воздействующий через механический сумматор 24 на кран дросселя 34. Посредством механического сумматора 24 и РУД 23 летчик может, фиксируя световой сигнал с лампы 64, сам выключить двигатель. Если зацепления не произошло вследствие промаха и больших отклонений ЛА от заданной траектории, то летчик вынужден уйти на 2-ой круг.
Устройство управления тормозным крюком относится к типу смешанных, в которых летчик управляет параллельно с вычислителем 27 углового положения тормозного крюка. На вход вычислителя 27 поступают сигналы с датчиков обжатия стоек шасси 41, малых высот H (лазерный, изотопный и др.) 39, скорости V 37, угла тангажа ϑ 36, вертикальной скорости Vу 38 и сигналы дальности D и углов дифферента корабля ϑк, поступающие с ЛПСУ 22, а также сигналы тумблера 29 выпуска гака. После окончания процесса зацепления за трос аэрофинишера сигналы тензодатчика 40, тормозного крюка, поступают в логическое устройство вычислителя 27 и служат для уборки крюка при ϕ2 = 0. Информация указанных сигналов проходит через компараторы, делители напряжения и поступает на логическое устройство вычислителя 27.
В логическом устройстве вычислителя 27 реализуются следующие алгоритмы управления:
Допуски сигналов датчиков, поступающих на компараторы, реализованных на ограничениях a-a, b-b в дискретных точках, выбираются экспериментальным путем из условия получения сигналов вычислителя 27 при касании ЛА палубы и ухода на 2-ой круг. В дискретных точках компараторы контролируют прохождение ЛА заданной траектории.
Алгоритмы автоматического управления положением гака реализуются в логическом устройстве 27. Крайние положения гака для зацепления за трос аэрофинишера ϕ2,ϕ1. Угол ϕ2 соответствует состоянию, когда линия, образуемая башмаком гака (точка B) и основными стойками шасси в обжатом состоянии (точка A), параллельна посадочной палубе (наиболее позднее зацепление). В этом случае самое крайнее положение гака определяется по формуле
ϕ2= β-ϑ+ϑк, (3)
где
где
h
xг - расстояние "центр масс-гак";
xс - расстояние "центр масс-основные стойки шасси";
lг - длина тормозного крюка (гака);
ϑк - угол дифферента корабля;
ϑ - угол тангажа ЛА.
Угол ϕ1 соответствует состоянию, когда гак перпендикулярен траектории снижения (наиболее ранее зацепление),
где
θ - угол наклона траектории, при посадке θ отрицателен.
В этом диапазоне углов можно выделить поддиапазон, обеспечивающий зацепление без "хлыста" - зацепление за трос аэрофинишера, не ранее момента касания основных стоек посадочной палубы:
где
ϕ2 определяется по формуле (4), а  аналогичен углу ϕ2, но соответствует необжатым основным стойкам шасси:
аналогичен углу ϕ2, но соответствует необжатым основным стойкам шасси:
где
hс - высота основных стоек шасси в необжатом состоянии.
Необходимость управления угловым положением гака определяется
а) в диапазоне  посадка без "хлыста" с пролетом кормового среза корабля без зацепления гаком;
посадка без "хлыста" с пролетом кормового среза корабля без зацепления гаком;
б) в диапазоне  обеспечение зацепления за трос в критической ситуации, когда вероятен "хлыст" и как следствие - возможность поломки носовой стойки (не исключается), но уход на 2-ой круг по каким-либо причинам невозможен. При этом считается, что ЛА пролетел кормовой срез без зацепления гаком.
обеспечение зацепления за трос в критической ситуации, когда вероятен "хлыст" и как следствие - возможность поломки носовой стойки (не исключается), но уход на 2-ой круг по каким-либо причинам невозможен. При этом считается, что ЛА пролетел кормовой срез без зацепления гаком.
Пролет кормового среза без зацепления гаком требует определения углового положения гака ϕ, и разницы высот над кормовым срезом основных стоек и гака (Δhсг), фиг. 2, где hК - вертикальная составляющая качки. Принято, что основными стойками шасси ЛА не касается кормового среза (иначе - катастрофическая ситуация). Поэтому необходимо учитывать только отклонение кормового среза, вызванное угловой качкой - дифферентом корабля. Тогда условие незацепления гаком за кормовой срез будет:
- для случая а) выполняется всегда, т.к. AB параллельна палубе корабля;
- для случая б) необходимо значение угла отклонения гака при пролете кормового среза задавать по формуле (4).
