Данное предложение относится к области радиотехники и может быть использовано в широкобазовых комплексах радиомониторинга для определения угловых координат источника радиоизлучения (ИРИ).
Современные системы определения направления на ИРИ построены с использованием известных способов пеленгования: амплитудного (метод максимума, метод минимума, метод сравнения и др.), фазового, частотного и временного.
Известны способы и устройства пеленгования [1-5, 10-20 и другие].
Так, например, известен ряд способов пеленгования, основанных на том, что фазовые соотношения между сигналами, принимаемыми в пространственно разнесенных точках, можно преобразовать в амплитудную зависимость суммы принятых сигналов от местоположения ИРИ.
Наиболее очевидным и широко применяемым является амплитудный способ пеленгования, при котором используется антенная система, имеющая диаграмму направленности с ярко выраженным максимумом. За счет механического изменения положения (ориентации) антенны осуществляется сканирование пространства, в результате чего определяется положение антенны, при котором выходной сигнал антенны имеет максимальную амплитуду, а направление, совпадающее с максимумом диаграммы направленности антенны, принимается за направление на ИРИ.
Этот способ пеленгования можно рассматривать как вырожденный случай разностно-дальномерного способа, когда за счет механического перемещения антенной системы подбирается такое ее положение, чтобы разности дальностей от ИРИ до симметричных точек антенны были равны нулю (а следовательно, и разности фаз сигналов, приходящих в эти точки, были равны нулю). Синфазное сложение сигналов, пришедших по различным траекториям, обеспечивает максимум энергии в точке приема.
Основным недостатком такого способа является необходимость механического перемещения антенной системы или, по крайней мере, ее отдельных элементов (например, облучателя).
Известен также способ пеленгования на основе измерения разности времен приема сигналов от ИРИ двумя разнесенными антеннами [например, 6]. При отклонении положения ИРИ от перпендикуляра к центру базы возникает разность хода сигналов Δr=r1-r2 (r1 и r2 - расстояния от ИРИ до первой и второй антенн соответственно). Относительное запаздывание τ сигналов, вследствие постоянства скорости и прямолинейности распространения радиоволн, пропорционально разности хода
τ=Δr/c.
Значение азимута α ИРИ вычисляется по формуле
α≈arccos(Δr/d),
где d - расстояние между антеннами, при этом
 ,
,
где r=min(r1, r2).
В общем случае, системы, использующие рассмотренный принцип, являются разностно-дальномерными, однако при больших удалениях ИРИ от центра базы, когда расстояние до ИРИ существенно превышает размер базы, гиперболические линии положения, свойственные разностно-дальномерному способу, в дальней зоне практически совпадают с их асимптотами, исходящими в виде лучей из центра базы. В этом случае разностно-дальномерные системы допустимо считать угломерными.
Пеленгование возможно также произвести на основе измерения доплеровского смещения частоты Δf∂ [см., например, 7]. Поскольку
Δf∂=-νr/λ,
где λ - длина волны сигнала ИРИ,
νr - радиальная скорость ИРИ относительно приемной антенны,
то, измеряя Δf∂ на предельно малом интервале, можно получить вариант частотного способа, именуемый доплеровским дифференциальным, который позволяет определить значение углового параметра местоопределения α:
α=2arccos(νr/ν),
где ν - скорость движения ИРИ в системе координат, начало которой совпадает с точкой расположения приемной антенны.
Такой подход к измерению угла основан на допущении о том, что при малых измерительных базах («малых» по сравнению с расстоянием до лоцируемого объекта) гиперболическая поверхность положения асимптотически стремится к конической, форма которой в свою очередь однозначно описывается точкой вершины и углом при основании.
Основными недостатками перечисленных способов является возможность пеленгования ИРИ только в дальней зоне, т.е. при выполнении условия
r>>d,
где r - расстояние до ИРИ;
d - длина измерительной базы.
Выполнение данного условия позволяет принять допущение о плоскости фронта распространения электромагнитной волны.
Известно, что точность определения пеленга ИРИ зависит от величины отношения размера измерительной базы к величине дальности до ИРИ (зависимость характеризуется выражением, учитывающим нижнюю границу Крамера-Рао [6]). Однако значительное увеличение размера измерительной базы приводит к росту систематической погрешности пеленгования, обусловленной сферичностью фронта электромагнитной волны. Величина ошибки пеленгования при значениях дальности r<10d может достигать десяти и более процентов от значения угловой координаты ИРИ. Для снижения погрешности пеленгования используют пеленгационные устройства (например, [20]), в которых систематическая погрешность пеленгования сводится к минимуму за счет учета сферичности волнового фронта.
