Изобретение относится к области управления воздушным движением, а именно к посадке летательных аппаратов (ЛА) на взлетно-посадочную полосу (ВПП) и движению по ВПП, и может быть эффективно использовано для аэропортов с большой интенсивностью движения.
Известны способ и аппаратура оповещения экипажа о расположении ЛА относительно взлетно-посадочных полос, реализующие функцию RAAS (Runway Awareness and Advisory System), разработанные и запатентованные фирмой Honeywell [1, 2, 3]. Согласно функции RAAS на конечном участке захода на посадку формируют оповещения о выборе ВПП и расположении ЛА относительно ВПП, при этом оповещения формируются при выполнении определенных условий по дальности до середины входного торца ВПП (или, согласно терминологии [4], до середины посадочного порога, в дальнейшем - до порога ВПП), высоте ЛА над ВПП и заданному диапазону углов снижения.
Вопросы способа формирования оповещения о расположении ЛА относительно ВПП рассмотрены в [1-3] в разных аспектах: программного обеспечения, отображения информации, аппаратуры.
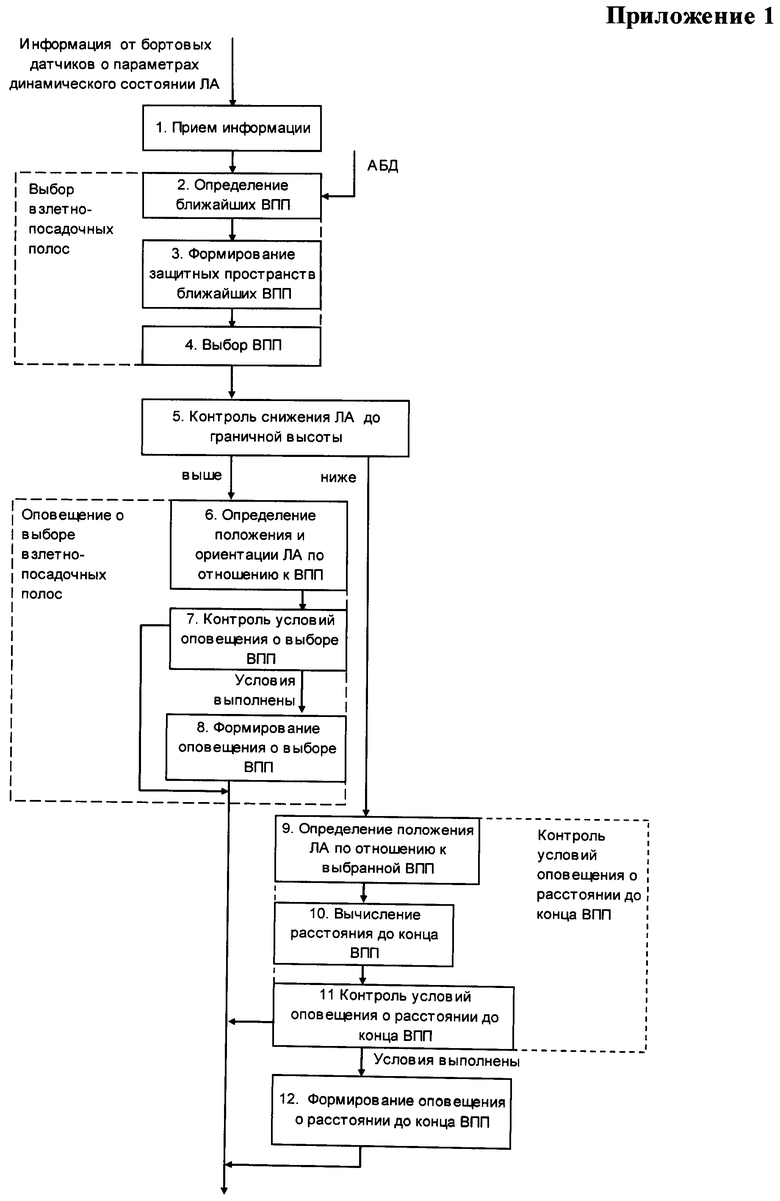
Наиболее общим и близким аналогом является способ, заявленный в [5], который следует считать прототипом заявленного изобретения. В патенте [5] рассмотрены как заход на посадку, так и движение по ВПП после приземления. Согласно [5], последовательность действий способа можно обобщить следующим образом.
Способ оповещения о расположении ЛА относительно взлетно-посадочных полос при заходе на посадку и при движении после приземления состоит в том, что последовательно производят прием информации о параметрах динамического состояния ЛА от его бортовых датчиков, на основе упомянутой информации и аэронавигационной базы данных определяют ближайшие ВПП, формируют защитные пространства для ближайших ВПП и выбирают взлетно-посадочные полосы для захода на посадку, контролируют снижение ЛА до граничной высоты над каждой выбранной ВПП, для тех ВПП, над которыми при снижении ЛА не достигнута граничная высота, последовательно определяют положение и ориентацию ЛА по отношению к выбранным ВПП, контролируют выполнение условий оповещения о выборе взлетно-посадочных полос и, в случае выполнения этих условий, формируют упомянутое оповещение, а при выборе одной ВПП и достижении ЛА граничной высоты, на основании информации от бортовых датчиков и аэронавигационной базы данных, непрерывно рассчитывают расстояние до конца ВПП и после прохождения половины ВПП формируют оповещение об оставшемся расстоянии до конца ВПП.
Схема последовательности действий способа-прототипа приведена в Приложении 1.
Способ [5] усовершенствован в патенте ЗАО «ВНИИРА-Навигатор» [6] с целью повышения надежности посадки ЛА путем формирования адаптированного к типу ЛА оповещения о выборе взлетно-посадочных полос, формирования предупреждения об отклонениях положения ЛА от заданной траектории и об отклонениях прогнозируемой точки посадки от заданной точки посадки.
Для этого после выбора ВПП для каждой из них рассчитывают заданную траекторию захода на посадку, исходя из высоты прохождения ЛА заданного расстояния от порога ВПП, формируют уточненное защитное пространство для каждой ВПП на основе допустимых углов наклона заданных траекторий захода на посадку для данного типа ЛА, подтверждают выбор каждой ВПП для захода на посадку и в случае подтверждения этого выбора осуществляют упомянутые определение положения и ориентации ЛА по отношению к выбранным ВПП, контроль выполнения условий оповещения и формирование оповещения о выборе взлетно-посадочных полос, при этом после приема информации от бортовых датчиков параллельно и непрерывно формируют прогнозируемую траекторию методом линейной аппроксимации пройденной на переменном интервале времени траектории, причем вычисление величины упомянутого интервала времени непрерывно производят на основе определения по информации от бортовых датчиков параметров турбулентности атмосферы, параметров динамического состояния ЛА, а также данных о динамических возможностях ЛА и характеристиках точности бортовых датчиков, а после проведения контроля снижения ЛА до граничной высоты над каждой выбранной ВПП формируют в случае выбора только одной ВПП сигнал, по которому параллельно и непрерывно с учетом заданной траектории, данных о динамических возможностях ЛА и характеристиках точности бортовых датчиков определяют пространственную зону допустимых отклонений от заданной траектории, затем вычисляют текущие отклонения ЛА от заданной траектории, также по упомянутому сигналу проводят определение прогнозируемой точки посадки путем продления аппроксимированной траектории до пересечения с горизонтальной плоскостью, проходящей через середину порога ВПП, затем вычисляют отклонение прогнозируемой точки посадки от заданной точки посадки, также по упомянутому сигналу вычисляют параметры зоны допустимых отклонений прогнозируемой точки посадки от заданной точки посадки, при этом в случае отсутствия подтверждения выбора взлетно-посадочных полос, а также в случае невыполнения условий упомянутого оповещения о выборе взлетно-посадочных полос формируют предупреждение о недопустимых отклонениях ЛА от заданной траектории и прогнозируемой точки посадки от заданной точки посадки.
Способ [6] также, как и [1, 2, 3] является аналогом заявляемого изобретения.
В способе [6] усовершенствован способ-прототип [5] на этапе полета до достижения граничной высоты. Однако на следующих этапах посадки - полете ниже граничной высоты, приземлении и движении по ВПП - способ-прототип недостаточно надежен в связи с отсутствием определения и отображения с достаточной точностью отклонений ЛА от заданной траектории посадки (далее - заданной глиссады) и от оси ВПП на упомянутых этапах.
Ни в прототипе [5], ни в аналоге [6] не рассматривается вопрос снижения точности определения отклонений ЛА от заданной глиссады в угловых единицах при известной точности датчиков определения координат ЛА, имеющий существенное значение для спутниковых систем посадки, для которых ошибка вычисления упомянутых отклонений ЛА, традиционно отображаемых на приборной доске (например, на приборе навигационном плановом) вертикальной (курсовой) и горизонтальной (глиссадной) планками, растет по мере приближения ЛА к порогу ВПП при неизменных ошибках определения координат ЛА навигационной системой.
Задачей настоящего изобретения является усовершенствование способа [5] для повышения надежности посадки после снижения ЛА ниже граничной высоты, включая пробег по ВПП. Поэтому именно способ [5] является наиболее близким к заявляемому изобретению.