Тогда закон управления положением гака для а) будет
для случая б)
где
D0 - расстояние от расчетной точки касания (РТК) до кормового среза.
Перед глазами летчика устанавливается выдвижной миниатюрный окулятор прицела, в поле зрения которого проецируется прицельное перекрестие, сфокусированное в бесконечность и поле зрения миниатюрной ЭЛТ 5, изображение на которую идет с телекамеры 30, установленной над фюзеляжем ЛА. Окуляр не мешает летчику и может убираться в специальное гнездо. Положение прицельного перекрестия регулируется рукоятками, расположенными на шлеме прицела.
Для прицеливания летчик поворачивает голову в такое положение, чтобы перекрестие 9 окуляра совместилось с точкой прицеливания (фиг. 4). За положением головы летчика следит следящая оптическая система: на шлеме 9 три фотодиода 2, 3, 4, а в кабине два фиксированных источника света (фотодиоды) 12, 13. Сигналы фотодиодов 2, 3, 4, идущие от шлема летчика по проводам, поступают в вычислитель, образованный блоками 14, 15, 16, 17, 18, вырабатывающий сигналы управления приводом 42, поворачивающим тормозной гак 43.
Электронно-оптический индикатор - ЭЛТ 5 на шлеме отображает картину посадки при помощи телекамеры 30. Малогабаритная ЭЛТ 5 монтируется на шлеме и через указанную выше оптическую систему поступает в поле зрения летчика. На индицируемую картину накладываются специально сформированные в формирователе 20 метки и индексы, указывающие положение ЛА в пространстве, а также другая информация для управления. При малых отклонениях угол глиссады Г = h/D отображается на ЭЛТ 5. Управление полетом ЛА по глиссаде производится по информации поля зрения ЭЛТ 5 с формированием опорных линий. На экране ЭЛТ необходимо идентифицировать метки опорной линии глиссады, позволяющей визуально определять возникающие отклонения, угол отклонения и ось ЛА. Эти линии опущены на угол Г ниже истинного горизонта. Погрешность наведения ЛА (угол Г) определяется как угол между этими опорными линиями и заданной точкой наведения. Для небольших значений параметров h и Г ошибка управления определяется
ε = ϑ+Г = ϑ+h/D (8)
В боковой плоскости нужна линия, указывающая направление расчетной траектории снижения, информация на которую идет от угла ψ гироскопа. Ошибка параметра поперечного управления ЛА μ = η/D определяется как видимый угол между точками пересечения траектории ЛА с линией горизонта и поперечной чертой на ЭЛТ 5. Поперечная глиссадная черта индицируется неподвижной сеткой на экране. Перед заходом на посадку по глиссаде ось телекамеры параллельна направлению глиссады и управление ведется путем юстировки точки наведения и непосредственно сетки, индицирующей ось телекамеры.
Обеспечение высокой точности регистрации при одновременном сохранении естественности условий работы пилота обусловлено трудностью выделения информации о величине отклонения оси глаз летчика при одновременном смещении его головы. Задача фиксации взаимного положения головы летчика и глаза и регистратора движений глаза решается путем размещения фотоприемников 2, 3, 4 на голове (шлеме) летчика. Принцип выделения сигналов рассогласования между каналами следующий. Если оптические расстояния одинаковы для приемников 2, 3, 4, на каждый из них попадает два световых потока 2-3, 3-4, равных по амплитуде и противоположных по фазе. Поэтому на частотном фазово-чувствительном детекторе (ФЧД) 18 сигнал равен нулю. В том случае, когда оптические расстояния не равны, на фотоприемник попадают неравные по амплитуде световые потоки противоположных фаз. Управляющий сигнал на выходе ФЧД 18 будет отличен от нуля и его полярность соответствует знаку угла χ. Фазово-чувствительный детектор 18 создает на своем выходе напряжение, пропорциональное сдвигу фаз χ между двумя сигналами, между сигналом Uм, соответствующим сигналу от излучателя, и сигналом Uоп от генератора опорного напряжения 15, имеется сдвиг фаз χ , то как следует из диаграммы напряжений

если обозначить C = Uм/Uоп,
то

при C << 1
U1≅ Uоп(1+Ccosχ),U2≅ Uоп(1-Ccosχ), (14)
следовательно,
Uc= Kтд(U1-U2) = 2KтдUоп•C•cosχ, (15)
где
Kтд - коэффициент передачи интегрирующей цепочки детектора.
