Изобретение относится к измерительной технике, в частности к пеленгаторам.
Известно устройство для определения направления [1], содержащее электронно-лучевую трубку, последовательно соединенные первые магнитную антенну, полосовой фильтр, усилитель, синхронный детектор и формирователь сигналов, последовательно соединенные вторые магнитную антенну, полосовой фильтр, усилитель, синхронный детектор и формирователь сигналов, последовательно соединенные электрическую антенну, третий полосовой фильтр, третий усилитель, фазовращатель и ограничитель, причем выходы последнего подключены ко вторым входам первого и второго синхронных детекторов, а выходы формирователей сигналов подключены к электронно-лучевой трубке.
Это устройство не обеспечивает возможности селекции источников сигналов по ширине излучаемого спектра.
Наиболее близким техническим решением к предлагаемому является устройство для определения направления на источник сигналов [2], содержащее последовательно соединенные первые магнитную антенну, усилитель, режекторный фильтр, фильтр нижних частот и аналого-цифровой преобразователь (АЦП), последовательно соединенные вторые магнитную антенну, усилитель, режекторный фильтр, фильтр нижних частот и аналого-цифровой преобразователь, последовательно соединенные третьи электрическую антенну, усилитель, режекторный фильтр, фильтр нижних частот и аналого-цифровой преобразователь, а также персональную электронно-вычислительную машину (ПЭВМ), первый, второй и третий фильтры верхних частот, подключенные, соответственно, выходами к четвертому, пятому и шестому АЦП, а входами, соответственно, ко входам первого, второго и третьего фильтров нижних частот, первый и второй калибраторы, связанные, соответственно, с электрической антенной и магнитными антеннами, а входами подключенные к генератору низкочастотных сигналов, причем выходы первого, второго, третьего, четвертого, пятого и шестого АЦП подключены к ПЭВМ. Устройство обеспечивает определение направления на источник сигнала посредством вычисления угла прихода сигнала по отношению сигналов двух взаимно перпендикулярных магнитных антенн, расположенных в горизонтальной плоскости.
Недостатком прототипа является отсутствие возможности уменьшения помех от посторонних источников сигналов при регистрации кратковременных полезных сигналов. В частности, при пеленгации и регистрации молниевых разрядов в полосу принимаемых частот попадают сигналы некоторых служебных радиостанций (например, сигналы американской навигационной системы «Омега», имеющей передатчики во многих местах земного шара). Так как амплитуда такого сигнала непредсказуема, искажения полезного сигнала при наличии такой помехи трудно учитывать. В этом случае целесообразно вырезать из полосы пропускания устройства участок частот помехи, так как провал в амплитудно-частотной характеристике легче поддается учету при анализе полезного сигнала.
Техническим результатом, обеспечиваемым заявляемым изобретением, является уменьшение помех при регистрации кратковременных полезных сигналов путем предварительного поиска и режекции частот источников помех.
Технический результат достигается тем, что устройство для определения направления на источник сигналов, содержащее последовательно соединенные первые режекторный фильтр и фильтр нижних частот, последовательно соединенные вторые режекторный фильтр и фильтр нижних частот, последовательно соединенные третьи режекторный фильтр и фильтр нижних частот, первый, второй и третий усилители, первый, второй и третий аналого-цифровые преобразователи (АЦП), первый, второй и третий приемники сигналов, персональную электронно-вычислительную машину (ПЭВМ или микропроцессор), а также первый и второй калибраторы, связанные, соответственно, с первым и третьим приемниками сигналов, причем выходы первого, второго и третьего АЦП подключены к ПЭВМ, дополнительно содержит последовательно соединенные тактовый генератор, линию задержки, сумматор и синтезатор частоты, последовательно соединенные первую схему «И» и первый регистр, последовательно соединенные вторую схему «И» и второй регистр, последовательно соединенные первый смеситель и первый узкополосный фильтр, последовательно соединенные второй смеситель и второй узкополосный фильтр, последовательно соединенные третий смеситель и третий узкополосный фильтр, последовательно соединенные антенный блок системы единого времени и синхронизатор, подключенный к ПЭВМ, блок связи с абонентами, подключенный к ПЭВМ, третий калибратор, связанный со вторым приемником сигналов и подключенный входом к ПЭВМ, третью