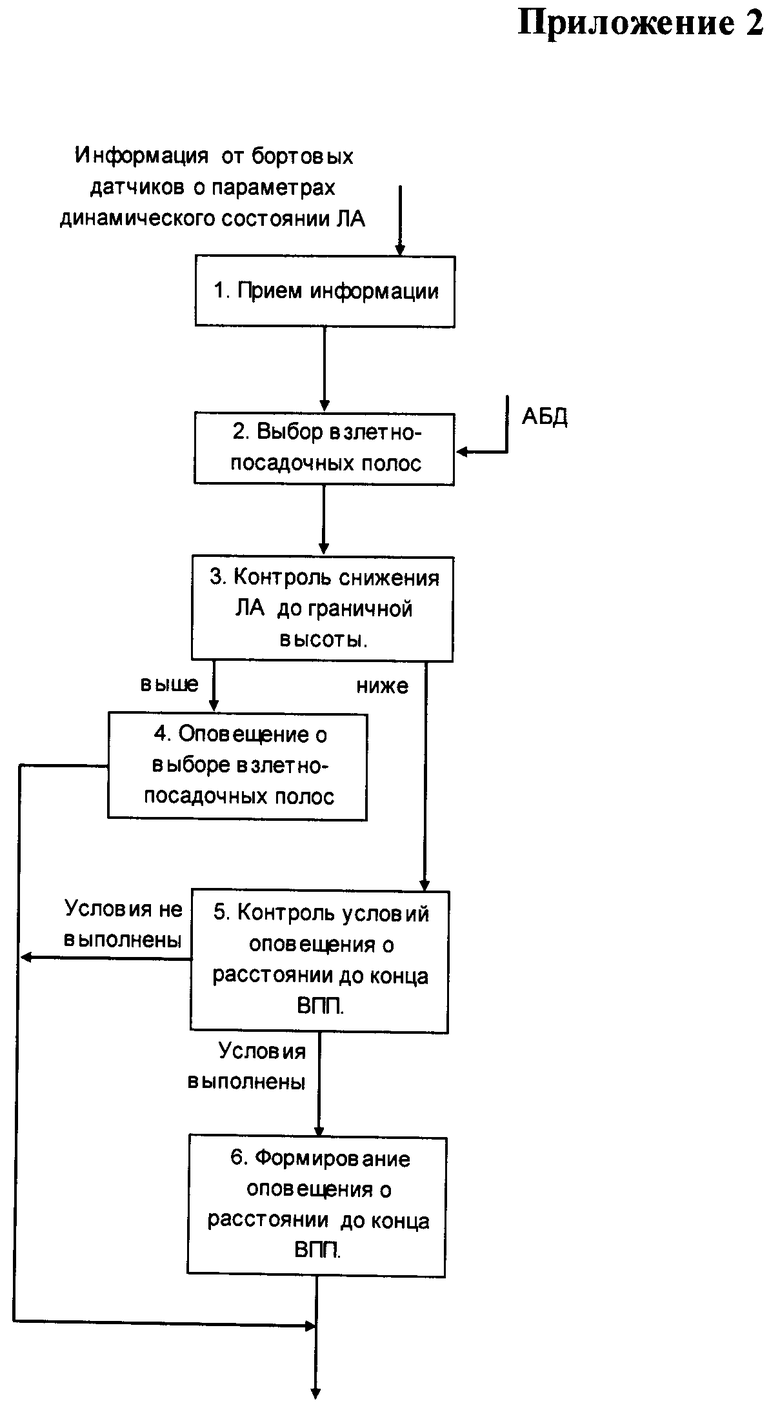
Для сокращения и ясности изложения проведено укрупнение операций способа-прототипа (см. схему последовательности действий в Приложении 2).
Операции «определение ближайших ВПП», «формирование защитных пространств ближайших ВПП», «выбор ВПП» объединены единым наименованием «выбор взлетно-посадочных полос». Операции «определение положения и ориентации ЛА по отношению к ВПП», «контроль выполнения условий оповещения о выборе ВПП» и «формирование оповещения о выборе ВПП» объединены единым наименованием «оповещение о выборе взлетно-посадочных полос». Операции «определение положения ЛА по отношению к выбранной ВПП», «вычисление расстояния до конца ВПП», «контроль условий оповещения о расстоянии до конца ВПП» объединены единым наименованием «контроль условий оповещения о расстоянии до конца ВПП».
С учетом произведенного укрупнения операций (см. Приложения 1, 2) суть заявляемого способа может быть изложена следующим образом.
Способ оповещения о расположении летательного аппарата (ЛА) относительно взлетно-посадочных полос при заходе на посадку и при движении после приземления состоит в том, что последовательно производят прием информации о параметрах динамического состояния ЛА от его бортовых датчиков, на основе упомянутой информации и аэронавигационной базы данных выбирают взлетно-посадочные полосы для захода на посадку, контролируют снижение ЛА до граничной высоты над каждой выбранной взлетно-посадочной полосой, для взлетно-посадочных полос, над которыми при снижении ЛА не достигнута граничная высота, контролируют условия оповещения о выборе взлетно-посадочных полос и в случае выполнения этих условий проводят формирование упомянутого оповещения, а после выбора одной взлетно-посадочной полосы и достижения ЛА упомянутой граничной высоты контролируют условия оповещения о расстоянии до конца взлетно-посадочной полосы, непрерывно рассчитывая на основании информации от бортовых датчиков и аэронавигационной базы данных упомянутое расстояние, и при выполнении условий оповещения после прохождения половины взлетно-посадочной полосы формируют оповещение об оставшемся расстоянии до конца взлетно-посадочной полосы, при этом непрерывно после приема информации от бортовых датчиков контролируют наличие сигнала «шасси обжато» и в случае отсутствия упомянутого сигнала на основании информации о координатах ЛА от бортовых датчиков, информации от пилота о номере назначенной для посадки взлетно-посадочной полосы и информации аэронавигационной базы данных о параметрах упомянутой взлетно-посадочной полосы рассчитывают заданную глиссаду на назначенную взлетно-посадочную полосу, контролируют непревышение допустимого диапазона относительной ошибки вычисления отклонения ЛА от плоскости глиссады в угловых единицах путем определения граничного расстояния до порога взлетно-посадочной полосы, ближе которого упомянутый диапазон относительной ошибки превышает допустимую величину, и слежения за текущим расстоянием до порога взлетно-посадочной полосы, при этом до достижения граничного расстояния ведут определение отклонений ДА от плоскостей курса и глиссады в угловых единицах, а после достижения граничного расстояния переходят к определению упомянутых отклонений в линейных единицах, далее при наличии сигнала «шасси обжато» и с учетом аэронавигационной базы данных, параметров и динамических возможностей ЛА определяют зону допустимых отклонений от оси взлетно-посадочной полосы в линейных единицах, вычисляют боковые отклонения ЛА в линейных единицах от оси взлетно-посадочной полосы, причем в кабине экипажа формируют оповещение об упомянутых отклонениях от заданной глиссады и от оси взлетно-посадочной полосы в виде отображений на приборной панели и на лобовом стекле в идентичных графических ориентирах.
Предлагается граничное расстояние до порога взлетно-посадочной полосы вычислять по формуле:

где ρ - граничное расстояние от ЛА до порога взлетно-посадочной полосы;
 - допустимый диапазон значений относительной ошибки вычисления отклонения ЛА в угловых единицах от плоскости глиссады;
- допустимый диапазон значений относительной ошибки вычисления отклонения ЛА в угловых единицах от плоскости глиссады;
а, b, с, d - коэффициенты аппроксимирующей функции, зависящие от положения глиссады в пространстве и от ошибки определения координат на борту ЛА.
Предлагается диапазон отображения для отклонений в линейных единицах от плоскости глиссады выбирать равным ±15 м, а от плоскости курса выбирать равным ±30 м.
Предлагается до приземления отображение отклонений ЛА от заданной глиссады с переходом от угловых к линейным единицам производить в виде картины, подобной картине отображения отклонений от заданной глиссады, одновременно формируемой на приборной панели, например, на приборе навигационном плановом, работающем в режиме посадки, в котором боковое отклонение ЛА от плоскости курса отображается положением курсовой планки, а отклонение ЛА от плоскости глиссады отображается положением глиссадной планки.
Предлагается после приземления отображение бокового отклонения ЛА от оси взлетно-посадочной полосы производить в линейных единицах на приборной панели и на лобовом стекле в виде картины, подобной отображению на приборе навигационном плановом, работающем в режиме навигации, в котором боковое отклонение ЛА от оси ВПП отображается положением курсовой планки.
Предлагается ниже граничной высоты и до момента остановки после пробега по взлетно-посадочной полосе на лобовом стекле дополнительно к отображению отклонений ЛА от заданной глиссады и оси взлетно-посадочной полосы отображать вид взлетно-посадочной полосы, соответствующий реальному виду взлетно-посадочной полосы из кабины, при этом в случае нулевого бокового отклонения отображение взлетно-посадочной полосы имеет вид равнобедренной трапеции, ось симметрии которой представляет собой отображение оси взлетно-посадочной полосы, а середина основания которой лежит на одной вертикали с отображением курсовой планки при нулевом боковом отклонении, а в случае ненулевого бокового отклонения отображение взлетно-посадочной полосы имеет вид неравнобедренной трапеции, середина основания которой лежит на одной вертикали с отображением курсовой планки при ненулевом боковом отклонении.
Предлагается по сигналу «шасси обжато» для облегчения управления ЛА при пробеге определять и отображать на лобовом стекле параллельную оси взлетно-посадочной полосы составляющую вектора фактического ускорения и параллельную оси взлетно-посадочной полосы составляющую вектора требуемого ускорения, величина которой определяется из расчета остановки ЛА в пределах длины взлетно-посадочной полосы.
Предлагается при наличии фактического ускорения, соответствующего торможению ЛА при пробеге по взлетно-посадочной полосе, непрерывно определять и отображать на лобовом стекле проекцию на ось взлетно-посадочной полосы расчетной точки остановки ЛА таким образом, чтобы отображение упомянутой проекции расчетной точки остановки при нахождении ее за пределами длины взлетно-посадочной полосы и в пределах длины взлетно-посадочной полосы производилось разным цветом.