Формирование сигналов, содержащих информацию о величине и направлении рассогласования, осуществляется с помощью ФЧД 18 (фиг. 5). Чтобы обеспечить работу схемы и выделение управляющих сигналов, соответствующих направлению рассогласования, на промежутки коллектор-база каждого триода подается опорное синусоидальное напряжение в той полярности, как это показано на схеме. Кружками обведены знаки, соответствующие второму полупериоду, без кружков - полярность опорного напряжения в течение первого полупериода для триодов T1, T2, T3, T4.
Опорное напряжение  сдвинуто по фазе на четверть периода по сравнению с
сдвинуто по фазе на четверть периода по сравнению с  По отношению к триодам T5 - T8 эти знаки характеризуют полярности опорных напряжений в I и II четвертях периода.
По отношению к триодам T5 - T8 эти знаки характеризуют полярности опорных напряжений в I и II четвертях периода.
Принцип работы указанного ФЧВ 18 основан на том, что при потенциале базы, отрицательном по сравнению с коллектором, триод становится проводящим как в направлении эмитер-коллектор, так и в обратном, поэтому каждая пара триодов (T1 - T2 и так далее) является проводящей в те полупериоды, когда минус опорного напряжения приложен к базе. Каждая пара триодов работает со своей половиной вторичной обмотки трансформатора.
Когда входной сигнал и опорное напряжение совпадают по фазе и полярность соответствует рисунку, то в течение первого полупериода триоды T1 и T2 открыты, а T3 и T4 закрыты. Сигналы с выхода вторичной обмотки трансформатора (верхней ее половины) выделяется на нагрузочном сопротивлении Rн, по которому течет ток i1.
Во втором полупериоде полярность опорных напряжений и входного сигнала меняется, триоды T3 и T4 отпираются, а триоды T1 и T2 запираются. Сигнал с выхода нижней половины вторичной обмотки (полярность показана знаками в кружках) через триоды T3 и T4 выделяется в той же полярности на сопротивление Rн, по которому протекает ток i2. Аналогичным образом прослеживается характер изменения входного сигнала по второму каналу при сдвиге фаз между входным и опорным напряжениями, равном π/2, а также при произвольной фазе входного сигнала.
Малогабаритная телевизионная камера 30 с комбинированной оптикой - объективом 31 (установлен на "бесконечность"), прицельной сеткой 32, стабилизированным в горизонте зеркалом 33 представляет собой передающую трубку типа видикон с кремниевой мишенью или прибор с зарядовой связью. Возможно дистанционное переключение поля зрения (20 или 5), разрешающая способность не менее 400 телевизионных линий на угловой размер поля зрения вдоль строк при контрастности цели 85%. Камера видикон размером 17 мм по диагонали, отношение строк растра 3:4, частота кадров 30 Гц. Указанная контрастность и разрешающая способность при освещенности от 1000 до 100000 лк. Смаз изображения отсутствует.
Оптическая система включает в себя дистанционно управляемый механизм изменения поля зрения в отношении 4:1 и привод светофильтра, который позволяет изменять уровень освещенности в 4-10 раз.
Неподвижное прицельное перекрестие 32, центр которого соответствует линии визирования с ошибкой, не превышающей 100 мкрад, служит базой для определения положения ЛА относительно заданной глиссады планирования и расчетной точки зацепления за трос аэрофинишера.
Камера 30 устанавливается на продольной оси ЛА в зону расположения точки приземления и таким образом, что ось ее направлена по траектории посадки. По линии связи изображение передается на видеосмеситель 17 телевизионного приемника на ЭЛТ 5 и далее посредством коллиматорного объектива 6 зеркала поступает в окуляр 8, 9, 10.