Из известных способов пеленгования и реализующих их устройств наиболее близким к предлагаемому является способ и реализующее его устройство [20]. Способ [20] предполагает выполнение следующих операций:
- располагают три антенны в вершинах треугольника ΔАВС,
- принимают сигнал ИРИ на все три антенны;
- измеряют разности времен ΔtAC и ΔtBC приема сигнала ИРИ антеннами, размещаемыми в парах точек {А, С} и {В, С} соответственно;
- вычисляют значение γ азимута ИРИ с использованием выражения

где x3=(b2-c2)/a;

a=|AB|/2; b=|AC|/2; с=|BC|/2;
- вычисляют координаты {xf, yf} точки F, принадлежащей линии пеленга ИРИ, с использованием выражений:


где  ,
,
- отображают полученные результаты.
Устройство, реализующее данный способ пеленгования, состоит из трех функционально взаимосвязанных элементов:
- антенной системы, содержащей три антенны;
- системы измерения, содержащей два блока, предназначенные для измерения разностей времен приема сигнала ИРИ парами антенн;
- системы обработки и отображения, содержащей вычислительный блок и блок, осуществляющий визуализацию результатов.
Данное устройство выбрано в качестве прототипа.
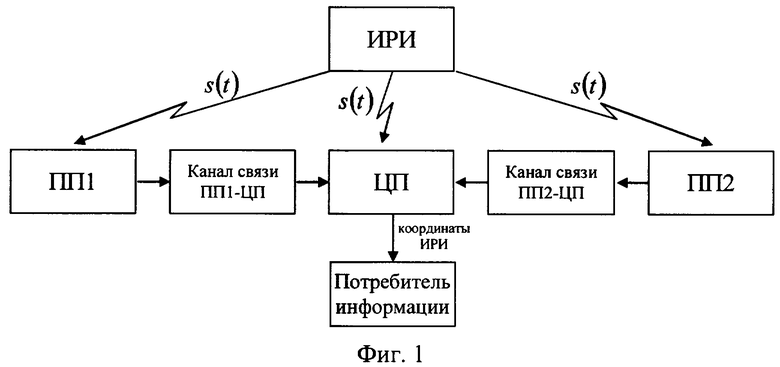
Для повышения точности пеленгования ИРИ расстояния между антеннами необходимо максимизировать. Для этого используют принцип разнесенного приема [21], реализуемый путем создания многопунктной системы, в состав которой входят центральный пункт приема и обработки (ЦП) и периферийные приемные пункты (ПП) (фиг.1).
Основным недостатком многопунктной системы является необходимость наличия каналов связи с большой пропускной способностью для ретрансляции сигналов в аналоговом или цифровом виде с периферийных приемных пунктов на ЦП [21].
В современных условиях широко применяется цифровой прием путем преобразования сигнала на выходе приемной антенны в последовательность мгновенных действующих значений уровня сигнала. Типовые аппаратные средства позволяют вести прием в полосе до 100 МГц и более, что, с одной стороны, обеспечивает возможность одновременного радиомониторинга широкого диапазона частот, а с другой, накладывает ограничения на минимальную ширину полосы пропускания канала связи ПП-ЦП.
Для стационарных систем радиомониторинга необходимая пропускная способность канала ретрансляции обеспечивается за счет применения оптоволоконных линий связи. Для мобильных комплексов радиомониторинга расширение полосы радиоканала ретрансляции для увеличения его пропускной способности ограничено сложившейся плотной загрузкой радиочастного спектра, низкой оперативностью развертывания и сложностью реализации и эксплуатации каналов высокоскоростной передачи данных.
Анализ тенденций развития цифровой техники обработки сигналов свидетельствует об устойчивости роста таких показателей, как разрядность и пропускная способность, что позволяет утверждать о перспективности применения цифровых методов приема и обработки сигналов в однопозиционных комплексах радиомониторинга. Вместе с тем, применительно к многопозиционным системам, данное утверждение на настоящий момент является условным, поскольку нерешенность задачи связи ПП-ЦП, обеспечивающей возможность передачи на ЦП значительных объемов данных, является существенным сдерживающим фактором на пути практической реализации широкобазовых пеленгационных комплексов в интересах решения задач радиомониторинга.