Предлагается составляющую вектора фактического ускорения, направленную противоположно посадочному курсу взлетно-посадочной полосы и соответствующую торможению ЛА при пробеге, отображать таким образом, чтобы конец упомянутой составляющей при отображении на лобовом стекле находился на одном горизонтальном уровне с проекцией на ось взлетно-посадочной полосы расчетной точки остановки ЛА, при этом составляющую вектора фактического торможения отображать сплошной стрелкой, а составляющую вектора требуемого торможения - контурной стрелкой.
Предлагается при торможении ЛА составляющую вектора фактического ускорения и проекцию расчетной точки остановки при отображении окрашивать одинаковым цветом, изменяющимся при выходе расчетной точки за пределы длины взлетно-посадочной полосы.
Предлагается в случае внештатной ситуации составляющую вектора фактического ускорения, совпадающую по направлению с посадочным курсом взлетно-посадочной полосы и соответствующую разгону ЛА при пробеге, а также нулевую составляющую, отображаемую точкой и соответствующую равномерному движению ЛА при пробеге, при отображении окрашивают тем же цветом, что и в случае выхода расчетной точки остановки за пределы длины взлетно-посадочной полосы при торможении.
Предлагается на лобовом стекле после прохождения середины взлетно-посадочной полосы отображать с заданным интервалом цифровое значение расстояния до конца взлетно-посадочной полосы.
Предлагается при пробеге по взлетно-посадочной полосе формировать предупреждение о превышении допустимой величины бокового отклонения от оси взлетно-посадочной полосы в линейных единицах, например, в виде речевого сообщения.
Работа способа поясняется с помощью фиг.1-13.
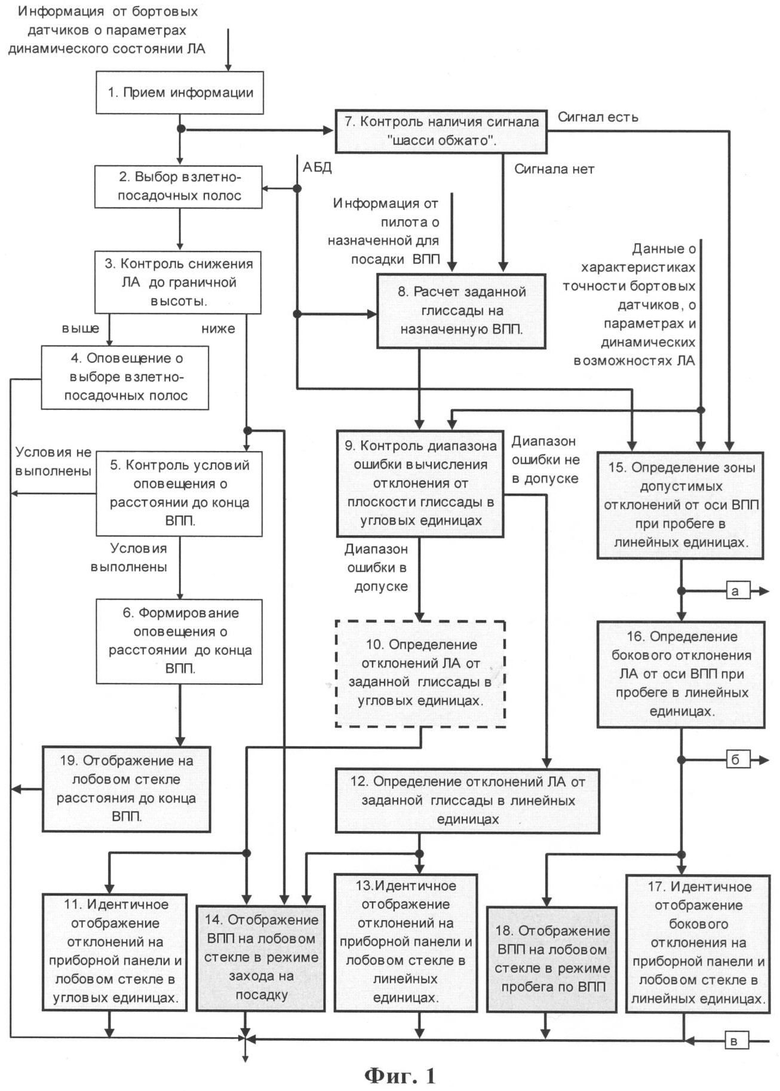
На фиг.1 представлена основная часть схемы последовательности действий способа.
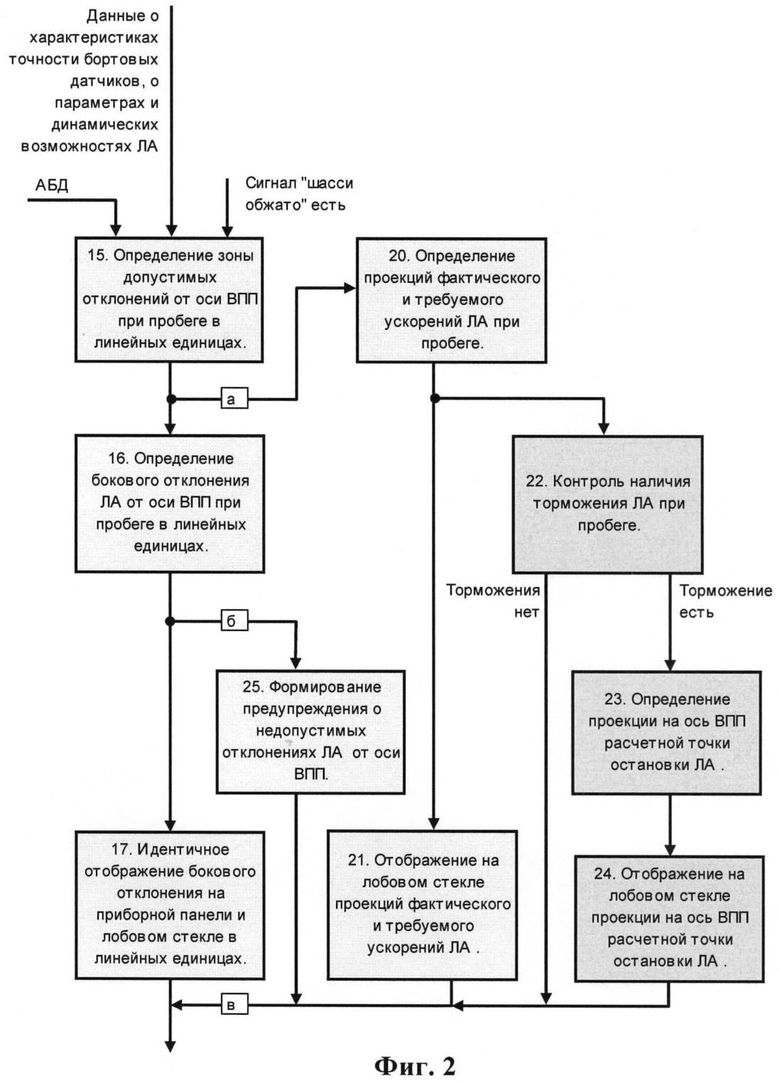
На фиг.2 представлена дополняющая часть схемы последовательности действий способа.
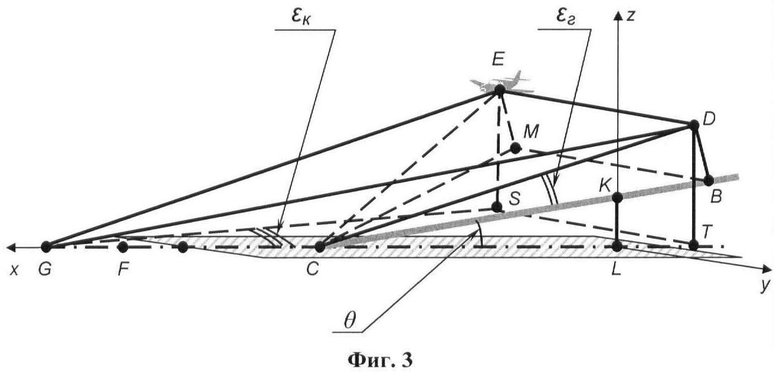
На фиг.3 представлено стереометрическое построение, поясняющее расчет заданной глиссады и способ вычисления отклонений ЛА от заданной глиссады в угловых и линейных единицах (соответственно - угловых и линейных отклонений ЛА от плоскостей курса и глиссады).
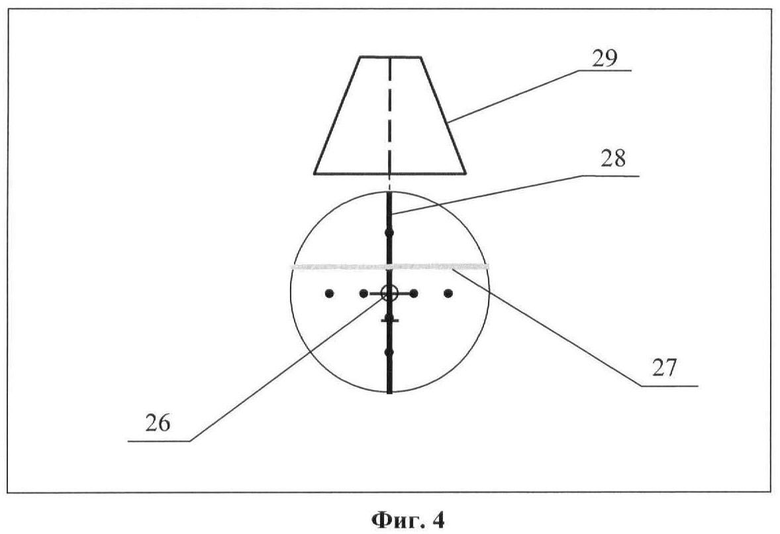
На фиг.4 представлена картина отображения на лобовом стекле при полете ЛА на конечном участке без углового бокового отклонения и с угловым отклонением вниз от заданной глиссады.