Летчик наблюдает на экране ЭЛТ 5 шлемного прицела 1 отклонение ЛА от требуемой траектории посадки и расчетной точки зацепления, обозначенных с помощью визирной сетки относительно тросов аэрофинишера, и управляет таким образом, чтобы ликвидировать отклонения. Летчик, зная размеры ЛА, крюка и его положение относительно палубы корабля, оценивает отклонение и с помощью органов управления и шлемного прицела изменяет местоположения крюка 43 и ЛА.
Использование вычислителя 27 компенсирует запаздывание летчика в принятии решений по отработке внешних воздействий.
В системе управления торможением колес ЛА 5, 6, 7 используются датчики угловых скоростей, установленные на колесах, каждое из которых снабжено тормозным устройством. Система автоматического торможения колес соединяется с тормозными устройствами 46. В данном случае вход системы автоматического торможения соединяется с выходом датчика ψ (ФУД 18) и внутренним генератором импульсов для устранения юза и проскальзывания тормозных колес.
Аэрофинишер для гашения при посадке скорости и ограничения пробега ЛА [3] , содержит натянутые поперек ВПП тросы, намотанные на барабаны, снабженные тормозами. Работа наземного тормозного устройства основана на использовании нескольких парных тормозных барабанов 50-51, на которые наматываются тросы, за которые цепляется тормозной крюк. Рассеивание и поглощение кинетической энергии приземляющегося ЛА происходит путем зацепления за трос и вращения тормозных барабанов, связанных с обратимыми гидронасосами - тормозными двигателями и устройствами перекачки и дросселирования жидкости. При этом нагрузки от троса поглощаются тормозными двигателями. Блоки, установленные на платформах вместе с двигателями, направляют тросы соответствующим двигателям. Гидравлический аэрофинишер с подпалубными тормозными гидроприводами при зацеплении посадочным гаком ЛА за трос аэрофинишера обеспечивает разматывание тросовых барабанов гидротормозов. При этом вытесняется тормозная жидкость через калибровочное отверстие в воздушный аккумулятор, тем самым обеспечивается торможение ЛА по заданной программе. Двигатели наматывают тросы на барабаны, создавая необходимое натяжение в зависимости от посадочного веса и скорости ЛА.
При посадке ЛА гак захватывает один из тросов аэрофинишера. Трос сматывается с барабана переменного диаметра, связанного с тормозным устройством. Аэрофинишер плавно затормаживает ЛА на участке пробега за 2,5-3 с.
В аэрофинишере на тормозных барабанах 50 и 51 посредством механических приводов 49 и 52 установлены датчики скорости 53 и 54, выходы которых связаны с вычислителем экстремальных характеристик 58.
На аэрофинишере предусмотрен специальный пост, с пульта которого оператор может регулировать величину натяжения тросов. К моменту остановки ЛА трос вытягивается почти на всю длину.
Сигнал автоматической остановки двигателей формируется при определении половинной части по времени нисходящей экстремальной зависимости U (t) (фиг. 7) силы натяжения или скорости сматывания троса при зацеплении крюка. Схема определения экстремальных характеристик сигнала, максимума в данном случае (для одного датчика), строится на основе АЦП. Схема вычислителя 58, фиг. 6, состоит из компаратора К 76, цифроаналогового преобразователя ЦАП 77, устройства управления УУ 78. Выход компаратора К 76 АЦП 75 подсоединен к входу двухразрядного сдвигового регистра, составленного из двух триггеров D-типа Tr 1 79 и Tr 2 80. АЦЦ 75 запускается задним фронтом импульса ПУСК в момент времени tз. По переднему фронту этого импульса в момент времени t1 заносится информация с выхода компаратора в Tr 1 79 с битового регистра и информация из Tr 1 переносится в Tr 2 80.
В исходном состоянии триггеры экстремума находятся в нулевом положении, все ключи разомкнуты. Импульс начала определения параметров "ПУСК" поступает на вход первого триггера 79 экстремума и перебрасывает его в единичное состояние, Первый ключ 81 замыкается и на вход первого счетчика поступают импульсы от генератора 82. АЦП 75 выполняет аналого-цифровые преобразования, на его выходе появляются коды, которые передаются на вход указателя экстремума.