Таким образом, существенным недостатком прототипа является необходимость наличия широкополосных каналов связи между периферийными и центральным пунктами приема сигнала.
Целью изобретения является снятие ограничений на пропускную способность каналов связи между периферийными и центральным пунктами приема сигнала.
Поставленная цель достигается тем, что вместо ретрансляции сигнала с ПП на ЦП передается его значимый (с точки зрения информативности координатометрии) фрагмент.
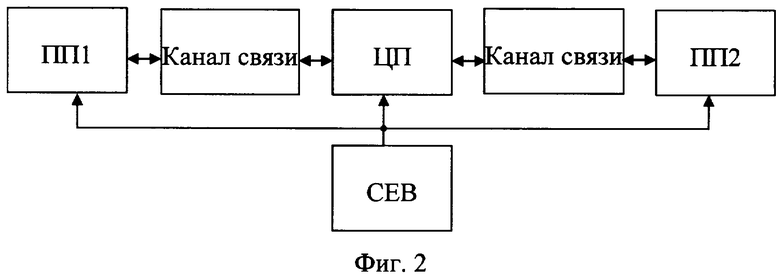
Для этого предлагаемое устройство (фиг.2) состоит из:
- двух периферийных пунктов ПП1 и ПП2;
- ЦП;
- канала связи между ПП1 и ЦП;
- канала связи между ПП2 и ЦП;
- системы единого времени.
Периферийные пункты предназначены для приема и хранения сигналов ИРИ и передачи на ЦП по команде фрагментов хранящихся сигналов.
ЦП предназначен для приема и хранения сигналов ИРИ, предварительной обработки принятых сигналов, формирования запросов для ПП на передачу фрагментов сигналов, вычисления разностей времен приема сигнала ИРИ на ПП и ЦП, вычисления и визуализации результатов пеленгования ИРИ.
Каналы связи предназначены для передачи с ЦП на ПП запросов на передачу фрагментов сигнала и передачи с ПП на ЦП фрагментов сигнала.
Система единого времени предназначена для синхронизации работы ПП и ЦП.
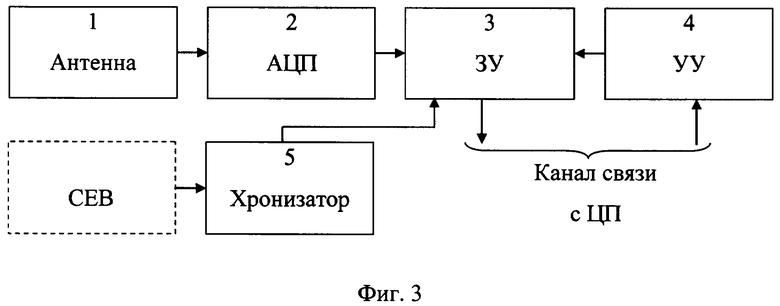
Каждый ПП (фиг.3) состоит из:
- антенны 1;
- аналого-цифрового преобразователя (АЦП) 2;
- запоминающего устройства (ЗУ) 3;
- устройства управления (УУ) 4;
- хронизатора 5.
При этом выход антенны 1 подключен к первому входу ЗУ 3 через АЦП 2, выход УУ 4 подключен к управляющему входу ЗУ 3, а вход УУ 4 подключен к каналу связи, выход ЗУ 3 подключен к каналу связи, выход хронизатора 5 подключен ко второму входу ЗУ 3, вход хронизатора 5 подключен к системе единого времени.
Антенна 1 предназначена для приема сигналов в заданном диапазоне частот.
АЦП 2 предназначен для преобразования аналогового сигнала с выхода антенны 1 в последовательность цифровых значений уровня сигнала.
ЗУ 3 предназначено для временного хранения принятых излучений в виде цифровых значений уровня сигнала с привязкой к времени приема и для передачи в канал связи фрагмента хранящейся информации по команде от УУ 4.
УУ 4 предназначено для получения из канала связи команд от ЦП и формирования команд для ЗУ 3 на передачу в канал связи фрагмента хранящейся информации.
Хронизатор 5 представляет собой привязанный к шкале системы единого времени хранитель шкалы текущего времени (часы), предназначенный для привязки записываемых в ЗУ 3 значений уровня сигнала к значению времени приема.