схему «И», первый синхронный детектор, второй синхронный детектор, ограничитель, фазовращатель, детектор, последовательно соединенные первый управляемый фильтр, второй управляемый фильтр, четвертый усилитель и четвертый АЦП, последовательно соединенные третий управляемый фильтр, четвертый управляемый фильтр, пятый усилитель и пятый АЦП, последовательно соединенные пятый управляемый фильтр, шестой управляемый фильтр, шестой усилитель и шестой АЦП, первый, второй, третий, четвертый, пятый и шестой ключи, входами подключенные к ПЭВМ, а выходами подключенные, соответственно, к первому, второму, третьему, четвертому, пятому и шестому управляемым фильтрам, а также счетчик, подключенный входами к ПЭВМ, первым выходом подключенный к первой схеме «И», а вторым выходом подключенный ко второй и третьей схемам «И», причем первый, второй и третий усилители подключены входами, соответственно, к первому, второму и третьему узкополосным фильтрам, а выходами подключены, соответственно, к первому синхронному детектору, второму синхронному детектору и к фазовращателю, последний подключен выходом к ограничителю и к детектору, подключенному выходом к третьему аналого-цифровому преобразователю, входы первого, второго и третьего смесителей подключены, соответственно, к первому, второму и третьему фильтрам нижних частот, выходы первого и второго синхронных детекторов подключены, соответственно, к первому и второму АЦП, выход ограничителя подключен ко вторым входам первого и второго синхронных детекторов, выходы первого, второго и третьего приемников сигналов подключены, соответственно, к первому, второму и третьему режекторным фильтрам, выходы синтезатора частоты подключены к первому, второму и третьему смесителям, первый и второй калибраторы подключены входами к ПЭВМ, тактовый генератор подключен к ПЭВМ и ко второму входу второй схемы «И», второй регистр подключен к ПЭВМ и выходом подключен к сумматору, связанному с ПЭВМ, первый регистр подключен к ПЭВМ и выходами подключен ко вторым входам третьей схемы «И», подключенной выходами к сумматору, выход второй схемы «И» подключен ко второму входу первой схемы «И», входы первого, третьего и пятого управляемых фильтров подключены, соответственно, к первому, второму и третьему фильтрам нижних частот, а выходы четвертого, пятого и шестого АЦП, и управляющие входы управляемых фильтров подключены к ПЭВМ.
Такое выполнение устройства для определения направления обеспечивает возможность предварительного сканирования диапазона частот, селекции мешающих источников сигналов по амплитуде и ширине излучаемого спектра с помощью узкополосных каналов приема сигналов, настройки фильтров и режекции мешающих сигналов в основных, широкополосных каналах приема сигналов, и определения направления на кратковременный полезный сигнал в диапазоне частот с удаленными частотами мешающих сигналов.
На чертеже представлена структурная схема предлагаемого устройства.
Принятые обозначения:
1 - первый режекторный фильтр; 2 - первый фильтр нижних частот; 3 - второй режекторный фильтр; 4 - второй фильтр нижних частот; 5 - третий режекторный фильтр; 6 - третий фильтр нижних частот; 7 - первый усилитель; 8 - второй усилитель; 9 - третий усилитель; 10 - первый аналого-цифровой преобразователь; 11 - второй аналого-цифровой преобразователь; 12 - третий аналого-цифровой преобразователь; 13 - первый приемник сигналов; 14 - второй приемник сигналов; 15 - третий приемник сигналов; 16 - персональная электронно-вычислительная машина (ПЭВМ); 17 - первый калибратор; 18 - второй калибратор; 19 - тактовый генератор; 20 - линия задержки; 21 - сумматор; 22 - синтезатор частоты; 23 - первая схема «И»; 24 - первый регистр; 25 - вторая схема «И»; 26 - второй регистр; 27 - первый смеситель; 28 - первый узкополосный фильтр; 29 - второй смеситель; 30 - второй узкополосный фильтр; 31 - третий смеситель; 32 - третий узкополосный фильтр; 33 - антенный блок; 34 - синхронизатор; 35 - блок связи; 36 - третий калибратор; 37 - третья схема «И»; 38 - первый синхронный детектор; 39 - второй синхронный детектор; 40 - ограничитель; 41 - фазовращатель; 42 - детектор; 43 - первый управляемый фильтр; 44 - второй управляемый фильтр; 45 - четвертый усилитель; 46 - четвертый АЦП: 47 - третий управляемый фильтр; 48 - четвертый управляемый фильтр; 49 - пятый усилитель; 50 - пятый АЦП; 51 - пятый управляемый фильтр; 52 - шестой управляемый фильтр; 53 - шестой усилитель; 54 - шестой АЦП; 55 - первый ключ; 56 - второй ключ; 57 - третий ключ; 58 - четвертый ключ; 59 - пятый ключ; 60 - шестой ключ; 61 - счетчик.