В момент достижения экстремального значения входного сигнала его код появляется на выходе в указателе экстремума УЭ 83, а на выходе Сч 1 84 формируется сигнал, отмечающий время появления кода экстремального значения. Сигнал на выходе 84 переводит первый триггер 79 экстремума в нулевое, а второй 80 в единичное состояние. Первый ключ 81 размыкается и с выхода 84 первого счетчика снимается код параметра t0. После достижения экстремума его цифровой код поступает на цифровой параллельный вход регистра 85 сдвига и сдвигается на один разряд вправо, т.е. делится на два.
После этого задержанный на линии задержки 86 (ЛЗ) управляющий сигнал разрешает перенос деленного на два цифрового кода управления АЦП 75. Этот код преобразуется ЦАП 77, входящий в состав АЦП 75, в аналоговую форму и поступает на один из входов компаратора 76 АЦП 75. На другой вход компаратора 76 подается текущее значение сигнала. Как только текущее значение станет меньше половины максимального, сигнал об этом с выхода компаратора 76 через второй триггер 80 экстремума поступает на вход второго ключа 87 и прекращает сдвиг кода влево на один разряд, и тогда на его выходе появляется код полуширины экстремальной зависимости.
Временная диаграмма работы вычислителя приведена на фиг. 7. После поступления на вход первого импульса "ПУСК" АЦП 75 запускается в момент времени t и после цикла автокомпенсации в момент времени t4 на выходе ЦАП 77 появляется уравновешенный сигнал  равный с точностью до дискретности входному сигналу U1 и сохраняющийся на выходе ЦАП 77 до следующего цикла автокомпенсации.
равный с точностью до дискретности входному сигналу U1 и сохраняющийся на выходе ЦАП 77 до следующего цикла автокомпенсации.
Когда на запускающий вход АЦП 75 поступает второй импульс "ПУСК", входной сигнал равен значению U2. Таким образом, на один вход компаратора поступает с выхода ЦАП 77 значение  а на второй - значение U2. Поэтому в момент времени t знак приращения sign (U1,2) записывается в Tr 1 79 и одновременно информация из Tr 1 79 переносится в Tr 2 80. В момент времени t2 появляется импульс выдачи кода, по которому в вычислителе 58 считываются код U1 и код экстремума. После этого по заднему фронту импульса "ПУСК" в момент времени t3 происходит запуск АЦП 75, и после окончания цикла автокомпенсации в момент времени t4 на выходе ЦАП 77 появляется уравновешивающий сигнал
а на второй - значение U2. Поэтому в момент времени t знак приращения sign (U1,2) записывается в Tr 1 79 и одновременно информация из Tr 1 79 переносится в Tr 2 80. В момент времени t2 появляется импульс выдачи кода, по которому в вычислителе 58 считываются код U1 и код экстремума. После этого по заднему фронту импульса "ПУСК" в момент времени t3 происходит запуск АЦП 75, и после окончания цикла автокомпенсации в момент времени t4 на выходе ЦАП 77 появляется уравновешивающий сигнал 
В момент поступления третьего импульса "ПУСК" входной сигнал равен значению U3. На первый вход компаратора К 76 подается значение входного сигнала U3, а на второй - значение уравновешенного сигнала  В момент времени t1 значение sign(U1,2) переносится из Tr 1 79 в Tr 2 80, а значение знака приращения sign(U2,3) - в Tr 1. Таким образом, в Tr 1 79 будет храниться значение sign(U2,3), а в Tr 2 80 - значение sign(U1,2). В момент времени t2 в ЭЦВМ выдаются код U2 и код максимума в точке U2. Если и в двух триггерах 79-80 находятся единицы, то значение U2 расположено на возрастающем входном сигнале, если нули - то на убывающем сигнале. Значение U2 является максимумом, если в Tr 1 хранится ноль, а в Tr 2 80 находится единица. "Запрет" посадки реализуется в вычислителе 60 согласно алгоритму
В момент времени t1 значение sign(U1,2) переносится из Tr 1 79 в Tr 2 80, а значение знака приращения sign(U2,3) - в Tr 1. Таким образом, в Tr 1 79 будет храниться значение sign(U2,3), а в Tr 2 80 - значение sign(U1,2). В момент времени t2 в ЭЦВМ выдаются код U2 и код максимума в точке U2. Если и в двух триггерах 79-80 находятся единицы, то значение U2 расположено на возрастающем входном сигнале, если нули - то на убывающем сигнале. Значение U2 является максимумом, если в Tr 1 хранится ноль, а в Tr 2 80 находится единица. "Запрет" посадки реализуется в вычислителе 60 согласно алгоритму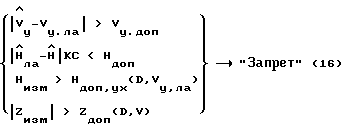
где прогнозируемое значение вертикальной скорости ЛА в ожидаемой точке касания;
прогнозируемое значение вертикальной скорости ЛА в ожидаемой точке касания; прогнозируемое значение высоты полета ЛА кормового среза (КС);
прогнозируемое значение высоты полета ЛА кормового среза (КС);
Hдоп.ух - допустимая граница высоты безопасного ухода на 2-ой круг;
Zдоп - допустимая граница предельных боковых отклонений.