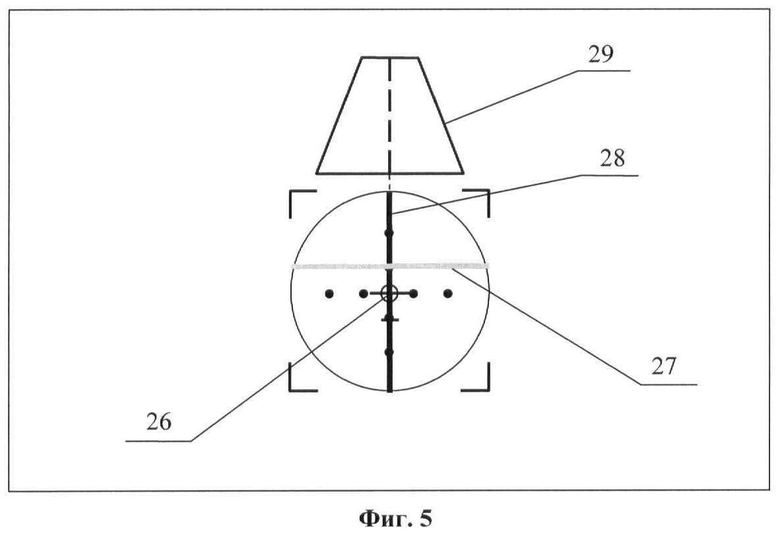
На фиг.5 представлена картина отображения на лобовом стекле при полете ЛА на конечном участке без линейного бокового отклонения и с линейным отклонением вниз от заданной глиссады.
На фиг.6 представлена картина отображения на лобовом стекле при полете ЛА на конечном участке с угловым отклонением влево и вниз от заданной глиссады.
На фиг.7 представлены эмпирические обратные зависимости допустимого диапазона значений относительной ошибки вычисления углового отклонения ЛА от плоскости глиссады (далее ДДО) от расстояния до порога ВПП для расстояний до 10 км при постоянных допустимых значениях среднеквадратических ошибок определения координат навигационной системой ЛА.
На фиг.8 представлены эмпирические обратные зависимости ДДО от расстояния до порога ВПП для расстояний до 3 км при постоянных допустимых значениях среднеквадратических ошибок определения координат навигационной системой ЛА.
На фиг.9 представлена эмпирическая зависимость расстояния от ЛА до порога ВПП от угла наклона глиссады для ДДО, равного 10%, при постоянных допустимых значениях среднеквадратических ошибок определения координат навигационной системой ЛА.
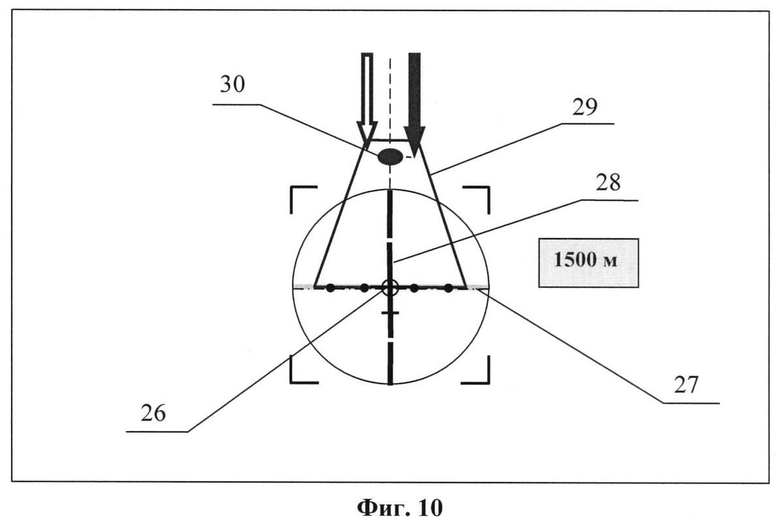
На фиг.10 представлена картина отображения на лобовом стекле при пробеге ЛА с достаточным по величине торможением и нулевым линейным боковым отклонением от оси ВПП.
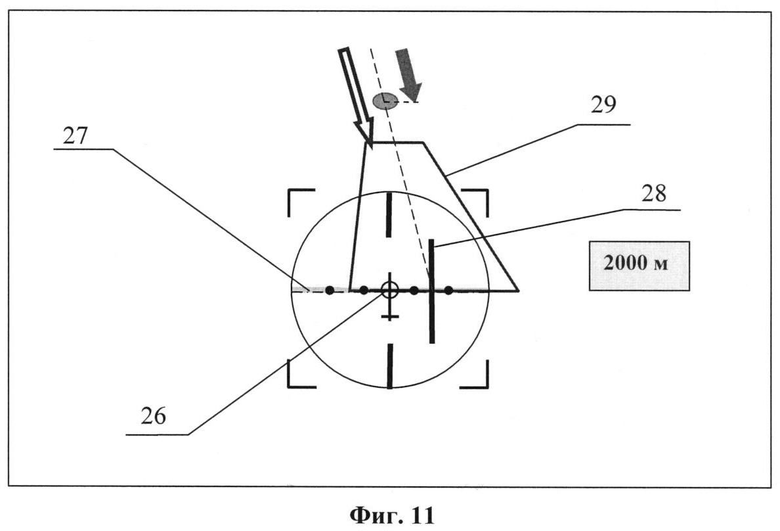
На фиг.11 представлена картина отображения на лобовом стекле при пробеге ЛА с недостаточным по величине торможением и линейным отклонением влево от оси ВПП.
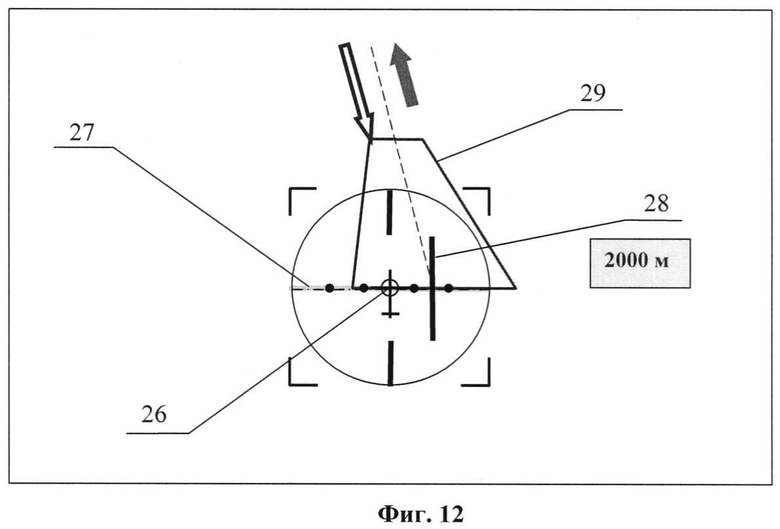
На фиг.12 представлена картина отображения на лобовом стекле при пробеге ЛА с разгоном и линейным отклонением влево от оси ВПП.
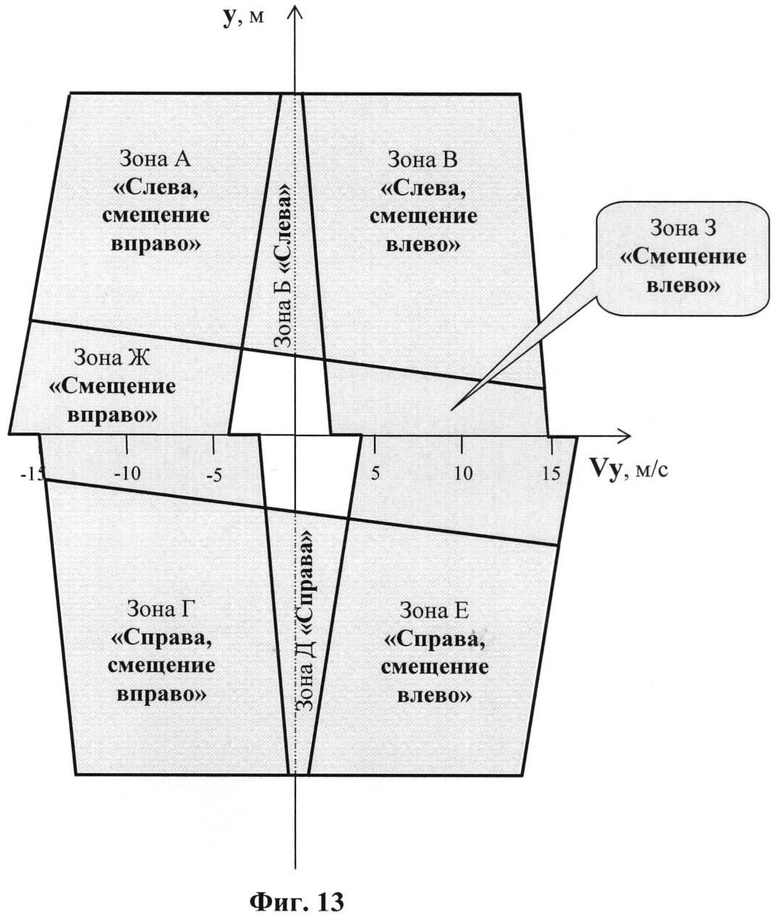
На фиг.13 представлены зоны срабатывания предупреждающей сигнализации о недопустимой величине линейного бокового отклонения от оси ВПП при пробеге в системе координат: линейное боковое отклонение - скорость изменения линейного бокового отклонения.