Устройство для определения направления на источник сигналов содержит последовательно соединенные первый режекторный фильтр 1 и первый фильтр нижних частот 2, последовательно соединенные второй режекторный фильтр 3 и второй фильтр нижних частот 4, последовательно соединенные третий режекторный фильтр 5 и третий фильтр нижних частот 6, первый усилитель 7, второй усилитель 8 и третий усилитель 9, первый аналого-цифровой преобразователь (АЦП) 10, второй аналого-цифровой преобразователь 11, третий аналого-цифровой преобразователь 12, первый приемник сигналов 13, второй приемник сигналов 14 и третий приемник сигналов 15, персональную электронно-вычислительную машину (ПЭВМ или микропроцессор) 16, первый калибратор 17 и второй калибратор 18, связанные, соответственно, с первым и третьим приемниками сигналов, причем выходы первого, второго и третьего АЦП подключены к ПЭВМ, последовательно соединенные тактовый генератор 19, линию задержки 20, сумматор 21 и синтезатор частоты 22, последовательно соединенные первую схему «И» 23 и первый регистр 24, последовательно соединенные вторую схему «И» 25 и второй регистр 26, последовательно соединенные первый смеситель 27 и первый узкополосный фильтр 28, последовательно соединенные второй смеситель 29 и второй узкополосный фильтр 30, последовательно соединенные третий смеситель 31 и третий узкополосный фильтр 32, последовательно соединенные антенный блок 33 системы единого времени (например «GPS» или «Глонасс») и синхронизатор 34, подключенный к ПЭВМ, блок связи 35 с абонентами, подключенный к ПЭВМ, третий калибратор 36, связанный со вторым приемником сигналов и подключенный входом к ПЭВМ, третью схему «И» 37, первый синхронный детектор 38, второй синхронный детектор 39, ограничитель 40, фазовращатель 41, детектор 42, последовательно соединенные первый управляемый фильтр 43, второй управляемый фильтр 44, четвертый усилитель 45 и четвертый АЦП 46, последовательно соединенные третий управляемый фильтр 47, четвертый управляемый фильтр 48, пятый усилитель 49 и пятый АЦП 50, последовательно соединенные пятый управляемый фильтр 51, шестой управляемый фильтр 52, шестой усилитель 53 и шестой АЦП 54, первый ключ 55, второй ключ 56, третий ключ 57, четвертый ключ 58, пятый ключ 59 и шестой ключ 60, входами подключенные к ПЭВМ 16, а выходами подключенные, соответственно, к первому, второму, третьему, четвертому, пятому и шестому управляемым фильтрам, а также счетчик 61, подключенный входами к ПЭВМ, первым выходом подключенный к первой схеме «И», а вторым выходом подключенный ко второй и третьей схемам «И», причем первый, второй и третий усилители 7, 8, 9 подключены входами, соответственно, к первому, второму и третьему узкополосным фильтрам 28, 30, 32, а выходами подключены, соответственно, к первому синхронному детектору 38, второму синхронному детектору 39 и к фазовращателю 41, последний подключен выходом к ограничителю 40 и к детектору 42, подключенному выходом к третьему аналого-цифровому преобразователю 12, входы первого, второго и третьего смесителей подключены, соответственно, к первому, второму и третьему фильтрам нижних частот, выходы первого и второго синхронных детекторов подключены, соответственно, к первому и второму АЦП, выход ограничителя подключен ко вторым входам первого и второго синхронных детекторов, выходы первого, второго и третьего приемников сигналов подключены, соответственно, к первому, второму и третьему режекторным фильтрам, выходы синтезатора частоты подключены к первому, второму и третьему смесителям, первый и второй калибраторы подключены входами к ПЭВМ 16, тактовый генератор 19 подключен к ПЭВМ 16 и ко второму входу второй схемы «И», второй регистр 26 подключен к ПЭВМ 16 и выходом подключен к сумматору 21, связанному с ПЭВМ 16, первый регистр 24 подключен к ПЭВМ 16 и выходами подключен ко вторым входам третьей схемы «И», подключенной выходами к сумматору 21, выход второй схемы «И» подключен ко второму входу первой схемы «И», входы первого, третьего и пятого управляемых фильтров подключены, соответственно, к первому, второму и третьему фильтрам нижних частот, а выходы четвертого, пятого и шестого АЦП, и управляющие входы управляемых фильтров подключены к ПЭВМ 16.