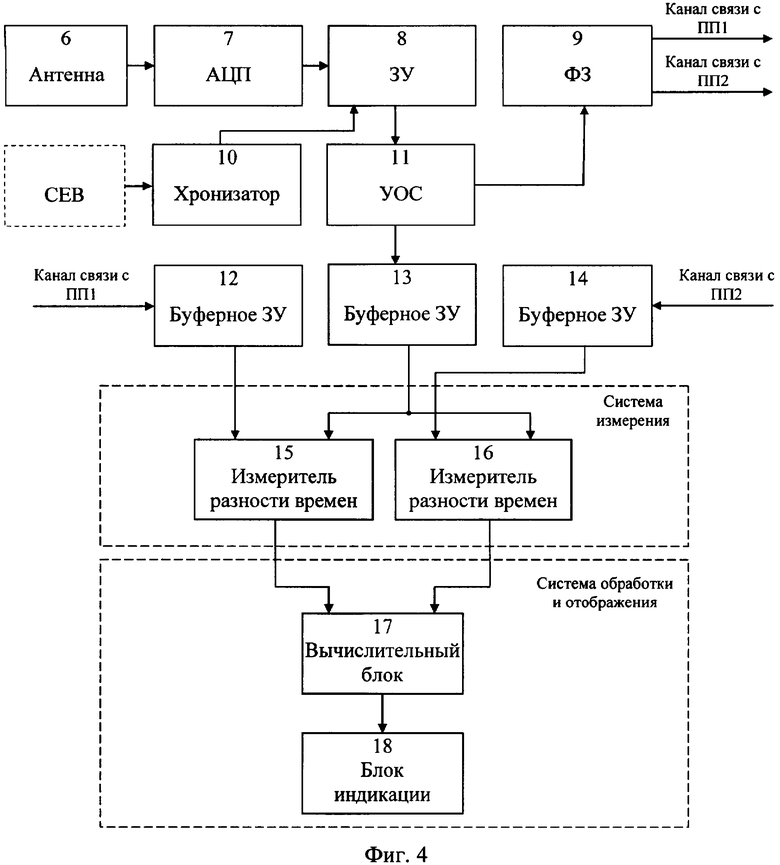
ЦП состоит из:
- антенны 6;
- АЦП 7;
- ЗУ 8;
- формирователя запросов (ФЗ) 9;
- хронизатора 10;
- устройства обработки сигналов (УОС) 11;
- буферного ЗУ 12;
- буферного ЗУ 13;
- буферного ЗУ 14;
- системы измерения, содержащей два блока измерения разностей времен приема сигнала ИРИ 15 и 16;
- системы обработки и отображения, содержащей вычислительный блок 17 и блок 18, осуществляющий визуализацию результатов.
При этом выход антенны 6 подключен через АЦП 7 к первому входу ЗУ 8, ко второму входу которого подключен выход хронизатора 10, вход которого подключен к системе единого времени, а выход ЗУ 8 подключен ко входу УОС 11, первый выход которого подключен ко входу буферного ЗУ 13, а второй выход - ко входу ФЗ 9. Первый и второй выходы ФЗ 9 через каналы связи соединены со входами УУ 4, входящих в состав ПП1 и ПП2 соответственно.
Входы буферных ЗУ 12 и 14 через каналы связи соединены с выходами ЗУ 3, входящих в состав ПП1 и ПП2 соответственно. Выходы буферных ЗУ 12 и 14 подключены к первым входам измерителей разности времен 15 и 16 соответственно, выход буферного ЗУ 13 подключен ко вторым входам измерителей разности времен 15 и 16 одновременно.
Выходы измерителей разностей времен 15 и 16 подключены соответственно к первому и второму входам вычислительного блока 17, выход которого подключен ко входу блока индикации 18.
Антенна 6 предназначена для приема сигналов в заданном диапазоне частот.
АЦП 7 предназначен для преобразования аналогового сигнала с выхода антенны 6 в последовательность цифровых значений уровня сигнала.
ЗУ 8 предназначено для временного хранения принятых излучений в виде цифровых значений уровня сигнала с привязкой ко времени приема и передачи в УОС 11 для обработки.
ФЗ 9 предназначен для формирования и передачи в каналы связи запросов на ПП1 и ПП2.
Хронизатор 10 представляет собой привязанный к шкале системы единого времени хранитель шкалы текущего времени (часы), предназначенный для привязки записываемых в ЗУ 8 значений уровня сигнала к значению времени приема.