Схема на фиг.1 включает следующие действия, общие со способом-прототипом (показаны тонкими линиями):
- производят прием информации о параметрах динамического состояния ЛА от его бортовых датчиков 1;
- на основе упомянутой информации и аэронавигационной базы данных осуществляют выбор взлетно-посадочных полос 2;
- контролируют снижение ЛА до граничной высоты 3;
- при нахождении ЛА выше граничной высоты контролируют выполнение условий оповещения и при их выполнении оповещают о выборе взлетно-посадочных полос 4; при этом контроле, помимо упомянутой граничной высоты, вводят зону запрета формирования упомянутого оповещения по высоте, определяемую типом ЛА и обусловленную необходимостью формирования другими системами сообщения о достижении ЛА определенной высоты над ВПП (например, системой предупреждения о возможном столкновении ЛА с рельефом местности);
- в случае подтверждения выбора взлетно-посадочных полос, действия способа непрерывно полностью повторяются до момента снижения ЛА до граничной высоты над каждой выбранной ВПП, ниже которой не производится формирование оповещения о выборе взлетно-посадочных полос;
- при нахождении ЛА ниже граничной высоты контролируются условия оповещения об оставшемся расстоянии до конца ВПП 5 и, при их выполнении, формируется оповещение об упомянутом оставшемся расстоянии в соответствии с заранее известным перечнем значений 6.
Действия 1-6 производятся так же, как и в прототипе [5].
В предлагаемом способе вводятся новые, по сравнению с прототипом [5], действия, выполняемые как выше, так и ниже граничной высоты. При этом на фиг.1 неизвестные ранее действия отображены толстыми сплошными линиями, а действия, известные из аналога [6], изображены толстыми пунктирными линиями. Подчеркнем, что известные из аналога [6] действия реализуются в аналоге только тогда, когда ЛА находится выше граничной высоты, а в заявляемом способе - когда ЛА находится как выше, так и ниже граничной высоты.
Работа по вновь введенным действиям поясняется ниже. Производят проверку наличия сигнала «шасси обжато» (ЛА на земле) 7 и в случае отсутствия этого сигнала производят расчет заданной глиссады на назначенную взлетно-посадочную полосу 8. Заданная глиссада лежит в вертикальной плоскости, проходящей через ось ВПП. Расчет заданной глиссады на назначенную ВПП может быть произведен так же, как и в аналоге [6], на основании данных бортовых датчиков о высоте ЛА на определенном удалении от каждой выбранной ВПП. В заявляемом способе рассматривается также другой возможный вариант расчета заданной глиссады посадки на выбранную ВПП, используемый в спутниковых системах посадки (ССП) и основанный на использовании информации аэронавигационной базы данных о назначенной для посадки ВПП. Основное преимущество такого способа состоит в использовании для каждой ВПП только той глиссады, которая рекомендуется для нее в аэронавигационной базе данных, что обеспечивает сохранение стереотипа в наблюдении экипажем внешних ориентиров подстилающей поверхности при выполнении посадки на конечном участке глиссады.
В ССП для сохранения преемственности характера отображения посадочных сигналов, формируемых инструментальными системами (например, ILS), посадочные сигналы вычисляются пропорционально угловым отклонениям от плоскостей курса и глиссады.
Отображение отклонений на приборной панели, например на приборе навигационном плановом (ПНП), осуществляется таким образом, что положению ЛА соответствует центр экрана. При этом отрицательные значения углового отклонения ЛА от плоскости курса (εк) и углового отклонения от плоскости глиссады (εг) отображаются смещением вертикальной (курсовой) и горизонтальной (глиссадной) планок влево и вверх соответственно.
Представленное на фиг.3 стереометрическое построение поясняет для спутниковых систем посадки способ расчета параметров глиссады и вычисления угловых отклонений от плоскостей курса и глиссады, являющихся аналогами угловых посадочных сигналов систем типа ILS. На фиг.3 использованы следующие обозначения:
- F - точка, определяющая направление оси ВПП;
- G - точка отсчета угловых отклонений от плоскости курса;
- θ - угол наклона глиссады;
- L - точка середины порога ВПП;
- К - опорная точка, определяющая положение глиссады;
- KL - опорная высота, определяющая положение глиссады;
- С - точка пересечения глиссады с горизонтальной плоскостью, проходящей через точку середины порога ВПП;
- Е - точка, в которой находится ЛА;
- εк - угловое отклонение ЛА от плоскости курса;
- εг - угловое отклонение ЛА от плоскости глиссады.
Глиссада задана в неподвижной относительно Земли системе координат OXYZ c началом в центре Земли, ось X которой направлена в точку пересечения экватора и нулевого меридиана, ось Z направлена вдоль оси вращения Земли на Северный полюс, а ось Y дополняет систему до правой тройки векторов. Горизонтальная плоскость FLS является касательной к земному эллипсоиду в опорной точке L.
Плоскость курса LFK, перпендикулярная горизонтальной плоскости FLS, проходит через ось ВПП. Наклонная, по отношению к горизонтальной плоскости, плоскость глиссады ВСМ проходит через линию глиссады и перпендикулярна плоскости курса. Двугранный угол между плоскостью глиссады ВСМ и горизонтальной плоскостью FLS равен углу наклона глиссады θ.
Как было показано в [7] и как видно из фиг.3, угловое отклонение ЛА от плоскости курса можно определить по формуле
где ED - расстояние от точки Е(Х, Y, Z), в которой находится ЛА, до плоскости курса,
SG - катет прямоугольного треугольника ESG с прямым углом S.
Отрицательное значение углового отклонения от плоскости курса соответствует отклонению ЛА вправо по ходу движения, в соответствии с направлениями осей локальной системы координат Lxyz, изображенной на фиг.3, начало которой находится в точке L, направление оси х совпадает с посадочным курсом ВПП, ось z направлена вертикально вверх, а ось y дополняет систему до правой.
Угловое отклонение ЛА от плоскости глиссады определяется по формуле [7]:
где ЕМ - расстояние от точки положения ЛА до плоскости глиссады,
CD - катет прямоугольного треугольника с прямым углом D.
Отрицательное значение углового отклонения от плоскости глиссады соответствует расположению ЛА ниже плоскости глиссады.
После расчета заданной глиссады производят с учетом данных о точности бортовых датчиков контроль непревышения допустимого диапазона относительной ошибки вычисления отклонений от заданной глиссады в угловых единицах 9 и в случае нахождения упомянутого диапазона ошибки в допуске определяют, как и в аналоге [6], текущие отклонения ЛА от заданной глиссады в угловых единицах 10 и производят идентичное отображение упомянутых отклонений на приборной панели и лобовом стекле в угловых единицах 11, а в случае нахождения упомянутого диапазона ошибки вне допуска определяют отклонения ЛА от заданной глиссады в линейных единицах 12 и производят идентичное отображение упомянутых отклонений на приборной панели и лобовом стекле в линейных единицах 13, при этом в обоих упомянутых случаях ниже граничной высоты производят отображение ВПП на лобовом стекле в режиме захода на посадку 14 (см. фиг.4-6).
Рассмотрим более подробно обоснование условий перехода от отображения на приборной панели и лобовом стекле угловых отклонений ЛА от заданной глиссады к отображению линейных отклонений от заданной глиссады.
Угловые отклонения ЛА от плоскостей курса и глиссады при одних и тех же линейных отклонениях ЛА от упомянутых плоскостей увеличиваются по мере приближения ЛА к точкам отсчета этих угловых отклонений, по расположению соответствующих аналогичным точкам отсчета упомянутых угловых отклонений в инструментальной системе посадки типа ILS. Следовательно, наличие постоянных среднеквадратических ошибок (СКО) определения горизонтальных координат и высоты навигационной системой ЛА будет приводить к нарастанию СКО отклонений глиссадной и курсовой планок, точка пересечения которых отображает положение заданной глиссады относительно текущего положения ЛА. Переход от отображения на приборной панели и лобовом стекле угловых отклонений от плоскостей курса и глиссады к отображению линейных отклонений от упомянутых плоскостей (далее - переход в режим отображения линейных отклонений) следует производить одновременно из соображений удобства их использования пилотом в управлении ЛА. Поэтому для определения расстояния, на котором целесообразно переходить в режим отображения линейных отклонений от плоскостей курса и глиссады, с учетом допустимого диапазона значений относительной ошибки вычисления углового отклонения ЛА от плоскости глиссады (далее ДДО), вызванной ошибкой навигационной системы, выполнено статистическое моделирование, выявляющее характер поведения ошибки вычисления угловых отклонений ЛА от плоскостей курса и глиссады в зависимости от расстояния до порога ВПП при постоянных СКО определения координат навигационной системой ЛА. Точка отсчета угловых отклонений от плоскости курса находится дальше от порога ВПП, чем точка отсчета угловых отклонений от плоскости глиссады, поэтому определение расстояния, на котором целесообразно переходить в режим отображения линейных отклонений, выполнено по результатам исследования поведения ДДО.
На фиг.7 представлены зависимости
где ρ - расстояние от ЛА до порога ВПП, км;
где  - величина ДДО, %;
- величина ДДО, %;
 - СКО углового отклонения ЛА от плоскости глиссады, вызванная ошибкой определения высоты навигационной системой ЛА, градусы;
- СКО углового отклонения ЛА от плоскости глиссады, вызванная ошибкой определения высоты навигационной системой ЛА, градусы;
 - половина диапазона отображения угловых отклонений ЛА от плоскости глиссады, градусы.
- половина диапазона отображения угловых отклонений ЛА от плоскости глиссады, градусы.