Устройство для определения направления на источник сигналов работает следующим образом. В начале работы первый регистр 24, второй регистр 26, сумматор 21 и счетчик 61 обнулены. При использовании в качестве первого и второго приемников сигналов активных магнитных антенн радиосигналы поступают на первую антенну 13, принимающую магнитную компоненту сигнала в направлении Север - Юг, на вторую антенну 14, принимающую магнитную компоненту сигнала в направлении Запад - Восток, и на третий приемник сигналов, в качестве которого используется электрическая активная антенна 15, принимающая электрическую компоненту сигнала и имеющая круговую диаграмму направленности. Сигналы с выхода первой магнитной антенны 13 через первый режекторный фильтр 1 и первый фильтр нижних частот 2 поступают на первый смеситель 27 вместе с сигналом, поступающим с выхода синтезатора частоты 22, преобразуются в промежуточную частоту с полосой, определяемой первым узкополосным фильтром 28, усиливаются первым усилителем 7, детектируются первым синхронным детектором 38, преобразуются в цифровую информацию в первом АЦП 10 и поступают в ПЭВМ 16. Аналогичным образом вторым смесителем 29, вторым узкополосным фильтром 30, вторым усилителем 8, вторым синхронным детектором 39, вторым АЦП 11 преобразуются и поступают в ПЭВМ 16 сигналы с выхода второй магнитной антенны 14. Сигналы с выхода третьей электрической антенны 15 через третий режекторный фильтр 5 и третий фильтр нижних частот 6 поступают на третий смеситель 31 вместе с сигналом, поступающим с выхода синтезатора частоты 22, преобразуются в промежуточную частоту с полосой, определяемой третьим узкополосным фильтром 32, усиливаются третьим усилителем 9, корректируются фазовращателем 41, детектируются детектором 42, преобразуются в цифровую информацию в третьем АЦП 12 и поступают в ПЭВМ 16. Одновременно сигналы с выхода фазовращателя 41 через ограничитель 40 поступают на вторые входы первого и второго синхронных детекторов. При превышении заданной величины сигналом от любой из указанных трех антенн ПЭВМ 16 начинает цикл управления приемом и обработкой информации с частотой, определяемой тактовым генератором 19. В начале цикла ПЭВМ 16 засылает во второй регистр 26 начальное значение числа n, которое, умноженное на шаг изменения частоты синтезатора частоты 22, задает прием начальной частоты диапазона, в пределах которого будет производиться сканирование. Импульсы с выхода тактового генератора 19 поступают на второй регистр 26 через вторую схему «И» 25 и через линию задержки 20 в сумматор 21, где разрешают операцию вычитания из содержимого второго регистра 26 содержимого первого регистра 24, уменьшенного вдвое путем пересылки числа со сдвигом, без младшего разряда. В начале цикла это число равно нулю, а в процессе сканирования соответствует половине ширины спектра радиосигнала источника. Результат операции поступает на синтезатор частоты 22 и задает частоту, изменяющуюся с каждым тактом на заданный шаг и поступающую на первый смеситель 27, второй смеситель 29 и третий смеситель 31. Счетчик 61 в нулевом состоянии запрещает прохождение импульсов тактового генератора 19 через первую схему «И» 23 в первый регистр 24 и запрещает перенос содержимого первого регистра 24 в сумматор 21. При превышении заданной величины амплитудой радиосигнала, поступающего от любой из трех антенн, ПЭВМ 16 формирует сигнал, поступающий на счетчик 61, который разрешает прохождение импульсов тактового генератора 19 через первую схему «И» 23 в первый регистр 24, но запрещает перенос числа из первого регистра 24 в сумматор 21 с помощью третьей схемы «И» 37. Этот сигнал держится на входе счетчика 61 в течение нескольких тактов, не меняя его состояния. Если в очередном такте наблюдается уменьшение амплитуды радиосигнала ниже заданной величины, счетчик 61 