Устройства обработки сигналов (УОС) 11 предназначено для обработки сигналов, включающей следующие процедуры:
- обнаружение сигнала;
- измерение ширины спектра обнаруженного сигнала Δfc;
- поиск и выделение фрагмента сигнала, имеющего длительность τфр=1/4/Δfc и ширину спектра Δfфр=Δfc.
Буферные ЗУ 12, 13 и 14 предназначены для временного хранения и передачи в измерители разностей времен 15 и 16 фрагментов сигнала, принятого на ПП1, ЦП и ПП2 соответственно.
Измерители разностей времен 15 и 16 предназначены для измерения разностей времен прихода сигнала ИРИ на ПП1 и ЦП и ПП2 и ЦП.
Вычислительный блок 17 обеспечивает вычисление местоположения ИРИ. Блок индикации 18 предназначен для отображения в удобном виде полученных результатов.
Заявляемое устройство функционирует следующим образом.
ПП1, ПП2 и ЦП ведут независимый прием в заданной полосе частот. Сигнал ИРИ s(t) поступает на антенны 1 и 6 ПП и ЦП соответственно в виде аддитивной смеси сигнальной и шумовых составляющих:
sц(t)=s(t+τц)+uшц(t), s1(t)=s(t+τ1)+uш1(t), s2(t)=s(t+τ2)+uш2(t),
где τц, τ1, τ2 - время распространения сигнала от ИРИ до ЦП, ПП1 и ПП2 соответственно;
t - текущее время;
индексы ц, 1 и 2 соответствуют ЦП, ПП1 и ПП2.
На ПП выходное напряжение антенны 1 поступает на вход АЦП 2, с выхода которого цифровой поток поступает на вход ЗУ 2, имеющего объем VЗУ1. На второй вход ЗУ 2 поступают значения текущего времени от хронизатора 5. В ЗУ 2 дискретные значения уровня сигнала хранятся с привязкой к шкале времени хронизатора 5. Шкала времени хронизатора 5 синхронизирована со шкалой системы единого времени (СЕВ).
На ЦП выходное напряжение антенны 6 поступает на вход АЦП 7, с выхода которого цифровой поток поступает на вход ЗУ 8, имеющего объем VЗУ2. На второй вход ЗУ 8 поступают значения текущего времени от хронизатора 10. В ЗУ 8 дискретные значения уровня сигнала хранятся с привязкой к шкале времени хронизатора 10. Шкала времени хронизатора 10 синхронизирована со шкалой системы единого времени (СЕВ). Данные из ЗУ 8 поступают в УОС 11 на обработку, целями которой являются:
- обнаружение сигнала;
- измерение ширины спектра сигнала Δfc;
- поиск и выделение фрагмента сигнала, имеющего длительность τфр=/Δfс и ширину спектра Δfс=Δfс. Такой фрагмент является наиболее информативным с точки зрения координатометрии, поскольку имеет минимальную ширину основного пика автокорреляционной функции, что позволяет минимизировать погрешность измерения разности времен прихода сигнала в разнесенные приемные пункты. Для разных видов модуляции сигналов могут использоваться различные базисы для построения спектра.
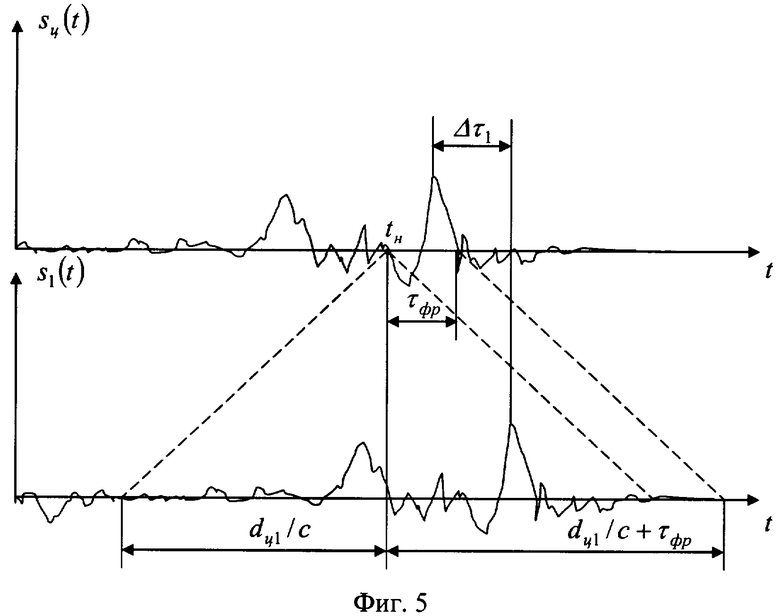
Выделенный фрагмент записывается в буферное ЗУ 13. Время начала выделенного фрагмента tн передается из УОС 11 в ФЗ 9, который формирует запросы для УУ 4 на передачу данных, хранящихся в ЗУ 3 ПП1 и ПП2.