ПРЛК 61 предназначен для инструментального управления заходом на посадку путем определения координат ЛА, угла места от горизонта, угла курса относительно путевой оси, наклонной дальности до точки установки его. ПРЛК строится по принципу одноканального следящего радиолокатора с коническим сканированием луча антенны, создающим в пространстве равносигнальную зону. При изменении углового положения ЛА в пространстве появляется сигнал ошибки, который обеспечивает автоматическое слежение антенны за ЛА. В основу ПРЛК положены радиолокационные принципы радиолокации, работающей в миллиметровом диапазоне волн [4].
Литература
1. Павленко В.Ф. Корабельные самолеты, М., Военное издательство, 1990, стр. 272, стр. 60, 92.
2. Быков Р.Е., Сигалов В.М., Эйсенгард Г.А. Телевидение, Высшая школа, М. 1988, стр. 146,
3. Белавин Н.И. Авианосные корабли, М., Патриот, 1990, стр. 46.
4. Астафьев Г.П., Шебшаевич В.С. и др. Радиотехнические средства навигации летательных аппаратов, М., Советское радио, 1962.
5. Матвеенко А.М. Расчет и испытание гидравлических систем летательных аппаратов, М., Машиностроение, 1974.
6. Устройство автоматического торможения летательных аппаратов, патент Франции 2001831, МПК B 64 F 1/100, 1970.
7. Система управления торможением летательного аппарата при посадке на палубу корабля, а.с. N 1797242, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2067951C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1990 |
|
SU1797242A1 |
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1995 |
|
RU2129971C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1991 |
|
SU1798988A1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |

Изобретение относится к области авиации и предназначено для установки на летательные аппараты (ЛА) корабельного базирования при посадке на палубу. Цель изобретения - повышение точности и безопасности посадки. Система автоматического управления тормозным крюком и двигателем при посадке ЛА на палубу корабля содержит тормозной крюк-гак с захватом за трос аэрофинишера, дистанционно управляемый привод крюка с помощью тумблера выпуска и уборки, систему управления торможением колес (СУТК) ЛА, гидравлический аэрофинишер с подпалубными тормозными приводами и барабанами, посадочный радиолокационный комплекс (ПРЛК), оптическую систему посадки (ОСП), стабилизированную по углам дифферента и крена, линию передачи сигналов управления (ЛПСУ) "борт-корабль", вычислитель положения тормозного крюка, шлемный прицел с коллиматорным блоком и окулятором, телевизионную электронно-лучевую трубку (ЭЛТ), видеосмеситель, устройство съема углов положения головы и глаз летчика в вертикальной плоскости, формирователь индексов ЭЛТ, телевизионную камеру, вычислитель экстремальных характеристик, вычислитель запрета посадки. 7 ил.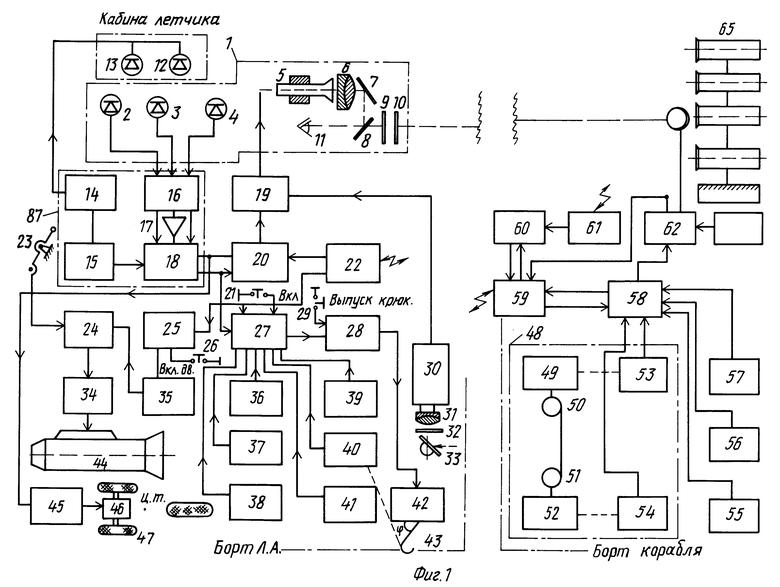