изменяет свое состояние, разрешает перенос содержимого первого регистра 24 в сумматор 21 и запрещает прохождение импульсов тактового генератора 19 через первую схему «И» 23 в первый регистр 24 и через вторую схему «И» 25 во второй регистр 26. В этом случае, после операции вычитания из содержимого второго регистра 26 половины числа из первого регистра 24 на сумматоре 21 будет код, соответствующий приему средней частоты спектра источника радиосигнала. Значения чисел из сумматора 21 и первого регистра 24 вводятся в ПЭВМ 16, где по ним вычисляется средняя частота спектра источника сигнала и ширина спектра. Если ширина спектра больше заданного значения, то полученные результаты игнорируются, а сканирование продолжается, для чего ПЭВМ 16 обнуляет первый регистр 24 и изменяет состояние счетчика 61, разрешая прохождение импульсов тактового генератора через вторую схему «И» 25 и запрещая прохождение сигналов через первую схему «И» 23 и через третью схему «И» 37. Если ширина спектра меньше или равна заданному значению, то по значениям средней частоты сигналов, поступающих в ПЭВМ 16 из первого и второго АЦП подключаются управляемые фильтры 43, 47, 51 путем подачи управляющих сигналов па ключи 55, 57, 59 и устанавливается средняя частота режекции путем подачи сигналов на управляющие входы управляемых фильтров 43, 47, 51. При появлении второго источника мешающего сигнала подключаются управляемые фильтры 44, 48, 52 с помощью ключей 56, 58, 60. В устройстве может быть установлено n управляемых фильтров в зависимости от ширины контролируемого диапазона и ожидаемого числа «блуждающих» источников мешающих сигналов. Режекторные фильтры 1, 3, 5 обеспечивают удаление мешающих сигналов с заведомо известными частотами, например, 50 Гц. Число режекторных фильтров может быть увеличено для удаления сигналов радиовещательных станций или передатчиков с постоянным спектром частот. Таким образом осуществляется удаление частот мешающих сигналов из диапазона частот полезных сигналов. При появлении полезного сигнала производится вычисление направления на источник сигнала, например, по формуле
где А1, А2 - амплитуды сигналов средней частоты, поступающих в ПЭВМ 16 из первого и второго АЦП, соответственно.
Сигналы с выхода электрической антенны используются для сравнения с сигналами, поступающими с выходов магнитных антенн, а также для запуска устройства.
Блок связи 35 обеспечивает передачу цифровой информации потребителям, а синхронизатор 34 обеспечивает прием сигналов систем GPS или Глонасс из антенного блока 33, привязку информации к единому времени и поддержку шкалы времени при отсутствии сигналов от систем GPS или Глонасс.
Предлагаемое устройство позволяет также осуществлять селекцию зон, свободных от радиоизлучения. Для этого достаточно в программе ПЭВМ 16 изменить условие выдачи сигнала в счетчик 61 на обратное, т.е. выдавать его в случае, если сигнал меньше заданного значения.
Предлагаемое устройство может быть также использовано для определения направления и селекции сигналов от источников сигналов другого вида, например, источников звука, сейсмических сигналов, гидроакустических сигналов и других, для чего достаточно использовать в качестве приемников сигналов датчики сигналов другого вида, имеющие требуемые диаграммы направленности.
Таким образом, предлагаемое устройство для определения направления на источник сигналов в сравнении с прототипом обеспечивает возможность предварительного сканирования диапазона частот, селекции мешающих источников сигналов по амплитуде и ширине излучаемого спектра с помощью узкополосных каналов приема сигналов, настройки фильтров и режекции мешающих сигналов в основных, широкополосных каналах приема сигналов, и определения направления на кратковременный полезный сигнал в диапазоне частот с удаленными частотами мешающих сигналов.