Поскольку максимальная разность времен приема сигнала ИРИ на ЦП и ПП1
Δτmax1=max|τц-τ1|=dц1/с,
где dц1 - дальность от ПП1 до ЦП;
с - скорость распространения излучения,
то на ПП1 передается запрос на передачу на ЦП фрагмента хранящихся в ЗУ 3 данных с момента времени (tн-Δτmax1) до момента времени (tн+Δτmax1+τфр) (фиг.5).
Аналогично на ПП2 передается запрос на передачу на ЦП фрагмента хранящихся в ЗУ 3 данных с момента времени (tн-Δτmax2) до момента времени (tн+Δτmax2+τфр), где
Δτmax2=dц2/с; dц2 - дальность от ПП2 до ЦП.
Получив запрос через канал связи, УУ 4 подает на вход ЗУ 3 команду на передачу требуемых данных на ЦП через канал связи. По команде от УУ 4 ЗУ 3 первого периферийного пункта передает через канал связи набор данных длительностью (2τmax1+τфр) в буферное ЗУ 12, а ЗУ 3 второго периферийного пункта передает через канал связи набор данных длительностью
(2τmax2+τфр) в буферное ЗУ 14.
После заполнения буферных ЗУ 13, 12 и 14 данными из ЗУ 8 и ЗУ 3 первого и второго ПП, эти данные из буферных ЗУ поступают на измерители разностей времен 15 и 16. При этом на первый вход измерителя разности дальностей 15 с выхода буферного ЗУ 12 поступает фрагмент принятого на ПП1 сигнала длительностью
(2τmax1+τфр), а на первый вход измерителя разности дальностей 16 с выхода буферного ЗУ 14 поступает фрагмент принятого на ПП2 сигнала длительностью (2τmax2+τфp). На вторые входы измерителей разности дальностей 15 и 16 с выхода буферного ЗУ 13 поступает фрагмент принятого на ЦП сигнала длительностью τфр.
Объемы VЗУ1 и VЗУ2, характеризующие емкость ЗУ 2 и ЗУ 8 соответственно, должны обеспечивать возможность хранения данных до момента окончания процедур информационного обмена ЦП с ПП1 и ПП2. После истечения максимального значения необходимого времени устаревшие данные могут в ЗУ стираться, а на их место будет осуществляться запись новых данных.
Измеритель разности времен 15 осуществляет измерение разности времен приема сигнала Δτ1=τц-τ1 путем нахождения максимума взаимокорреляционной функции [3] фрагментов принятого на ЦП и ПП1 сигнала, поступивших на вход измерителя разности времен 15 из буферных ЗУ 12 и 13.
Аналогично измеритель разности времен 16 осуществляет измерение разности времен приема сигнала Δτ2=τц-τ2 путем нахождения максимума взаимокорреляционной функции фрагментов принятого на ЦП и ПП2 сигнала, поступивших на вход измерителя разности времен 16 из буферных ЗУ 14 и 13.
Измеренные значения Δτ1, и Δτ2 поступают на первый и второй входы вычислительного блока 17 соответственно.
Вычислительный блок 17 представляет собой специализированное вычислительное устройство, в котором последовательно выполняются следующие операции:
- вычисляются значения разностей дальностей Δr1ц, Δr2ц и Δr12 с использованием выражений
Δr1ц=Δτ1·νЭВМ, Δr2ц=Δτ2·νЭВМ, Δr12=Δr1-Δr2,
- вычисляется значение γ азимута ИРИ с использованием выражения

- вычисляются значения xf, уf координат точки F, принадлежащей линии положения ИРИ, с использованием выражений:

Необходимые для проведения вычислений априорно известные значения:
- νЭМВ - скорости распространения электромагнитной волны;
- α - половины расстояния между периферийными пунктами;
- xц, yц - координат антенны 6 в прямоугольной системе координат Оху, ось Ох которой проходит через ПП1 и ПП2, ось Оу которой проходит через середину отрезка, образуемого ПП1 и ПП2, хранятся в памяти вычислительного блока 17.