Система автоматизированного управления тормозным крюком и двигателем при посадке летательного аппарата на палубу корабля, содержащая тормозной крюк-гак с захватом на трос гидравлического аэрофинишера, дистанционно управляемый привод тормозного крюка, тумблер выпуска гака, систему автоматического торможения колес летательного аппарата, посадочный радиолокационный комплекс с вычислителем параметров, оптическую систему посадки, стабилизированную по углам дифферента и крена, линию передачи сигналов управления, отличающаяся тем, что дистанционно управляемый привод тормозного крюка выполнен следящим электрогидравлическим с усилителем-сумматором, соединенным с тумблером выпуска гака, также система автоматизированного управления тормозным крюком и двигателем снабжена вычислителем положения тормозного крюка, выход которого соединен с усилителем-сумматором следящего электрогидравлического привода тормозного крюка, а входы подключены к датчику малой высоты, тензодатчику тормозного крюка, датчиками обжатия стоек шасси, скорости, вертикальной скорости и угла тангажа, формирователем индексов электронно-лучевой трубки, видеосмесителем, шлемным прицелом с коллиматорным блоком и окуляром, оптически связанным с электронно-лучевой трубкой, с устройством съема углов положения головы и глаз летчика в вертикальной и боковой плоскостях соответственно, подключенным двумя выходами к формирователю индексов электронно-лучевой трубки, а также его первый выход соединен с вычислителем положения тормозного крюка, а второй выход связан с системой автоматического торможения колес летательного аппарата, привод двигателя летательного аппарата выполнен электрогидравлическим с усилителем-сумматором, соединенным с тумблером включения двигателя, а выход электрогидравлического привода двигателя летательного аппарата через механический сумматор соединен с краном дросселя двигателя, второй вход механического сумматора соединен с ручкой управления двигателем, при этом линия передачи сигналов на борту летательного аппарата соединена с формирователем индексов электронно-лучевой трубки, усилителем-сумматором электрогидравлического привода двигателя летательного аппарата, вычислителем положения тормозного крюка, первый и второй входы видеосмесителя связаны с формирователем индексов электронно-лучевой трубки и с телевизионной камерой, установленной на продольной оси летательного аппарата, а его выход связан с входом электронно-лучевой трубки, в корабельной части посадочный радиолокационный комплекс с вычислителем параметров связан с вычислителем запрета посадки, соединенным с линией передачи сигналов управления, которая, в свою очередь, связана с вычислителем экстремальных характеристик, а на оптической системе посадки, стабилизированной по углам дифферента и крена, установлена сигнальная лампа, связанная через релейную схему, соединенную с линией передачи сигналов управления и с выходом вычислителя экстремальных характеристик, с источником питания, в гидравлическом аэрофинишере установлены на тормозных барабанах датчики скорости вращения, выходы которых соединены с вычислителем экстремальных характеристик, другие входы которого связаны с датчиками скоростей тросов аэрофинишера.
| Павленко В.Ф | |||
| Корабельные самолеты | |||
| - М.: Военное изд-во, 1990, с | |||
| Паровоз с приспособлением для автоматического регулирования подвода и распределения топлива в его топке | 1919 |
|
SU272A1 |
| US 5042750 A, 04.05.90 | |||
| Аппарат мембранной экстракции для детоксикации биологических жидкостей | 1987 |
|
SU1456159A1 |
| Белавин Н.И | |||
| Авианосные корабли | |||
| - М.: Патриот, 1990, с.46. | |||