Величина определяется по формуле [10]

где θ - угол наклона глиссады, градусы.
Результаты статистического моделирования фиг.7 получены для двух значений угла наклона глиссады θ: минимального (2 градуса) и максимального (4 градуса), при этом приняты следующие модели ошибок.
Закон распределения погрешности измерения координат при моделировании принят нормальным, допустимый диапазон ошибки измерения горизонтальных координат спутниковой навигационной системой - равным ±1 м, а допустимый диапазон ошибки измерения высоты - равным ±1,5 м, что соответствует дифференциальному режиму измерения координат спутниковой навигационной системой [8]. Упомянутые допустимые диапазоны ошибок характеризуются доверительной вероятностью 95% [9].
Результаты статистического моделирования фиг.7 аппроксимированы функцией вида

где ρ - расстояние от ЛА до точки посадочного порога ВПП, км;
- величина ДДО;
а, b, с, d - коэффициенты, значения которых приведены в таблице 1.
 для ρ<10 км
для ρ<10 км
Эмпирическая формула (5) позволяет определить расстояние, на котором целесообразно переключаться в режим линейных отклонений от плоскостей курса и глиссады в зависимости от допустимого значения с учетом СКО определения координат навигационной системой ЛА и угла наклона глиссады, определяющего диапазон шкалы, используемой для отображения угловых отклонений ЛА от плоскости глиссады (см. 4).
Зависимости, приведенные на фиг.8, - более точная аппроксимация результатов статистического моделирования для расстояний от ЛА до порога ВПП менее 3 км. Для аппроксимации также использована функция вида (3). Значения коэффициентов а, b, с, d приведены в таблице 2.
для ρ<3 км
При  в дифференциальном режиме измерений СНС расстояние, на котором целесообразно переключаться в режим отображения линейных отклонений, лежит в диапазоне от 625 м до 1238 м в зависимости от угла наклона глиссады, значение которого лежит в диапазоне от 4 до 2 градусов соответственно (фиг.8).
в дифференциальном режиме измерений СНС расстояние, на котором целесообразно переключаться в режим отображения линейных отклонений, лежит в диапазоне от 625 м до 1238 м в зависимости от угла наклона глиссады, значение которого лежит в диапазоне от 4 до 2 градусов соответственно (фиг.8).
Эмпирическая зависимость расстояния от ЛА до порога ВПП от угла наклона глиссады для постоянного значения ДДО, равного 10%, при допустимом значении СКО определения координат навигационной системой приведена на фиг.9. Эта зависимость позволяет определить расстояние, на котором целесообразно переключаться в режим отображения линейных отклонений от плоскостей курса и глиссады с учетом СКО определения координат навигационной системой ЛА и в зависимости от угла наклона глиссады, от которого, в свою очередь, зависит диапазон отображения угловых отклонений (4). Для аппроксимации зависимости фиг.9 использована функция вида

где ρ - расстояние от ЛА до порога ВПП, км;
θ - угол наклона глиссады, от которого зависит диапазон отображения угловых отклонений, градусы;
а, b, с, d - коэффициенты, значения которых приведены в таблице 3.
 σH=0,75 м; σкоорд=…
σH=0,75 м; σкоорд=…
После переключения в режим отображения линейных отклонений отклонение от плоскости курса предлагается вычислять как расстояние ED от ЛА до плоскости курса, а отклонение от плоскости глиссады - как расстояние ЕМ от ЛА до плоскости глиссады (фиг.3). Знаки линейных отклонений соответствуют знакам угловых отклонений, а именно: положение ЛА ниже плоскости глиссады и справа по направлению движения от плоскости курса являются отрицательными.
В момент перехода к отображению линейных отклонений смена шкалы осуществляется таким образом, чтобы глиссадная планка, отклонение которой от центра экрана было пропорционально угловому отклонению, осталась на том же месте экрана. Это достигается пересчетом масштаба отображения отклонений от плоскости глиссады по формуле

где
 - половина диапазона отображения линейных отклонений ЛА от плоскости глиссады, м;
- половина диапазона отображения линейных отклонений ЛА от плоскости глиссады, м;
BCmax - расстояние от точки С пересечения глиссады с осью ВПП до точки В, лежащей на глиссаде (значение будет максимальным при расположении ЛА на глиссаде на граничном расстоянии ρ до порога ВПП, рассчитанном по формуле (6), на момент перехода к отображению линейных отклонений), м;
 - половина диапазона отображения угловых отклонений ЛА от плоскости глиссады, градусы.
- половина диапазона отображения угловых отклонений ЛА от плоскости глиссады, градусы.
Использование величины  зависящей от угла наклона глиссады θ (4) в качестве половины шкалы ПНП для отображения линейного отклонения ЛА от плоскости глиссады приводит к зависимости масштаба отображения от величины θ. В таблице 4 приведены различные значения диапазонов отображения линейного отклонения по высоте для разных значений возможного угла наклона глиссады.
зависящей от угла наклона глиссады θ (4) в качестве половины шкалы ПНП для отображения линейного отклонения ЛА от плоскости глиссады приводит к зависимости масштаба отображения от величины θ. В таблице 4 приведены различные значения диапазонов отображения линейного отклонения по высоте для разных значений возможного угла наклона глиссады.
Как видно из таблицы 4, масштабы отображения линейного отклонения ЛА от заданной глиссады по высоте для разных значений возможного угла наклона глиссады примерно одинаковы, поэтому целесообразно отображать линейные отклонения от глиссады с углом наклона от 2-х до 4-х градусов, характерным для большинства ЛА, в едином масштабе ±15 м.
Половина диапазона отображения линейных отклонений ЛА от плоскости курса вычисляется из условия неподвижности курсовой планки на момент перехода в режим отображения линейных отклонений по формуле:

где GTmax - расстояние от точки G отсчета угловых отклонений от плоскости курса до точки Т (расстояние GT будет максимальным при GT=GS=GTmax, когда ЛА находится на глиссаде на граничном расстоянии ρ до порога ВПП, рассчитанном по формуле (6), в момент перехода в режим отображения линейных отклонений), м;
εкmax - половина диапазона отображения угловых отклонений ЛА от плоскости курса, градусы.
Половина диапазона отображения угловых отклонений ЛА от плоскости курса определяется по формуле [10]
 ,
,
где Cw - ширина курса;
LG - вычисляется как расстояние от точки порога ВПП L(XL, YL, ZL) до точки отсчета углов курса G(XG, YG, ZG) - аналога точки расположения курсового маяка в системе ILS.
Таким образом,

Использование величины ymax, зависящей от расположения точки отсчета угловых отклонений от плоскости курса G, а следовательно, и от длины ВПП, в качестве половины шкалы для отображения линейного отклонения ЛА от плоскости курса приводит к зависимости масштаба отображения от величины LG (9). В таблице 5 приведены соотношения масштабов отображения линейного бокового отклонения, обеспечивающих неподвижность курсовой планки на момент перехода в режим отображения линейных отклонений для минимальной и максимальной длин ВПП, имеющихся в аэронавигационной базе данных.
Как видно из таблицы 5, масштабы отображения бокового линейного отклонения ЛА от заданной глиссады для различных значений возможной длины отрезка LG существенно различаются. Учитывая, что для управления удобно использовать единый масштаб отображения линейного бокового отклонения, не зависящий от длины ВПП, предлагается для отображения линейного бокового отклонения всегда использовать единый диапазон ±30 м, соответствующий максимальной ширине ВПП для большинства аэродромов. При этом в момент перехода в режим отображения линейного отклонения курсовой планкой прибора, отображающей угловое отклонение от плоскости курса, положение курсовой планки в общем случае резко изменится, но при этом курсовая планка останется с той же стороны относительно вертикальной оси симметрии экрана, проходящей через центр экрана, соответствующий отображению положения ЛА, т.е. знак бокового линейного отклонения ЛА от плоскости курса будет таким же, как знак углового отклонения ЛА от этой плоскости.
После приземления ЛА, т.е. при наличии сигнала «шасси обжато», используя данные о динамических возможностях ЛА и характеристиках точности бортовых датчиков, производят определение зоны допустимых отклонений от оси ВПП при пробеге в линейных единицах 15, определяют упомянутое отклонение 16 и производят идентичное отображение бокового отклонения на приборной панели и лобовом стекле в линейных единицах 17 и отображение ВПП на лобовом стекле в режиме пробега по ВПП 18 (фиг.10-12).
На лобовом стекле отображают значения расстояния до конца ВПП 19 (фиг.10-12). Отображаемые значения упомянутого расстояния соответствуют перечню значений, о которых производят речевое оповещение в прототипе [5], причем продолжительность индикации значений расстояния соответствует продолжительности речевого оповещения о них. Подобная мера направлена на повышение надежности информирования экипажа о расстоянии до конца ВПП и может оказаться единственным источником упомянутой информации в случае неполадок в системе бортового речевого информатора.
После определения зоны допустимых отклонений от оси ВПП 15 (см. фиг.2) производят определение проекций на ось ВПП векторов фактического и требуемого ускорения ЛА при пробеге 20 и отображение упомянутых проекций векторов на лобовом стекле 21 (см. фиг.10-12), а также, одновременно с определением упомянутых проекций векторов, производят анализ направления и величины проекции фактического ускорения ЛА на ось ВПП при пробеге 22 и, в случае наличия торможения, производят определение проекции расчетной точки остановки ЛА на ось ВПП 23 и отображение на лобовом стекле упомянутой проекции расчетной точки остановки ЛА 24.
После определения линейного бокового отклонения ЛА от оси ВПП при пробеге 16 с учетом определенной ранее зоны допустимых отклонений от оси ВПП при пробеге 15 при выполнении соответствующих условий соотношения величины линейного бокового отклонения и скорости его изменения (см. фиг.13) производят формирование предупреждения о недопустимых отклонениях ЛА от оси ВПП 25.