Вычисленные значения γ, xf, yf с выхода вычислительного блока 17 поступают в блок индикации 18, который предназначен для визуализации результатов пеленгования.
При проведении эксперимента в качестве ЗУ 3 и ЗУ 8 использовались накопители на жестких магнитных дисках (НЖМД), входящие в состав ПЭВМ. Сигналы с выхода разнесенных приемных антенн через АЦП с характеристиками:
- частота дискретизации - 125 МГц;
- разрядность - 10 бит,
записывались в виде файлов на НЖМД двух разнесенных компьютеров, соединенных в сеть. На компьютере, моделирующем ЦП, осуществлялся процесс обнаружения сигналов, отбор координатно-информативных фрагментов и формирование запросов на передачу фрагментов с удаленного компьютера. После получения запрошенного фрагмента сигнала с компьютера, моделирующего ПП, вычислялось значение разности времен приема сигнала в разнесенных точках. Синхронизация работы компьютеров осуществлялась посредством аппаратуры потребителей системы космической навигации Навстар. Эксперимент подтвердил практическую реализуемость предлагаемого устройства.
Таким образом, предлагаемый разнесенный разностно-дальномерный пеленгатор, по сравнению с прототипом, обеспечивает высокую точность пеленгования за счет возможности организации большой измерительной базы при отсутствии необходимости передачи всех данных с периферийных приемных пунктов на центральный пункт приема и обработки, то есть ограничения на пропускную способность каналов связи между периферийными и центральным пунктами приема сигнала отсутствуют.
СПИСОК ЛИТЕРАТУРЫ
1. Шебшаевич B.C. Введение в теорию космической навигации. - М.: Сов. радио, 1971. - 296 с.
2. Дулевич В.Е., Коростелев А.А., Мельник Ю.А. и др. Теоретические основы радиолокации/Под ред. В.Е.Дулевича. - М.: Сов. радио, 1964. - 732 с.
3. Теоретические основы радиолокации. Учебное пособие для вузов/Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970. - 560 с.
4. Финкельштейн М.И. Основы радиолокации. - М.: Сов. радио, 1973. - 496 с.
5. Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975. - 336 с.
6. Клименко Н.Н., Клименко С. В. Современное состояние теории и практики радиоинтерферометрии//Зарубежная радиоэлектроника, 1990, №1. - С.3-14.
7. Международная космическая радиотехническая система обнаружения терпящих бедствие/Под ред. В.С.Шебшаевича. - М.: Радио и связь, 1987. - 376 с.
8. Корн Г., Корн М. Справочник по математике для научных работников и инженеров. - М.: Наука, 1984. - 832 с.
9. Wuu Chenn, Pearson Allan E. On time deley estimation involving received signals/IЕЕЕ Trans. Acowit., Speech, and Signal Process., 1984, 32, N4, C.828-835.
10. Радиопеленгационная система, использующая круглую антенную решетку. Пат.4633257, США.
11. Пеленгатор: А.с. 1555695 СССР, МКИ5 G01S 3/46 /Дикарев В.И., Провоторов Г.Ф., Шерстобитов В.В.
12. Активная радиоинтерференционная система. Пат. 57-51632, Япония.
13. Интерферометр. Пат.290308, ГДР.
14. Способ и аппаратура для пеленгации и частотной идентификации. Пат. 4443801, США.
15. Одноточечная система определения местоположения. Пат. 4819053, США.
16. Способ определения местоположения передатчика путем измерения разности времен задержек. Пат. 274102, ГДР.
17. Метод гиперболического определения места и устройство для его реализации. Пат. 229866, ГДР.
18. Радиопеленгатор. Пат. 57-51910, Япония.
19. Пеленгование источника радиоизлучений с помощью адаптивной антенной решетки. Пат. 4862180, США.
20. Сайбель А.Г. РДМ способ пеленгования ИРИ и реализующее его устройство. Патент РФ №2258242 от 31.05.2005.
21. Многопозиционные радиотехнические системы/Под ред. проф. В.В.Цветнова. - М.: Радио и связь, 1986. - 264 с.