Источники информации
1. «Радио-грозо-пеленгатор», опубл. 2006 год, http://detect-ufo.narod.ru/pribor/detect_radio/pelengatr_01.html
2. И.В.Чернова, Г.И.Дружин, «О возможности регистрации по электромагнитному ОНЧ-излучению циклонов Камчатки», ИКИР ДВО РАН (с.Паратунка, Камчатская обл.), опубл. 2004 год, http://data.www.ikir.ru/Old/Russian/Science/2004/2-10.pdf
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2011 |
|
RU2486535C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2012 |
|
RU2486534C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2011 |
|
RU2485535C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2011 |
|
RU2485536C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ И ДАЛЬНОСТИ ДО ИСТОЧНИКА СИГНАЛА | 2014 |
|
RU2559149C1 |
| Устройство для определения местоположения источника сигналов | 2016 |
|
RU2631906C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2545186C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2559746C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2541358C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2545523C1 |
Изобретение относится к измерительной технике, в частности к пеленгаторам. Достигаемый технический результат - уменьшение помех при регистрации кратковременных полезных сигналов путем предварительного поиска и режекции частот источников помех. Технический результат достигается тем, что устройство для определения направления на источник сигналов содержит первые режекторный фильтр и фильтр нижних частот, вторые режекторный фильтр и фильтр нижних частот, третьи режекторный фильтр и фильтр нижних частот, первый, второй и третий усилители, первый, второй и третий аналого-цифровые преобразователи (АЦП), первый, второй и третий приемники сигналов, персональную электронно-вычислительную машину (ПЭВМ или микропроцессор), первый и второй калибраторы, содержит также тактовый генератор, линию задержки, сумматор, синтезатор частоты, первую схему «И», первый регистр, вторую схему «И», второй регистр, первый смеситель, первый узкополосный фильтр, второй смеситель второй узкополосный фильтр, третий смеситель, третий узкополосный фильтр, антенный блок системы единого времени, синхронизатор, блок связи с абонентами, третий калибратор, третью схему «И», первый синхронный детектор, второй синхронный детектор, ограничитель, фазовращатель, детектор, первый управляемый фильтр, второй управляемый фильтр, четвертый усилитель, четвертый АЦП, третий управляемый фильтр, четвертый управляемый фильтр, пятый усилитель, пятый АЦП, пятый управляемый фильтр, шестой управляемый фильтр, шестой усилитель, шестой АЦП, первый, второй, третий, четвертый, пятый и шестой ключи, а также счетчик, определенным образом соединенные между собой. 1 ил.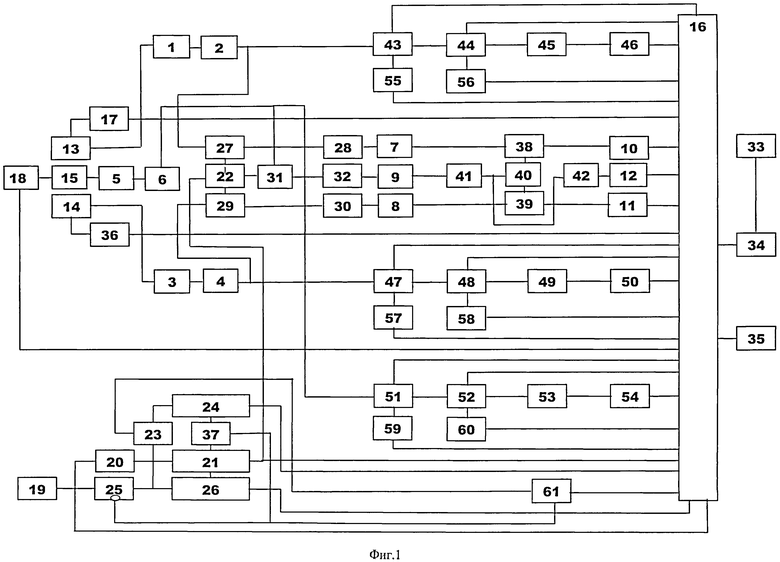
Устройство для определения направления на источник сигналов, содержащее последовательно соединенные первые режекторный фильтр и фильтр нижних частот, последовательно соединенные вторые режекторный фильтр и фильтр нижних частот, последовательно соединенные третьи режекторный фильтр и фильтр нижних частот, первый, второй и третий усилители, первый, второй и третий аналого-цифровые преобразователи (АЦП), первый и второй приемники сигналов с диаграммами направленности, аналогичными магнитным активным антеннам, ориентированные соответственно в направлениях Север-Юг и Запад-Восток, третий приемник сигналов с круговой диаграммой направленности, аналогичной электрической антенне, персональную электронно-вычислительную машину (ПЭВМ или микропроцессор), которая начинает цикл управления приемом и обработкой информации при превышении заданной величины сигналом от любого из указанных трех приемников сигналов, причем при появлении полезного сигнала производится вычисление направления на источник сигналов, а также первый и второй калибраторы, связанные соответственно с первым и третьим приемниками