Предложенный выше способ позволяет повысить информированность пилота о положении ЛА.
По картинам отображения на фиг.4-6 можно получить информацию о расположении ЛА выше или ниже заданной глиссады и об отклонении ЛА от заданной глиссады в правую или левую стороны. Положение ЛА на картине отражается неподвижным символом в центре экрана 26. Вертикальное смещение ЛА выше или ниже заданной глиссады на картине отражается положением глиссадной планки 27, а боковое смещение ЛА в правую или левую стороны от заданной глиссады отражается положением курсовой планки 28.
При этом перекрестие планок (точка их пересечения) отражает на картине положение заданной глиссады. На участке посадки на ВПП 29 ниже граничной высоты и до момента обжатия шасси индикация на лобовом стекле отклонений ЛА от заданной глиссады производится идентично индикации этих же отклонений на приборной панели, что упрощает задачу попеременного использования летчиком различных индикаторов.
Замена на определенном удалении от порога ВПП индикации отклонений от заданной глиссады в угловых единицах индикацией этих же отклонений в линейных единицах, а также их определение с использованием точных измерений координат ЛА и аэронавигационной базы данных позволяет продлить информативную полезность упомянутых отклонений для управления ЛА вплоть до момента окончания его пробега по ВПП до расчетной точки остановки 30.
Картины отображения на фиг.10-12 информируют:
- о величине бокового отклонения ЛА от оси ВПП при пробеге после обжатия шасси,
- о соотношении величин и цвете проекций векторов требуемого и фактического торможений ЛА вдоль оси ВПП, при этом проекция вектора требуемого торможения отображается неокрашенной стрелкой, направленной вниз, длина которой выбирается так, чтобы горизонтальная линия, проведенная через конец вектора упомянутой проекции, пересекала изображение ВПП на лобовом стекле вблизи отображаемого конца ВПП, а проекция вектора фактического торможения отображается: а) синей стрелкой, направленной вниз, если фактическое торможение вдоль оси ВПП не меньше требуемого; б) красной стрелкой, направленной вниз, если фактическое торможение вдоль оси ВПП меньше требуемого и имеется угроза выкатывания ЛА за пределы длины ВПП; в) красной стрелкой, направленной вверх, если ЛА не тормозится, а разгоняется при движении по ВПП (в случае нештатной ситуации на борту) и расчетная точка остановки не отображается (см. фиг.12); г) никак не отображается, если ЛА движется по ВПП с постоянной скоростью (расчетная точка остановки в этом случае также не отображается),
- о расположении и цвете проекции расчетной точки остановки ЛА на ось ВПП, при этом один из используемых цветов упомянутой точки (например, синий) должен означать отсутствие угрозы выкатывания ЛА за пределы длины ВПП, а другой цвет (например, красный) - наличие подобной угрозы.
Заметим, что проекция расчетной точки остановки ЛА на ось ВПП, располагающаяся за пределами длины ВПП, всегда окрашивается в цвет, обозначающий угрозу выкатывания ЛА за пределы ВПП, например в красный (см. фиг.11), а проекция расчетной точки остановки ЛА, располагающаяся в пределах длины ВПП, всегда окрашивается в цвет, означающий отсутствие угрозы выкатывания за пределы ВПП, например в синий (см. фиг.10), даже если при этом существует опасность выкатывания за пределы ширины ВПП. Опасность выкатывания ЛА за пределы ширины ВПП летчику предлагается оценивать по характеру перемещения курсовой планки положения ЛА относительно оси ВПП, индицируемой при пробеге по ВПП на лобовом стекле и приборной панели, а также по формируемой предупреждающей сигнализации о недопустимом смещении ЛА от оси ВПП при пробеге (см. фиг.13).
Картина отображения на фиг.13 иллюстрирует условия формирования предупреждающей сигнализации о недопустимом линейном боковом отклонении от оси ВПП при пробеге. Нижние границы срабатывания сигнализации зон А, Б, В, Ж, З и верхние границы срабатывания сигнализации зон Г, Д, Е, Ж, З имеют наклон, т.к. если ЛА смещается с увеличением линейного бокового отклонения, то чем больше абсолютная величина составляющей скорости увеличения бокового отклонения ЛА (Vy), тем при меньшей величине линейного бокового отклонения срабатывает сигнализация, предупреждающая о недопустимой величине линейного бокового отклонения, а если ЛА смещается с уменьшением линейного бокового отклонения, то чем больше абсолютная величина составляющей скорости увеличения бокового отклонения ЛА (Vy), тем при большей величине линейного бокового отклонения срабатывает сигнализация, предупреждающая о недопустимой величине линейного бокового отклонения. Зоны Б и Д имеют наклонные боковые границы и несимметричны относительно оси y. Наклон границ зон Б и Д обусловлен тем, что с ростом абсолютной величины линейного бокового отклонения допустимая величина скорости бокового смещения всегда уменьшается, а несимметричность зон Б и Д относительно оси у обусловлена тем, что при смещении ЛА с увеличением линейного бокового отклонения допустима меньшая скорость смещения, чем при смещении ЛА, приводящем к уменьшению линейного бокового отклонения. Положение границ зон срабатывания зависит также от параметров ЛА, его динамических возможностей и характеристик точности бортовых датчиков.
Сигнализация о недопустимом боковом отклонении ЛА от оси ВПП и отображение на лобовом стекле проекций на ось ВПП векторов фактического и требуемого торможений, а также проекции расчетной точки остановки помогут пилоту вовремя оценить параметры движения ЛА при пробеге и, при необходимости, своевременно внести коррективы в управление, требуемые для завершения пробега ЛА в пределах ВПП.
Таким образом, предложенный способ позволяет повысить надежность посадки ЛА, включая пробег по ВПП, путем:
- своевременного перехода от отображения угловых отклонений ЛА от плоскостей курса и глиссады к отображению линейных отклонений ЛА от упомянутых плоскостей;
- отображения на приборной панели и на лобовом стекле в идентичных геометрических ориентирах отклонений ЛА от заданной глиссады до момента обжатия шасси и отклонений ЛА от оси ВПП при пробеге;
- формирования предупреждения о недопустимом боковом отклонении от оси ВПП при пробеге;
- отображения на лобовом стекле озвучиваемых значений оставшегося до конца ВПП расстояния;
- отображения параллельных оси ВПП проекций векторов требуемого и фактического торможения;
- отображения проекции на ось ВПП расчетной точки остановки ЛА.
Экспериментальное подтверждение эффективности предлагаемого способа проведено посредством математического моделирования и анализа результатов летных испытаний.
Математическое моделирование показало, что предложенный способ обеспечивает своевременный (без броска в отклонении глиссадной планки положения) переход от использования (для формирования отклонений планок) отклонений ЛА от заданной глиссады в угловых единицах к использованию упомянутых отклонений в линейных единицах, выполняемый с учетом величины угла наклона глиссады и СКО определения высоты ЛА на борту.
Анализ результатов летных испытаний на самолете Як-42 показал, что использование предложенного способа обеспечивает эффективное использование глиссадной и курсовой планок на приборной панели и их идентичного отображения на лобовом стекле при снижении по глиссаде, в том числе непосредственно перед приземлением, и при пробеге по ВПП до момента остановки ЛА, что повышает надежность выполнения посадки в среднем на 15-20% по сравнению со способом-прототипом.
Обобщение результатов применения предложенного способа для различных типов ЛА позволяет оценить общее повышение безопасности посадки величиной в 10-15% по сравнению с существующими прототипом и аналогами.
Способ найдет применение в аэропортах России, оборудованных контрольными корректирующими станциями, используемыми для реализации ССП.
Литературные источники, принятые во внимание:
1. Патент США №6983206 В2, кл. G08B 23/00, заявл. 15.05.2003 г., опубл. 03.01.2006 г.
2. Патент США №7079951 В2, кл. G01S 13/00, заявл. 10.12.2004 г., опубл. 18.07.2006 г.
3. Патент США №7206698 В2, кл. G06F 17/00, заявл. 10.12.2004 г., опубл. 17.04.2007 г.
4. МВК НГЭ СССР Министерство гражданской авиации СССР Нормы годности к эксплуатации в СССР гражданских аэродромов (НГЭА СССР). Издание третье. - М.: «Воздушный транспорт», 1992.
5. Патент США №7363145 В2, кл. G08G 5/00, заявл. 10.12.2004 г., опубл. 22.04.2008 г.
6. Патент Россия №2410753, кл. G08G 5/04, заявл. 18.12.2009 г., опубл. 27.01.2011 г.
7. Бабуров В.И., Рогова А.А., Соболев С.П. Способ расчета отклонений самолета от курсовой линии и глиссады в бортовом оборудовании спутниковой системы посадки / Научный вестник НГТУ. - 2005. - №1. С.3-10.
8. Соловьев Ю. А. Спутниковая навигация и ее приложения. - М.: Эко-Трендз, 2003.
9. Абезгауз Г.Г. и др. Справочник по вероятностным расчетам. - М., Воениздат, 1970.
10. АВИАЦИОННАЯ ЭЛЕКТРОСВЯЗЬ. Приложение 10 к конвенции о международной гражданской авиации. Том 1. Радионавигационные средства, ИКАО, 2006.