Использование: в широкобазовых комплексах радиомониторинга для определения азимута источника радиоизлучения (ИРИ). Достигаемый технический результат - снятие ограничений на пропускную способность каналов связи между периферийными и центральным пунктами в разнесенных комплексах радиомониторинга. Сущность изобретения: вместо ретрансляции сигнала с периферийного на центральный пункт передается его значимый (с точки зрения информативности координатометрии) фрагмент. Предлагаемое устройство состоит из двух периферийных пунктов (ПП), центрального пункта приема (ЦП) и обработки, каналов связи между ПП и ЦП, системы единого времени, при этом каждый ПП состоит из антенны, аналого-цифрового преобразователя (АЦП), запоминающего устройства (ЗУ), устройства управления (УУ) и хронизатора; ЦП состоит из антенны, АЦП, ЗУ, формирователя запросов, хронизатора, устройства обработки сигналов, трех буферных ЗУ, системы измерения, содержащей два блока измерения разностей времен приема сигнала ИРИ, системы обработки и отображения, содержащей вычислительный блок и блок, осуществляющий визуализацию результатов. 5 ил.
Устройство для определения азимута источника радиоизлучения, содержащее три антенны, первый и второй измерители разности времен приема сигнала, вычислительный блок, предназначенный для вычисления местоположения источника радиоизлучения, и блок индикации, отличающееся тем, что состоит из трех пространственно разнесенных пунктов, два из которых являются периферийными приемными пунктами, соединенными каналами связи с центральным пунктом приема и обработки, при этом в состав каждого периферийного приемного пункта входит антенна 1, выход которой соединен с входом аналого-цифрового преобразователя 2, выход которого подключен к первому входу запоминающего устройства 3, к второму входу которого подключен выход хронизатора 5, вход которого подключен к системе единого времени, управляющий вход запоминающего устройства 3 соединен с выходом устройства управления 4, предназначенного для формирования команд на передачу в канал управления соответствующего фрагмента хранящейся информации, а выход запоминающего устройства 3 подключен к каналу связи с центральным пунктом приема и обработки; в состав центрального пункта приема и обработки входит антенна 6, выход которой соединен со входом аналого-цифрового преобразователя 7, выход которого подключен к первому входу запоминающего устройства 8, к второму входу которого подключен выход хронизатора 10, вход которого подключен к системе единого времени, выход запоминающего устройства 8 подключен к входу устройства обработки сигналов 11, предназначенного для обнаружения сигнала источника радиоизлучения, измерения ширины спектра обнаруженного сигнала, поиска и выделения фрагмента сигнала, имеющего соответствующие длительность и ширину спектра, при этом первый выход устройства обработки сигналов 11 соединен с входом буферного запоминающего устройства 13, а второй выход - с входом формирователя запросов 9, первый выход которого соединен через канал связи с входом устройства управления 4, входящего в состав первого периферийного приемного пункта, а второй выход - с входом устройства управления 4, входящего в состав второго периферийного приемного пункта, входы буферных запоминающих устройств 12 и 14 соединены через каналы связи с выходами запоминающих устройств 3, входящих в состав первого и второго периферийных приемных пунктов соответственно; выходы буферных запоминающих устройств 12 и 14 подключены к первым входам соответственно первого и второго измерителей разности времен приема сигнала, выход буферного запоминающего устройства 13 подключен к вторым входам первого и второго измерителей разности времен приема сигнала, выходы измерителей разности времен приема сигнала подключены соответственно к первому и второму входам указанного вычислительного блока, выход которого подключен к входу блока индикации.
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2003 |
|
RU2258242C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2001 |
|
RU2196341C1 |
| RU 2006122641 A, 20.01.2008 | |||
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОСТАНЦИИ ПО РАЗНОСТИ ПРИХОДА РАДИОСИГНАЛА ВО ВРЕМЕНИ В ПУНКТЫ ПРИЕМА | 1993 |
|
RU2096800C1 |
| WO 2005059584 А1, 10.06.2005 | |||
| US 5477230 А, 19.12.1995 | |||
| US 4443801 A, 17.04.1984 | |||
| АППАРАТ ДЛЯ ВЫКЛАДКИ ОТПЕЧАТАННЫХ ЛИСТОВ В ПЛОСКИХ СКОРОПЕЧАТНЫХ МАШИНАХ | 1929 |
|
SU19230A1 |
| СПОСОБ КИСЛОТНОЙ ОБРАБОТКИ КАРБОНАТНОГО ПЛАСТА | 2013 |
|
RU2535538C1 |