сигналов, причем выходы первого, второго и третьего АЦП подключены к ПЭВМ, отличающееся тем, что дополнительно содержит последовательно соединенные тактовый генератор, линию задержки, сумматор и синтезатор частоты, последовательно соединенные первую схему «И» и первый регистр, последовательно соединенные вторую схему «И» и второй регистр, последовательно соединенные первый смеситель и первый узкополосный фильтр, последовательно соединенные второй смеситель и второй узкополосный фильтр, последовательно соединенные третий смеситель и третий узкополосный фильтр, последовательно соединенные антенный блок системы единого времени и синхронизатор, подключенный к ПЭВМ, блок связи с абонентами, подключенный к ПЭВМ, третий калибратор, связанный со вторым приемником сигналов и подключенный входом к ПЭВМ, третью схему «И», первый синхронный детектор, второй синхронный детектор, ограничитель, фазовращатель, детектор, последовательно соединенные первый управляемый фильтр, второй управляемый фильтр, четвертый усилитель и четвертый АЦП, последовательно соединенные третий управляемый фильтр, четвертый управляемый фильтр, пятый усилитель и пятый АЦП, последовательно соединенные пятый управляемый фильтр, шестой управляемый фильтр, шестой усилитель и шестой АЦП, первый, второй, третий, четвертый, пятый и шестой ключи, входами подключенные к ПЭВМ, а выходами подключенные соответственно к первому, второму, третьему, четвертому, пятому и шестому управляемым фильтрам, а также счетчик, подключенный входами к ПЭВМ, первым выходом подключенный к первой схеме «И», а вторым выходом подключенный ко второй и третьей схемам «И», причем первый, второй и третий усилители подключены входами соответственно к первому, второму и третьему узкополосным фильтрам, а выходами подключены соответственно к первому синхронному детектору, второму синхронному детектору и к фазовращателю, последний подключен выходом к ограничителю и к детектору, подключенному выходом к третьему аналого-цифровому преобразователю, входы первого, второго и третьего смесителей подключены соответственно к первому, второму и третьему фильтрам нижних частот, выходы первого и второго синхронных детекторов подключены соответственно к первому и второму АЦП, выход ограничителя подключен ко вторым входам первого и второго синхронных детекторов, выходы первого, второго и третьего приемников сигналов подключены соответственно к первому, второму и третьему режекторным фильтрам, выходы синтезатора частоты подключены к первому, второму и третьему смесителям, первый и второй калибраторы подключены входами к ПЭВМ, тактовый генератор подключен к ПЭВМ и ко второму входу второй схемы «И», второй регистр подключен к ПЭВМ и выходом подключен к сумматору, связанному с ПЭВМ, первый регистр подключен к ПЭВМ и выходами подключен ко вторым входам третьей схемы «И», подключенной выходами к сумматору, выход второй схемы «И» подключен ко второму входу первой схемы «И», входы первого, третьего и пятого управляемых фильтров подключены соответственно к первому, второму и третьему фильтрам нижних частот, а выходы четвертого, пятого и шестого АЦП и управляющие входы управляемых фильтров подключены к ПЭВМ.
| ЧЕРНЕВА И.В., ДРУЖИН Г.И | |||
| О возможности регистрации по электромагнитному ОНЧ-излучению циклонов Камчатки», ИКИР ДВО РАН (с | |||
| Паратунка, Камчатская обл.), опубл | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| РАЗНЕСЕННЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ ПЕЛЕНГАТОР | 2008 |
|
RU2382378C1 |
| СПОСОБ ОДНОПУНКТОВОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ГРОЗ | 2001 |
|
RU2212685C2 |
| СПОСОБ ОДНОПУНКТОВОГО МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА АТМОСФЕРИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2090903C1 |
| СПОСОБ ПАССИВНОГО РАДИОМОНИТОРИНГА ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2440588C1 |
| WO | |||