11. Выгодский М.Я. Справочник по высшей математике. - М.: «Наука», 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ | 2009 |
|
RU2410753C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| ТРЕХМЕРНЫЙ ДИСПЛЕЙ БОКОВОГО ОТКЛОНЕНИЯ | 1996 |
|
RU2173660C2 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И БОРТОВОЙ РАДИОЛОКАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2303796C1 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛА В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2601511C1 |
| Система захода и посадки на взлётно-посадочную полосу воздушного судна с бортовой РЛС | 2019 |
|
RU2728208C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |
| СПОСОБ ИНДИКАЦИИ ЛЕТЧИКУ О ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ЗАДАННОЙ ГЛИССАДЫ ПРИ ЗАХОДЕ НА ПОСАДКУ НА КОРАБЛЬ | 2014 |
|
RU2558524C1 |
Изобретение относится к области управления воздушным движением, а именно к области посадки летательных аппаратов (ЛА) на взлетно-посадочную полосу (ВПП). Способ заключается в том, что непрерывно контролируют наличие сигнала «шасси обжато». В случае отсутствия упомянутого сигнала на основании информации о координатах ЛА от бортовых датчиков, информации от пилота о номере назначенной для посадки взлетно-посадочной полосы и информации аэронавигационной базы данных о параметрах взлетно-посадочной полосы рассчитывают заданную глиссаду на назначенную взлетно-посадочную полосу. Контролируют непревышение допустимого диапазона относительной ошибки вычисления отклонения ЛА от плоскости глиссады. До достижения граничного расстояния ведут определение отклонений ЛА от плоскостей курса и глиссады. После достижения граничного расстояния переходят к определению упомянутых отклонений. При наличии сигнала «шасси обжато» и с учетом аэронавигационной базы данных, параметров и динамических возможностей ЛА определяют зону допустимых отклонений от оси взлетно-посадочной полосы. Вычисляют боковые отклонения ЛА от оси взлетно-посадочной полосы. В кабине экипажа формируют оповещение об упомянутых отклонениях в виде отображений на приборной панели и на лобовом стекле в идентичных графических ориентирах. Технический результат заключается в повышении надежности посадки летательного аппарата. 12 з.п. ф-лы, 13 ил.
1. Способ оповещения о расположении летательного аппарата (ЛА) относительно взлетно-посадочных полос при заходе на посадку и при движении после приземления, состоящий в том, что последовательно производят прием информации о параметрах динамического состояния ЛА от его бортовых датчиков, на основе упомянутой информации и аэронавигационной базы данных выбирают взлетно-посадочные полосы для захода на посадку, контролируют снижение ЛА до граничной высоты над каждой выбранной взлетно-посадочной полосой, для взлетно-посадочных полос, над которыми при снижении ЛА не достигнута граничная высота, контролируют условия оповещения о выборе взлетно-посадочных полос и в случае выполнения этих условий проводят формирование упомянутого оповещения, а после выбора одной взлетно-посадочной полосы и достижения ЛА упомянутой граничной высоты контролируют условия оповещения о расстоянии до конца взлетно-посадочной полосы, непрерывно рассчитывая на основании информации от бортовых датчиков и аэронавигационной базы данных упомянутое расстояние, и при выполнении условий оповещения после прохождения половины взлетно-посадочной полосы формируют оповещение об оставшемся расстоянии до конца взлетно-посадочной полосы, отличающийся тем, что непрерывно после приема информации от бортовых датчиков контролируют наличие сигнала «шасси обжато» и в случае отсутствия упомянутого сигнала на основании информации о координатах ЛА от бортовых датчиков, информации от пилота о номере назначенной для посадки взлетно-посадочной полосы и информации аэронавигационной базы данных о параметрах упомянутой взлетно-посадочной полосы рассчитывают заданную глиссаду на назначенную взлетно-посадочную полосу, контролируют непревышение допустимого диапазона относительной ошибки вычисления отклонения ЛА от плоскости глиссады в угловых единицах путем определения граничного расстояния до порога взлетно-посадочной полосы, ближе которого упомянутый диапазон ошибки превышает допустимое значение, и слежения за текущим расстоянием до порога взлетно-посадочной полосы, при этом до достижения граничного расстояния ведут определение вертикального и бокового отклонений ЛА в угловых единицах, а после достижения граничного расстояния переходят к определению упомянутых отклонений в линейных единицах, далее при наличии сигнала «шасси обжато» и с учетом аэронавигационной базы данных, параметров и динамических возможностей ЛА определяют зону допустимых отклонений от оси взлетно-посадочной полосы в линейных единицах, вычисляют боковые отклонения ЛА в линейных единицах от оси взлетно-посадочной полосы, причем в кабине экипажа формируют оповещение об упомянутых отклонениях от заданной глиссады и от оси взлетно-посадочной полосы в виде отображений на приборной панели и на лобовом стекле в идентичных графических ориентирах.
2. Способ по п.1, отличающийся тем, что граничное расстояние до порога взлетно-посадочной полосы вычисляют по формуле:

где ρ - граничное расстояние от ЛА до порога взлетно-посадочной полосы;
Δεг - допустимый диапазон значений относительной ошибки вычисления отклонения ЛА в угловых единицах от плоскости глиссады;
a, b, c, d - коэффициенты аппроксимирующей функции, зависящие от положения глиссады в пространстве и от ошибки определения координат на борту ЛА.
3. Способ по п.1, отличающийся тем, что диапазон отображения для отклонений в линейных единицах от плоскости глиссады выбирают равным ±15 м, а от плоскости курса выбирают равным ±30 м.
4. Способ по п.1, отличающийся тем, что до приземления отображение отклонений ЛА от заданной глиссады с переходом от угловых к линейным единицам производят на лобовом стекле в виде картины, подобной картине отображения отклонений от заданной глиссады, одновременно формируемой на приборной панели, например на приборе навигационном плановом, работающем в режиме посадки, при котором боковое отклонение ЛА от плоскости курса отображается положением курсовой планки, а отклонение ЛА от плоскости глиссады отображается положением глиссадной планки.
5. Способ по п.1, отличающийся тем, что после приземления отображение бокового отклонения ЛА от оси взлетно-посадочной полосы производят в линейных единицах на приборной панели и на лобовом стекле в виде картины, подобной отображению на приборе навигационном плановом, работающем в режиме навигации, при котором боковое отклонение ЛА от оси взлетно-посадочной полосы отображается положением курсовой планки.
6. Способ по п.4 или 5, отличающийся тем, что ниже граничной высоты и до момента остановки после пробега по взлетно-посадочной полосе на лобовом стекле дополнительно к отображению отклонений ЛА от заданной глиссады и оси взлетно-посадочной полосы отображают вид взлетно-посадочной полосы, соответствующий реальному виду взлетно-посадочной полосы из кабины, при этом в случае нулевого бокового отклонения отображение взлетно-посадочной полосы имеет вид равнобедренной трапеции, ось симметрии которой представляет собой отображение оси взлетно-посадочной полосы, а середина основания которой лежит на одной вертикали с отображением курсовой планки при нулевом боковом отклонении, а в случае ненулевого бокового отклонения отображение взлетно-посадочной полосы имеет вид неравнобедренной трапеции, середина основания которой лежит на одной вертикали с отображением курсовой планки при ненулевом боковом отклонении.
7. Способ по п.1, отличающийся тем, что по сигналу «шасси обжато» для облегчения управления ЛА при пробеге определяют и отображают на лобовом стекле параллельную оси взлетно-посадочной полосы составляющую вектора фактического ускорения и параллельную оси взлетно-посадочной полосы составляющую вектора требуемого ускорения, величина которой определяется из расчета остановки ЛА в пределах длины взлетно-посадочной полосы.
8. Способ по п.7, отличающийся тем, что при наличии фактического ускорения, соответствующего торможению ЛА при пробеге по взлетно-посадочной полосе, непрерывно определяют и отображают на лобовом стекле проекцию на ось взлетно-посадочной полосы расчетной точки остановки ЛА таким образом, чтобы отображение упомянутой проекции расчетной точки остановки при нахождении ее за пределами длины взлетно-посадочной полосы и в пределах длины взлетно-посадочной полосы производилось разным цветом.
9. Способ по п.8, отличающийся тем, что составляющую вектора фактического ускорения, соответствующую торможению ЛА при пробеге по взлетно-посадочной полосе, отображают на лобовом стекле таким образом, чтобы конец упомянутой составляющей находился на одном горизонтальном уровне с проекцией на ось взлетно-посадочной полосы расчетной точки остановки ЛА, при этом составляющую вектора фактического ускорения отображают сплошной стрелкой, а составляющую вектора требуемого ускорения - контурной стрелкой.
10. Способ по п.9, отличающийся тем, что при торможении ЛА составляющую вектора фактического ускорения и проекцию расчетной точки остановки при отображении окрашивают одинаковым цветом, изменяющимся при выходе расчетной точки за пределы длины взлетно-посадочной полосы.
11. Способ по п.7 или 8, отличающийся тем, что в случае внештатной ситуации составляющую вектора фактического ускорения, соответствующую разгону ЛА при пробеге, а также нулевую составляющую, отображаемую точкой и соответствующую равномерному движению ЛА при пробеге, при отображении окрашивают тем же цветом, что и в случае выхода расчетной точки остановки за пределы длины взлетно-посадочной полосы при торможении.
12. Способ по п.1, отличающийся тем, что на лобовом стекле после прохождения середины взлетно-посадочной полосы отображают с заданным интервалом цифровое значение расстояния до конца взлетно-посадочной полосы.
13. Способ по п.1, отличающийся тем, что при пробеге по взлетно-посадочной полосе формируют предупреждение о превышении допустимой величины бокового отклонения от оси взлетно-посадочной полосы в линейных единицах, например, в виде речевого сообщения.
| US 2005192738 A1, 01.09.2005 | |||
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ | 2009 |
|
RU2410753C1 |
| ВСПОМОГАТЕЛЬНОЕ ПОСАДОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2184993C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |

